含时滞半主动悬架及其控制系统
- 格式:pdf
- 大小:234.87 KB
- 文档页数:4
传统的悬架系统的刚度和阻尼是按经验或优化设计的方法确定的,根据这些参数设计的悬架结构,在汽车行驶过程中,其性能是不变的,也是无法进行调节的,使汽车行驶平顺性和乘坐舒适性受到一定影响。
故称传统的悬架系统为被动悬架系统。
如果悬架系统的刚度和阻尼特性能根据汽车的行驶调节(车辆的运动状态和路面状况等)进行动态自适应调节,使悬架系统始终处于最佳减振状态,则称为主动悬架。
主动悬架系统按其是否包含动力源可以分为全主动悬架(有源主动悬架)和半主动悬架(无源主动悬架)系统两大类。
全主动悬架全主动悬架是根据汽车的运动状态和路面状态,适时地调节悬架的刚度和阻尼,使其处于最佳减振状态。
它是在被动悬架(弹性元件、减振器、导向装置)中附加一个可控作用力的装置。
通常由执行机构、测量系统、反馈控制系统和能源系统4部分组成。
执行机构的作用是执行控制系统的指令,一般为发生器或转矩发生器(液压缸、气缸、伺服电动机、电磁铁等)。
测量系统的作用是测量系统各种状态,为控制系统提供依据,包括各种传感器。
控制系统的作用是处理数据和发出各种控制指令,其核心部件是电子计算机。
能源系统的作用是为以上各部分提供能量。
半主动悬架目前,主流的半主动悬架不考虑改变悬架的刚度,而只考虑改变悬架的阻尼,因此它无动力源且只由可控的阻尼元件组成。
由于半主动悬架结构简单,工作时几乎不消耗车辆动力,而且还能获得与全主动悬架相近的性能,故有较好的应用前景。
半主动悬架按阻尼级又可以分成有级式和无级式两种。
(1)有级式半主动悬架它是将悬架系统中的阻尼分为两级、三级或更多级,可由驾驶员选择或根据传感器信号自动进行选择悬架所需要的阻尼级。
也就是说,可以根据路面条件(好路或坏路)和汽车的行驶状态(转弯或制动)等来调节悬架的阻尼级,使悬架适应外界环境的变化,从而可以较大幅度地提高汽车的行驶平顺性和操纵稳定性。
半主动悬架中的三级阻尼可调减振器的旁路控制阀是由调节电动机来带动阀芯转动,使控制阀孔具有关闭,小开和大开3个位置,产生3个阻尼值。
汽车底盘悬挂系统的主动与半主动控制技术应用汽车底盘悬挂系统对于汽车的行驶稳定性和舒适性起着至关重要的作用。
而主动和半主动控制技术的应用,则进一步提升了汽车底盘悬挂系统的性能和效果。
本文将就汽车底盘悬挂系统的主动与半主动控制技术应用进行探讨。
一、主动控制技术的应用主动悬挂系统是指能够主动感知和调节车辆悬挂状态的技术。
通过传感器实时监测路况和车辆行驶状态,再通过控制器对悬挂系统进行调节,使车辆在行驶过程中更加稳定和舒适。
主动悬挂系统的应用,可以使车辆在急转弯、爬坡、减速等情况下更加稳定,有效减少了悬挂系统对车身的影响,提高了行驶安全性。
同时,主动悬挂系统也可以根据路面的不同情况主动进行调节,保证乘坐者在不同路况下的舒适性。
二、半主动控制技术的应用半主动悬挂系统是指能够根据司机的行驶习惯和需要主动进行调节的技术。
通过预设的程序和模式,半主动悬挂系统可以智能地根据司机的驾驶习惯和路况变化进行调节,提供更加个性化的驾驶体验。
半主动悬挂系统的应用,可以根据不同的驾驶模式提供不同的悬挂调节效果,使驾驶员更加舒适地应对不同的路况和驾驶需求。
同时,半主动悬挂系统也可以根据车辆的载重情况和行驶速度进行智能调节,保证车辆行驶的稳定性和安全性。
总结汽车底盘悬挂系统的主动与半主动控制技术应用,为汽车的行驶稳定性和舒适性提供了更加完善的解决方案。
