精密旋变数字转换器测量角位置和速度
- 格式:pdf
- 大小:620.73 KB
- 文档页数:6

用于AD2S1210旋变数字参考信号输出的高电流驱动器电路功能与优势旋变数字转换器(RDC)广泛用于汽车和工业应用中,用来提供电机轴位置/速度反馈信息。
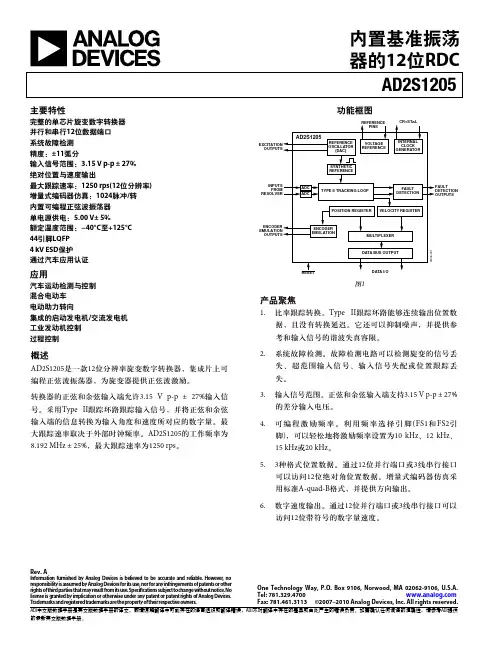
AD2S1210是一款完整的10 bit至16 bit分辨率RDC,片内集成可编程正弦波振荡器,为旋变器提供激励。
由于工作环境恶劣,AD2S1210(C级和D级)的额定温度范围为-40 ℃~+125 ℃的扩展工业温度范围。
图1所示的高电流驱动器放大AD2S1210的参考振荡器输出并进行电平转换,从而优化与旋变器的接口。
该驱动器是一个使用双通道、低噪声、精密运算放大器AD8662和分立互补发射极跟随器输出级的复合放大器。
一个类似的驱动器级用于互补激励输出,从而提供一个全差分信号来驱动旋变器初级绕组。
AD8662提供8引脚窄体SOIC和8引脚MSOP两种封装,额定温度范围均为-40 ℃~+125℃的扩展工业温度范围。
RDC与旋转传感器配合使用,以便检测电机轴的位置和转速。
在这种应用中,旋变器利用正弦波参考信号进行激励。
初级绕组上的旋变器激励参考信号被转换为两个正弦差分输出信号:正弦和余弦。
正弦和余弦信号的幅度取决于实际的旋变器位置、旋变器转换比和激励信号幅度。
RDC同步采样两个输入信号,以便向数字引擎(即所谓Type II跟踪环路)提供数字化数据。
Type II 跟踪环路负责计算位置和速度。
典型应用电路如图2所示。
根据旋变器的输入信号要求,激励缓冲器必须提供高达200 mA的单端电流。
图1所示的缓冲电路不仅提供电流驱动能力,而且提供AD2S1210激励输出信号的增益。
本电路笔记说明性能要求及推荐的激励缓冲拓扑结构。
典型旋变器的输入电阻在100 Ω~200 Ω之间,初级线圈应利用7 V RMS的电压驱动。
该。
旋变编码器转换率计算公式在工程和科学领域中,转换率是一个非常重要的参数,它可以帮助我们了解某种设备或系统的性能和效率。
旋变编码器是一种常用的测量设备,它可以用来测量旋转物体的角度和速度。
在本文中,我们将讨论旋变编码器的转换率计算公式,以及如何使用这个公式来评估旋变编码器的性能。
旋变编码器的转换率计算公式可以用来计算旋转物体的角度和速度。
这个公式通常由旋变编码器的分辨率和输出信号的频率来确定。
分辨率是指旋变编码器能够测量的最小角度变化,通常以每转的脉冲数来表示。
输出信号的频率则是指旋变编码器输出信号的周期性,通常以赫兹(Hz)来表示。
旋变编码器的转换率计算公式可以表示为:转换率 = 分辨率×输出信号频率。
在这个公式中,转换率表示旋变编码器能够测量的角度变化率,单位通常为度/秒或者弧度/秒。
分辨率表示旋变编码器能够测量的最小角度变化,单位通常为脉冲/转。
输出信号频率表示旋变编码器输出信号的周期性,单位通常为赫兹(Hz)。
通过这个公式,我们可以看到旋变编码器的转换率与其分辨率和输出信号频率有关。
如果分辨率越高,那么旋变编码器就能够测量更小的角度变化,转换率也就越高。
同样,如果输出信号频率越高,那么旋变编码器就能够输出更多的信号,转换率也就越高。
在实际应用中,我们可以使用这个公式来评估旋变编码器的性能。
例如,如果我们需要测量一个旋转物体的角速度,我们可以选择一个分辨率高、输出信号频率高的旋变编码器,这样就能够获得更准确的测量结果。
另外,我们还可以通过调整旋变编码器的分辨率和输出信号频率来满足不同应用的需求,从而提高旋变编码器的性能和效率。
除了转换率计算公式之外,我们还需要注意一些其他因素对旋变编码器性能的影响。
例如,旋变编码器的安装位置、环境温度、供电电压等因素都会对其性能产生影响。
