基于通讯的列车控制(CBTC)
- 格式:pptx
- 大小:1.40 MB
- 文档页数:84
西南交大的课件第1节基于通信的列车控制系统概述《列控车载设备》、《列控地面设备》徐啸明,中国铁道出版社,2007《闭塞与列控》付世善,中国铁道出版社,20061.CBTC的发展前提和前景19世纪中叶出现火车之后,立即就有人研究如何控制火车安全运行问题。
早期,为了保证列车的安全,所以采用人骑马作为列车运行先导,以后又用过在一定距离设置导运人员,挥旗来表达列车可否安全前行。
1930年在英国开始第一次应用横木式带灯光的信号机,而美国在1932年采用在柱子上挂黑球或白球来对列车指示停车或通过。
1941年臂板信号才正式诞生在英国。
1932年莫尔斯电报机发明后,很快就引人到铁路。
1941年英国人提出闭塞电报机专利,并于1951年在英国铁路获得普及应用。
1976年发明了电话,又为铁路应用构成电话闭塞,这种方法至今在特殊情况下,如地震、洪水后等应急时尚有应用。
除了上述两种方法,还有应用路签机和路牌机方法,1979年英国人泰尔(Tyres)发明电气路牌机,即两相邻车站各有一个路牌机,它们之间有电气联接,两站之间有列车运行,一定要领到一个路牌才能作为运行的凭证。
而在平时,在一个时间内只允许有一个路牌从中取出,以此保证行车安全。
1999年英国人韦布和汤姆森( Webb and Thomson)发明了电气路签机,它工作原理与电气路牌机相似,即平时在一组路签机中只能取出一枚路签供运行的列车司机作为行车凭证。
从宏观来分析,列车运行控制系统实际上包含下列几个部分:1. 车站的列车运行控制系统它一般以车站联锁来表达。
在一个车站内,将车站内的道岔,进站、出站、调车信号机,车站主干线、车站股道等三大部分之间按一定联锁关系构成系统,为列车创造行车进路或调车进路,它既要保证行车安全,又要保证行车效率。
2. 区间的列车运行控制系统它是指列车在所有车站与车站之间运行的控制系统,其目的是保证它们的安全运行、提高行车效率和提供信息。
3. 驼峰编组站运行控制系统从逻辑控制使用来区分,上述三方面系统是各自独立的,即它们的硬件系统和软件系统都独立,它们的研究开发、设计、生产、使用等可以彼此不相干。


城市轨道交通CBTC系统关键技术探讨随着计算机和通讯技术的飞速发展,自动控制技术也得以迅猛发展,广泛应用于城市轨道交通行业。
为提高城市轨道交通的运营效率,人们研发出一种基于无线通信的列车自动控制系统,即CBTC系统。
文章主要就轨道交通CBTC系统关键技术进行了相关的分析,以供参考。
标签:城市轨道交通;CBTC系统关键技术;列车自动驾驶子系统(ATO)目前我国城市轨道交通运行速度和运行密度的不断提高,实现高水平列车自动驾驶的系统功能则成为CBTC信号系统的关键。
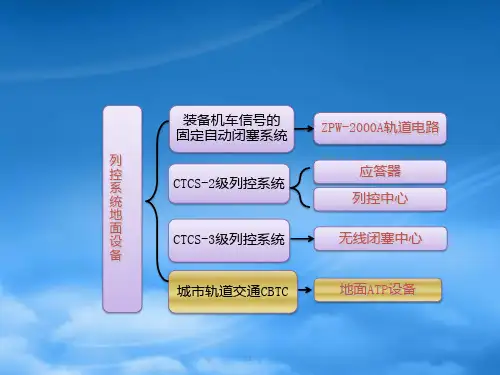
一、CBTC系统及其构成CBTC系统由ATS子系统、ATP、ATO子系统、联锁子系统、DCS子系统等构成,各子系统均采用模块化设计。
ATP子系统是保证行车安全、防止错误进路、防止列车进入前方列车占用区段和防止超速运行的设备。
ATP负责全部的列车运行保护,是列车安全运行的保障。
ATO即列车自动驾驶,它代替司机操纵列车驱动、制动设备,自动实现列车的启动、加速、匀速惰性、制动等驾驶功能。
在ATP系统的基础上安装了ATO系统,列车就可以采用手动方式或自动方式行驶。