主动悬挂系统可以根据路况变化主动调节悬挂系统,提高了行驶的安全性;半主动悬挂系统则可以根据驾驶员的行驶习惯提供个性化的悬挂调节效果,提高了驾驶的舒适性和便利性。
随着科技的不断发展和汽车工业的进步,主动与半主动悬挂控制技术必将在未来的汽车行业中发挥着更加重要的作用。
半主动悬挂系统的研究与应用第一章研究概述半主动悬挂系统是汽车悬挂系统的一种,是许多汽车制造商近年来进行研究和应用的重点。
半主动悬挂系统是指通过以最小的能量消耗,以某种方式控制悬挂系统的运动。
因为它可以提供高性能,更快的响应速度和更好的车辆稳定性,因此比传统的被动悬挂系统更受欢迎。
目前市场上的半主动悬挂系统包括阻尼控制技术和悬挂高度控制技术。
本文将具体讨论这两种技术。
第二章阻尼控制技术阻尼控制技术是最常见的半主动悬挂系统之一。
它通过电子系统来控制悬挂系统的阻尼,以实现提高汽车行驶质量的效果。
这种系统的核心部分是阻尼控制器。
该控制器可以通过感知汽车的动态变化,包括加速和转向,来根据实时控制系统来调整阻尼力以确保高性能和舒适性的平衡。
该系统也可以提高耐久性和安全性。
例如,当汽车通过坑洼路面时,悬挂系统可以调整阻尼,以吸收或减小汽车对路面的震动,从而减少路面对车体的损坏。
第三章悬挂高度控制技术悬挂高度控制技术是另一种常见的半主动悬挂系统。
该系统允许根据驾驶条件自动调整缓解汽车的悬挂高度。
悬挂高度控制技术可以提高汽车的机动性,平顺性和可靠性。
例如,当汽车行驶在崎岖不平的公路上时,该系统可以将悬挂高度调整到最佳高度,以增加下部空间,减少汽车底部与路面的摩擦,减少对汽车底部的损坏,并提高路面行驶的舒适性。
另外,该系统还可以提高汽车的可靠性。
通过自动调整悬挂高度,可以减少车底和发动机受损的风险,特别是在低温和夜间行驶时。
第四章应用现状近年来,半主动悬挂系统的应用得到了广泛的发展。
现在,几乎所有的高端汽车品牌都提供了这两种技术的应用。
举例来说,奔驰的"Airmatic" 悬挂系统,可以自动监测路面的情况,并根据实时驾驶信息和路况以实现阻尼控制和悬挂高度控制。
这款悬挂系统还为驾驶者提供了多种驾驶模式,包括舒适,运动和特别模式,以适应不同的驾驶需求。
此外,许多汽车制造商都在不断地研究和开发新的半主动悬挂系统,以提高汽车的性能和驾驶体验。
汽车非线性半主动悬架系统时滞反馈控制宋敦科;赵艳影;邓砚宇;董成;刘永春【摘要】研究了两自由度非线性悬架系统垂向振动的时滞反馈控制.以汽车1/4车体和单个轮胎的两自由度垂向振动模型为例进行研究;其中非线性主要考虑了汽车悬架刚度的三次及五次非线性.利用多尺度法获得含时滞反馈控制的非线性半主动悬架、车体与轮胎振幅的近似解析表达式.分析时滞反馈控制对悬架系统振动的影响规律;并与不含时滞反馈控制的被动非线性模型进行比较.研究了当外激励频率等于主系统一阶共振频率;并且存在一比五内共振时,车体振动情况.重点分析时滞反馈控制的两个重要参数:时滞反馈增益系数和时滞量对车体振幅的影响;并进行相应的稳定性分析.以某型轿车参数进行数值分析研究,得出当时滞阻尼系数固定为-100 N·s/m时,车体振幅随时滞呈波浪形变化.时滞量τ取在区间[0.15,0.64]上时,车体振幅小于被动系统车体的振幅,表明时滞对系统具有减振作用;而在其他时滞区间上,车体振幅反而会比被动系统的振幅还要大.同时探讨了如何优化设计时滞阻尼系数并计算出相应的最佳时滞,使得主系统的幅度最小.