因此,在使用旋变编码器时,我们需要综合考虑这些因素,以确保能够获得准确和可靠的测量结果。
总之,旋变编码器的转换率计算公式可以帮助我们评估旋变编码器的性能和效率。
基于双通道旋转变压器的高精度测角系统设计崔建飞;孙凤鸣【摘要】为实现伺服电机驱动回旋机构应用中的角秒级的角度测量精度.选用电气误差小于±10″的无刷双通道旋转变压器作为角度位置传感器,设计了双通道旋转变压器的激励及解算电路,通过数字信号处理器(Digital SignalProcessor,DSP)TMS320F28335读取解算电路输出的角度位置.与传统的无刷双通道旋转变压器角度解算电路相比较,可以有效减少软件算法中数据整合和纠错部分的工作量.实验结果表明该系统能稳定输出高质量的角度位置指示信号.适用于伺服电机定位控制等需要高精度角度位置反馈的场合,具有可靠性高、精度高、软件开销少的优点.%The aim of this study was to implement high precision angel measurement of rotary device. Two speed resolver which electrical error is less than ± 10″ was utilized to as angle position angle. Powering and decoding circuits were designed for the two speed resolver. The angle information was then read by Digital Signal Processor (DSP)TMS320F28335. Compared with other decoding methods of two speed resolver,this study can reduce software consumption on data integration and error correction. The results we obtained demonstrate this system could output high quality angle position indication signal with features of high precision,high reliability and simply coding.【期刊名称】《电子设计工程》【年(卷),期】2018(026)011【总页数】5页(P136-139,144)【关键词】角度测量;双通道旋转变压器;双通道轴角数字转换模块;TMS320F28335【作者】崔建飞;孙凤鸣【作者单位】天津津航计算技术研究所天津300300;天津市航空电子综合显示控制重点实验室天津300300;天津津航计算技术研究所天津300300;中国民航大学中欧航空工程师学院,天津300300【正文语种】中文【中图分类】TN79+2在运动系统的精密控制领域,角度位置的测量至关重要,常用的角度位置传感器包括光电编码器[1]、霍尔传感器[2]、旋转变压器[3](以下简称旋变)等种类。

精密旋变数字转换器测量角位置和速度精密旋变数字转换器测量角位置和速度作者:Jakub Szymczak、Shane O’Meara、Johnny S. Gealon 和Christopher Nelson De La Rama简介旋变器和机电传感器可用来精确测量角位置,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。
旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统单元以及要求提供精确轴旋转的其他许多应用中。
旋变器在这些应用中可以长期耐受严苛条件,是恶劣环境下军用系统的完美选择。
