水下导航定位系统在水下作业中的应用
- 格式:doc
- 大小:25.00 KB
- 文档页数:3
G PS在水下地形测量中的应用探讨董杰顾斌(中国矿业大学环境与测绘学院,江苏徐州221l16)应用科技哺要】本文阐述了G PS—RTK技术在水下地形测量宁的应用。
随着G P S毒f术的发展,水下地形测量采用G PS荻得平面坐标,回声测深钗获得深度的基本模式。
保证了水下地形测量的准确性和实时性。
从而使得水下测量变得快速精确方便。
巨键词水下地形测量;G PS-R T K;回声探测仪;应用探讨在水利工程中,水下地形测绘具有重要的意义。
传统的水下地形测量方法主要采用全站仪结合测深仪进行测量。
即在岸上架设全站仪,测量目啉的及时点位坐标,在船体上测量水深。
这种方法由于地球曲率、通视及测站条件的限制难以满足需要,目精麈f医,并同时要进行水位测量。
随着G P S技术的发展,G PS技术在水卞地形测量中的应用越来越广泛。
如G PS差分技术就是利用一台G P S接收机固定在已知的基准点上。
其他的接收机置于船体上作为流动站,同时观测卫星。
这种方法不仅提高了精度,而且加快了作业速度全天候作业。
1G PS-R T K的工作原理1.1原理G P S全球定位系统定位的基本原理是根据高速运动的卫星瞬间位置作为已知点的起算数据,采用空间距离后方交会的方法来确定待测点的位置。
常规的G P S测量方法,如静态、快速静态、动态测量都需要事后进行解算才能获得高精度的测量结果,而R T K(R ea卜币m e K i nem at i c)是能够在野外实时得到厘米级定位精度的测量方法RT K技术是以载波相位观测为基础的实时差分G P S定位技术。
在R TK作业模式下,基准站和流动站保持同时跟踪至少4颗以上的卫星,基准站通过数据链将其观测值和已知信息一起传送给流动站,流动站将自己采集的G P S观测数据和通过数据链接收来自基准站的数据在系统内组成差分观测方程并进行实时处理,在运动中求解起始相位模糊度值,同时通过输^相应的坐标转换参数,实时得到测点的三维坐标及精度。
GPS定位系统在水利工程中的方位指导作用摘要:水利工程的建设离不开地理信息系统的精准支撑,而gps 技术是地理信息系统建模的基础,其对于水利工程具有准确的方位指导功能。
本文谈及gps技术概述及其在水利工程中的重要应用,为进一步开发gps在水利工程建设方面的作用提供参考。
关键词:gps;定位系统;水利工程;方位中图分类号:x22文献标识码:a1gps技术概述水利资源是大自然赋予人类的宝贵资源,而水利水电建设事业与其所处的地理环境密不可分[1]。
精确掌握工程地所处环境的地理信息,对水利水电工程建设的方位提供精准的信息支持和方位指导作用,以此来确保水利水电工程的高效性、科学性和安全性具有举足轻重的作用。
众所周知,工程在规划(搜集区域地形地貌等信息数据,结合地理信息系统分析数据,进而辅助工程的选址、布置及施工方案)、设计(利用地理信息系统建模,对大坝选址、建设进行计算机模拟,并对水库蓄水量、防洪能力和调水能力等指标进行反复可行性分析)、施工(利用三维功能构建工程立体模型以多角度显示工程的设计参数指导施工)及运行管理阶段(利用变形监测数据处理软件实时、动态监测以避免地质灾害的发生)无时无刻离不开地理信息系统,而该系统构建的基础就是全球定位系统(global positioning system ,gps)。
gps是无线式、被动导航系统,是美国国防部于1973 年所筹建的全球定位系统,至1994 年24颗卫星全部投入使用(由21颗卫星和3颗备用卫星所组成,均匀分布在6个轨道面上,距地面高度约20 000km,轨道面倾角为55°,轨道扁心率接近0,运行周期为12h,可以说在地球上任何时间和地点均可观测4~9颗卫星[2])。
gps以其连续、实时、高精度、全天候测量和自动化程度高[3]等优势广泛被水利水电等设计部门所青睐。
2gps在水利工程中的应用2.1动态水压监测大坝变形的外力通常源于水压,其对水库的安全构成隐患,因此对大坝变形进行精密、连续监测是后续项目管理的重要环节,而利用gps 技术对大坝进行测量可获悉令人满意的结果。
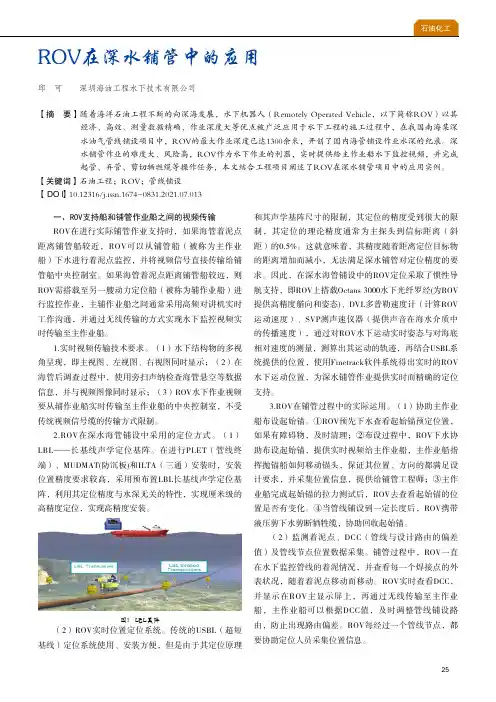
25一、ROV支持船和铺管作业船之间的视频传输ROV在进行实际铺管作业支持时,如果海管着泥点距离铺管船较近,ROV可以从铺管船(被称为主作业船)下水进行着泥点监控,并将视频信号直接传输给铺管船中央控制室。
如果海管着泥点距离铺管船较远,则ROV需搭载至另一艘动力定位船(被称为辅作业船)进行监控作业,主辅作业船之间通常采用高频对讲机实时工作沟通,并通过无线传输的方式实现水下监控视频实时传输至主作业船。
1.实时视频传输技术要求。
