旋转变压器与数字输出转换器
- 格式:pdf
- 大小:214.09 KB
- 文档页数:9

微特电机及系统答案【篇一:微特电机试卷】(a)增高电压(b)增大电流(c)增加通电相数2.交流异步伺服电动机相对于普通的异步电动机,异步伺服电动机具有:( b )(a)电流、电压较高(b)较大的转子电阻(c)功率比普通电机大3.多台自整角接收机并联起来使用可以将同一转角信号传输到几个不同的地点,但必须限制并联台数,否则就会:( a )(a)降低系统精度(b)多消耗电能(c)发送带不起来4.直流电动机采用降低电源电压的方法起动,其目的是:(b)(a)为了使启动过程平稳(b)为了减小起动电流(c)为了起动转矩二.填空1.直流伺服电动机有(磁极控制)和(电枢控制)两种控制方式,其中以(电枢控制)应用较多。
2.根据转子结构特点,交流同步伺服电动机可分为(永磁式)(磁阻式)和(磁滞式)三种。
3.在电机转子体积、电枢电流、电流密度和气隙磁通密度相同的条件下,电枢直径增大1倍,电磁转矩也增大( 1 )倍。
4.表征异步测速发电机性能的主要技术指标有(线性误差)(相位误差)和(剩余误差)。
5.测速发电机在自动控制系统中是一个非常重要的原件,它可作为(测量元件)(校正元件)(阻尼元件)、解算元件和角加速度信号元件等。
6.反应式步进电动机的工作原理是建立在磁力线力图通过磁阻最小的路径,产生(反应转矩)来驱动转子转动。
7.自整角机必须成对或成组使用,主令轴上装得是(自整角发送机),从动轴上装的是(自整角接收机)。
8.旋转变压器在结构上与绕线式异步电动机相似,定、转子均为(隐级结构),并分别放置两相(正交绕组)。
9.无刷直流电动机使用(功率电子开关)及(位置传感器)代替传统直流电动机的(电刷)和(换向器)。
10.开关磁阻电机的基本控制方法是(电流斩波控制)和(角位置控制)。
前者适用于(低速)运行,后者适用于(高速)运行。
三.判断2.异步伺服电动机当控制电压发生变化时,电机转速也发生相应变化,因而达到控制转速的目的。
(√)4.在使用异步测速发单机时,电机的工作转速不应超过规定的转速范围。
旋转变压器—数字转换器AD2S83 在伺服系统中的应用作者:北京装甲兵工程学院控制工程系(100072)李年裕吕强李光升谢永成来源:《电子技术应用》摘要:介绍了旋转变压器-数字转换器AD2S83在伺服系统中的应用,重点介绍了该器件与主控芯片DSP(TMS320F240)的接口电路设计。
关键词:伺服系统旋转变压器-数字转换器在伺服系统中,需要实时地检测出电机转子的位置,包括转子的绝对位置和增量式位置,同时还需检测出电机的速度,以实现对电机的转矩、速度、及其驱动的机构的位置的高精度控制。
在电机转子位置的检测中,旋转变压器由于其具有坚固耐用,能够提供高精度的位置信息等突出优点,而获得越来越广泛的应用。
由于旋转变压器的输出是包含着位置信息的模拟信号,需对其处理并将其转化成对应的包含着位置信息的数字量,才能与单片机或DSP等控制芯片接口。