标准旋变器的初级绕组位于转子上,两个次级绕组位于定子上。
而另一方面,可变磁阻旋变器的转子上无绕组,其初级和次级绕组均在定子上,但转子的凸极(裸露极点)将次级正弦变化耦合至角位置。
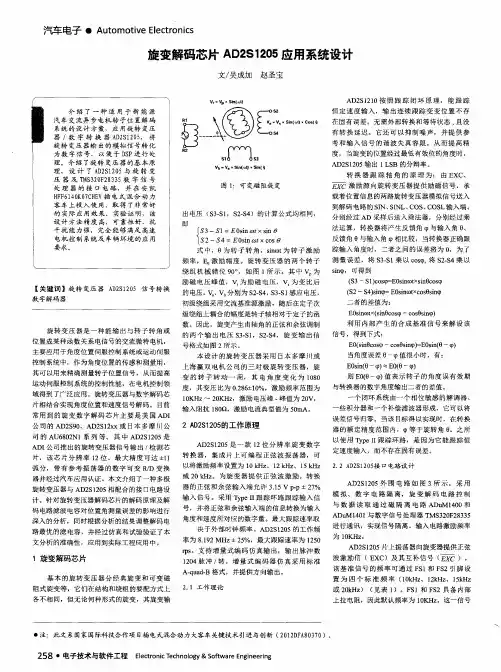
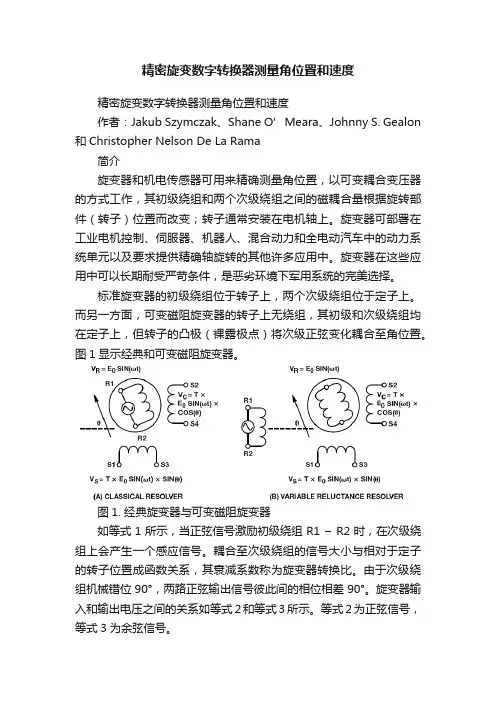
图1显示经典和可变磁阻旋变器。
图1. 经典旋变器与可变磁阻旋变器如等式1所示,当正弦信号激励初级绕组R1 –R2时,在次级绕组上会产生一个感应信号。
耦合至次级绕组的信号大小与相对于定子的转子位置成函数关系,其衰减系数称为旋变器转换比。
由于次级绕组机械错位90°,两路正弦输出信号彼此间的相位相差90°。
旋变器输入和输出电压之间的关系如等式2和等式3所示。
等式2为正弦信号,等式3为余弦信号。
(1)(2)(3)其中,θ是轴角,ω是激励信号频率,E0是激励信号幅度,T 是旋变器转换比。
两路输出信号由轴角的正弦和余弦信号调制。
激励信号以及正弦和余弦输出信号的图示如图2所示。
正弦信号在90°和270°时具有最大幅度,余弦信号在0°和180°时具有最大幅度。
图2. 旋变器电气信号示意图旋变器传感器有一组独特的参数,在设计时应予以考虑。
最重要的电气参数以及相关的典型规格汇总在表1中。
表1. 旋变器关键参数电气参数典型范围单位说明输入电压3–7 V rms 建议施加在旋变器初级绕组R1 – R2的激励信号幅度输入频率50–20,000 Hz 建议施加在旋变器初级绕组R1 –R2的激励信号频率转换比0.2–1.0 V/V 初级和次级绕组信号幅度比输入阻抗100–500 ?旋变器输入阻抗相移±25 度施加在初级绕组(R1 –R2)上的激励信号和次级绕组(S3 – S1,S2 – S4)上的正弦/余弦信号之间的相移极点对1–3 每次机械旋转的电气旋转数旋变数字转换器采用正弦波参考信号激励初级绕组会在次级绕组上产生两路电磁感应差分输出信号(正弦信号和余弦信号)。
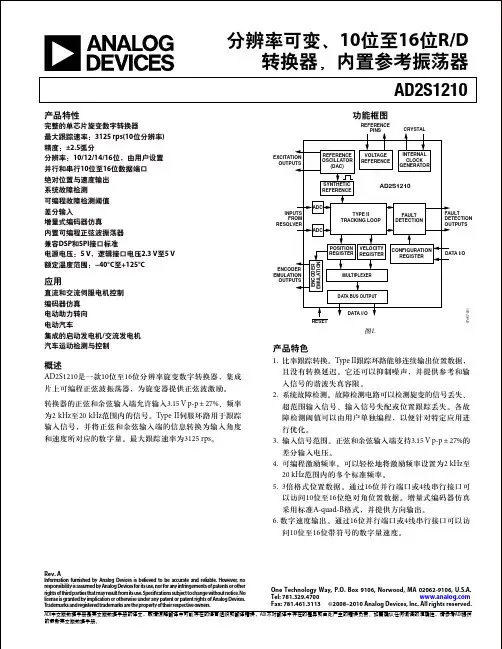
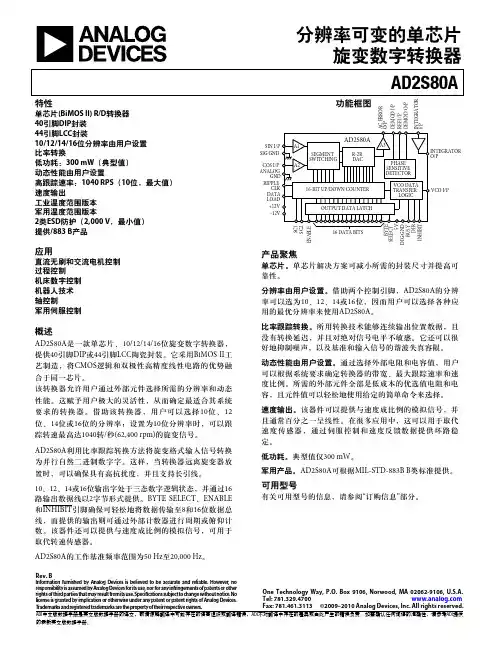
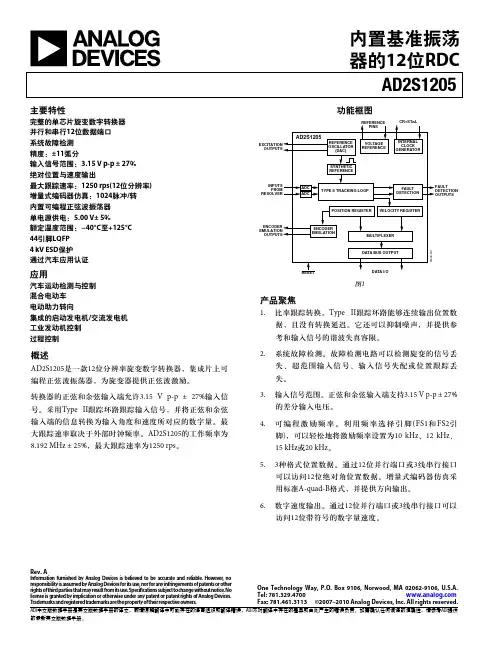
One Technology Way, P.O. Box 9106, Norwood, MA 02062-9106, U.S.A.Tel: 781.329.4700 Fax: 781.461.3113 ©2008–2010 Analog Devices, Inc. All rights reserved.功能框图REFERENCE OSCILLATOR(DAC)EXCITATION OUTPUTSAD2S1210E N C O D E R E M U L A T I O NSYNTHETIC REFERENCE RESETDATA I/OINPUTS FROM RESOLVERENCODER EMULATION OUTPUTSVOLTAGE REFERENCEREFERENCEPINSINTERNAL CLOCK GENERATORCRYSTALTYPE IITRACKING LOOP FAULT DETECTIONFAULTDETECTION OUTPUTSPOSITION REGISTERADCADCCONFIGURATIONREGISTERMULTIPLEXERDATA BUS OUTPUTDATA I/OVELOCITY REGISTER07467-001图1.AD2S1210分辨率可变、10位至16位R/D转换器,内置参考振荡器产品特性完整的单芯片旋变数字转换器最大跟踪速率:3125 rps(10位分辨率) 精度:±2.5弧分分辨率:10/12/14/16位,由用户设置 