ATS在ATP和ATO系统的支持下,根据运行时刻表完成对列车运行的自动监控,可自动或由人工监督和控制正线(车辆段、试车线除外),及向调度员和外部系统提供信息。
DCS数据通信系统的主要作用是在各个子系统之间传输ATC 报文。
(一)CBTC技术组成CBTC 技术包括:⑴无线通信技术,⑵移动闭塞技术,⑶列车定位技术。
由于CBTC 是基于无线通信的列车控制系统,自然离不开通信技术的支持。
无线通信的种类很多,常见的有基于OFDM(正交频分复用技术)通信、扩展频谱通信、跳频技术、WLAN(无线局域网)技术。
移动闭塞是实现CBTC的关键技术之一,CBTC是这种闭塞方式的应用系统。
它与固定闭塞相比,其最显著的特点是取消了以信号机分隔的固定闭塞区间。
列车在线路上运营的间隔距离由列车在线路上的实际位置和运行情况确定,闭塞区间随列车的形势,不断变化,故称为移动闭塞。

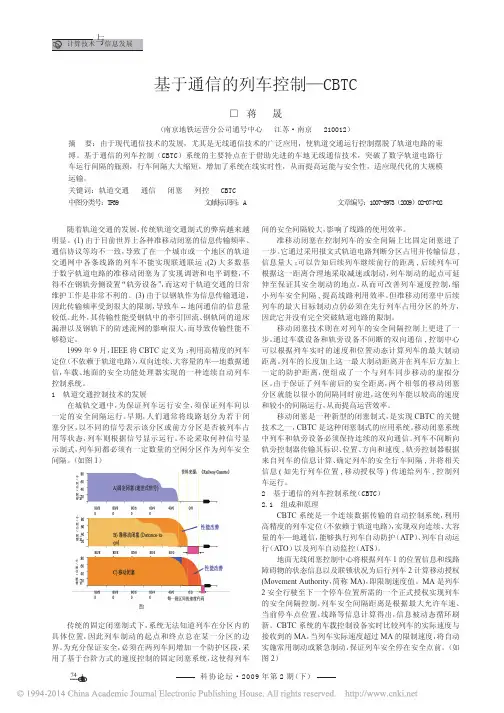
简述CBTC技术摘要:移动闭塞是基于通信技术的列车控制(简称CBTC)系统,该系统是利用通信技术实现“车地通信”并实时地传递“列车定位”信息。
系统通过建立车地之间连续、双向、高速的通信,使列车命令和状态可以在车辆和地面之间进行实时可靠的交换,并确定列车的准确位置及列车间的相对距离,保证列车的安全间隔。
本文阐述了轨道电路的缺点及CBTC技术的特性。
关键词:移动闭塞CBTC轨道电路CBTC起源及特性随着计算机技术、通信技术、自动控制技术的发展,综合以上技术产生了“基于通信的列车控制系统”(Communication-based Train Control,简称CBTC)。
CBTC相比传统的铁路信号系统有着诸多特性,比如:1、以无线通信系统代替,减少电缆铺设、轨旁设备,降低维护成本。
2、可以实现车辆与控制中心的双向通信,大幅度提高了列车区间通过能力。
3、信息传输流量大、效率高、速度快,容易实现移动自动闭塞系统。
4、容易适应各种车型、不同车速、不同运量、不同牵引方式的列车,兼容性强。
5、可以将信息分类传输,集中发送和集中处理,提高调度中心工作效率。
6、便于既有线改造升级。
CBTC技术组成CBTC技术包括:1、无线通信技术,2、移动闭塞技术,3列车定位技术。
由于CBTC是基于无线通信的列车控制系统,自然离不开通信技术的支持。
无线通信的种类很多,常见的有基于OFDM(正交频分复用技术)通信、扩展频谱通信、跳频技术、WLAN(无线局域网)技术。
移动闭塞是实现CBTC的关键技术之一,CBTC是这种闭塞方式的应用系统。
它与固定闭塞相比,其最显著的特点是取消了以信号机分隔的固定闭塞区间。
列车在线路上运营的间隔距离由列车在线路上的实际位置和运行情况确定,闭塞区间随列车的形势,不断变化,故称为移动闭塞。
列车定位技术有很多种:1、轨道电路定位,2、计轴定位,3信标定位(分有源、无源两种,往往两种会同时使用),4、多普勒雷达测速定位等定位方式。
浅谈CBTC和CTCS列车运行控制系统摘要:随着我国城市轨道交通和客运专线及高速铁路的飞速发展,两种列成运行控制系统应运而生,即CBTC(Communications-based Train Control)和CTCS(Chinese Train Control System)列车运行控制系统。
CBTC技术发源于欧洲连续式列车控制系统,经多年的发展,取得了长足的进步。
CTCS是铁道部立项自主研发的适合我国国情的新一代列车运行控制系统。
