SAR_雷达_建模__仿真
- 格式:doc
- 大小:806.59 KB
- 文档页数:44

SAR图像点目标仿真报告徐一凡1 SAR原理简介合成孔径雷达(Synthetic Aperture Radar .简称SAR)是一种高分辨率成像雷达技术。
它利用脉冲压缩技术获得高的距离向分辨率.利用合成孔径原理获得高的方位向分辨率.从而获得大面积高分辨率雷达图像。
SAR回波信号经距离向脉冲压缩后.雷达的距离分辨率由雷达发射信号带宽决定:2rrCBρ=.式中rρ表示雷达的距离分辨率.rB表示雷达发射信号带宽.C表示光速。
同样.SAR回波信号经方位向合成孔径后.雷达的方位分辨率由雷达方位向的多谱勒带宽决定:aaavBρ=.式中aρ表示雷达的方位分辨率.aB表示雷达方位向多谱勒带宽.av表示方位向SAR平台速度。
在小斜视角的情况下.方位分辨率近似表示为2aDρ=.其中D为方位向合成孔径的长度。
2 SAR的几何关系雷达位置和波束在地面覆盖区域的简单几何模型如图1所示。
此次仿真考虑的是正侧视的条带式仿真.也就是说倾斜角为零.SAR波束中心和SAR平台运动方向垂直的情况。
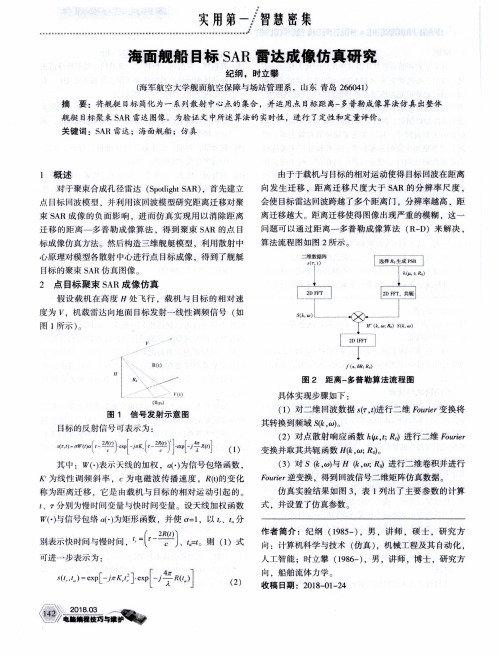
图1 雷达数据获取的几何关系建立坐标系XYZ如图2所示.其中XOY平面为地平面;SAR平台距地平面高H.以速度V 沿X轴正向匀速飞行;P点为SAR平台的位置矢量.设其坐标为(x,y,z); T点为目标的位置矢量.设其坐标为(,,)T T Tx y z;由几何关系.目标与SAR平台的斜距为:222()()()T T TR PT x x y y z z==-+-+-(1)由图可知:0,,0T yz H z ===;令x v s =⋅.其中v 为平台速度.s 为慢时间变量(slow time ).假设T x vs =.其中s 表示SAR 平台的x 坐标为T x 的时刻;再令22T r H y =+.r 表示目标与SAR 的垂直斜距.重写(1)式为:2220(;)()PT R s r r v s s = =+⋅- (2)(;)R s r 就表示任意时刻s 时.目标与雷达的斜距。


【雷达通信】合成孔径雷达(SAR)的点目标仿真matlab源码•*SAR原理简介*用一个小天线作为单个辐射单元,将此单元沿一直线不断移动,在不同位置上接收同一地物的回波信号并进行相关解调压缩处理。
一个小天线通过“运动”方式就合成一个等效“大天线”,这样可以得到较高的方位向分辨率,同时方位向分辨率与距离无关,这样SAR就可以安装在卫星平台上而可以获取较高分辨率的SAR图像。
图1 SAR成像原理示意图1、几个参重要参数为了更好的理解SAR和SAR图像,需要知道几个重要的参数。
•分辨率SAR图像分辨率包括距离向分辨率(Range Resolution)和方位向分辨率(Azimuth Resolution)。
图2 距离向和方位向示意图•距离向分辨率(Range Resolution)垂直飞行方向上的分辨率,也就是侧视方向上的分辨率。
距离向分辨率与雷达系统发射的脉冲信号相关,与脉冲持续时间成正比:Res( r) = c*τ/2其中c为光速,τ为脉冲持续时间。
•方位向分辨率(Azimuth Resolution)沿飞行方向上的分辨率,也称沿迹分辨率。
如下为推算过程:·真实波束宽度:β= λ/ D·真实分辨率:ΔL = β*R = Ls (合成孔径长度)·合成波束宽度βs = λ /(2* Ls) = D / (2* R)·合成分辨率ΔLs = βs* R = D / 2其中λ为波长,D为雷达孔径,R为天线与物体的距离。
从这个公式中可以看到,SAR系统使用小尺寸的天线也能得到高方位向分辨率,而且与斜距离无关(就是与遥感平台高度无关)。
图3 方位向分辨率示意图•极化方式雷达发射的能量脉冲的电场矢量,可以在垂直或水平面内被偏振。
无论哪个波长,雷达信号可以传送水平(H)或者垂直(V)电场矢量。
接收水平(H)或者垂直(V)或者两者的返回信号。
雷达遥感系统常用四种极化方式———HH、VV、HV、VH。

sar面目标回波仿真matlab程序根据提供的信息,可以得知,本篇回答是关于 SAR 面目标回波仿真MATLAB 程序方面的。
SAR 技术全称 Synthetic Aperture Radar,是一种利用合成孔径技术合成雷达波束的一种雷达成像技术。