并行和串行10位至16位数据端口 绝对位置与速度输出 系统故障检测可编程故障检测阈值 差分输入增量式编码器仿真内置可编程正弦波振荡器 兼容DSP 和SPI 接口标准电源电压:5 V ,逻辑接口电压2.3 V 至5 V 额定温度范围:−40°C 至+125°C应用直流和交流伺服电机控制 编码器仿真 电动助力转向 电动汽车集成的启动发电机/交流发电机 汽车运动检测与控制概述AD2S1210是一款10位至16位分辨率旋变数字转换器,集成片上可编程正弦波振荡器,为旋变器提供正弦波激励。
AN13091电动车辆牵引电机功率逆变器控制参考平台第1版—2021年3月19日 应用笔记1 首字母缩略语2 概述恩智浦电动车辆功率逆变器控制参考平台提供硬件参考设计、系统基本软件和完整的系统功能安全支持,以此为基础可开发用于电动车辆的符合ASIL-D标准的完整、高压、大功率牵引电机逆变器。
该参考平台已被设计成一个评估原型,在320 V电源电压下运行时,它能提供150 kW峰值输出功率和96%以上的电气效率。
该硬件参考平台由4个板组成:•系统控制板-从IGBT过渡到SiC时,可使用同样的设计和元器件•功率级驱动板-GD3100可以用于驱动IGBT和SiC•电流传感器板•车辆接口板系统控制板:•该板包含3个关键的恩智浦集成电路。
-MPC5775E是一款32位Power Architecture©双核ASIL-D MCU,面向电机控制,提供高达264 MHz/内核的性能、CSE安全性、eTPU定时器、软件旋变器和高度可扩展的解决方案。
-FS6500系统基础芯片(SBC)为MCU供电,优化能耗并提供低压侧监测和保护。
-TJA1051收发器适用于汽车行业的高速CAN应用,为MPC5775E和CAN协议控制器提供差分发送和接收功能。
功率级驱动板:•此板专为Fuji M653 IGBT模块而设计。
它具有用于IGBT和SiC MOSFET的高级单通道栅极驱动器GD3100。
集成电流隔离和低导通电阻驱动晶体管提供高充电和放电电流、低动态饱和电压及轨到轨栅极电压控制。
该设备自主管理严重故障,并通过INTB引脚和SPI接口报告故障和状态。
栅极电压通过隔离变压器和反激控制器提供。
此套件设计为与额定800 A/750 V的Fuji M653 IGBT模块(从Fuji Electronics单独购买)的接口。
系统基本软件包括:•底层SDK设备驱动程序•软件开发抽象层•系统功能服务层,用于简化参考控制硬件上的定制电机控制应用软件开发可选:•AMMCLIB(高级电机控制函数库)•平台功能安全管理库(2021年第三季度上线)恩智浦特色器件•GD3100隔离式高压IGBT/SiC栅极驱动器,<2 μs短路保护•MPC5775E高级电机控制ASIL-D MCU•FS65稳健的ASIL-D安全PMIC,具有故障静默和0等级能力•TJA1051T/3冗余高速CAN总线接口特性和功能安全优势•用于100 kW级功率逆变器的系统控制三相设计套件•为ASIL-D安全要求设计的高效系统BOM•高度优化的基础软件支持,提供逆变器服务层、驱动程序和SDK•±0.1°高精度软件旋变数字转换器(RDC),利用先进的电机控制软件消除用于角度和速度计算的外部硬件接口。
AD2S1210在气象雷达中的应用刘仁贵;李伟华;党建林;马胜毅;侯成英【摘要】气象雷达在运行的过程中,定点控制的精度对气象预报的准确性具有重要的影响.针对气象雷达在运行的过程中精确定位的需要,在气象雷达的伺服控制系统中,采用2片16位高精度的旋变数字转换器AD2S1210分别作为方位角和俯仰角的解码器,用于采集方位旋转变压器和俯仰旋转变压器输出的角度信号,并结合PID 控制算法,使气象雷达在定点运动的过程中,其俯仰角定位误差不大于0.01°,方位角定位误差不大于0.02°,且整体运行平稳.