槽轮机构运动仿真教程
- 格式:doc
- 大小:431.50 KB
- 文档页数:7
湖南农业大学工学院课程设计说明书课程名称:机械CAD/CAM课程设计题目名称:槽轮机构运动学仿真班级:20 11 级机制专业四班姓名:学号:指导教师:评定成绩:教师评语:指导老师签名:20 年月日目录摘要 (1)关键词 (1)1 槽轮机构的结构组成和工作原理 (1)2 零件三维实体模型建立的方法 (1)2.1 主动转盘三维实体模型建立的方法 (1)2.2 从动槽轮三维实体模型建立的方法 (3)2.3 其他零件三维实体模型建立的方法 (4)3 装配模型建立的方法和步骤 (6)4 建立装配模型的运动仿真 (9)5 装配模型的运动仿真分析 (13)6 装配模型的运动仿真分析结论 (15)7 装配模型图集 (16)7.1 总成图 (16)7.2 爆炸图 (16)7.3 零件图 (17)7.4 主动转盘工程图 (18)8 总结 (19)参考文献.......................................... (19)槽轮机构运动学仿真学生:(工学院,11-机制4班,学号)摘要:槽轮机构是将主动拨盘的连续转动转化为从动槽轮的间歇转动,以达到间歇进给、转位和分度等工作要求。
运用Pro/E软件对槽轮机构进行三维实体建模及装配,并运用模块进行运动仿真分析,得出机构的角速度、角加速度随时间变化的曲线。
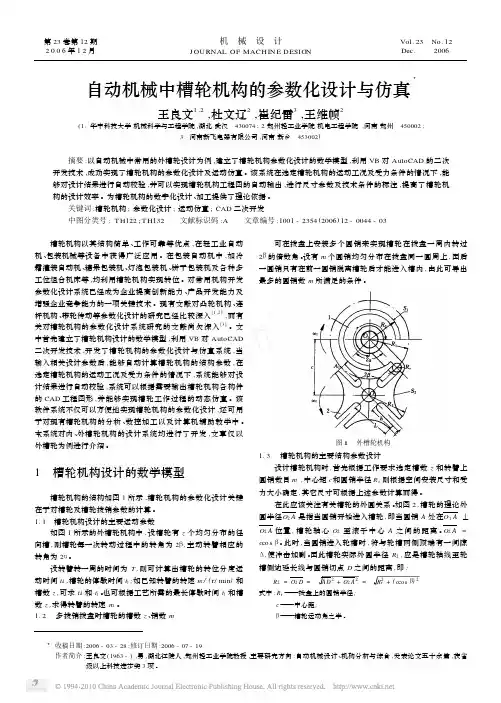
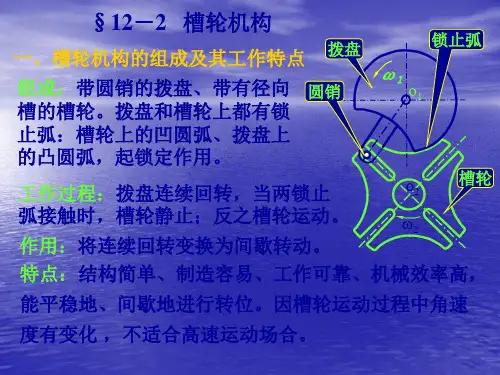
关键词:槽轮机构;间歇运动;运动仿真1、槽轮机构的结构组成和工作原理槽轮机构由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构典型结构由主动转盘、从动槽轮和机架组成。
2、零件三维实体模型建立的方法2.1、主动转盘三维实体模型建立的方法②选择模板④拉伸2.2、从动槽轮三维实体模型建立的方法②选择模板2.3、其他零件三维实体模型建立的方法3、装配模型建立的方法和步骤4、建立装配模型的运动仿真5、装配模型的运动仿真分析打开“测量”,新建测量,测量槽轮边沿上一点“PNT0”,的位置,速度,加速度以及槽轮转动的角位移,角速度,角加速度。
基于Matlab的曲线槽槽轮机构动力学仿真
张俊;刘海生;金建新
【期刊名称】《湖北文理学院学报》
【年(卷),期】2005(026)002
【摘要】建立了曲线槽槽轮机构的动力学数学模型,介绍了运用Matlab/Simulink 软件进行动力学仿真的方法和具体操作步骤.通过实例验证表明,该仿真方法直观精确,提高了效率.