(1)水下结构物的多视角呈现,即主视图、左视图、右视图同时显示;(2)在海管后调查过程中,使用旁扫声纳检查海管悬空等数据信息,并与视频图像同时显示;(3)ROV水下作业视频要从辅作业船实时传输至主作业船的中央控制室,不受传统视频信号缆的传输方式限制。
2.ROV在深水海管铺设中采用的定位方式。
(1)LBL——长基线声学定位基阵。
在进行PLET(管线终端)、MUDMAT(防沉板)和ILTA(三通)安装时,安装位置精度要求较高,采用预布置LBL长基线声学定位基阵,利用其定位精度与水深无关的特性,实现厘米级的高精度定位,实现高精度安装。
图1 LBL基阵(2)ROV实时位置定位系统。
传统的USBL(超短基线)定位系统使用、安装方便,但是由于其定位原理和其声学基阵尺寸的限制,其定位的精度受到很大的限制,其定位的理论精度通常为主探头到信标距离(斜距)的0.5%。
这就意味着,其精度随着距离定位目标物的距离增加而减小,无法满足深水铺管对定位精度的要求。
因此,在深水海管铺设中的ROV定位采取了惯性导航支持,即ROV上搭载Octans 3000水下光纤罗经(为ROV 提供高精度艏向和姿态)、DVL多普勒速度计(计算ROV 运动速度)、SVP测声速仪器(提供声音在海水介质中的传播速度),通过对ROV水下运动实时姿态与对海底相对速度的测量,测算出其运动的轨迹,再结合USBL系统提供的位置,使用Finetrack软件系统得出实时的ROV 水下运动位置,为深水铺管作业提供实时而精确的定位支持。
差分GPS的测量精度及其在水下测量中的应用摘要:随着时代的进步,GPS这项技术发展迅猛,也越发的成熟,给水下测量的工作提供了有利条件,用户越来越多地利用空间进行移动测量。
全面的定位精度、快速的实时操作和高精度的性能正变得越来越明显。
GPS技术与先进的测深仪技术的相结合标志着水下测量技术质的飞跃,同时也是现代科技与工业生产的一个重要实施。
差分GPS以各种不同的差分模式运行,由于测量精度的差异性,在水下工程得到广泛的运用,这对于水上运输项目的水下地形测绘至关重要。
关键词:差分GPS;RTK;信标;星站差分;水下测量引言:近年来,随着GPS相位差载波(RTK)技术的发展,GPS技术变得越来越先进,并被广泛用于数字测绘。
有时会出现这样的情况:在水运项目的早期建设阶段,由于研究区域通常是山区,能见度低、天气恶劣、地形复杂,可能会给传统的野外测绘带来一些问题。
使用GPS动态定位技术进行快速准确的测绘,可以消除累积误差,使用方便,所需人员较少,并具有其他优势,可以取代原来用平面仪测和全站仪测绘。
很明显这项GPS技术的高速发展让生产力和经济效益已经大大增加。
1.差分定位原理DGPS(差分全球定位系统)的工作原理是两个GPS接收器安装在两个站点上,对同一个GPS卫星的导航信号进行同步测量,基站根据已知的坐标对所观察的数据进行修正,并不断将所观察的数据传送给移动站,移动站实时修正其观测值,以确定准确位置。
水下地形图绘制通常用于水利工程项目的建设。
水下测量通常是由测量船进行的,平面测深中心的位置必须与水深一起测量。
差分定位技术为水下测量的平面定位提供了极大的便利。
根据所需的测量精度,可以采用多种不同的定位方法模式,通常情况下常用RTK差分模式、COSS差分模式、星站差分模式和信标差分模式。
2.RTK差分模式RTK(实时动力学)操作是使用RTK型全面高精度GPS接收器进行的。
这一般是一个在已知地点的一个基站并通过无线电台站发射一个差分信号来实现的,该信号可以在离原点几厘米的地方进行测量(假设固定解决方案被锁定并静止几秒钟),并被广泛使用。
水下清管跟踪定位设备在海底管道的技术应用海洋石油生产的输送管道系统中,清管作业是油气输送管道投产前和运行中的一项重要且必不可少的工作。
清管作为一项风险较高作业,一旦清管器卡在管道某个位置且不能及时定位,则可能影响整个海上油田的生产。
因此,清管器的跟踪定位是清管作业中一项极为重要的内容,文章通过南海某油田的新建管线清管跟踪定位设备实际应用,阐述了油田投产前对海底管线的清管作业应用清管跟踪定位设备基本操作方法,为以后类似的工程项目提供了有益的参考。
标签:海底管线;清管器;清管定位追踪设备引言随着国内外海洋油气资源的不断开发和利用,海底管道项目越来越多。
海底管线投产前和运行中的清管作业,发射清管器进入管道,沿管道运动。
如果清管器在管道中发生卡堵时,而常规的解决卡堵的措施还未解决卡球的问题,则可以根据清管器携带的跟踪定位系统及时准确找到卡球位置,以便采取合适的措施处理事故,避免造成更大的损失。
本文以清管跟踪定位设备在南海某油田的清管作业应用为例,介绍清管跟踪定位设备的使用原理、陆地模拟测试、清管作业实际操作。
从工程实际出发,分析清管跟踪定位设备的使用可能的风险及风险应急措施,以确保整个作业过程可靠性和安全性。