实验结果表明AD2S1210的性能非常优良.【期刊名称】《电子设计工程》【年(卷),期】2018(026)014【总页数】6页(P130-134,139)【关键词】气象雷达;AD2S1210;角度解码器;伺服控制;旋转变压器【作者】刘仁贵;李伟华;党建林;马胜毅;侯成英【作者单位】西北工业大学明德学院陕西西安710124;西北工业大学明德学院陕西西安710124;西北工业大学明德学院陕西西安710124;陕西捷普控制技术有限公司陕西西安712000;西安晨曦航空科技股份有限公司陕西西安710077【正文语种】中文【中图分类】TN492气象雷达是用于探测天气的雷达,气象雷达在工作的过程中,有时需要对特定的空间区域进行反复扫描,实时跟踪特定云系的变化和走向,以提高预报的准确性。
因此,在气象雷达运动控制系统中,需要对方位和俯仰的角度位置实时解码,并精确定点到某个特殊的角度,否则容易造成前后扫描云图的重合性变差。
旋转变压器(旋变)[1]的定子和转子是分开安装的,为非接触式结构,结构简单,坚固耐用,维护方便,对机械和电气噪音不敏感,抗干扰能力好,具有很高的可靠性,因此广泛应用于各种条件恶劣环境下的角度测量。
由于旋变的输入端是具有一定频率的交流励磁电压[2],输出端也是模拟量信号。
在用旋变进行角度测量时,需要为其产生励磁信号并将旋变输出的模拟量变换成表示角度的数字信号的解码器。
dsadc模块在旋变中的应用随着科技的不断发展,人们对于旋变技术的需求也越来越高。
旋变技术可以将一种物体或信号转换成另一种物体或信号,广泛应用于工业生产、通信、医疗等领域。
而在旋变技术中,dsadc模块的应用显得尤为重要。
dsadc模块是一种数字序列化模数转换器,能够将模拟信号转换成数字信号。
它的应用范围非常广泛,可以用于音频、视频、通信等多个领域。
在旋变中,dsadc模块的应用主要体现在以下几个方面。
dsadc模块可以用于旋转传感器的信号采集。
旋转传感器是一种用于测量物体旋转角度的传感器,常见的有光电传感器、磁电传感器等。
在传统的旋转传感器中,信号是以模拟形式输出的,需要经过AD转换才能得到数字信号。
而使用dsadc模块,可以直接将模拟信号转换成数字信号,简化了电路结构,提高了信号的稳定性和精确度。
dsadc模块可以用于旋转编码器的信号处理。
旋转编码器是一种用于测量旋转运动的装置,常见的有光电编码器、磁电编码器等。
旋转编码器的输出信号是一系列脉冲,通过对脉冲的计数和计时可以得到旋转角度。
使用dsadc模块,可以将脉冲信号转换成数字信号,方便后续的处理和分析。
dsadc模块还可以应用于旋转电位器的控制。
旋转电位器是一种用于调节电阻值的装置,常见的有可变电阻、电位器等。
在一些需要精确控制的场合,常常需要将旋转电位器的输出信号转换成数字信号,方便进行计算和处理。
使用dsadc模块,可以将旋转电位器的模拟信号转换成数字信号,实现精确控制和调节。
dsadc模块还可以应用于旋转机械的故障检测。
在一些旋转机械中,如风力发电机、汽车引擎等,通过监测旋转角度和旋转速度可以判断机械的工作状态和故障情况。
使用dsadc模块,可以将旋转角度和旋转速度的模拟信号转换成数字信号,方便进行故障检测和预警。
dsadc模块在旋变中的应用非常广泛。
它可以用于旋转传感器的信号采集、旋转编码器的信号处理、旋转电位器的控制以及旋转机械的故障检测等方面。
旋变二次谐波测角误差自校正王英广;张激扬;张强;鲁明;田利梅【期刊名称】《光学精密工程》【年(卷),期】2024(32)2【摘要】旋变幅值误差和正交误差在角速度频谱上表现为旋变转频的二次谐波,是旋变测角误差的主要来源,影响伺服系统角速度控制精度和稳定度。
本文提出了一种基于特征频率参考的二次谐波误差自校正方法。
首先,分析旋变测角误差产生的机理,获知其幅值误差和正交误差的互不相关性,并证明对旋变输出信号进行幅值调整和相位差调整可实现二次谐波误差校正。