【总页数】3页(P61-63)
【作者】张俊;刘海生;金建新
【作者单位】襄樊学院,机械工程系,湖北,襄樊,441053;襄樊学院,机械工程系,湖北,襄樊,441053;华中科技大学,机械学院,湖北,武汉,430074
【正文语种】中文
【中图分类】TH122
【相关文献】
1.基于ADAMS槽轮机构动力学仿真 [J], 宋国亚;王晖;赵俊鹏;常笑鹏
2.基于UG的曲线槽轮机构设计 [J], 谢晓华
3.基于MATLAB外槽轮机构的运动分析 [J], 熊文伟;张国平
4.基于Matlab的机器海豚直游动力学仿真 [J], 王全吉;巩伟杰
5.基于MATLAB/Simulink的横风作用下车辆侧向动力学仿真 [J], 梅辉;秦永法;张浩文
因版权原因,仅展示原文概要,查看原文内容请购买。
04-槽轮机构的运动分析-104-槽轮机构的运动分析-1% 外槽轮机构运动分析dr=pi/180.0; % 角度与弧度的转换系数% 销轮2转角范围:-f20<f2<f20,步长为bc度,计算运动参数< bdsfid="66" p=""></f2<f20,步长为bc度,计算运动参数<> for z=4:2:10 % 设定槽轮槽数f30=pi/z; % 计算槽轮槽间半角f20=pi/2-f30; % 计算销轮运动半角lmd=sin(pi/z); % 计算曲柄2与机架1的长度比bc=10; % 循环步长cz=-f20/dr; % 循环初值zz=f20/dr; % 循环终值i=1; % 根据步长变化的运动参数矩阵cs行数计数器for f2=cz:bc:zz % 计算槽轮角位移、类角速度、类角加速度wy=atan(lmd*sin(f2*dr)/(1-lmd*cos(f2*dr)));sd=lmd*(cos(f2*dr)-lmd)/(1-2*lmd*cos(f2*dr)+lmd^2);jsd=-lmd*sin(f2*dr)*(1-lmd^2)/(1-2*lmd*cos(f2*dr)+lmd^2)^2;switch z % 矩阵c(i,:)表示第i行的各列元素case 4,c4(i,:)=[f2 wy/dr sd jsd];case 6,c6(i,:)=[f2 wy/dr sd jsd];case 8,c8(i,:)=[f2 wy/dr sd jsd];case 10,c10(i,:)=[f2 wy/dr sd jsd];endi=i+1;endend% 输出外槽轮机构运动参数['轮槽数z=4'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c4(:,1),c4(:,2),c4(:,3),c4(:,4)]['轮槽数z=6'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c6(:,1),c6(:,2),c6(:,3),c6(:,4)]['轮槽数z=8'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c8(:,1),c8(:,2),c8(:,3),c8(:,4)]['轮槽数z=10'][' 销轮转角',' 槽轮角位移',' 角速度',' 角加速度']% 矩阵c(:,j)表示第j列的各行元素[c10(:,1),c10(:,2),c10(:,3),c10(:,4)]%% 绘制槽轮机构运动参数曲线figure(1); % 生成槽轮运动线图窗口subplot(2,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c4(:,1),c4(:,4)) % 绘制z= 4的线图title('外槽轮槽数z=4') % 标注子窗口名称axis([-pi/4/dr pi/4/dr -6 6]) % 定义坐标轴范围grid % 栅格线text(-2,4.2,'\epsilon/\omega^{2}') % 标注类角加速度线图text(20,1.6,'\omega/\omega') % 标注类角速度线图ylabel('槽轮运动线图') % 定义纵坐标轴名称%subplot(2,2,2); % 