1 清管跟踪定位设备简介1.1 清管跟踪定位设备组成水下清管跟踪定位设备,主要是由高精度的耐磨的304不锈钢发射机与信号接收机及多种清管器的组合体。
发射机由发射机本体(含线圈)、可拆卸不锈钢法兰、密封圈、电池等组成。
可以安装任何类型的管道清管器内部或者外部拖拽使用,可涵盖直径为2”-60”管线。
发射机内部采用6节AA(1号)电池,内部安装线圈。
发射机的线圈发射低频电磁信号。
信号接收机由接收机本体、接收信号天线、高亮度LED信号灯、灵敏度调节按钮、潜水员把手(或ROV把手)、电池等组成。
信号接收机可以由潜水员携带操作,接收机采用一连串高亮度LED信号灯(接收机面板一般有16个信号灯)来表示显示接收发射机发射的信号的强度。
HiPAP 100 水下定位系统及应用【摘要】本文概述了HiPAP100水下定位系统的组成及其工作原理,并分别就其超短基线和长基线两项功能介绍了其在海洋调查中的广泛应用,说明其在相关海洋调查中的重要性。
【关键词】HiPAP;超短基线;长基线1.引言近年来人类的探索、开发逐渐向深海发展,深海中蕴藏着丰富的自然资源,包括石油天然气、钴结核、热液硫化物以及天然气水合物等资源,要准确找到这些海底宝藏,就需要对水下勘探设备进行精准的定位,水下定位系统的加入让我们可以精确地定位资源富集区。
HiPAP100水下定位系统由广州海洋地质调查局于2010年从挪威Kongsberg 公司引进,其固定安装于“海洋六号”船上,是一种基于声音在水中传播原理的定位参考系统。
引进至今,该系统已服务于多种水下设备,例如ROV水下机器人、海底摄像、磁力深拖、声学深拖等,为我国南海调查以及大洋调查中的水下设备提供了高精度定位,特别是在大洋29航次海底摄像作业中,HiPAP 100为水下5500米深、距母船近8000米的摄像拖体提供了较稳定的高精度定位。
“海洋六号”船上的HiPAP 100水下定位系统在我国是唯一的,因此对大多数人来说是陌生的。
本文主要介绍HiPAP100水下定位系统的组成、工作原理和功能。
2.HiPAP家族HiPAP是“高精度水声学定位”的简称,是一种基于声音在水中传播原理的定位参考系统。
HiPAP系统的主要功能是船舶与应答器的相对定位。
该系统同样可以用于监测传感器数值,如温度、压力(水深)、倾斜和航向等。
HiPAP系统也可以遥测控制水下系统,比如水声控制系统和水声接口记录器。
首先了解下HiPAP家族,其共有五种类型:HiPAP100、350、350P、450和500,它们拥有共同的软件和硬件平台,因而可以提供相同的额外功能和选项。
HiPAP100使用球型换能器,含31个换能器元件,覆盖范围为±60°,是一种低频系统,其工作频率是10-15.5kHz,适用于深水区域,其作用范围为1-10000m,其余四种系统则都是中频系统,工作频率为21-31kHz;[1]HiPAP350和350P都使用半球型换能器,含46个换能器元件,覆盖范围为±60°,作用范围为1-3000m,其中HiPAP350是固定的船上系统,而HiPAP350P 是一种便携式系统;HiPAP450使用球型换能器,为固定的船上系统,它具有与HiPAP350系统一样的操作和技术性能,同时有着与HiPAP500一样的换能器元件,虽然只有46个元件,覆盖范围为±60°,作用范围为1-3000m,另外它可以升级为与HiPAP500一样的性能;HiPAP500使用球型换能器,含241个换能器元件,覆盖范围为±100°,作用范围为1-4000m,为固定的船上系统。
水下导航定位技术的探究◎ 张文秀 忻州师院五寨分院摘 要:随着水下导航器技术的不断发展,导航系统成为水下航行器研究的主要技术核心,实现水下精确定位成为目前水下航行器定位导航系统研究的一个重要分支。
本文对几种常用自主导航方式的优缺点进行了对比,提出采用组合导航方式可以提高导航的可靠性和准确度。
关键词:水下航行器 组合导航 精确定位迄今为止,应用于水下航行器的导航方式一类是凭借于外部信号的非自主导航,另外一类则是凭借传感器得到信号的自主导航方式。
前者的导航基础是运载体可以接受到来自于外部信号的条件下才能完成导航,如罗兰、欧米加及其GPS等,三者中GPS凭借其广泛的信号面积导航能力更佳且更为准确。
然而,该导航方式存在着自身的不足,由于其信号来自于外部,主要的方式是无线电导航,信号衰减非常严重,非自主导航局限于水上之上的定位,在水下航行器中的应用十分有限。
对于后者,导航主要依靠自身配备装置的传感。
基于不同的传感装置,将自主导航方式分为很多类,如携带惯性测量装置的惯性导航系统、配备水声换能器的声学导航、装有地形匹配或者地磁传感器的地球物理导航等导航系统。
1.水下航行器常用导航方法1.1航位推算和惯性导航系统航位推算法主要是对航行器的速度进行时间的积分求积分来确定其所在的位置,应用比较早且范围较广。
