第18章 电子控制悬架系统
- 格式:ppt
- 大小:1.98 MB
- 文档页数:71

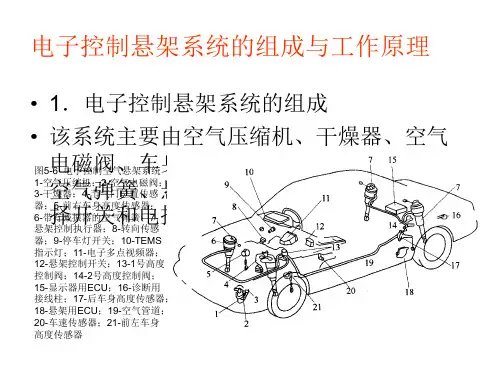
汽车电子悬架控制系统5.1 电子悬架控制系统5.1.1 系统介绍(1)电子悬架控制系统(ESC)由以下部件组成:●ESC模块●四只减震器●四只位置传感器●ALC空气压缩机模块●ELC继电器带有ALC功能的ESC系统,可以在不同的路面及驾驶条件下控制减震器的硬度。
ALC只用来调整车辆后部处于一个正确的水平高度。
(2)ESC模块ESC模块接受以下信息:●车轮与车身的相对位置●车速信号●俯/仰角度信号通过这些信息,ESC来控制每一个减震器的软硬程度,以达到最佳的悬挂效果。
ESC模块也控制车辆后部的高度,模块安装在右后座后部。
(3)位置传感器四个位置传感器测量车轮与车身之间的相对位置,输出0-5V的输出信号。
(4)减震器四个减震器内各有一个执行器,分别的受ESC控制,可以在一个广泛的范围内控制减震器的软硬度。
通过PWM信号可以控制流经减震器的电流大小。
减震器是单管型的,ESC通过控制磁通量来磁化内部的粒子。
在压缩及恢复的两个方向上,这种控制是多模式的,而且是多级的。
(5)车速信号ESC从Class 2数据总线上获取车速信号,来控制减震器的应用模式。
1.6 俯/仰角度信号ESC 从PCM接收到一个实际的俯/仰信号后,会控制四个减震器的减震硬度。
PCM根据节气门、变速器档位、车速和刹车开关信号计算仰角信号,根据车速的变化率计算俯角信号。
1.7 警告信息如果ESC系统出现故障,DIC会显示两种信息:●SERVICE SUSPENSION SYS●SPEED LIMITED TO XXX这会在DIC上一直显示,直到故障被修复。
5.1.2 电子悬架控制系统原理在不采用机电阀和小型移动部件的情况下,MagneRide首次在行业内推出了半活动悬架技术。
半活动悬架系统的基础为MagneRide磁性液流(Magneto-Rheological)(MR)油液,该系统由充加MR油液的单管支柱、单管减震器、传感器组件及车载控制器等构成。


电控悬架的工作原理
电控悬架系统是一种应用于汽车底盘的先进技术,其工作原理主要通过电子控制单元(ECU)、传感器和执行器之间的协同工作实现。
首先,ECU负责监测传感器提供的车辆状态信息,例如车速、车身姿态、悬架行程等。
传感器通常包括加速度计、角度传感器、压力传感器等多种类型,用于实时检测车辆运动状态。
ECU通过分析传感器数据,根据预设的悬架调节策略来决定
如何调整每个悬架的行程和刚度。
这些策略可以根据驾驶模式、路况、车速等因素进行自动调整,以提供最佳的悬架调节效果。
接下来,ECU将调整命令传送给执行器,执行器通常采用液
压驱动或电动控制。
液压驱动系统通过控制阀门和液压缸来实现对悬架行程的调节。
电动控制系统则通过电机和齿轮机构来执行相应的调整。
最后,执行器根据ECU发送的调整命令,实时调节悬架行程
和刚度。
这一过程是连续的,以使得悬架能够根据实时道路状况和车辆状态进行精确控制,以提供更好的悬架动力学性能和乘坐舒适性。
总的来说,电控悬架系统通过电子控制单元、传感器和执行器的协同工作,实现对悬架行程和刚度的实时调整,以提供更好的悬架调节效果和乘坐舒适性。