这就需要设计相应的信号转换电路或者使用专用的旋转变压器—数字转换器来实现,后者由于有功能强、可靠性高、使用方便等优点而被广泛采用。
笔者在最近开发的基于DSP的数字式伺服系统中,选用了美国AD公司的旋转变压器-数字转换器AD2S83,实现了电机位置信号实时检测的数字化,取得了满意的效果。
1 AD2S83芯片简介1.1 AD2S83芯片引脚功能介绍AD2S83芯片引脚功能描述见表1。
1.2 AD2S83芯片的特点AD2S83芯片是AD公司生产的跟踪式旋转变压器-数字转换器(R/D转换器),它具有以下特点:(1)允许用户自己选择适合的的分辨率。
AD2S83提供有10位、12位、14位或16位的分辨率,用户可根据需要,通过外围器件的不同连接选用不同的分辨率。
(2)通过三态输出引脚输出并行的二进制码来表征位置信息,因而很容易与单片机或DSP 等控制芯片接口。
(3)采用比率跟踪转换方式,使之能连续输出位置数据而没有转换延迟并具有较强的抗干扰能力和远距离传输能力。
(4)用户可通过外围阻容元件的选择,改变转换的动态性能,如带宽、最大跟踪速率等。
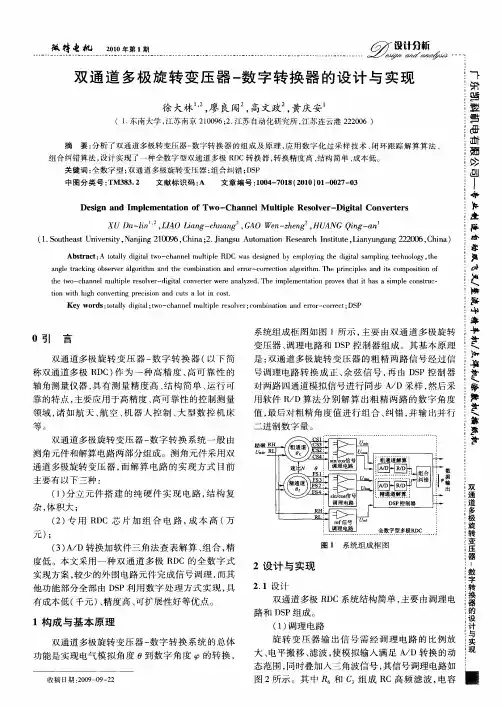
基于AU6802N1的旋转变压器信号接口电路的设计和应用摘要:本文在越野电动车交流传动系统中采用旋转变压器实现了异步电机转子位置信号的精确测量,并且设计了基于RDC芯片AU6802N1的旋转变压器位置信号的接口电路。
关键词:位置传感器;旋转变压器;AU6802N1;正交编码脉冲引言旋转变压器是一种模拟型机电元件,为了满足交流传动系统数字化控制的要求,就需要一定的信号接口电路,以实现其模拟信号与控制系统数字信号之间的相互转化,这类接口电路是一类特殊的ADC,也就是所谓的旋转变压器/数字转换器(RDC) 。
日本多摩川公司生产的R/D转换芯片AU6802N1可以方便地将旋转变压器的轴角位移信号(模拟信号)转换为控制系统所需要的数字信号,并具有多种标准信号输出模式,且使用简单、成本低、可靠性高。
本文介绍了AU6802N1的功能特性、位置检测信号的输出模式,并利用AU6802N1设计了旋转变压器位置信号测量的外围接口电路,将其应用于越野电动车交流传动控制系统中,实现了对50kW 4对极交流异步电机转子位置信号的精确测量。
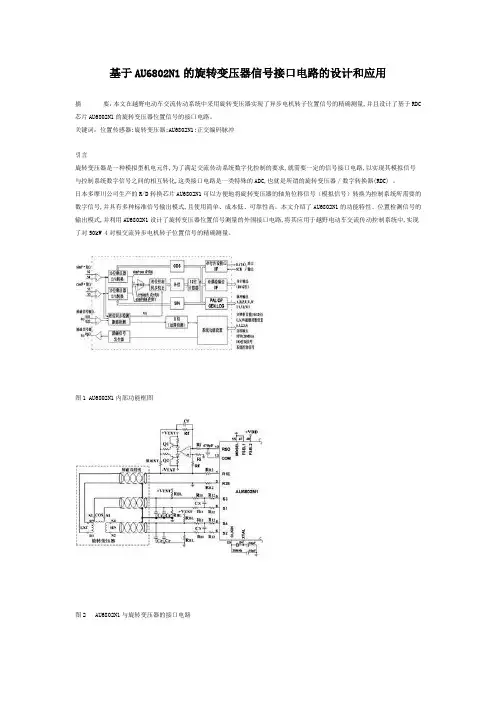
图1 AU6802N1内部功能框图图2 AU6802N1与旋转变压器的接口电路图3 系统试验框图AU6802N1简介AU6802N1的内部功能如图1所示。
提供给旋转变压器的励磁信号由芯片内部产生并通过RSO口输出,其频率可以设置为10/20kHz。
由旋转变压器输出的转速正弦信号和余弦信号分别通过S2-S4,S1-S3口输入,再经10位乘法器与反馈转速的数字跟踪量相乘,产生的信号再通过比较器和相位补偿及同步校正处理后,得到所需转速的精确数字量。