%The delayed feedback control of vertical vibration is studied in a two degree of freedom vehicle semi -active suspension system.The two degree of freedom vertical vibration model of automobile 1/4 car body and single tire is studied as an example.The cubic and quantic nonlinear stiffness of vehicle suspension system are considered in the analysis.The multiple scales method is employed to obtain the approximate analytical solution of the car body and tires amplitude in the vibrating system.The effect of time delay feedback control on vibration of the semi-active suspension system is analyzed.The results of semi-active control are compared with the passivecontrol system.It is investigated when the external frequency nears the first mode frequency and vibration of a car body with one to five resonances occurs simultaneously.The focus is to analyze the effect of time delay and gain on amplitude of car body as well as the corresponding stability.The parameters of a certain type of car are analyzed by numerical analysis.It is concluded that when the damping coefficient of the car is fixed at -100 N·s/m,the amplitude of the body shows wavy change with timedelay.When the time delay τis between[0.15,0.64]the amplitude of the car body is smaller than that of the passive system,which indicates that time delay has a damping effect on the system,while on other delay intervals,it's larger.The amplitude of the car body can be suppressed to a minimum value when time delay is chosen as the optimal value by the method of optimization method.【期刊名称】《科学技术与工程》【年(卷),期】2018(018)012【总页数】8页(P305-312)【关键词】汽车;非线性;半主动悬架;时滞反馈;主动控制【作者】宋敦科;赵艳影;邓砚宇;董成;刘永春【作者单位】南昌航空大学飞行器工程学院,南昌330063;南昌航空大学飞行器工程学院,南昌330063;南昌航空大学飞行器工程学院,南昌330063;南昌航空大学飞行器工程学院,南昌330063;南昌航空大学飞行器工程学院,南昌330063【正文语种】中文【中图分类】U461.1对于传统的汽车悬架系统,为了简化分析,一般采用线性模型进行分析;但实际上几乎所有的汽车悬架系统或多或少都存在非线性特性[1—3]。

半主动悬架的工作原理
悬挂系统是汽车的重要组成部分之一,它能够对车辆的稳定性、操控性以及舒适性都有着很大的影响。
半主动悬挂(semi-active suspension)技术是目前较为先进的悬挂系统之一,它能够根据路面情况和车速实时调整悬挂刚度,提高行驶的舒适性和稳定性。
下面我们将详细介绍半主动悬挂的工作原理。
半主动悬挂在工作原理上可以分为三个部分:
1. 传感器系统
2. 控制系统
3. 操作执行器
传感器系统主要由传感器和控制单元组成,它能够实时采集车体的运动和路面的情况,并将数据发送至控制系统。
控制系统根据传感器收集到的数据,通过算法计算出适合当前路面情况的悬挂刚度和阻尼系数等参数,并将控制信号发送给操作执行器,完成悬挂系统的调整。
控制系统的主要组成部分是控制单元和执行机构。
它通过不同的控制算法实现对悬挂行程的调整,以达到较好的行驶舒适性和稳定性。
对于小幅震动,悬挂系统可根据路况信息来对悬挂进行快速调节,而对于大幅度震动甚至是跳跃,悬挂系统则会通过电磁阀和伺服电机等执行器进行反应性补偿来增强行驶的稳定性。
特别是在高速行驶、刹车和加速等紧急情况下,悬挂系统需要更快、更准确地做出反应。
操作执行器是悬挂系统的重要组成部分,它能够通过控制单元发出的控制信号来实现悬挂的动态调整。
常见的操作执行器主要有两种:电磁阀和伺服电机。
电磁阀通过调节油液的流量来调整悬挂行程,而伺服电机则通过电流的变化来调节悬挂刚度。
总的来说,半主动悬挂系统弥补了传统悬挂系统的缺陷,可以更好地适应不同的路况,提高了行驶的舒适性和稳定性,是目前较为先进的悬挂技术之一。
列车悬挂系统半主动及主动控制的现状摘要:铁道车辆的高速运行增加了列车振动幅度,这不仅会损伤车辆结构,而且振动所引发的车轮动载荷变化和加速度效应,弱化了列车运行的安全性和舒适度,同时这种状态随着行车速度的提高而显著增大。
因此,控制车辆振动是提高列车运行平稳性的核心技术。
为了确保行车安全性和提高乘坐舒适度,一方面可以通过提高线路的质量状况;另一方面则可以通过改善车辆悬挂系统的性能。
为此,设计合适的悬挂系统改善车辆的性能,对机车车辆研究具有重要意义。
结合我国铁路现状,采用半主动悬挂控制系统是我国目前高速列车悬挂系统的最佳方法。
而全主动悬挂系统用于控制算法研究,为半主动控制算法积累经验。
本文针对半主动及主动悬挂系统作详细介绍。
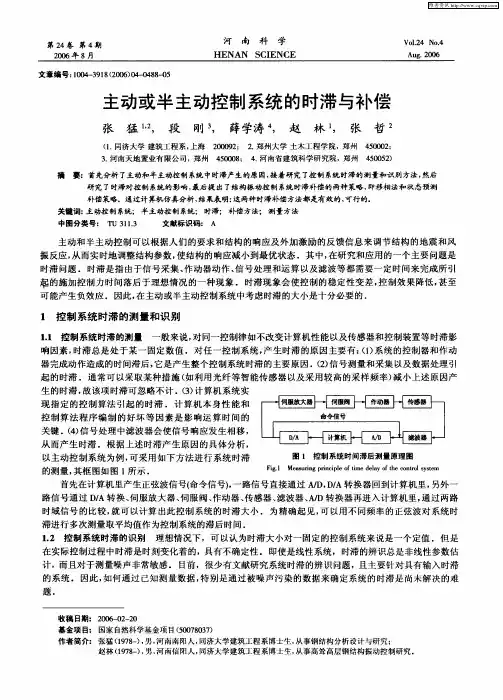
关键字:主动控制;半主动控制;轨道不平顺:广义预测控制;虚拟阻尼器1.1 列车被动悬挂分析及主动控制问题的提出行驶中的列车受到轨道不平顺的影响、空气动力的作用、牵引力和制动力等的作用,列车将做多自由度的随机振动,从而影响列车运行的稳定性(安全性)和平稳性(舒适性)。