选择第2个子窗口plot(c6(:,1),c6(:,3),c6(:,1),c6(:,4)) % 绘制z= 6的线图title('外槽轮槽数z=6')axis([-pi/3/dr pi/3/dr -1.5 1.5])gridtext(10,-0.7,'\epsilon/\omega^{2}')text(30,0.7,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,3); % 选择第3个子窗口plot(c8(:,1),c8(:,3),c8(:,1),c8(:,4)) % 绘制z= 8的线图title('外槽轮槽数z=8')axis([-3*pi/8/dr 3*pi/8/dr -0.8 0.8])gridtext(12,-0.3,'\epsilon/\omega^{2}')text(40,0.4,'\omega/\omega')ylabel('槽轮运动线图')%subplot(2,2,4); % 选择第4个子窗口plot(c10(:,1),c10(:,3),c10(:,1),c10(:,4)) % 绘制z=10的线图title('外槽轮槽数z=10')axis([-2*pi/5/dr 2*pi/5/dr -0.5 0.5])gridtext(15,-0.2,'\epsilon/\omega^{2}')text(40,0.3,'\omega/\omega')ylabel('槽轮运动线图')%figure(2); % 生成类线图窗口subplot(1,2,1); % 选择第1个子窗口plot(c4(:,1),c4(:,3),c6(:,1),c6(:,3),c8(:,1),c8(:,3),c10(:,1),c10(:,3)) title('\omega/\omega')axis([-f20/dr f20/dr -0.1 2.5])gridtext(-10,0.35,'z=10')text(-8,0.7,'z=8')text(-8,1.1,'z=6')text(10,2.1,'z=4')ylabel('槽轮类角速度线图')%subplot(1,2,2); % 选择第2个子窗口plot(c4(:,1),c4(:,4),c6(:,1),c6(:,4),c8(:,1),c8(:,4),c10(:,1),c10(:,4)) title('\epsilon/\omega^{2}')axis([-f20/dr f20/dr -5.5 5.5])gridtext(-50,0.2,'z=10')text(-30,0.9,'z=8')text(-25,1.6,'z=6')text(0,3.5,'z=4')ylabel('槽轮类角加速度线图')。
第3讲槽轮机构仿真组长:戴天(2009116224)黄金峰(2009116226)张海龙(2009116220)老师:张俊机制0912班一、启动proe并设置工作目录1.点击【开始】→【所有程序】→【PTC】→【pro engineer】→【pro engineer】,启动proe软件,如图1所示。
图 1 启动proe2.设置工作目录:选择【文件】→【设置工作目录】,选择D盘《3运动仿真槽轮机构》文件夹为工作目录,点击该图框右下方的【确定】键,如图2、图3所示。
图2 设置工作目录图3 打开文件二、新建加工文件1.点击【文件】→【新建】命令,选择类型为【组件】,子类型选择【设计】,将名称改为槽轮26-24-20,将【使用缺省模板】前的对勾去掉,如图4所示。
单击【确定】后弹出【新文件选项】对话框,【模板】选mmns asm design,单击【确定】完成任务的新建,如图5所示。
图4 设置工作文件并命名图5 选择模板三、零件的装配1.预览整个机构效果图单击工作窗口右边工具栏中的【装配】命令,在【打开】命令中单击【caolun.asm】项。
单击【预览】可在框图中查看整个槽轮机构组装好后的效果图,后面的组装皆可按此标准来进行,如图6所示。
图6 打开预览文件2 安装基座(1).单击工作窗口右边的【装配】命令,在【打开】命令中选择groun.prt 文件,即机座(也可以先行【预览】确认一下),点击【打开】,如下图7所示。