为了得到航行器的航行速度,需要确定航行器的速度和航向,因此需要流速传感器或者是航向传感器来确定航行器的速度和航向。
采用流速传感器测量航行速度的过程中,海流会影响航行器的速度,且对流速的影响是流速传感器不能测到的,海流对流速的影响进而会产生导航误差,速度较慢航行较长的情况下,误差会很大。
惯性导航系统利用测量得到的航行器的加速度,经过一次积分运算计算出速度,两次积分运算得到航行器的位置,具有自主性、无需外界信息源以及隐蔽性的优点。
可以将其分为平台式和捷联式两种形式。
空间大小、功率以及价格的限制,普通的航行器均采用捷联式,该方式的导航系统(SINS)容易实现导航与控制的一体化。
自主水下航行器导航与定位技术发布时间:2023-02-03T02:36:04.888Z 来源:《科学与技术》2022年第18期作者:杜晓海[导读] 自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,杜晓海海军装备部 710065摘要:自主水下机器人(AUV)作为开发和利用海洋资源的主要载体,在执行任务时需要准确的定位信息。
现有AUV主要采用基于捷联惯性导航系统(SINS),辅以声学导航和地球物理场匹配导航技术。
本文简要介绍了水下导航模式的基本原理、优缺点和适用场景;讨论了各种导航模式中的关键技术,以提高组合导航的精度和稳定性。
通过分析现阶段存在的问题,展望了水下航行的未来发展趋势。
关键词:自主水下航行器;智能导航;智能定位本文综述了目前主流的AUV水下导航关键技术,包括DVL测速技术、LBL/SBL/USBL水声定位导航技术、地形辅助导航技术、地磁辅助导航技术和重力辅助导航技术以及协同导航技术,介绍了相关导航技术的基本原理和发展,分析和总结了水下自主导航中各技术的关键问题和技术难点,最后展望了AUV水下导航技术的未来发展。
1 SINS/DVL定位技术DVL是一种利用声波多普勒效应测量载流子速度的导航仪器。
根据AUV与水底之间的相对距离,DVL有两种模式:水底跟踪和水底跟踪。
当载流子与水底的相对距离在该范围内时,声波可以到达水底,当AUV与水底之间的相对距离超过范围时,声波无法到达水底,DVL采用水跟踪模式。
根据传输波速的多少,可以分为单波束、双波束和四波束。
1.1 SINS/DVL对准技术惯性导航可以为AUV提供实时的姿态、速度、位置等导航信息。
然而,初始对准必须在使用前进行,初始对准的结果在很大程度上决定了最终的集成精度。
通常,AUV在停泊或航行于水面时接收GPS信号进行初始对准。
在特定的任务背景下,AUV需要在水下运动期间完成初始对准,因此,许多学者提出了基于DVL辅助的移动基站对准。
GPS-RTK技术在水利测量中的应用实践微探摘要:GPS-RTK技术是一种现代化的工程测量手段,将其用于水利工程测量,能有效地提升工程测量的效率和精度。
本文在阐述GPS-RTK技术系统组成和优势特征的基础上,就水利测量中GPS-RTK技术的具体应用情况展开分析,并指出提升GPS-RTK技术在水利测量中应用精度的办法。
期望能实现GPS-RTK技术与水利工程测量的深层次结合,继而在提升GPS-RTK技术应用水平的同时,保证水利工程测量质量,促进水利工程建设项目的有序发展。
关键词:GPS-RTK技术;水利工程;测量技术;应用水利工程建设是关系国计民生的重要事项,步入新时期以来,水利工程开发利用的形式逐渐多元,这就对工程建设质量提出了更高要求。
测量工作是水利工程前期建设的重要环节,其直接关系着水利设施后期的设计、施工和维护效果,并且对于人们的生产生活质量具有较大影响。
现阶段,基于高效率、高精度水利测量需要,新型测量技术在水利工程测量中的应用不断深入;GPS-RTK技术是基于高精度GPS定位和回声技术而产生的全新测量形式,其有效地满足了水利测量需要,为新时期的水利工程建设创造了有利条件。
一、GPS-RTK技术系统组成及优势特征1、GPS-RTK系统组成作为一种全新化的工程测量手段,GPS-RTK技术系统包含了基准站、流动站及通信系统三个基本单元。
就基准站而言,其能在跟踪载波相位观测信号的基础上,实现测站的坐标、观测值、卫星跟踪状态和收机工作状态等信息的精准把控。
而流动站的作用体现在,其能实现对GPS卫星信号的载波相位观测,同时接收基准站相关信息,在这些信息综合分析利用下,进行参数转化和投影分析,可实现流动站坐标的准确计算。
现阶段,在GPS-RTK技术下,工作人员通过基准站和移动站的合理设置,可以建5颗以下卫星信号的接收管理,随后在载波相位观测技术下,可实现目标物的有效勘测。
2、技术特征优势相比于传统的工程测量手段,GPS-RTK技术的应用具有极为突出的优势:其一,GPS-RTK技术本身是在高新技术支撑下发展起来的测量技术,其具有定位准确,测量结果准确性高的特点,在实际测量中,其能有效提升工程项目的测量精度,减少测量误差。