SAR 系统可将地面平面上各个点的反射信号合成为一条与雷达运动方向垂直的轨迹,从而得到一张高分辨率的 SAR 图像。
在 SAR 图像重建的过程中,面目标回波仿真是一个非常重要的步骤。
通过对面目标回波仿真计算,我们可以模拟测试 SAR 系统对不同类型目标的检测识别能力以及成像效果,从而确定 SAR 系统的整体性能,为 SAR 的实际应用提供依据。
而 MATLAB 是一款十分优秀的科学计算软件,它提供了非常丰富的功能工具箱和可视化工具,方便科研人员和工程师们快速有效地实现SAR 的图像处理、面目标回波仿真等计算过程。
下面我们将重点介绍一下如何使用 MATLAB 实现 SAR 面目标回波仿真程序设计。
首先,我们需要定义一个面目标,包括其散射中心、面积、形状、反射率等参数。
然后,通过 SVD(奇异值分解法)或其他数值计算方法对目标进行回波模拟,得到模拟回波数据。
接着,将模拟回波数据代入SAR 成像算法,对其进行图像重建与处理,得到SAR 图像。
最后,通过对 SAR 图像的分析和评估,确定 SAR 系统性能和目标检测效果的准确性。
具体实现过程如下:1. 定义面目标的散射中心、面积、形状和反射率等参数。
二维图形中,可以用矩阵表示目标的位置和大小;三维图形中,可以用立方体体元 (cubature) 表示目标的位置、大小、方向和反射率。
2. 对目标进行回波模拟。
可以考虑使用 SVD 等数值计算方法,将目标的反射系数表示为若干个基函数的线性组合形式,然后将其分段连续函数化,用离散化的形式进行数值计算,得到目标回波数据。
3. 进行 SAR 成像算法处理。
可以选择相位历程算法、谱带归一化算法、旋转并且叠加相干序列算法等成像算法。

SAR成像RD算法MATLAB仿真在雷达成像中,SAR(Synthetic Aperture Radar)是一种通过向地面发射微波信号并接收反射回来的信号,来生成高分辨率地面图像的技术。
而RD(Range Doppler)算法是一种常用的SAR成像算法,用于将获得的原始数据处理成可视化的图像。
MATLAB是一种在科学和工程领域广泛使用的数学软件,具有强大的矩阵运算和图像处理功能。
下面将介绍如何使用MATLAB进行SAR成像的RD算法仿真。
首先,需要生成模拟的SAR返回信号。
可以使用MATLAB的信号处理工具箱中的函数进行模拟。
假设我们使用一个长度为N的脉冲信号进行雷达扫描,在SAR成像中,我们通常使用线性调频(Linear Frequency Modulation)信号。
可以使用MATLAB的`chirp`函数生成一个线性调频信号。
```matlabN=1024;%信号长度T=5e-6;%信号周期,信号的时间长度为T*Nfs = 100e6; % 采样频率f0=0;%初始频率f1=10e6;%终止频率t = 0:1/fs:T*N-1/fs;s = chirp(t, f0, T*N, f1);```接下来,我们需要生成一个代表地物散射特性的复数反射系数矩阵。
假设地面上有一个半径为R的圆形散射体,其反射系数为0.8、可以使用MATLAB的`meshgrid`函数生成一个二维的坐标网格,然后使用`sqrt`函数计算每个网格点到原点的距离。
```matlabR=5;%圆形散射体半径Np=100;%地物散射点个数x = linspace(-R, R, Np);y = linspace(-R, R, Np);[X, Y] = meshgrid(x, y);rho = sqrt(X.^2 + Y.^2); % 距离计算```然后,我们可以根据雷达与地物之间的距离计算相位偏移。
根据SAR 成像的原理,SAR返回信号中的每个采样点都对应着不同距离下的散射信号。
面向模拟训练的雷达SAR模式成像仿真方法研究摘要:雷达图像本质上是对目标后向散射系数的反映,雷达成像仿真通常采用基于特征的仿真方法,通过计算目标的后向散射系数,对图像的几何特征和辐射特征进行仿真。
雷达SAR模式成像分辨率高、计算量大,随着仿真计算量的不断增加,SAR模式成像仿真逼真度和实时性的矛盾逐渐浮现,传统的CPU无法满足成像仿真的实时性要求,采用CUDA并行计算架构,将CPU和GPU区别为不同的计算设备,有效提高了仿真计算能力,解决了雷达SAR模式成像仿真逼真度和实时性冲突的问题。
关键词:合成孔径雷达;模拟训练;雷达成像仿真;仿真实时性1 概述雷达是飞机的眼睛和耳朵,执行任务时雷达的地图测绘功能为飞机提供信息支持,与自动飞行系统和任务系统相结合,对地面目标进行侦查和攻击。
