第三章2雷达图像特征
- 格式:ppt
- 大小:934.00 KB
- 文档页数:22
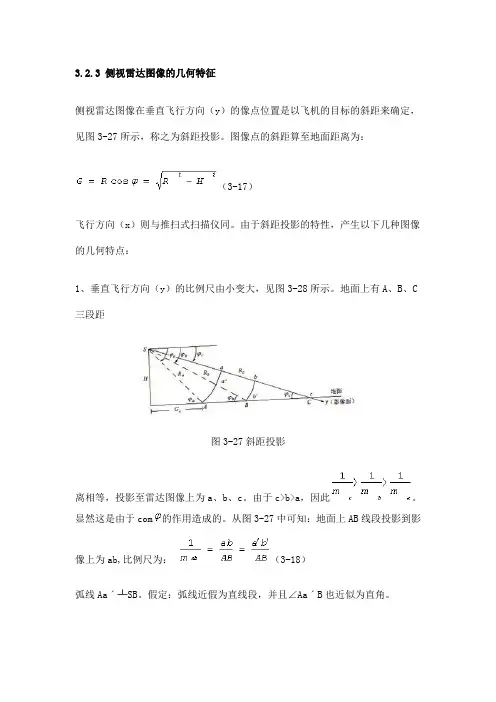
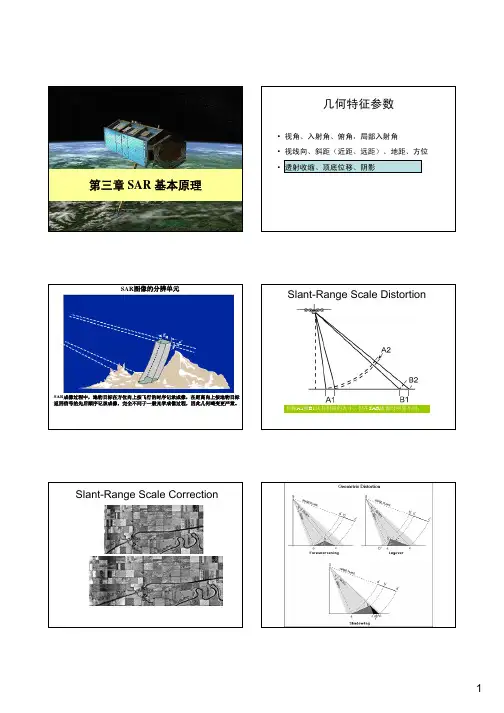
3.2.3 侧视雷达图像的几何特征侧视雷达图像在垂直飞行方向(y)的像点位置是以飞机的目标的斜距来确定,见图3-27所示,称之为斜距投影。
图像点的斜距算至地面距离为:(3-17)飞行方向(x)则与推扫式扫描仪同。
由于斜距投影的特性,产生以下几种图像的几何特点:1、垂直飞行方向(y)的比例尺由小变大,见图3-28所示。
地面上有A、B、C 三段距图3-27斜距投影离相等,投影至雷达图像上为a、b、c。
由于c>b>a,因此。
显然这是由于com的作用造成的。
从图3-27中可知:地面上AB线段投影到影像上为ab,比例尺为:(3-18)弧线Aaˊ┴SB。
假定:弧线近假为直线段,并且∠AaˊB也近似为直角。
则变成通式(3-19)考虑到实测的斜距是按比例尺缩小为影像,因此在侧视方向上的比例尺为:(3-20)可见,°,cos,即趋于0°时比例尺大,而°,cos,即趋于90°时比例尺小。
2、山体前倾,朝向传感器的山坡影像被压缩,而背向传感器的山坡被拉长,与中心投影相反,还会出现不同地物点重影现象。
如图3-29所示,地物点AC之间的山坡在雷达图3-28 侧视雷达影像的比例尺图像上被压缩,在中心投影像片上是拉伸,CD之间的山坡出现的现象正好相反。
地物点A和B在雷达图像上出现重影,在中心投影像片中不会出现这种现象。
图3-29重影现象3、高差产生的投影差亦与中心投影影像投影差位移的方向相反,位移量也不同。
见图3-30所示。
投影差(3-21)而(3-22)图3-30投影差由于所以取(3-23)当△h>0时,也大于0为正值,反之为负值。
投影差改正时用加法:。
Microwave radar imaging and advanced concepts雷达成像原理第一章雷达基础知识 (5)1.1雷达的定义 (5)1.2雷达简史 (5)1.3电磁波 (6)1.4脉冲 (9)1.5分贝值表示方法 (9)1.6天线 (10)1 .7雷达散射截面 (12)2.1傅立叶变换 (14)2.2雷达硬件组成 (15)2.2.1振荡器 (15)2.2.2波形产生 (16)2.2.3混频器 (16)2.2.4调制 (16)2.2.5发射机 (16)2.2.6波导 (17)2.2.7双工器 (17)2.2.8天线 (17)2.2.9限幅器 (18)2.2.10低噪放大器 (18)2.2.11系统噪声 (18)2.2.12解调 (19)2.2.13正交混频 (20)2.2.14 A/D转换器 (21)2.3天线 (23)2.3.1天线的概述 (23)2.3.2方向性函数 (24)2.3.3天线增益 (27)2.3.4天线口面上辐射场的渐变处理 (28)2.3.5余割平方天线 (29)2.4相控阵天线 (30)2.4.1一维线阵列天线 (31)2.4.2二维相控阵 (33)第三章外部环境对雷达系统的干扰 (34)3.1雷达散射截面(RCS) (34)3.1.1简单目标的RCS (35)3.1.1.1理想导体球 (35)3.1.1.2平板 (36)3.1.1.3角反射器 (36)3.1.1.4 Luneburg透镜 (37)3.1.2 复杂目标的RCS (38)3.1.3计算RCS的方法 (38)3.1.4极化因素 (38)3.1.4.1 极化散射矩阵 (39)3.1.4.2简单目标的极化散射矩阵 (39)3.1.4.3 更一般的极化基 (40)3.2 传播与杂波 (41)3.2.1 雷达波在大气中的折射 (42)3.2.2 地表弯曲效应 (42)3.2.3雷达波在空气中的衰减 (43)3.2.4雷达波在雨水中的衰减 (43)3.2.5雷达波在地表的反射 (44)3.2.6 多路效应 (44)3.2.7 表面杂波反射 (45)3.2.8 降水引起的雷达反向散射 (46)3.3 外部噪音 (47)第四章:基本雷达信号处理 (50)4.1 从噪声和杂波中间测回波信号 (50)4.1.1检测器特点 (50)4.1.2检测的基本理论 (50)4.1.3噪声中检测无波动目标 (52)4.1.3.1:已知相位的单脉冲的相参检测 (52)4.1.3.2单脉冲包络检测 (52)4.1.3.3 n个脉冲的相参积分: (53)4.1.3.4 n个非相参脉冲的积分变换损失: (53)4.1.4 施威林情形 (53)4.1.4.2 波动损失 (54)4.1.5:噪声中目标检测小结: (54)4.1.6:次积分:无振动目标 (54)4.1.7目标 (55)4.2 雷达波形 (55)4.2.1总的雷达信号 (55)4.2.2 匹配滤波器 (56)4.2.3:匹配滤波器对于延迟,多谱勒平移、信号的响应, (58)4.2.4 雷达模糊函数 (59)4.2.5 例1:一个单脉冲;距离和速度分辨率 (60)4.2.6 例2:线性频率调制脉冲;脉冲压缩 (61)4.2.7 例3:相关脉冲序列:在距离和速度上的分辨率和模糊度 (62)4.2.7.1 单脉冲串 (63)4.2.7.2 线性调频脉冲串 (64)4.2.7.3其它脉冲序列 (65)4.2.8 相差处理间隔 (66)4.2.9 CPI的例子,求解雷达方程 (66)4.3 雷达测量精确度 (67)4.3.1单脉冲 (67)4.3.2 卡尔曼绕界限 (67)4.3.2.1在频率上得卡尔曼-绕界限 (68)4.3.2.2延迟上的卡尔曼绕界限 (69)4.3.2.3角度上的卡尔曼--绕界限 (69)4.3.2.4卡尔曼-绕界限的例子。



