【CN109856638A】一种特定水下目标自动搜索定位的方法【专利】
- 格式:pdf
- 大小:548.91 KB
- 文档页数:14
![一种海上目标自动识别方法[发明专利]](https://uimg.taocdn.com/158c9d09aeaad1f347933f42.webp)
专利名称:一种海上目标自动识别方法
专利类型:发明专利
发明人:郭伟清,谢云云,黄详淇,刘琳,谷志强,李德正,杨正婷,殷明慧,卜京,张俊芳,姚娟,邹云
申请号:CN201910675710.7
申请日:20190725
公开号:CN112307805A
公开日:
20210202
专利内容由知识产权出版社提供
摘要:本发明公开了一种海上目标自动识别方法。
方法步骤为:首先对海上目标信号数据进行滤波处理;然后识别海上目标的运动轨迹;接着根据获取的各信号源数据,在信号源数据库中匹配信号源名称;最后识别同一轨迹上的信号源并匹配对应名称,根据信号源名称匹配对应船只。
本发明根据各个传感器采集的海上目标信号源数据,实现海上目标自动识别方法,完成海上目标自动识别并匹配到具体的船只,并对识别和匹配结果进行了可信度分析,具有识别速度快、结果可信度高、流程简单、便于应用的优点。
申请人:南京理工大学
地址:210094 江苏省南京市玄武区孝陵卫200号
国籍:CN
代理机构:南京理工大学专利中心
代理人:薛云燕
更多信息请下载全文后查看。
![一种水下搜索定位探测装置[实用新型专利]](https://uimg.taocdn.com/1519417adaef5ef7bb0d3cd6.webp)
专利名称:一种水下搜索定位探测装置
专利类型:实用新型专利
发明人:单宇翥,陈洋,张国辉,陈烨,井倩倩,王见领,葛磊申请号:CN201620195166.8
申请日:20160315
公开号:CN205427187U
公开日:
20160803
专利内容由知识产权出版社提供
摘要:本实用新型属于水下探测技术领域,涉及一种水下搜索定位的探测装置,显示屏通过电缆分别与换能器和电子罗盘电信息连接,用于显示路径值和角度值,换能器和电子罗盘通过可旋转调节结构的支架安装在底盘上,支架上设有位置锁定装置用于辅助角度测量;换能器发射单波束超声波至大于1公里范围并接收经待测结构物或测点反射回来的超声波,通过计算超声波的传播时间和传播速度得出待测结构物或测点的距离;通过直接读取电子罗盘上的角度数得出待测结构物或测点的角度;该装置结构简单,移动方便,测定效果好,测定效率高,使用环境友好。
申请人:青岛太平洋海洋工程有限公司
地址:266110 山东省青岛市李沧区九水东路320号-15
国籍:CN
代理机构:青岛高晓专利事务所
更多信息请下载全文后查看。
![一种可自动定位的水下探测仪[发明专利]](https://uimg.taocdn.com/3c203c9601f69e314232940a.webp)
专利名称:一种可自动定位的水下探测仪专利类型:发明专利
发明人:王金霞,高泽旭
申请号:CN201910006440.0
申请日:20190104
公开号:CN109533242A
公开日:
20190329
专利内容由知识产权出版社提供
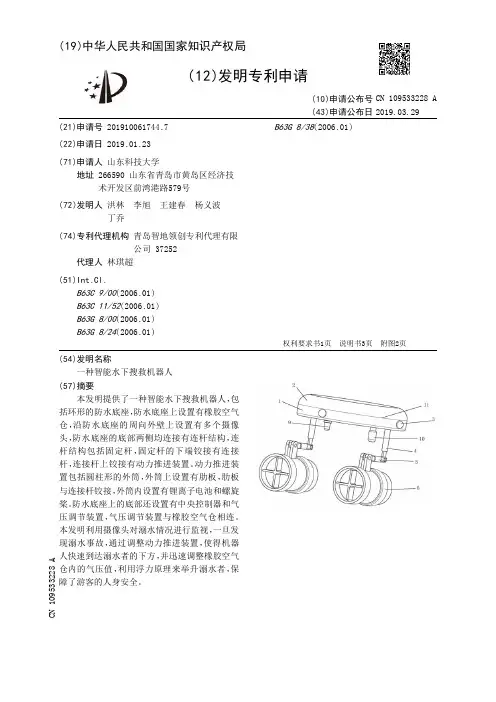
摘要:本发明公开一种可自动定位的水下探测仪,包括基架、侧板、顶板、云台摄像机、驱动装置、折叠装置、定位装置、底板,驱动装置固定安装在基架的两边,云台摄像机固定安装在顶板上,折叠装置固定安装在底板的底部,两个定位装置固定安装在折叠装置的左右两边;本发明通过驱动装置使机器人行进和调整行进角度,通过折叠装置调整机器人的定位角度和位置,通过定位装置实现牢固定位,增强了机器人在水下探测时的稳定性,提高了探测效果。
申请人:王金霞
地址:432799 湖北省武汉市洪山区珞狮路122号
国籍:CN
更多信息请下载全文后查看。
(19)中华人民共和国国家知识产权局
(12)发明专利申请
(10)申请公布号 (43)申请公布日 (21)申请号 201910148370.2
(22)申请日 2019.02.28
(71)申请人 中国计量大学
地址 310018 浙江省杭州市江干区下沙高
教园区学源街258号中国计量大学
(72)发明人 严永强 金怀洲 金尚忠 徐睿
石岩 赵天琦 袁骁霖 周亚东
赵春柳
(51)Int.Cl.