图7 打开机座文件(2).导入机座后单击图8中所示【自动】命令右边小三角形,将机座设置为【缺省】模式,当状态栏显示完全约束时,点击面板右端的对勾,完成机座的放置,如图8所示。
图8 设置机座模式3.槽轮的安装(1)同上点击【装配】选中并打开打开第二个文件cam.prt,即槽轮机构,点击工具栏旁的【用户定义】下拉菜单,选择【销钉】连接类型,如下图9所示。
图9 选则连接类型(2)先进行轴对齐,即选择机座机架上groung台的中心线A-4,再选择槽轮的中心线A-6,完成轴对齐。
槽轮机构的有限元分析与仿真槽轮机构的有限元分析与仿真槽轮机构是一种常见的传动机构,广泛应用于机械设备中。
为了更好地理解和优化槽轮机构的性能,有限元分析与仿真成为了一种重要的工具。
本文将介绍槽轮机构有限元分析与仿真的步骤。
第一步是建立几何模型。
首先,根据实际的机构尺寸和形状,使用计算机辅助设计软件绘制出槽轮机构的三维模型。
在建立模型时,需要考虑到槽轮的齿数、齿廓等几何参数。
第二步是定义材料属性。
根据实际使用的材料类型,确定槽轮机构各个零件的材料属性,如弹性模量、泊松比等。
这些属性将影响有限元计算的结果。
第三步是网格划分。
将几何模型转化为有限元网格是有限元分析的关键步骤。
通过将模型划分为许多小的元素,可以对机构的行为进行离散化描述。
网格划分需要考虑到模型的复杂程度和计算的精度。
第四步是施加边界条件和加载条件。
根据机构的实际工作情况,确定边界条件和加载条件。
边界条件包括固定支撑和自由度限制,加载条件包括外力或力矩的施加。
这些条件将影响有限元计算结果的准确性。
第五步是进行有限元分析。
使用有限元分析软件对划分好的网格进行计算。
根据施加的边界条件和加载条件,计算机将通过求解离散化后的方程组,得到机构在给定工况下的应力、变形等结果。
第六步是结果验证与优化。
根据有限元分析的结果,对机构进行性能评估和优化。
如果计算结果与实际情况不符,需要重新检查模型、材料属性、加载条件等,直到达到预期的结果。
最后一步是结果可视化和报告撰写。
将有限元分析的结果可视化展示,如绘制应力云图、变形图等。
报告撰写是有限元分析工作的重要一环,通过清晰地记录分析过程和结果,便于后续参考和交流。
槽轮机构的有限元分析与仿真可以帮助工程师更好地理解和改进机构的性能。
通过逐步进行几何建模、材料定义、网格划分、边界条件与加载条件的设定、有限元分析、结果验证与优化等步骤,可以得到对机构行为的准确描述,并提供优化设计的依据。
CreoProe槽轮机构运动仿真
本篇文章主要分享:Creo/Proe槽轮机构运动仿真,在运动仿真中关于间歇运动的机构里槽轮机构是比较常见的一类,其典型结构由主动转盘、从动槽轮和机架组成,它常被用于将主动件的连续转动转换从从动件的带有停歇的单向周期性转动,下面的文章就结合典型的槽轮机构和大家一起分享槽轮机构的运动仿真装配与仿真过程,具体效果如下图:
机构装配过程
STEP1 新建装配文件,并导入机架,装配方式为:默认(Proe版本为:缺省)
STEP2 装配从动槽轮,装配方式为:销钉连接
①约束轴对齐
②约束平移
③约束旋转轴
STEP3 装配主动转盘,同样采用销钉连接。
旋转轴TOP平面和ASM_FRONT平面,将角度设置为0
STEP4 点击[应用程序]-[机构]进入机构仿真环境中,并添加凸轮连接
STEP5 添加伺服电机。
点击右侧[伺服电机],选择主动转盘的轴作为运动轴
STEP6 创建机构分析,进行运动学分析,时间自定,点击下面的运行即可进行分析
完成效果。
机构运动仿真的一般过程机构运动仿真的一般过程机构运动仿真是利用数学模型分析实际机构动作情况的一种仿真技术,它广泛应用于工业自动化系统控制、机械产品设计等领域。
一般来说,机构运动仿真的一般过程分为以下几个步骤:(1)创建模型。
在进行仿真之前,首先要创建一个可以模拟实际机构运动的数学模型。
这个模型既要考虑到机构的运动特性,又要考虑到涉及到的物理性质,比如力学状态、物理行为等。