第三章第五节探地雷达技术ppt 课件•探地雷达技术概述•探地雷达系统组成•探地雷达数据处理与解释•探地雷达在不同领域中的应用实例目•探地雷达技术发展趋势与挑战•总结回顾与拓展思考录探地雷达技术概述01CATALOGUE定义与发展历程定义探地雷达(Ground Penetrating Radar,GPR)是一种利用高频电磁波在地下介质中传播并反射回来的特性,对地下目标体进行探测和成像的无损检测技术。
发展历程自20世纪70年代初期,探地雷达开始被应用于地质勘探、考古、环境工程等领域。
随着计算机技术和信号处理技术的不断发展,探地雷达的分辨率和探测深度不断提高,应用领域也不断扩展。
原理及工作方式原理探地雷达通过发射高频电磁波,当电磁波遇到不同电性的地下介质界面时,会发生反射和折射。
接收天线接收反射回来的电磁波信号,并通过信号处理技术对信号进行处理和成像,从而得到地下目标体的位置和形态信息。
工作方式探地雷达可以采用不同的工作频率、天线类型和扫描方式等参数设置,以适应不同的探测需求和地下环境。
常见的工作方式包括剖面扫描、三维成像、实时监测等。
应用领域与意义应用领域探地雷达广泛应用于地质勘探、考古、环境工程、建筑工程、军事等领域。
例如,在地质勘探中,可以用于探测矿藏、油气藏等;在考古中,可以用于探测古墓、遗址等;在环境工程中,可以用于探测污染物分布、土壤层结构等。
意义探地雷达作为一种无损检测技术,具有非破坏性、高分辨率、高效率等优点。
它可以提供丰富的地下信息,为相关领域的研究和决策提供有力支持。
同时,随着技术的不断发展,探地雷达的应用前景将更加广阔。
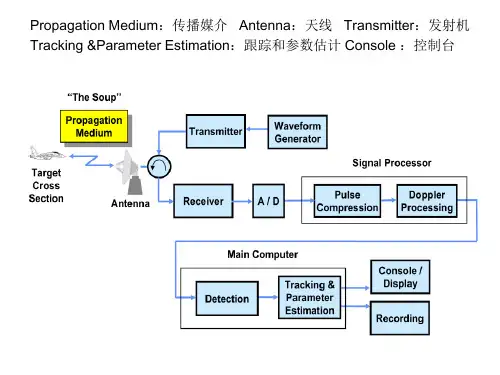
探地雷达系统组成02CATALOGUE发射机与接收机设计发射机产生高频电磁波,通常采用脉冲体制或连续波体制。
脉冲体制具有高峰值功率、宽频带等特点,适用于浅层高分辨率探测;连续波体制则具有低功耗、易于实现等优点,适用于深层探测。
接收机接收来自地下的反射信号,并进行放大、滤波等处理。
雷达图像特征提取与分析技术研究随着雷达技术的不断发展和应用领域的扩大,雷达图像特征提取与分析技术变得越来越重要。
雷达图像特征提取与分析技术是指从雷达图像中提取有用的特征信息,并对这些特征进行分析和研究,以实现对目标的检测、识别和分类。
本文将探讨雷达图像特征提取与分析技术的研究进展,并介绍其中一些常用的方法和算法。
一、雷达图像特征提取技术的研究进展雷达图像特征提取技术的研究主要包括基于像素的特征提取和基于目标的特征提取。
基于像素的特征提取方法主要通过对雷达图像的像素级别处理,提取图像的纹理、边缘等特征信息。
而基于目标的特征提取方法则是通过对目标的形状、大小、位置等特征进行提取和分析。
在基于像素的特征提取方法中,常用的方法有纹理特征提取、边缘检测和角点检测等。
纹理特征提取可以通过计算图像的灰度共生矩阵、局部二值模式和小波变换等方法来描述图像的纹理信息。
边缘检测是用来寻找图像中不同区域之间的边界线,常用的方法有Canny算法、Sobel算法和拉普拉斯算子等。