雷达对地攻击训练等典型训练科目易受空域及天气等因素限制,实施难度大、训练成本高、效率低,无法重现真实训练环境,这些因素限制了实况训练的开展。
开展模拟训练是解决这个问题的理想方法,仿真雷达不受外部条件限制,可以根据需要模拟实际中较难遇到的场景,成像来源灵活可控,并且能够在不损耗实装雷达的情况下进行多次重复训练,可有效提高训练质量[1,2]。
2 雷达SAR模式成像仿真方法SAR模式成像分辨率高、难度大,是雷达成像仿真中最复杂的部分,雷达成像仿真研究主要集中在SAR模式成像仿真。
目前,SAR模式成像仿真方法主要分为三类[3],如图1所示。
一是基于图像的SAR仿真方法。
该方法将真实的SAR图像看成目标后向散射能量矩阵的映射,通过SAR图像直接获得后向散射系数,然后结合雷达成像参数和载机参数得到其他平台和参数下的仿真图像。
该方法精度高,速度快,但由于真实的SAR图像较难获取,使用受限,主要用于对已有图像的重建。
二是基于回波信号的SAR图像仿真方法。
该方法是对成像过程进行仿真,通过仿真SAR回波信号生成SAR仿真图像。
该方法复现了SAR系统的工作过程,生成的仿真图像具有较高的逼真度,但计算复杂,仿真效率低。
合成孔径雷达仿真参数
合成孔径雷达(SAR)是一种通过合成天线孔径来产生高分辨率雷达成像的技术。
在进行SAR仿真时,需要考虑多种参数,包括以下几个方面:
1. 地物特征参数,地物的反射特性对SAR成像有着重要影响,包括地物的电磁特性、形状、方向等。
这些参数对于合成孔径雷达的仿真至关重要,因为它们直接影响着SAR成像的质量和分辨率。
2. 平台参数,包括飞行高度、速度、姿态稳定性等。
这些参数会影响到合成孔径雷达的观测角度和观测距离,进而影响成像的质量和分辨率。
3. 雷达参数,包括雷达频率、脉冲重复频率、极化方式等。
这些参数会直接影响到合成孔径雷达的成像性能,例如频率决定了分辨率,极化方式决定了反射特性。
4. 地形参数,地形对合成孔径雷达成像也有着重要的影响,包括地形的起伏、遮挡等。
在仿真中需要考虑地形对雷达信号的散射和反射情况。
5. 天气参数,大气条件对合成孔径雷达成像也有一定影响,例如大气湍流会导致信号的衰减和散射。
在仿真中需要考虑不同天气条件下的成像效果。
综上所述,合成孔径雷达的仿真参数涉及到地物特征、平台参数、雷达参数、地形参数和天气参数等多个方面,需要综合考虑这些参数对合成孔径雷达成像的影响,以获得准确的仿真结果。
SAR雷达成像仿真摘要雷达发展初期由于分辨率较低,其作用主要是“点”目标的检测和跟踪。
而现代机载雷达系统则要执行更多任务,从目标检测和识别到大面积地形测绘。
地形测绘可通过合成孔径雷达(SAR)实现。
通过采用相干辐射照射地面并测量回波信号,SAR可以产生地表的高分辨率二维图像,其成像质量由系统分辨单元的大小决定。
分辨单元由系统的距离和方位分辨率共同决定。
高的距离分辨率通过脉冲压缩技术实现。
高方位分辨率取决于天线尺寸及雷达波长,可以通过雷达运动达到增加天线孔径从而提高方位分辨率的目的。
本文简介了SAR的发展历史,着重研究条带式状正侧视SAR的成像原理,建立点目标回波模型,重点讨论了其R-D成像算法,介绍了目前常用的其他成像算法,在频域内对该算法进行了距离徙动校正(RCMC),从而得到多点目标的Matlab仿真。
关键词:SAR 正侧视距离徙动校正成像ABSTRACTBecause of low resolution radar at the early stage of development, its main function is "point target detection and tracking". The modern airborne radar system to perform more tasks, from the target detection and recognition to terrain mapping in large area. Topographic mapping can be actualized by synthetic aperture radar (SAR) . By using the coherent radiation and measure the echo