水下定位计算水下定位计算通常指的是确定水下物体或潜水员在三维空间中的位置。
这种计算可以用于导航、搜寻、打捞、水下施工等多种场合。
水下定位的方法有很多,包括但不限于以下几种:1. 声呐定位:使用声波在水中传播的特性,通过发送声波并接收其反射信号来确定物体的位置。
这种方法常用于潜艇和船只的避障和定位。
2. 超短基线(USBL)定位:通过在水下物体上安装一个发射器,水面上的船或平台上的接收器接收发射器发出的声波信号,通过测量声波的传播时间来计算物体的位置。
3. 长基线(LBL)定位:在水域底部布设一系列的声呐信标,通过测量水下物体与这些信标之间的距离来计算其位置。
4. 惯性导航系统(INS):利用加速度计和陀螺仪等传感器来跟踪物体的运动,从而推算出其位置。
这种方法不依赖于外部信号,但随着时间的推移会有累积误差。
5. 卫星导航:虽然GPS信号不能直接穿透水面到达水下,但可以通过水面上的浮标或船只接收GPS信号,并结合其他传感器数据来辅助水下定位。
6. 水下无线光通信:在清澈的水中,可以使用光信号进行短距离的通信和定位。
7. 水下节点网络:部署一系列的水下节点,通过节点间的通信来帮助确定水下物体的位置。
具体的水下定位计算方法取决于所使用的技术和设备。
例如,对于USBL系统,定位计算通常包括以下步骤:-测量声波从发射器到接收器的传播时间。
-将传播时间转换为距离(使用声速在水中的速度)。
-使用三角测量法,结合多个接收器的数据来确定发射器的三维位置。
在实际应用中,水下定位计算可能还需要考虑多种因素,如水流、水温、盐度对声速的影响,以及设备的精度和校准情况。
因此,水下定位是一个复杂的过程,需要专业的知识和技术。
GPS定位原理及其在海域施工中的应用摘要:随着GPS技术的发展,该技术在测量方面的应用,已充分显示了GPS测量技术较常规测量技术的优越性。
本文首先介绍了GPS 全球卫星定位系统的定位原理和特点,最后简要介绍了其在海域施工中的应用。
关键词:GPS 定位原理海域施工GPS是利用卫星的测时和测距进行导航,以构成全球定位系统。
它可向全球用户提供连续、实时、全天候、高精度的三维位置、运动物体的三维速度和时间信息。
GPS技术除用于精密导航和军事目的外,还广泛应用于大地测量、工程测量、资源调查等广泛领域。
1 GPS全球卫星定位系统的定位原理由于电磁波在空间的传播速度已被精确地测定了,因此我们可利用测定电磁波传播时间的方法,间接求得两点之间的距离。
GPS接收机是测量电磁波从卫星上传播到地面的单程时间来计算距离。
由于卫星钟和接收机钟不可能精确同步,所以用GPS测出的传播时间中含有同步误差,因此算出的距离并不是真实的距离,观测中把含有时间同步误差所计算的距离称为“伪距”。
为了提高GPS的定位精度,有绝对定位和相对定位之分,具体如下。
1.1 绝对定位原理绝对定位原理是用一台接收机,将捕获到的卫星信号和导航电文加以解算,求得接收机天线相对于WGS-84坐标系原点(地球质心)绝对坐标的一种定位方法。
此原理被广泛用于导航和大地测量中的单点定位。
由于单程测定时间只能测量到伪距,所以必须加以改正。
对于卫星的钟差,可以利用导航电文中所给出的有关钟差参数加以修正,而接收机小的钟差一般难以预先确定,所以通常把它作为一个未知参数,与观测站的坐标在数据处理中一起求解。
求算测站点坐标实质上是空间距离的后方交会。
在一个观测站上,原则上必须有3个独立的观测距离才可以算出测站的坐标,这时观测站应位于以3颗卫星为球心,相应距离为半径的球面与地面交线的交点上。
因此,接收机对这3颗卫星的点位坐标分量再加上钟差参数,共有4个未知数,所以至少需要4个同步伪距观测值。
基于长基线水声定位系统水下定位技术初步应用研究田春和;秦建【摘要】Long baseline positioning system, referred to as LBL,is a kind of high precise deep underwater posi⁃tioning system. Based on analyzing the development situations of LBL, the positioning theory and method were stud⁃ied systematically according to the experiment in Songhua lake, and the problems of seabed beacons laying, fixation and recycle in 50 m water depth were solved in this paper. Then relative calibration (baseline calibration) method and absolute calibration (box⁃in) were explored, and the tracking and positioning mode of localizer was determined. An integrated system and a positioning process of LBL were formed, and the high precise underwater positioning da⁃ta were obtained.%长基线定位系统(Long Baseline),简称LBL,是一种高精度深水水下定位系统。