角点检测则是为了找到图像中的角点,从而能够更好地描述图像的形状。
常用的角点检测方法有Harris角点检测算法和SIFT算法等。
而在基于目标的特征提取方法中,常用的方法有形状特征提取、尺度不变特征变换和颜色特征提取等。
形状特征提取是通过提取目标的形状信息来描述目标,常用的方法有轮廓提取、椭圆拟合和Hu矩等。
尺度不变特征变换则是为了实现目标的尺度不变性,在不同尺度下提取目标的特征。
常用的方法有尺度不变特征变换(SIFT)算法和速度不变特征变换(SURF)算法等。
颜色特征提取是通过提取目标的颜色信息来描述目标,常用的方法有颜色直方图和颜色矩等。
二、雷达图像特征分析技术的研究进展雷达图像特征分析技术是指对提取到的特征进行分析和研究,以实现对目标的检测、识别和分类。
雷达图像特征分析技术主要包括基于统计学的方法和基于机器学习的方法。
基于统计学的方法主要采用统计学原理和方法进行特征分析。
雷达遥感图像的特征提取和分类技术研究随着遥感技术的发展和进步,雷达遥感图像在许多领域中被广泛应用,比如军事、气象、地震、测绘、环境监测等。
而图像特征提取和分类是雷达遥感图像处理的重要环节。
本文将探讨雷达遥感图像的特征提取和分类技术研究。
一、雷达遥感图像的特征提取特征提取是图像分析的首要步骤,也是图像分类、识别和检索等应用的基础。
雷达遥感图像的特征提取可以从多角度入手,以下是其中几种比较常见的方法:1. 基于纹理特征的提取纹理是指物体表面的一些规则和不规则的花纹,多次反射和散射的雷达波在物体表面产生一定的能量分布形态,也就是反射面的纹理信息。
常用的纹理特征包括灰度共生矩阵(GLCM)、灰度差分直方图(GDH)和灰度依赖矩阵(GDKM)等。
2. 基于形状特征的提取形状是物体识别和定位的重要特征,包括几何形状、边界和轮廓等。
这些特征可以通过边缘检测、二值化、分割等方法获取。
基于形状特征的分类方法常采用支持向量机(SVM)、神经网络等分类器。
3. 基于频谱特征的提取雷达遥感图像是一类典型的信号图像,具有一定的频域特性,重要的特征之一是频谱特征,即频域内的幅度和相位信息。
频谱特征的提取一般采用傅立叶变换(Fourier transform)、小波变换等方法。
二、雷达遥感图像的分类技术图像分类是指将图像划分为有限数量的类别,是图像处理的重要应用之一。
雷达遥感图像分类的目的是对图像进行自动分类识别,以达到正确的飞行目标、地貌类型、海洋情况等的判断。
市面上常用的分类方法包括:1. 经验模式分解(EMD)分类法该方法将雷达遥感图像分解为若干细节层和一层余数层,然后对每一层进行特征提取和分类,最后将每一层的分类结果进行融合,得到最终的分类结果。
EMD 分类法具有良好的适应性和泛化性能。
2. 模糊聚类法模糊聚类是一种经典的无监督分类方法,相比于传统的硬聚类,模糊聚类可以将一个样本同时分配到多个类别中,以更准确地描述样本的特征。