在创建模型的过程中,还要考虑到机构中各个元素的位置和组合如何,以及这些元素之间的相互作用。
(2)进行参数设置。
在创建模型之后,接下来要根据实际机构的情况,设置模型中的参数。
这些参数要包括机构的运动参数,以及机构中的一些材料参数。
这些参数的设置要符合实际机构的运动特性及各元素之间的相互作用情况,才能为模拟提供正确的输入参数。
(3)运行仿真。
当模型创建完毕并且设置输入参数之后,就要进行仿真运行,模拟实际机构的运动情况。
在运行仿真之前,要设定一些仿真控制参数,比如仿真步长、仿真时间、数值方法等。
运行完成后,可以获得机构运动的仿真结果,也可以获得关于机构运动的各个性质的数据,包括位置、速度、力矩等。
(4)结果分析。
最后,对仿真结果进行系统的分析,以确定机构运动的性能是否满足要求。
结果分析的时候,要考虑机构运动的各个性质,包括位置、速度、力矩等,以及各个组件之间的相互作用关系。
从而可以有效地分析机构运动的效果,以决定机构的性能是否符合要求。
以上就是机构运动仿真的一般过程。
机构运动仿真能够及时发现机构运动的问题,为机械设计提供参考,从而提高机构的性能和效率。

机械工程基础实验04间歇机构实验实验指导书中国石油大学(北京)机械与储运工程学院实验四 间歇机构实验在各类机械中, 常需要使某些构件实现周期性的运动和停歇。
能将主动件的连续运动转换成从动件有规律的运动和停歇的机构, 称为间歇运动机构。
其中,槽轮机构是各类机械中常用的实现间歇运动的典型机构。
本实验主要针对外槽轮机构分析其运动特性。
【实验目的】1. 了解槽轮机构的运动过程。
2. 学会槽轮机构间歇运动的分析。
3. 培养学生动手能力与数据分析能力。
【实验内容】1.实验仪器CL-I 槽轮机构实验台,其机构主要有四槽轮机构、五槽轮机构和六槽轮机构组成,主要用于检测几种平面槽轮机构的运动规律。
有关击鼓尺寸参数如下:槽轮槽数:Z1=4,Z2=5,Z3=6拨盘圆销数:n1=1,n2=1,n3=1拔销滚子直径:d1=35mm ,d2=32mm ,d3=26mm槽轮中心距:L1=L2=L3=160mm槽轮外径:D1=278.96mm ,D2=260.86mm ,D3=278.34mm2.工作原理如图1所示,槽轮机构是由主动拨销轮、从动槽轮及机架组成,从动槽轮是由多个径向导槽所构成,各个导槽依次间歇地工作。
当主动拨销轮轴匀速转过h θ角时, 拨销拨动槽轮转过一个分度角h τ, 拨销退出导槽;然后拨杆又转过( 2π-h θ) 角, 此时槽轮静止不动, 直到拨销进入下一个导槽内时, 再重复上述过程,槽轮的定位通常是利用拨销轮上外凸的锁止弧锁住, 从而实现槽轮的单向间歇运动。
图1 槽轮机构如图2 所示, O1、O2 分别为从动槽轮和主动拨销轮的中心, A 、B 分别为拨销进入和退出导槽时的状态。
由于拨销在进入和退出导槽时, 其速度方向与导槽的中心线方向保持一致, 因此在这2 个位置上, 拨销轮的半径与槽的中心线相互垂直。
所以,h τ+h θ=π 。
图2 拨销进入和退出导槽轮的位置槽轮机构相关参数:槽轮运动角: β2=zπ2 拨盘运动角: α2=βπ2-拨盘上圆销数目:()22-<Z Z m圆销中心轨迹半径:βsin 1⨯=L R槽轮外径:()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+⨯=21222sin d L R β 槽轮深度:δ++-+=221d L R R h 拨盘回转轴直径:()212R L d -< 拨盘上锁止弧所对中心角:⎪⎭⎫ ⎝⎛-=απm v 2 槽轮每循环运动时间:n z z t r ⎥⎦⎤⎢⎣⎡-=230槽轮每循环停歇时间:()()n mz z m z t d ⎥⎦⎤⎢⎣⎡--=2230槽轮机构的动停比:()()()()222---=z m z z m k当槽轮槽数较大时,一般δ的取值范围为3-6mmTL-I 凸轮机构试验台采用单片机与A/D 转换集成相结合进行数据采集,处理分析及实现与PC 机的通信,达到适时显示运动曲线的目的。
机构运动仿真的一般过程机构运动仿真是指通过计算机模拟机构运动过程,以实现机构运动的设计、分析和优化。