转速输出模式可通过外部引脚FSEL1和FSEL2设置,转速的数字量以脉冲形式、并行输出形式、并行总线形式、SPI形式来传递给数字信号处理器。
该芯片内部还具有故障自检,信号线断路检测及相位同步检测等功能。
AU6802N1采用TQFP-52封装,大小仅为10.0×10.0×1.0mm3,工作温度范围为-40~125℃。
旋转变压器(重点在于输入输出的关系)伺服传感器按被测量分类:位移传感器、速度传感器、加速度传感器、电流传感器。
位移传感器、速度传感器、加速度传感器各有直线和旋转角度的两种方式。
(1)旋转变压器概述⒈⒈旋转变压器的发展旋转变压器用于运动伺服控制系统中,作为角度位置的传感和测量用。
早期的旋转变压器其输出,是随转子转角作某种函数变化的电气信号,通常是正弦、余弦、线性等。
作为角度位置传感元件,常用的有这样几种:光学编码器、磁性编码器和旋转变压器。
由于制作和精度的缘故,磁性编码器没有其他两种普及。
光学编码器的输出信号是脉冲,由于是天然的数字量,数据处理比较方便,因而得到了很好的应用。
早期的旋转变压器,由于信号处理电路比较复杂,价格比较贵的原因,应用受到了限制。
因为旋转变压器具有无可比拟的可靠性,以及具有足够高的精度,在许多场合有着不可代替的地位,特别是在军事以及航天、航空、航海等方面。
和光学编码器相比,旋转变压器有这样几点明显的优点:①无可比拟的可靠性,非常好的抗恶劣环境条件的能力;②可以运行在更高的转速下。
(在输出12 bit的信号下,允许电动机的转速可达60,000rpm。
而光学编码器,由于光电器件的频响一般在200kHz以下,在12 bit时,速度只能达到3,000rpm);③方便的绝对值信号数据输出。
⒈⒉旋转变压器的应用这些年来,随着工业自动化水平的提高,随着节能减排的要求越来越高,效率高、节能显著的永磁交流电动机的应用,越来越广泛。
而永磁交流电动机的位置传感器,原来是以光学编码器居多,但这些年来,却迅速地被旋转变压器代替。
可以举几个明显的例子,在家电中,不论是冰箱、空调、还是洗衣机,目前都是向变频变速发展,采用的是正弦波控制的永磁交流电动机。
目前各国都在非常重视的电动汽车中,电动汽车中所用的位置、速度传感器都是旋转变压器。
例如,驱动用电动机和发电机的位置传感、电动助力方向盘电机的位置速度传感、燃气阀角度测量、真空室传送器角度位置测量等等,都是采用旋转变压器。
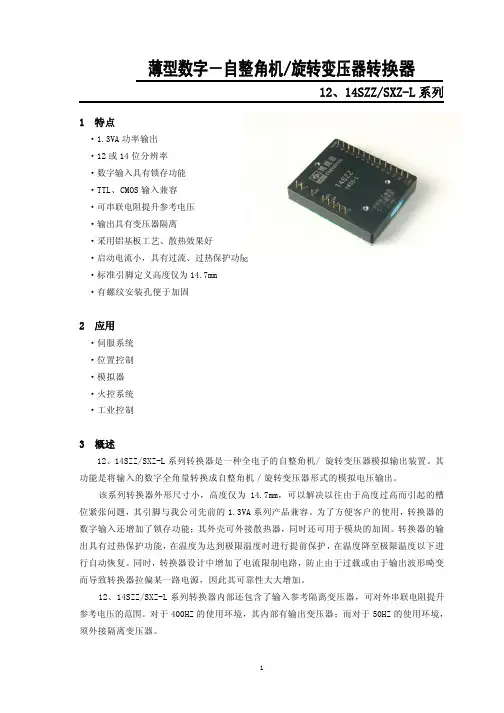
1特点·BCD 码输出·内部微型变压器,适用于50Hz、400Hz ·可用外部电阻适配较高电压的传感器信号2应用·直观显示角度信息·需要直接BCD 码输入的系统·天线监视·工业控制等3概述14、18位分辨率的自整角机及旋转变压器到BCD 码系列转换模块,采用典型二阶伺服回路,使输出的BCD 码连续跟踪输入角。