G01S 15/02(2006.01)
G01S 15/89(2006.01)
G06K 9/00(2006.01)
G06K 9/32(2006.01)
G06T 7/70(2017.01)
(54)发明名称
一种特定水下目标自动搜索定位的方法
(57)摘要
本发明公开了一种特定水下目标自动搜索
定位的方法,通过将自主水下潜航器AUV作为可
移动的声纳信号接收换能器阵列,使得水底声纳
图像采集更加便捷高效全面,采用EKF -SLAM算法
和芯片级原子钟CSAC提高自主水下潜航器的定
位精度,应用机器学习形成特定水下目标的光学
和声学图像数据特征集,在自主水下潜航器AUV
进行特征识别后对可能的目标数据回传母船进
行人为二次判别,
大大提高了目标搜索的效率。
权利要求书2页 说明书8页 附图3页CN 109856638 A 2019.06.07
C N 109856638
A
权 利 要 求 书1/2页CN 109856638 A
1.一种特定水下目标自动搜索定位的方法,该方法包括:
S0:特定水下目标自动搜索定位系统构成包括母船、浮标和自主水下潜航器AUV;
S1:获取特定水下目标的光学和声学图像特征数据集,并存储于自主水下潜航器AUV 中;
S2:目标水下区域的海底声纳图像的获取;
S3:对所述海底声纳图像进行分析,选定特定水下目标潜在区域;
S4:将母船,浮标和自主水下潜航器AUV进行时钟同步,投放自主水下潜航器AUV对所述特定水下目标潜在区域按照程序规划路线进行自主搜索;
S5:对AUV回传的数据信息进行分析,判别后确定特定水下目标位置。
2.根据权利要求1所述的一种特定水下目标自动搜索定位的方法,其特征在于:所述的浮标的功能模块包括:
水下通信模块,包括发射换能器,接收换能器,声波调制解调器;
水上通信模块,用于浮标之间信号中转或浮标与母船之间的通讯;
GPS模块,用于浮标的准确定位;
芯片级原子钟CSAC时钟,由芯片原子钟集成,用于时钟同步和提高自主水下潜航器AUV 的定位精度;
能源模块:包括太阳能电池板、蓄电池和可拆卸的与母船相连接的供电电缆。
3.根据权利要求1所述的一种特定水下目标自动搜索定位的方法,其特征在于:所述的自主水下潜航器AUV功能模块包括
水下通信模块,包括发射换能器,接收换能器,声波调制解调器;
水上通信模块,用于自主水下潜航器AUV之间信号中转或自主水下潜航器AUV与母船或浮标之间的通讯;
GPS模块,用于自主水下潜航器AUV的准确定位;
芯片级原子钟CSAC时钟,由芯片原子钟集成,用于时钟同步和提高自主水下潜航器AUV 的定位精度;
惯性成像模块,包括多普勒速度仪DVL,光纤陀螺仪FOG,深度计,用于测量自主水下潜航器AUV各项运动参数,提高自主水下潜航器AUV的定位精度;
光学成像模块,包括高清水下摄像机,用于采集图像后用于目标特征判别和回传母船人为二次判定;
声学成像模块,包括主动前视成像声纳,用于形成水下目标物的声纳图像进行目标特征判别和自主水下潜航器AUV定位。
4.根据权利要求1所述的一种特定水下目标自动搜索定位的方法,其特征在于:S1所述的特定水下目标的光学和声学图像特征数据集的获取,具体方法为,在模拟环境下采集特定水下目标的光学和声学数据,通过机器学习神经网络训练形成特征数据集,或者采用已有的相似的特征数据集。
5.根据权利要求1所述的一种特定水下目标自动搜索定位的方法,其特征在于:S2所述的目标水下区域的水下声纳图像的获取,具体方法为:装有大功率声纳设备的母船向水下发射调制声纳信号,自主水下潜航器AUV作为可移动的换能器阵列,对反射的声波信号进行分布式采集,经过数据处理后形成声纳图像。
2。