然后,在旋变和旋变数字信号转换器(Resolver-to-Digital Converter,RDC)之间设计基于比例放大的幅值校正器和基于交叉调节的相角校正器。
最后,根据误差信号在线性控制系统中特征频率不变的特性,对伺服系统进行匀速控制,以角速度频谱中二次谐波频率的幅值为参考基准,分别调整幅值校正器和相角校正器,校正二次谐波误差。
实验结果表明:本方法可将旋变二次谐波测角误差幅值降低78.5%,伺服系统速率波动量降低40.5%。
本方法实现了旋变二次谐波测角误差的自校正,大幅提升了旋变的测角精度和伺服系统的转速控制稳定度。
【总页数】9页(P184-192)【作者】王英广;张激扬;张强;鲁明;田利梅【作者单位】北京控制工程研究所【正文语种】中文【中图分类】TP394.1;TH691.9【相关文献】1.调速用旋变编码器误差分析与校正2.利用误差谐波补偿法提高金属圆光栅测角精度3.一种基于坐标变换的测角误差校正算法4.旋转变压器-感应同步器双通道测角系统一次谐波误差补偿5.基于d轴电流误差的永磁同步电机旋变误差角识别方法因版权原因,仅展示原文概要,查看原文内容请购买。
精密旋变数字转换器测量角位置和速度作者:Jakub Szymczak、Shane O’Meara、Johnny S. Gealon和Christopher Nelson De La Rama简介旋变器和机电传感器可用来精确测量角位置,以可变耦合变压器的方式工作,其初级绕组和两个次级绕组之间的磁耦合量根据旋转部件(转子)位置而改变;转子通常安装在电机轴上。
旋变器可部署在工业电机控制、伺服器、机器人、混合动力和全电动汽车中的动力系统单元以及要求提供精确轴旋转的其他许多应用中。
旋变器在这些应用中可以长期耐受严苛条件,是恶劣环境下军用系统的完美选择。
标准旋变器的初级绕组位于转子上,两个次级绕组位于定子上。
而另一方面,可变磁阻旋变器的转子上无绕组,其初级和次级绕组均在定子上,但转子的凸极(裸露极点)将次级正弦变化耦合至角位置。
图1显示经典和可变磁阻旋变器。
图1. 经典旋变器与可变磁阻旋变器如等式1所示,当正弦信号激励初级绕组R1 – R2时,在次级绕组上会产生一个感应信号。
耦合至次级绕组的信号大小与相对于定子的转子位置成函数关系,其衰减系数称为旋变器转换比。
由于次级绕组机械错位90°,两路正弦输出信号彼此间的相位相差90°。
旋变器输入和输出电压之间的关系如等式2和等式3所示。
等式2为正弦信号,等式3为余弦信号。
(1)(2)(3)其中,θ是轴角,ω是激励信号频率,E0是激励信号幅度,T 是旋变器转换比。
两路输出信号由轴角的正弦和余弦信号调制。
激励信号以及正弦和余弦输出信号的图示如图2所示。
正弦信号在90°和270°时具有最大幅度,余弦信号在0°和180°时具有最大幅度。
图2. 旋变器电气信号示意图旋变器传感器有一组独特的参数,在设计时应予以考虑。
最重要的电气参数以及相关的典型规格汇总在表1中。
表1. 旋变器关键参数电气参数典型范围单位说明输入电压3–7 V rms 建议施加在旋变器初级绕组R1 – R2的激励信号幅度输入频率50–20,000 Hz 建议施加在旋变器初级绕组R1 – R2的激励信号频率转换比0.2–1.0 V/V 初级和次级绕组信号幅度比输入阻抗100–500 Ω旋变器输入阻抗相移±25 度施加在初级绕组(R1 – R2)上的激励信号和次级绕组(S3 – S1,S2 – S4)上的正弦/余弦信号之间的相移极点对1–3 每次机械旋转的电气旋转数旋变数字转换器采用正弦波参考信号激励初级绕组会在次级绕组上产生两路电磁感应差分输出信号(正弦信号和余弦信号)。
旋变数字转换器(RDC)在旋变器和系统微处理器之间实现接口,采用这些正弦和余弦信号解码电机轴的角位置和旋转速度。