它是机械设计中不可或缺的一部分,可以有效地减少设计时间、降低成本、提高设计精度。
下面将介绍机构运动仿真的一般过程。
第一步:建立机构模型机构模型是机构运动仿真的基础,它是仿真的对象。
建立机构模型的过程包括选择合适的仿真软件、导入设计数据、定义零件特性等。
在建立机构模型时,需要注意选择合适的零件库和材料库,确保模型的准确性和可靠性。
第二步:定义运动副和力学特性运动副是指机构中连接零件并实现相对运动的零件,它是机构运动仿真的核心。
在定义运动副时,需要考虑运动副的类型、运动自由度、转动方向、运动范围等因素。
同时,还需要定义力学特性,如零件的质量、惯性、摩擦等,以便进行后续的力学分析和优化。
第三步:设置运动参数和载荷条件运动参数是指机构中运动副的运动速度、加速度、角度等参数,它是机构运动仿真的输入。
在设置运动参数时,需要考虑机构的实际工作条件,如转速、工作时间等。
同时,还需要设置载荷条件,包括静载荷和动载荷,以便进行机构的强度分析和优化。
第四步:进行仿真计算和分析进行机构运动仿真计算的过程是通过计算机模拟机构的运动过程,以获取机构的运动轨迹、速度、加速度等数据。
在进行仿真计算时,需要注意选择合适的仿真算法和求解器,以保证计算的准确性和稳定性。
同时,还需要进行各种力学分析和优化,如强度分析、刚度分析、动力学分析等,以便对机构的设计进行优化。
第五步:评估仿真结果和优化设计评估仿真结果是指通过对仿真计算的数据进行分析和比较,评估机构的运动性能和强度性能,以便对机构的设计进行优化。
在进行评估时,需要考虑机构的实际工作条件和设计要求,如运动精度、承载能力、寿命等。
同时,还需要进行适当的设计优化,如修改运动副、增加零件强度、减轻重量等,以达到最佳的设计效果。
机构运动仿真的一般过程包括建立机构模型、定义运动副和力学特性、设置运动参数和载荷条件、进行仿真计算和分析、评估仿真结果和优化设计等步骤。
摘要在当今经济全球化、市场竞争日趋激烈的时代,新产品的开发时间成为企业能否在激烈的市场竞争中取胜的关键因素。
传统的产品设计过程中重复计算、重复建模等工作量很大,一直困扰着产品开发人员,严重影响了产品的设计质量和效率。
这种现象在凸轮的设计中尤为突显。
针对这一问题,本课题利用软件中的运动仿真模块对凸轮机构运动进行模拟仿真。
本论文的主要研究内容有:1、沟槽凸轮设计2、沟槽凸轮机构的零部件的实体建模3、沟槽凸轮机构的运动仿真关键词:沟槽凸轮实体建模运动仿真, a . , , a . . , / E ., :1.2.3.: , ,目录绪论 ................................................ 错误!未指定书签。
1.1 本文研究的背景................................... 错误!未指定书签。
1.1.1 我国凸轮机构的研究现状....................... 错误!未指定书签。
1.1.2 我国凸轮机构的研究现状....................... 错误!未指定书签。
1.1.3 国外凸轮机构及其的研究现状.................. 错误!未指定书签。
1.1.4 我国凸轮系统存在的问题....................... 错误!未指定书签。
1.2 本文研究的主要内容............................... 错误!未指定书签。
1.3 本文意义......................................... 错误!未指定书签。
1.4 本章小结......................................... 错误!未指定书签。
2 凸轮机构设计分析 ................................... 错误!未指定书签。
2.1 从动件运动规律的选取............................. 错误!未指定书签。
槽轮机构运动仿真教程1.进入组件设计环境
进入组件设计环境之后开始装配元件,并对其进行约束;