文章在介绍了国内外LBL发展现状基础上,通过松花湖LBL水下定位系统试验,介绍了其定位理论和方法,解决了50 m水深海底信标布放、固定及回收问题,探索了海底应答器相对校准(基线校准)、绝对校准方法,确定了定位标的跟踪定位方式,形成了相对完整的LBL水下定位流程和方法体系,得到了高精度水下定位数据,为实际工程应用提供了真实的理论基础。
基于水下航行器导航定位及信息融合技术研究一、本文概述随着海洋资源的日益开发和利用,水下航行器在海洋探测、海底资源勘探、水下救援等领域的应用越来越广泛。
然而,水下环境的复杂性和不确定性,使得水下航行器的导航定位及信息融合技术成为其性能提升和广泛应用的关键。
本文旨在深入探讨水下航行器的导航定位技术及其信息融合方法,分析当前国内外研究现状,并在此基础上提出新的技术思路和改进方案,为水下航行器的性能提升和实际应用提供理论支撑和实践指导。
本文首先对水下航行器导航定位技术的基本原理和常用方法进行了详细介绍,包括声学导航、惯性导航、视觉导航等多种导航方式,以及各种导航方式的优势和不足。
在此基础上,对水下航行器信息融合技术的研究现状进行了综述,包括传感器数据融合、多源信息融合、导航与感知信息融合等方面的研究进展。
针对当前研究中存在的问题和不足,本文提出了一种基于多源信息融合的水下航行器导航定位方法。
该方法充分利用了声学、惯性、视觉等多种导航方式的优势,通过信息融合技术实现对水下航行器的高精度导航定位。
本文还提出了一种基于深度学习的水下环境感知模型,用于提高水下航行器对复杂环境的感知和适应能力。
本文对所提出的方法进行了仿真实验和性能评估,验证了其有效性和可行性。
对未来研究方向和应用前景进行了展望,以期为推动水下航行器技术的发展和进步做出贡献。
二、水下航行器导航定位技术基础水下航行器的导航定位技术是其实现精确导航与高效作业的关键所在。
该技术融合了多种学科领域的知识,包括物理学、数学、控制工程以及海洋科学等。
其核心技术主要包括声纳导航、惯性导航、视觉导航以及地磁导航等。
声纳导航:声纳(SONAR)是水下航行器最常用的导航手段之一。
它利用声波在水中的传播特性,通过发射声波并接收其反射回波,从而获取航行器与周围环境的相对距离和形状信息。
声纳导航的优点在于其工作范围广泛,不受光线条件限制,但精度受水质、水温、盐度等多种因素影响。
RTK技术在水下地形测量中的应用摘要:简要介绍了利用GPS RTK技术测定水下地形的基本原理和工作流程以及影响测量精度的关键因素。
测绘信息网关键词:GPS RTK;航道测量;水下地形测量Abstract: briefly introduce the use of GPS RTK to detection of underwater topography of the basic principle and the working process and the key factors of affecting measuring accuracy.Key words: GPS RTK ;Channel measurement;Underwater topographic survey1 引言测绘信息网GPS技术的出现,带来了测量方法的革新,在大地控制测量、精密工程测量及变形监测等应用中形成了具有很大优势的实用化方案。
尤其是GPS RTK技术能够在野外实时得到厘米级定位精度,为工程放样、地形测图、地籍及房地产测量、水下地形测量等带来了新的作业方法,极大地提高了野外作业效率,是GPS应用的里程碑。
特别是利用RTK技术进行水下地形测量,效率提高更明显。
2 RTK技术的基本原理测绘信息网RTK技术始于20世纪90年代初,是基于载波相位观测值基础上的实时动态定位技术。
如图1所示,RTK技术的工作模式是在已知点上架设基准站,接受机借助电台将其观测值及坐标信息,发送给流动站接收机,流动站接收机通过电台(数据链)接受来自基准站的数据,同时还要采集GPS观测数据,在系统内形成载波相位差分观测方程,采用卡尔曼滤波技术,在运动中初始化求出整周模糊度。
并进行实时处理,求得其三维坐标(X,Y,Z),精度可达厘米级。