signal,SAR can produce high resolution two-dimensional image , its imaging quality depends on the system resolution cell size. Resolution unit consists of range and azimuth resolution .High range resolution is achieved through the pulse compression technique. High range resolution depends on the size of the antenna and radar wavelength,the carrier’s motion is used to increase the antenna aperture radar so as to improve the range resolution of the.This paper introduces the development history of SAR, focuses on the imaging principle of belt shaped side looking SAR, and establishes the echo model of point target. The paper mainly part focuses on the R-D imaging algorithm, and introduces some other common imaging algorithm.The algorithm of range migration correction(RCMC) is solved in frequency domain,thereby getting the several-point-target Matlab imaging simulation.Keyword: SAR Side looking Range migration correction ImagingI目录第一章绪论 (1)1.1 合成孔径雷达(SAR)的发展历程和现状 (1)1.2 现代SAR的发展方向及意义 (2)1.2.1 多参数SAR系统 (2)1.2.2 聚束SAR (2)1.2.3 极化干涉SAR(POLINSAR) (3)1.2.4 合成孔径激光雷达(Synthetic Aperture Ladar) (3)1.2.5 星载合成孔径雷达的小型化 (3)1.2.6雷达与可见光卫星的多星组网是主要的使用模式 (4)1.3 论文的内容及结构安排 (4)第二章合成孔径雷达的工作原理 (5)2.1 线性调频信号及其脉冲压缩 (5)2.2 方位分辨率 (6)2.3 SAR点目标回波模型 (8)第三章合成孔径雷达的成像算法 (10)3.1 运动补偿技术的发展及现状 (10)3.1.1 引言 (10)3.1.2 基于运动传感器补偿算法的发展 (10)3.1.3 运动补偿算法的发展 (11)3.1.4 基于回拨数据运动补偿算法的发展 (12)3.1 距离徙动 (12)3.2 距离-多普勒算法(R-D算法) (15)3.2.1 原始正侧视及其改进的距离多普勒算法 (15)3.2.2 斜侧视下距离多普勒算法 (17)3.3 其他SAR成像算法简介 (18)3.3.1 线性调空变平移算法(Chirp Scaling,C-S) (18)II3.3.2 距离徙动算法(RMA) (19)3.3.3 极坐标格式算法(PFA) (19)3.3.5 频域变尺度算法(Frequency Scaling) (20)3.3.6 各算法的比较 (20)第四章成像仿真及分析 (22)第五章全文总结 (27)致谢 (28)参考文献........................................................................................ 错误!未定义书签。
错误!文档中没有指定样式的文字。
1第一章绪论1.1 合成孔径雷达(SAR)的发展历程和现状二十世纪五十年代,雷达家族中开始有了一个新成员合成孔径雷达(Synthetic Aperture Radar,SAR)的身影,作为一种新型雷达体制,它利用脉冲压缩技术和合成孔径原理实现对目标的识别成像,有着全天时,全天候的工作特点,能在雾、云、雨等气象条件下得到目标的高分辨图像。