一般用于工业或军事应用领域,可直观显示角度数字或为需要BCD 码操控的系统提供BCD 码数字角度。
输入信号为三线的自整角机或四线正余弦旋转变压器信号(另加上两线参考信号),输出为并行4段或5段BCD 码数字量。
4工作原理原理框图如图1所示图1原理框注:自整角机信号时无S4引脚对自整角机一数字转换器来说,三线自整角机信号经过转换器内部的Scott 变压器对变换成正余弦旋转变压器形式:V1=KEoSinωtSinθV2=KEoSinωtCosθθ在这里代表了自整角机的轴角。
对正余弦旋转变压器一数字转换器来说,正余弦旋变信号的输出直接与S1、S2、S3和S414、18ZSZ/XSZ-BCD 系列自整角机/旋转变压器-BCD 码转换器输出相连,内部的微型变压器仅仅相当于起隔离和变压作用。
为了理解转换过程,那么我们假设当前可逆计数器的数字状态为φ,那么V 1乘以Cosφ,V 2乘以Sinφ得到:KE 0SinωtSinθCosφ和KE 0SinωtCosθSinφ这些信号经过误差放大器相减得到:KE 0Sinωt(SinθCosφ-CosθSinφ)即KEoSinωtSin(θ-φ)经相敏检测器、积分器、压控振荡器和可逆计数器形成一个闭环系统使Sin (θ-φ)趋近于零。
这样,在转换器的额定精度范围内,可逆计数器的数字φ就等于自整角机的模拟轴角θ。
可逆计数器输出的二进制数字编码φ,再由二/十进制转换变成十进制的BCD 码角度信息输出。
摘要:介绍一种用于高速永磁同步电动机控制的转子位置检测方法,该方法采用旋转变压器/数字转换器AU6802N1,将旋转变压器输出的模拟信号转化为数字位置信号。
设计了AU6802N1与旋转变压器和TMS320F2812之间的接口电路,并提出了一种具有较强容错性的位置信号数字处理方法,试验表明,该方案能够准确地实现电机位置和速度的检测。
关键词:旋转变压器,AU6802N1,接口电路,数字信号处理器在采用磁场定向控制的永磁同步电动机调速系统中,需要实时地检测电机转子位置及转速,以实现转矩、速度的闭环控制。
通常的检测方法是使用光电编码器,而常用的正交光电编码器起动时需要一段时间进行转轴定位,而且抗冲击震动性差,因此在需要快速响应的高速运行且对抗震要求较高的场合,往往使用旋转变压器。
旋转变压器的输出是含位置信息的模拟信号,需要将其转换为数字信号才可输入到单片机或DSP等控制芯片。
本文采用多摩川公司的旋转变压器数字转换器AU6802N1将模拟位置信号转换成12位数字位置信号, 同时采用TMS320F2812作主控CPU,可满足系统对转子位置与速度信号实时快速检测和处理的要求。
实验表明该方案确实可行,并具有较高的控制精度。
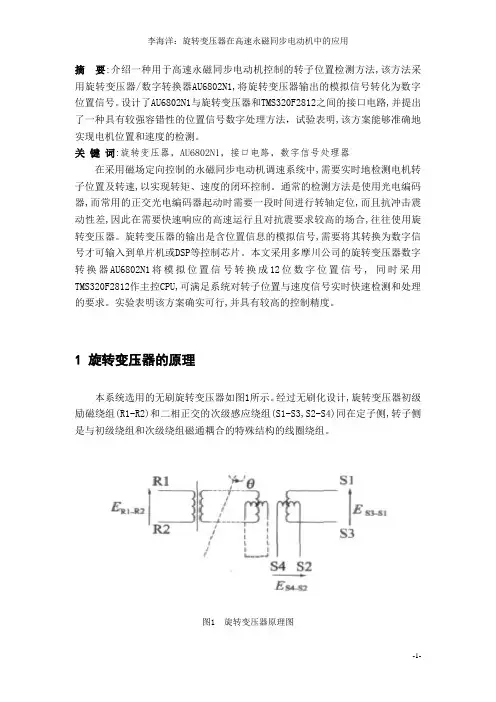
1 旋转变压器的原理本系统选用的无刷旋转变压器如图1所示。
经过无刷化设计,旋转变压器初级励磁绕组(R1-R2)和二相正交的次级感应绕组(S1-S3,S2-S4)同在定子侧,转子侧是与初级绕组和次级绕组磁通耦合的特殊结构的线圈绕组。