列车悬挂系统是轮对与构架、构架与车体之间一切传递力的装置的总称,它由弹性元件和阻尼元件组成。
悬挂系统对于稳定性和平稳性的影响常常是相互矛盾的,若单从提高某方面的性能来进行悬挂系统的设计,将会造成顾此失彼。
传统列车悬挂系统的设计方案往往是综合线路质量、列车设计速度、载荷、强度等多方面的因素多目标约束下折衷优化的结果,不可能使列车各方面的性能都达到最佳状态。
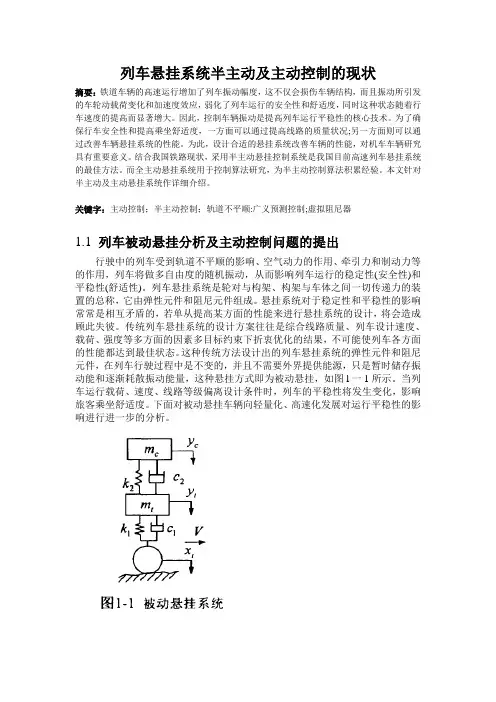
这种传统方法设计出的列车悬挂系统的弹性元件和阻尼元件,在列车行驶过程中是不变的,并且不需要外界提供能源,只是暂时储存振动能和逐渐耗散振动能量,这种悬挂方式即为被动悬挂,如图l一1所示。
当列车运行载荷、速度、线路等级偏离设计条件时,列车的平稳性将发生变化,影响旅客乘坐舒适度。
下面对被动悬挂车辆向轻量化、高速化发展对运行平稳性的影响进行进一步的分析。
1.1.1列车载荷变化或轻量化对平稳性影响设列车受轨道不平顺位移信号xi(t)的激励,构架与车体将分别产生振动位移为y1(t)与yc(t),如图l一2为图1一1所示的被动悬挂系统方框图。
汽车半主动悬架控制策略研究引言随着车辆性能和安全要求的不断提高,汽车悬架系统的控制策略成为了研究的焦点之一、半主动悬架系统是一种利用电控阻尼机构来调整悬架刚度和阻尼的悬架系统,在提高车辆操控性能的同时也能提高乘坐舒适度。
本文将对半主动悬架系统的控制策略进行详细阐述和研究。
一、半主动悬架系统概述半主动悬架系统是一种通过调整悬架系统的刚度和阻尼来适应不同驾驶条件的悬架系统。
相比于传统的被动悬架系统,半主动悬架系统具有更高的悬架效率和更好的车辆操控性能。
半主动悬架系统通常由电液或电磁调节阻尼器、传感器和控制器组成。
二、半主动悬架系统的控制策略半主动悬架系统的控制策略主要包括基于前馈控制和反馈控制的方法。
1.前馈控制前馈控制是通过预先规划的动作来控制悬架系统的刚度和阻尼。
前馈控制可以根据车辆的加速度、刹车、转向等信号提前调整悬架系统的刚度和阻尼,以提高车辆的操控性能和乘坐舒适度。
例如,在车辆急刹车时,可以通过增加悬架系统的刚度和阻尼来提高制动效果和稳定性。
2.反馈控制反馈控制是根据实时的车辆状态和环境信息来调整悬架系统的刚度和阻尼。
反馈控制通常采用模糊控制、PID控制或基于模型的控制方法。
这些方法可以通过将车辆的状态与期望的状态进行比较来实现悬架系统的调整。
例如,在车辆通过不平路面时,反馈控制可以根据车辆的垂直加速度和悬架行程来调整悬架的刚度和阻尼,以提高乘坐舒适度。
三、半主动悬架系统的优势与应用半主动悬架系统相比于传统的被动悬架系统具有以下优势:1.提高悬架效率:半主动悬架系统可以根据实时的驾驶条件和车辆状态来调整悬架的刚度和阻尼,以提供最佳的悬架效果。
2.改善车辆操控性能:半主动悬架系统可以根据不同驾驶需求提供不同的悬架刚度和阻尼,以提高车辆的操控性能和稳定性。
3.提高乘坐舒适度:半主动悬架系统可以根据路面状况和车辆状态调整悬架的刚度和阻尼,以提供更好的乘坐舒适度。
半主动悬架系统广泛应用于高档轿车、SUV和跑车等车型。
具有时滞补偿的汽车半主动悬架最优控制方法
孙益民;李仲兴;王国林
【期刊名称】《农机化研究》
【年(卷),期】2004(000)006
【摘要】基于两自由度半主动悬架系统模型,通过在最优控制器的执行机构上添加一个一阶微分环节,实现了对控制输入预测控制,补偿了控制系统响应的滞后.仿真结果表明,该控制方法可有效提高车辆行驶安全性和乘坐舒适性.