大部分RDC使用Type-II跟踪环路计算位置和速度。
Type-II 环路采用二阶滤波器,确保静止或恒定速度输入信号的稳态误差为零。
RDC对两路输入信号进行同步采样,为跟踪环路提供数字化数据。
使用这类环路的RDC最新实例,是ADI的完整10位至16位跟踪转换器AD2S1210,其片内可编程正弦振荡器提供初级绕组的激励信号。
如表1所示,典型旋变器需要一个低阻抗的3 V rms至7 V rms信号,才能驱动初级绕组。
RDC采用5 V电源供电,提供典型值为7.2 V p-p差分信号的激励输出。
该信号的幅度和驱动能力无法满足旋变器的输入规格。
此外,旋变器最高可将信号衰减5倍,因此旋变器输出幅度不符合RDC输入幅度要求,如表2所示。
对此问题的一种解决方案是使用差分放大器增压初级端的正弦信号。
该放大器必须要能够驱动低至100 Ω的负载。
常见的做法是以大信号驱动初级端,以获得良好的信噪比。
随后,便能以电阻分压器衰减输出正弦和余弦信号。
在很多工业和汽车应用中,噪声环境下使用RDC会使正弦和余弦线路上感应高频噪声。
为了解决这一问题,应尽可能靠近RDC放置一个简单的差分低通滤波器。
图3显示集成放大器和滤波器的典型旋变数字转换器接口。
图3. 典型旋变系统框图工作原理图4显示RDC的工作框图。
转换器通过产生一个输出角ϕ连续跟踪轴角θ,然后将其反馈并与输入角进行比较。
当转换器跟踪位置时,两个角度之间的误差最小。
图4. AD2S1210工作原理图为了测量误差,将正弦和余弦输入分别乘以cos(ϕ)和sin(ϕ):(4)(5)然后,求两者之差:(6)最后,使用内部产生的合成基准解调信号:(7)对于较小的角度误差(θ – ϕ),运用三角恒等式E0 (sin θ cos ϕ – cos θ sin ϕ) = E0 sin (θ – ϕ),即大致等于E0 (θ – ϕ)。
E0(θ – ϕ)是转子角度误差和转换器数字角度输出之差。
Type-II跟踪环路消除了误差信号。
完成该操作后,ϕ等于旋转角θ。
RDC重要参数选择合适的器件之前,工程师必须考虑表征旋变数字转换器的一系列参数。
表2显示AD2S1210的RDC重要参数和规格,这些参数和规格奠定了同类一流转换器的基础。
表2. AD2S1210的RDC重要参数和数值参数典型值单位说明输入电压 2.3–4.0 V p-p 正弦和余弦输入的差分信号范围锁相范围±44 度RDC产生的激励信号与正弦和余弦输入之间的相移角度精度±2.5 弧分RDC角度精度分辨度10, 12, 14, 16 位RDC分辨率速度精度 2 LSB RDC提供的速度精度跟踪速率3125, 1250, 625, 156 rps 特定分辨率下的跟踪能力建立时间 2.2, 6, 14.7, 66 ms 特定分辨率下针对179°步进变化的转换器响应时间误差源完整系统的精度由RDC精度,以及旋变器、系统架构、线缆、激励缓冲器和正弦/余弦输入电路的误差所确定。
最常见的系统误差来源是幅度失配、信号相移、失调和加速。
幅度失配是正弦和余弦信号达到峰值幅度(余弦为0°和180°,正弦为90°和270°)时,它们的峰峰值幅度之差。
失配可以是旋变器绕组的变化产生的,也可以是旋变器和RDC 正弦/余弦输入之间的增益产生的。
等式3可以重新改写为:(8)其中,δ是余弦信号相对于正弦信号的幅度失配百分比。
静态位置误差ε以弧度表示,定义如下:(9)等式9显示幅度失配误差以转速的两倍振荡,δ/2最大值等于45°的奇数倍,并且在0°、90°、180°和270°时无误差。
对于12位RDC而言,0.3%幅度失配将产生大约1 LSB的误差。
RDC可接受来自旋变器的差分正弦和余弦信号。
旋变器移除载波上的所有直流分量,因此必须添加一个V REF/2直流偏置,以确保对于RDC而言,旋变器输出信号在正常工作范围内。