在军事和民用领域均有着十分重要的研究意义和发展前景[1]。
1951年6月美国Goodyear宇航公司提出最初的频率分析方法来改善雷达的角分辨力,称为多谱勒波束锐化。
直至1957年,美国密歇根大学雷达和光学实验室研制的SAR系统成功获取第一张全聚焦的SAR图像[2]。
在1958年至1967年期间,SAR成功进行了飞行试验,并提出SAR装载于卫星上的设想,该设想实现于1978年。
该年5月,美国成功发射了全球首颗装有空间合成孔径雷达的人造地球卫星(Seasat-A),对地球表面进行测绘。
Seasat测绘带宽100公里。
具有很大的全球覆盖率,获得了大量新信息。
由此,SAR成功进入了太空时代。
1981年和1984年,美国分别进行了SIR-A和SIR-B的航天飞机搭载实验。
这两款卫星均源于SEASAT-A,工作于L波段。
其中SIR-A分辨率为37米,而SIR-B为35米且SIR-B的波束俯视角可变。
SIR-B可采用数字和光学两种方式记录、处理图像,比SEASAT的非实时数字处理成像速度快。
1987年7月,SAR分辨率提高到25米,由苏联发生的S波段ALMAZ- ISAR 系统所创造。
该雷达采用天线双侧式,是首部长期运行的空间合成孔径雷达。
但1988年,分辨率被由美国航天飞机“亚特兰蒂斯”号送上天的“长曲棍球(Lacrosse)”军事侦察卫星提高到1米左右,该卫星是全球第一颗高分辨率雷达成像卫星[3]。
1988年和1989年,线性极化C波段和X波段SAR系统出现,1990年又扩展到L波段。
该雷达系统为全极化,测绘宽度4公里。
九十年代起,SAR发展的新热点转移到了提供三维信息的干涉式SAR系统。
1991年7月,欧空局发射了ERS-1空间合成孔径雷达。
该雷达系统使用准极2地轨道,测绘带宽为100公里,分辨率30米。
该系统实现了平台姿态的动态控制。
根据ERS-1的特性,可以获得大量的星载SAR三维成像的试验数据,可提供全球气候变化情况,对陆地和近海水域进行观测。
1993年9月,美国宇航局航天飞机成像雷达SIR-C/X-SAR发射成功,该雷达是全球第一部多波段(L、C、X波段)、多极化、多投射角的空间合成孔径雷达。
轨道高度为250--325公里,测绘带可在15 至90公里范围内可变,分辨率为25米[4]。
多波段工作可以研究地物对不同频率的响应,用来区分和鉴别地物目标。
1994年NASA、DLR(德国空间局)和ASI(意大利空间局)共同进行了航天飞机成像雷达飞行任务SIR-C/X-SAR。
SIR-C为双频(L波段、C波段)全极化。
X-SAR则为单频X波段,单极化。
SIR-C/X-SAR第一次实现了使用多频、多极化雷达信号由空中向地球进行观测,SIR-C图像数据可帮助人们深入理解现象背后的物理机理,对土壤湿度、植被、海洋动力学、土壤侵蚀和沙化、火山活动等多项科学研究工作有着重要的促进作用。
进入到二十一世纪,SAR分辨率提高到0.1米数量级,广泛应用于全天候地形测绘,海洋洋流和极地冰山的跟踪观察、灾情预报、资源勘探及军事侦察等,成为国际雷达领域、遥感领域及众多学科的热点研究课题之一。
1.2 现代SAR的发展方向及意义1.2.1 多参数SAR系统SAR的不同极化方式可使被探测的地物具有不同的后向散射特性,地物层次变化对比也不相同。
因此,采用多极化方式,能显著改善信号和图像的详细性、可靠性,再加上观测频段和视角的不同,可以完整地定量分析地物的雷达散射特性。
正是如此,多参数SAR系统将会越来越被人们重视。
1.2.2 聚束SAR聚束工作模式,指在SAR飞行过程中,通过调整天线波束的方向,使波束始错误!文档中没有指定样式的文字。
3终“聚焦”照射在同一个目标区域。
“聚束”手段,增加了SAR方位向的合成孔径时间,等同于增加了合成孔径的长度,由此可以提高SAR的方位向分辨率。
而其高方位分辨率在许多场合是非常有价值的。
因此,聚束SAR技术应得到重视。
1.2.3 极化干涉SAR(POLINSAR)极化干涉SAR(Polarimetric SAR Interferometry)是通过极化和干涉信息的有效组合,同时提取观测对象的空间三维结构特征、散射信息,为微波定量遥感、高精度数字高程信息及观测目标的小形变信息的提取提供了可能性[5]。