3 水下地形测量原理水下地形测量包括两部分:定位和水深测量。
就目前的水下地形测量的主流技术而言,定位采用的是GPS 差分定位模式,而水深测量采用的是回声测深仪的方法。
测深仪结合GPS技术在水利测量中的应用摘要:21世纪,水下是丰富资源的宝库,随之而来的是水下资源开发时代。
水下测量技术的创新和发展也成为衡量国际竞争力的条件之一。
RTK显然是最流行的测量技术。
它取代了通过铺设控制网和使用经纬仪或平面仪器正向交会确定测深点的定位方法,成为人们日常生活中使用的一种高速、高效、高精度的测量技术。
本文利用全球定位系统和数字测深的原理获取水深数据,从而获得水下点的测量数据。
对两类数据进行误差分析,提供相应的误差修正,对结果进行分析,并提出GPS与数字测距仪组合系统在工程应用中的不足。
关键词:测深仪结合;GPS技术;水利测量;应用1GPS测量原理与数字测深技术1.1GPS定位原理及特点GPS的基本定位原理是通过测距交点确定测点的位置。
GPS接收器从卫星接收的载波信号与接收器的本地振荡器参考信号之间的相位差是载波相位的测量原理。
全球定位系统的基本测距方法使用测距码进行伪测距。
然而,对于高精度应用,伪测距中测距码的长度相对较大,无法满足其高精度要求。
然而,大地测量接收器中使用的载波相位测量精度可以达到1mm~2mm,有些甚至可以达到更高的精度。
1.2GPS系统组件GPS系统包括三个部分:GPS卫星星座(空间部分)、地面监控系统(地面控制部分)和GPS信号接收器(用户设备部分)。
这颗卫星位于距离地球表面20000多公里的高度。
有21颗工作卫星和3颗备用卫星分散用于应急或替换工作。
这24颗卫星构成了全球定位系统卫星星座。
其功能是接收地面控制操作指令,完成数据分析处理,调整卫星姿态,并提供时间测量、速度测量、定位等服务。
1.3测深仪的基本工作原理和分类1.3.1测深仪的基本原理首先,假设船体处于最佳理想工作状态(船体不会摆动,在测量立即完成之前不会有位移等);其次,测深器安装在船体上,并在水下发出声波。
声波在水中以一定的速度V传播,当遇到障碍物或反射器时,声波被折射或反射。
然后,它们被换能器接收器接受,并且计算它们的时间t。
水下潜器组合导航定位及数据融合技术研究一、概述水下潜器组合导航定位及数据融合技术研究,是近年来海洋工程领域的重要研究方向之一。
随着水下潜器在民用和军事领域的广泛应用,其导航定位精度和可靠性成为制约其性能提升的关键因素。
传统的单一导航方式,如惯性导航、声学导航等,虽然各有其优点,但在复杂多变的水下环境中,其性能往往受到限制。
研究水下潜器组合导航定位及数据融合技术,对于提高水下潜器的导航定位精度和可靠性具有重要意义。
组合导航定位技术通过集成多种导航传感器的信息,充分利用各种导航方式的优点,克服单一导航方式的局限性。
在水下潜器组合导航定位系统中,常用的导航传感器包括惯性测量单元、多普勒计程仪、声学信标等。
这些传感器能够提供不同的导航信息,如速度、位置、姿态等,通过合理的融合算法,可以实现信息的互补和优化,提高导航定位精度。
数据融合技术是实现组合导航定位的关键。
在水下潜器组合导航定位系统中,由于各种导航传感器的工作原理和性能特点不同,其提供的数据可能存在误差、噪声和不确定性。
需要通过数据融合技术,对多源导航数据进行处理和分析,提取出有效的导航信息,抑制噪声和误差的影响,提高导航定位的稳定性和可靠性。
水下潜器组合导航定位及数据融合技术的研究已经取得了一定的进展。
仍面临着诸多挑战和问题。
如何选择合适的导航传感器进行组合,如何设计有效的融合算法以充分利用各种导航信息,如何在实际应用中实现高精度、高可靠性的导航定位等。
需要进一步深入研究水下潜器组合导航定位及数据融合技术,推动其在实际应用中的发展。
水下潜器组合导航定位及数据融合技术研究是一项具有重要意义和挑战性的研究工作。
通过深入研究和实践,有望为水下潜器的导航定位性能提升提供有效的技术支持,推动海洋工程领域的发展。
1. 研究背景与意义随着海洋经济的快速发展和国防安全需求的提升,水下潜器在海洋探测、资源开发、军事侦察等领域的应用日益广泛。
水下环境复杂多变,导航定位技术面临着诸多挑战。
水下导航定位系统在水下作业中的应用
【摘要】水下导航定位技术是一种集成了导航测姿、水声定位、GPS定位的综合性技术,可广泛应用于水下作业中,如引导潜水员进行打捞、对水下目标进行精确定位等等。
介绍了水下导航定位系统的组成结构,以及在水下作业中的应用。
【关键词】超短基线;水声定位;导航测姿;水下作业
1.引言
由于深水区域往往能见度较低,且水下周围一般没有参照物,因此潜水员在进行打捞、救助等水下作业活动时,常常会无法准确辨别自身所处位置,无法获知与工作船、打捞目标之间的相对位置关系,给水下作业带来一定困难。