电控悬架工作原理
电控悬架是一种利用电子控制系统来调节车辆悬架的工作原理。
它通过感应车辆的运动状态和外部环境,并根据预设的参数和算法进行实时计算和控制,以实现对悬架的主动调节和控制。
电控悬架的工作原理可以分为以下几个步骤:
1. 感应:电控悬架通过车身加速度传感器、倾斜传感器、液压传感器、路面感应器等,感知车辆的运动状态和外部环境,包括车身姿态、车速、路面状况等参数。
2. 计算:电控悬架通过电子控制单元(ECU)进行实时计算和控制。
ECU根据预设的参数和算法,结合感知到的车辆运动
状态和外部环境信息,对悬架系统进行调节和控制。
3. 调节:根据计算结果,电控悬架通过电动伺服执行器控制液压系统或气压系统,调节悬架的工作状态,包括悬挂高度、硬度和阻尼等参数。
通过改变悬架的工作状态,电控悬架可以实现对车身姿态的调整,提高车辆的平顺性、稳定性和操控性。
4. 反馈:电控悬架系统将调节后的工作状态,利用传感器对调节效果进行实时监测和反馈。
如果调节效果不理想,系统会进行自动调整,直到达到预设的目标。
总的来说,电控悬架通过感应车辆运动状态和外部环境,通过电子控制系统进行实时计算和控制,调节悬架的工作状态,以提升车辆的悬挂系统性能,提高驾乘舒适性和行驶稳定性。
电子行业电子控制悬架系统引言在电子行业中,电子控制悬架系统(Electronic Control Suspension System)已经成为一个非常重要的技术。
随着汽车电子化的发展,悬架系统的电子控制能力逐渐得到提升,进一步提高了汽车的操控性能和乘坐舒适度。
本文将介绍电子控制悬架系统的原理、功能以及在电子行业中的应用。
电子控制悬架系统的原理电子控制悬架系统主要由传感器、控制单元和执行器组成。
传感器负责感知车身各种状态参数,如悬架行程、车速、加速度等;控制单元根据传感器的反馈信号,进行数据处理和控制策略的制定;执行器根据控制单元的指令,调节悬架系统的工作状态,以实现车身的平稳和操控性能的提升。
电子控制悬架系统采用了先进的电子控制技术和实时反馈控制方法,能够根据不同的驾驶环境和道路状态,自动调节悬架的刚度和行程,实现较好的悬挂效果。
通过悬架的主动调节,车身可以保持平稳的姿态,减少颠簸、侧倾和横摆等不良驾驶状态对车辆行驶的影响。
电子控制悬架系统的功能电子控制悬架系统具有以下几个重要的功能:主动悬架调节电子控制悬架系统可以根据驾驶环境和车速的变化,自动调节悬架的刚度和行程,使车身保持平稳的姿态。
车身的平稳可以提高驾驶的舒适性和稳定性,同时也可以减少对车辆其他部件的磨损和损坏。
动态悬架控制电子控制悬架系统可以根据车辆的动态状态,动态调整悬架的工作参数,以实现最佳的悬挂效果。
例如在高速行驶时,可以增加悬架的刚度,提高车身的稳定性;而在低速行驶或通过减速带时,可以减小悬架的刚度,提高车身的舒适性。
高度调节控制电子控制悬架系统还可以根据实际需要,对车身的高度进行调节。
这样,驾驶员可以根据不同的道路条件和驾驶需求,自由调节车身的高度,以适应不同的行驶环境。
自适应调节电子控制悬架系统可以根据驾驶员的驾驶习惯和偏好,自适应地调节悬架的参数。
通过学习驾驶员的驾驶行为和反馈信息,系统可以逐渐了解驾驶员的习惯,从而提供个性化的悬架调节策略。