关键词:列车控制系统;CBTC;CTCS;联锁;轨道电路1 CBTC列控系统基于通信的列车控制(CBTC)系统独立于轨道电路,采用高精度的列车定位和连续、高速、双向的数据通信,通过车载和地面安全实现对列车的控制。
如今包括阿尔卡特、西门子、阿尔斯通等多家列车控制系统设备提供商均开发了自己的CBTC系统,并在温哥华、伦敦、巴黎、香港、武汉等多个城市的轨道交通线上运行。
1.1 CBTC系统的结构:整个无线CBTC系统包括的子系统有列车制动监控(ATS)系统、数据通信系统(DSC)、区域控制器(ZC)、车载控制器(VOBC)及司机显示(TOD)等,子系统之间的通信基于开放的、标准的数据通信系统。
地面与移动的列车之间都基于无线通信进行信息交换。
1.2 CBTC系统的基础CBTC系统引入了无线通信子系统,建立车地之间连续、双向、高速的通信,列车的命令和状态可以在车辆和地面设备之间可靠交换,使系统的主体CBTC 地面设备和受控对象列车紧密的连接在一起。
所以,“车地通信”是CBTC系统的基础,CBTC系统的另外一个基础则是“列车定位”。
只有确定了列车的准确位置,才能计算出列车间的相对距离,保证列车的安全间隔;也只有确定了列车的准确位置,才能保证根据线路条件,对列车进行限速或者与地面设备发生联锁。
1.2.1 车地通信原理CBTC采用无线通信系统进行车地通信。
无线通信系统包括轨旁无线单元(WRU)和车载无线单元(OBRU)两个部分。
基于通信的列车控制(CBTC)性能及功能要求-IEEE标准摘要在这个标准中,表述了基于通信的列车控制(CBTC)系统的功能要求和性能。
CBTC系统是一个连续,利用高分辨率的列车位置确定独立轨道电路的自动列车控制系统;连续,大容量,双向列车到路旁数据通信;和列车承载及路边的处理器,能够实现自动列车保护(ATP)功能,以及可选的列车自动驾驶(ATO)和列车自动监督(ATS)功能。
除了CBTC功能要求,这标准还定义了CBTC系统的车载标准,系统安全标准,系统可用性标准。
本标准适用于全方位的交通应用包括自动旅客捷运系统。
关键词:自动化,通信,信号,列车控制5性能要求5.1 CBTC 系统影响追踪间隔的因素应由运营管理部门来指定正向和反向运行所要求的设计和追踪间隔(也就是最小的和计划的追踪间隔),追踪间隔可以指定为无干扰的和/或有干扰的两种。
所有的情况下,追踪间隔的设计应该考虑安全列车间隔需求和 6.1.2.1 中描述的安全制动模型的限制。
在无干扰追踪间隔情况下,列车速度曲线不受前行列车影响,所有列车的最大允许速度取决与列车本身速度限制、加速度、制动能力;在给定停站时间的前提下,以无干扰追踪间隔运行得到最小的端到端的旅行时间。
在有干扰追踪间隔情况下,追踪间隔可以缩短(代价是旅行时间增加),此时列车的速度曲线受前行列车的影响,列车在接近车站时会减速并以减小的速度进入车站区域。
对于特定线路和特定车辆的设计,追踪间隔还受到很多其它非CBTC 因素的影响(例如,轨道的走向、坡度、土建限速、列车加速度和制动率、停站时间、轨道末端的配置和司机的反应时间等)。
这些因素由运营管理部门在各线路的专用技术规格中指定。
本标准只是表述了影响可获得追踪间隔的CBTC 因素,其中最重要的因素是:a)位置(包括列车车头车尾位置的测量精度以及列车接收到的移动授权的分辨率),还包括列车定位报告和移动授权更新的频率。
b)速度,包括速度测量精度和在给定位置上列车接收到的速度限制的分辨率。