为提高水下搜索作业效率,实现指挥员对潜水员的实时监控,需要配备水下导航定位系统,对潜水员的绝对位置进行精确定位,并引导潜水员进行水下作业。
2.水下导航定位系统的组成
水下导航定位系统一般主要由超短基线水声定位系统(USBL)、导航测姿系统、GPS系统以及潜水导航系统组成。
如图1所示。
图1 水下导航定位系统组成
2.1 超短基线水声定位系统
超短基线水声定位系统主要由超短基线声基阵、声信标以及水声定位处理计算机组成。
超短基线声基阵向水下发送询问信号,声信标接收到询问信号后,向超短基线声基阵发送应答信号,水声定位处理计算机根据超短基线各基元接收到的应答信号的延时,来解算声信标的相对距离和方位,从而对声信标进行定位[1]。
声信标一般安装在待定位设备上或者由潜水员随身携带。
图2 法国iXSea公司研制的GAPS
图2是法国iXSea公司研制的GAPS(Global Acoustic Positioning System)超短基线水声定位系统,该系统主要由超短基线水声定位基阵、GPS定位系统以及Octans光纤罗经。
GAPS系统的精度较高,且无需对导航测姿系统以及GPS定位系统进行校准,但其造价昂贵,用于一般水下作业性价比较低。
图3 Scout+超短基线水声定位系统
图3是英国Sonardyne公司研制的Scout+超短基线水声定位系统,其基阵内部带有5个声基阵基元,以及1个磁罗盘和1个MRU姿态传感器,若对水下目标定位的精度要求较高,则需要水声定位处理计算机外接高精度导航测姿系统和GPS系统,以替代超短基线声基阵内部的磁罗盘和MRU姿态传感器。
2.2 导航测姿系统
由于水声定位处理计算机在解算声信标的相对位置时,需要获得超短基线声基阵的姿态、艏向,因此一般声基阵内部集成有磁罗盘或者测姿传感器,但测量精度较差,要想获得对水下目标(声信标)的高精度定位,则需要在超短基线基阵附近安装精度较高的导航测姿系统,如光纤罗经等替代声基阵内部集成的测姿传感器,导航测姿系统将其测得的艏向角、横滚角、俯仰角信息实时发送至水声定位处理计算机,以便水声定位处理计算机实时精确解算声信标的位置。
导航测姿设备安装完毕后,应对导航测姿设备与超短基线声基阵的相对安装偏差进行校准[2],将导航测姿设备的固定安装偏差输入水声定位处理计算机,以提高水声定位的精度。
图4是法国iXSea公司研制的Octans光纤罗经,具备GPS秒脉冲同步、脉冲触发等功能,可用于精确测量艏向、横滚和俯仰角度,为水声定位处理计算机提供精确定位所需的声基阵的姿态信息。
图4 Octans光纤罗经
2.3 GPS定位系统
水声定位系统仅能解算出声信标与超短基线基阵的相对位置,为了准确计算声信标的绝对位置坐标,需要配备GPS定位系统,并将GPS天线安装于超短基线基阵附近。
在GPS定位系统安装完毕后,同样需要对其安装偏差进行校准[3],将GPS 天线的固定安装偏差输入水声定位处理计算机,以提高计算声信标绝对位置的精度。
为获得较高的定位精度,可配备RTK定位系统,即在岸边设置GPS基准站与发射电台,在工作船上设置GPS移动站与接收电台,将移动站的GPS天线安装于水声定位基阵附近,通过移动电台接收基准站发送的差分修正信息,可精确解算出声基阵的安装位置[4],其定位精度可达5cm+1ppm,有利于对水下目标的精确定位。
RTK定位系统虽然精度较高,但由于需要在岸边设置基准站与电台,受电台的发射功率限制,只能在近岸20km以内使用,在远海区域作业时,为了获得高精度的GPS定位信息,可使用DGPS星际差分定位系统,不需要电台,通过GPS处理机内部的信标板接收不同卫星的定位信息进行差分,也可获得较高的定位精度[5],其定位精度可达0.15m。
但此种GPS信息获取方法需要向运营商支付一定金额的服务费,且有使用时间限制。
2.4 潜水导航系统
潜水导航系统主要用于潜水员在水下作业时对行进方向、水下目标的判别。
常用的潜水导航设备主要有水下导航仪、水下指南针、水下电话以及手持声纳。
水下导航仪可接收来自水声定位系统的信息,使得潜水员能在水下看清自己和船以及目标的相对位置;水下指南针主要为潜水员水下作业提供方向判别;水下电话用于潜水员与工作船进行联系,对指挥员的方向控制进行响应;手持声纳一般用于潜水员对水下目标进行搜索时使用。
手持声纳上配备简易导航系统,潜水员可根据指挥员的信息,向指定方向进行探测。
手持声纳如图5所示。
图5 手持声纳
3.水下导航定位系统的应用
3.1 引导潜水员进行水下作业
在潜水员进行水下作业时,为了准确获得潜水员的工作位置,需配备水声定位系统与声信标,超短基线水声定位系统、潜水员供气系统安装在工作船上,潜水员身上除了潜水装备外,还挂接一个声信标,对水声定位基阵的询问信号进行应答,通过水声定位处理计算机可实时解算声信标的位置,掌握潜水员的水下运动情况。
如图6、7、8所示。