底板:因为底板是不动的,故可设为用户定义中的缺省或固定连接;
主动件:主动件轴线与底板轴线设为销钉连接,主动件底面与底板上面设为平面移动连接;从动件:从动件的连接方式同上。
装配好之后可以按下Ctrl+Alt并单击左键对装配好的元件进行移动,看其是否满足运动所需要的条件。
2进入机构环境(应用程序—机构)
3定义凸轮连接
点击右图标栏--新建进入凸轮连接对话框(如下)
定义凸轮1:单击对话框上的箭头进行曲面的选择,根据运动关系选取主动件上小圆柱的外圆
定义凸轮2:方法同上选取该元件的外表面
由于运动所需点击属性栏里的启用升离
4.定义电机
点击-新建出现如下对话框
选取凸轮1的轴线并在轮廓选项进行以下操作
5.定义运动分析
点击,弹出如下对话框
可以根据需要定义时间和其他选项,运行就OK了(确定后退出)6.回放以前的运动分析
点击弹出如下对话框
点击后弹出如下对话框
调解速度,观察运动过程
7. 动画的生成
单击中的“”,可得到抓帧后的“视频动画”。
【】基于ADAMS的开槽机急回机构仿真设计工学院机制0804设计者:杨公效学号:2007307200643E-mail :qiangliull@指导教师: 李旭荣2011年6月21日一、设计题目题目如图一,为开槽机上用的急回机构。
原动件BC 匀速转动,已知mm a 80=,mm b 200=,mm l AD 100=,mm l DF 400=。
原动件为构件BC ,为匀速转动,角速度2/rad s ωπ=。
对该机构进行运动分析和动力分析。
二、建立模型构件1.设置工作环境对于这个模型,网格间距需要设置成更高的精度以满足要求。
在ADAMS/View 菜单栏中,选择设置(Setting )下拉菜单中的工作网格(W orking Grid )命令。
系统弹出设置工作网格对话框,将网格的尺寸(Size )中的X 和Y 分别设置成750mm 和1000mm ,间距(Spacing )中的X 和Y 都设置成10mm 。
然后点击“OK ”确定。
2.创建机构的各个部件2.1在ADAMS/View 零件库中选择连杆(Link )图标,长度为200mm(mm b 200=),其他参数合理选择。
在ADAMS/View 工作窗口中先用鼠标左键选择点(-80,0,0)mm(该点的位置可以选择在其他地方),然后按照和题目中差不多的倾斜角,点击鼠标左键(本题选择点(-200,160,0)mm),创建出主曲柄BC (PART_2)。
2.2在ADAMS/View 零件库中选择连杆(Link)图标。
在工作窗口中先用鼠标左键选择原点(0,0,0)mm(根据上面创建的主曲柄BC 的位置和题中的条件,副曲柄AC 的位置是唯一的),然后按照和题目中差不多的倾斜角,点击点(-230,290,0)mm ,创建出副曲柄AC (PART_3)。
2.3该步骤将创建主、副曲柄之间的连接部分C ,在ADAMS/View 零件库中选择连杆(Link)图标,参数选择(20,20,10)。
槽轮机构运动仿真教程1.进入组件设计环境
进入组件设计环境之后开始装配元件,并对其进行约束;
底板:因为底板是不动的,故可设为用户定义中的缺省或固定连接;
主动件:主动件轴线与底板轴线设为销钉连接,主动件底面与底板上面设为平面移动连接;从动件:从动件的连接方式同上。
装配好之后可以按下Ctrl+Alt并单击左键对装配好的元件进行移动,看其是否满足运动所需要的条件。
2进入机构环境(应用程序—机构)
3定义凸轮连接
点击右图标栏--新建进入凸轮连接对话框(如下)
定义凸轮1:单击对话框上的箭头进行曲面的选择,根据运动关系选取主动件上小圆柱的外圆
定义凸轮2:方法同上选取该元件的外表面
由于运动所需点击属性栏里的启用升离
4.定义电机
点击-新建出现如下对话框
选取凸轮1的轴线并在轮廓选项进行以下操作
5.定义运动分析
点击,弹出如下对话框
可以根据需要定义时间和其他选项,运行就OK了(确定后退出)6.回放以前的运动分析
点击弹出如下对话框
点击后弹出如下对话框
调解速度,观察运动过程
7. 动画的生成
单击中的“”,可得到抓帧后的“视频动画”。