【总页数】3页(P152-154)
【作者】孙益民;李仲兴;王国林
【作者单位】江苏大学,汽车与交通工程学院,江苏,镇江,212013;江苏大学,汽车与交通工程学院,江苏,镇江,212013;江苏大学,汽车与交通工程学院,江苏,镇江,212013【正文语种】中文
【中图分类】TP391.9
【相关文献】
1.磁流变半主动悬架的史密斯预估-LQG时滞补偿控制方法 [J], 王健;祖广浩
2.磁流变半主动悬架的泰勒级数-LQG时滞补偿控制方法 [J], 陈士安;祖广浩;姚明;张晓娜
3.磁流变半主动悬架的史密斯预估-LQG时滞补偿控制方法 [J], 王健;祖广浩
4.EHA半主动悬架自适应Smith预估时变时滞补偿控制 [J], 寇发荣;李冬;许家楠;方涛
5.电磁阀式半主动悬架LQG-Smith时滞补偿控制研究 [J], 范二军;寇发荣;李冬;田蕾;陈晨
因版权原因,仅展示原文概要,查看原文内容请购买。
汽车半主动悬架系统的控制内容
汽车半主动悬架系统的控制内容包括以下几个方面:
1. 实时监测:悬架系统通过传感器实时监测车辆的动态信息,包括车速、转向角度、加速度、制动力等。
这些数据可以帮助系统判断当前行驶状态和路面状况。
2. 路面感知:悬架系统通过传感器感知路面状况,如颠簸、凹凸不平等情况,并将这些信息传递给控制单元。
3. 控制算法:悬架系统根据实时监测的数据和路面感知信息,通过控制算法计算最佳的悬架调节策略。
这个算法可以根据不同的行驶情况和路况动态调整,以提供最佳的悬架调节效果。
4. 悬架调节:悬架系统通过控制电磁阀、阻尼器或空气弹簧等调节装置,实现对悬架硬度、阻尼力等参数的调节。
根据控制算法计算的结果,系统可以动态调整悬架的工作状态,以提供更好的悬架控制性能。
5. 悬架模式选择:半主动悬架系统通常具有不同的工作模式,如舒适模式、运动模式等。
用户可以根据自己的需求选择合适的模式,控制系统会根据选择的模式来调节悬架的工作状态。
总的来说,汽车半主动悬架系统的控制内容主要包括实时监测车辆和路面信息、路面感知、控制算法、悬架调节和悬架模式选择等方面,以提供更好的悬架控制性能和乘坐舒适性。
考虑控制时滞的主动悬架离散系统最优控制
高小林;曹青松
【期刊名称】《噪声与振动控制》
【年(卷),期】2018(038)0z1
【摘要】主动悬架实质上是一个含有时滞的离散控制系统.针对1/4汽车主动悬架系统模型,考虑到时滞量未必是采样周期的整数倍,采用时滞量一般性描述模型.对含时滞主动悬架连续系统进行离散化,将作动器输入转化成部分状态变量,扩展系统状态变量,建立含时滞主动悬架离散系统扩展状态空间模型.选取悬架动行程、车轮动载荷、垂向加速度及作动器能耗作为优化目标,设计了主动悬架离散系统最优控制器.最后,采用MATLAB/SIMULINK软件建立实例仿真模型,分析含时滞主动悬架离散控制系统对随机白噪声路面与阶跃输入的响应特性,结果表明采用最优控制的主动悬架系统响应速度快、控制效果好,时滞量对主动悬架离散系统具有明显的影响,且影响程度与采样周期有关.
【总页数】4页(P326-329)
【作者】高小林;曹青松
【作者单位】江西科技学院协同创新中心,南昌 330098;江西科技学院协同创新中心,南昌 330098
【正文语种】中文
【中图分类】U461.4
【相关文献】
1.含有状态时滞的受扰线性离散系统前馈-反馈最优控制 [J], 赵艳东;刘尚麟
2.具有时滞补偿的汽车半主动悬架最优控制方法 [J], 孙益民;李仲兴;王国林
3.考虑控制时滞的车辆主动悬架随机预瞄控制 [J], 宋刚;许长城
4.基于遗传算法的含时滞主动悬架离散系统最优控制 [J], 高小林;曹青松;许力
5.考虑多种非线性因素的主动悬架系统最优控制 [J], 易星;曹青松
因版权原因,仅展示原文概要,查看原文内容请购买。