SIN和SINLO输入或COS和COSLO输入之间的任何直流偏置失调都会引起额外的系统误差。
在正弦和余弦信号载波相互反相的象限内,共模失调引起的误差更严重。
当位置范围为90°至180°,以及270°至360°时,就会出现这种情况,如图5所示。
两端点之间的共模电压会使差分信号产生两倍于共模电压的失调。
RDC是比率式的,因此输入信号幅度感知变化会导致位置产生误差。
图5. 旋变器象限图6显示哪怕正弦和余弦信号的差分峰峰值幅度相等,输入信号的感知幅度也有所不同。
在135°和315°时,误差最大。
在135°时,理想系统中A = B,但存在失调时A ≠ B,因此产生了感知幅度失配。
图6. 直流偏置失调误差的另一个来源是差分相移,即旋变器正弦和余弦信号之间的相移。
受耦合影响,所有旋变器上都会出现一些差分相移。
只要存在微小的旋变残余电压或正交电压,即表示出现较小的差分相移。
如果正弦和余弦信号线路的电缆长度不等,或者驱动不同的负载,也会产生相移。
余弦信号相对正弦信号的差分相位可以表示为:(10)其中,α是差分相移。
求解α引起的误差,便可得到误差项ε:(11)其中,α和ε的单位为弧度。
大部分旋变器还会在激励参考信号和正弦/余弦信号之间产生相移,导致额外的误差ε:(12)其中,β是正弦/余弦信号和激励参考信号之间的相移。
通过选择具有较小残余电压的旋变器、确保正弦和余弦信号采取完全相同的处理方式并消除参考相移,则可将此误差降至最小。
相比Type-I 环路,Type-II 跟踪环路的优势是恒定速度下不会产生位置误差。
然而,哪怕在完美平衡的系统中,加速度也会产生误差项。
加速度产生的误差量由控制环路响应确定。
图8显示AD2S1210的环路响应。
在静态工作条件下,激励基准信号和信号线之间的相移不会影响转换器精度,但由于转子阻抗和目标信号的无功分量,运动中的旋变器会产生速度电压。
速度电压位于目标信号象限内,它仅在运动时产生,在静态角度下并不存在。
其最大幅度为:(13)在实际旋变器中,转子绕组同时含有无功和阻性分量。
当转子存在速度但又处于静止状态时,阻性分量会在参考激励中产生非零相移。
激励的非零相移与速度电压共同导致跟踪误差,可近似计算如下:图8. AD2S1210环路响应环路加速度常数K a 可以表示为:(14)(15)为了补偿旋变器参考激励和正弦/余弦信号之间的相位误差,AD2S1210采用内部滤波后的正弦和余弦信号来合成与参考频率载波相位一致的内部参考信号。
它通过确定正弦或余弦(取较大者,以改善相位精度)的过零并评估旋变器参考激励相位,便可降低参考信号和正弦/余弦输入信号之间的相移至10°以内,并在±44°相移情况下工作。
合成参考模块的框图如图7所示。
其中,环路系数随分辨率、输入信号幅度和采样周期的变化而改变。
AD2S1210在每个CLK IN 周期中进行两次采样。
加速度产生的跟踪误差便可计算如下:(16)图9显示不同分辨率设置下的角度误差与加速度的关系。
图7. 合成参考图9. 角度误差与加速度的关系表3. RDC 系统响应参数 参数 说明 10位分辨率12位分辨率14位分辨率16位分辨率k1 ADC 增益 输入电压/基准电压 = (3.15/2)/2.47(标称值) k2 误差增益 12π × 106 36π × 106 164π × 106 132π × 106 a补偿器 零点系数8187/81924095/40968191/819232,767/32,768b补偿器 极点系数509/5124085/409616,359/16,38432,757/32,768c 积分器增益 1/220 1/2221/2241/226T采样周期1/(CLK IN /2)输入滤波器为获得最佳的系统精度,可将旋变器输出直接连接至AD2S1210 SIN、COS、SINLO和COSLO引脚,减少失配或相移。