图1旋转变压器原理图当旋转变压器转子随电机同步旋转、初级励磁绕组外加交流励磁电压后,次级两输出绕组中便会产生感应电势,大小为励磁与转子旋转角的正、余弦值的乘积。
旋转变压器输入输出关系如下:ER1-R2=E0sinωtES1-S3=KER1-R2sinθES2-S4=KER1-R2cosθ式中:E0——励磁最大幅值;ω——励磁角频率;K——旋转变压器变比;θ——转子旋转角度。
旋转变压器工作原理及其应用于自动控制的实例分析摘要:旋转变压器是一种高分辨率的角度传感器。
本文在介绍旋转变压器工作原理之外,对以AD2S1200 为核心的数字解码电路系统和基于现场可编程门阵列(FPGA)的多通道旋转变压器测角系统的两个实例进行了简单分析。
通过学习研究人员实验和理论相结合后得到的方案检验结果和误差来源判断,对于旋转变压器的功能和应用的理解有所开拓,并提供了创新的思路。
关键词:旋转变压器角度传感器解码电路 FPGA 测角系统1 旋转变压器工作原理1.1基本原理旋转变压器是一种输出电压随转子转角变化的信号元件。
当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算和角度数据传输,也可以作为两相移相器用在角度-数字转换装置中。
如图1 所示,R1、R2为旋转变压器的激励端口,S1、S2为旋转变压器的正弦信号输出端口,S3、S4为旋转变压器的余弦信号输出端口。
当在初级激励绕组端口R1、R2加上1个正弦激励信号时,在次级绕组上将产生一对感应信号。
设转子R1—R2 激磁绕组施加的激磁电压为:则定子S1—S2、S3—S4 之间的正、余弦输出绕组输出电压分别为:式( 3)中Um为正、余弦绕组感应交流电势的振幅值,θ 为余弦绕组轴线S3—S4 与转子激磁绕组轴线R1—R2 之夹角,即被测转轴量旋转的角度信息。
求解θ 典型的处理方法是将式( 2)、式( 3)相除得表达式( 4),即:式( 4)可以求出式( 5)0°≤θ≤90° 的反正切转角值,即:1.2 旋转变压器结构与分类旋转变压器是一种可变化的耦合變压器,其初级线圈绕组和2个次级线圈绕组之间的磁耦合成度根据转子的位置而改变,转子通常安装在电机轴上。
标准旋转变压器的初级激励绕组固定在转子上,2个次级绕组固定在定子上。
旋转变压器用高精度编码器的设计旋转变压器是理想的角度检测元件之一,结构简单、坚固,体积较小,对工作环境要求不高,抗干扰能力较强,但其测角精度不太高,一般为角分数量级,往往会限制它的应用。
为此,这里提出一种数字式补偿方案,可将原来测角精度提高4倍左右,即由13位数字精度(二进制)(0级品)补偿成15位数字精度(二进制)。
补偿原理1. 1非接触式正余弦旋转变压器这里使用的非接触式正余弦旋转变压器是专门为某产品研制,其有关参数如下励磁电压:2V励磁频率:2k Hz变比:1电气误差:标准规定±3′零位误差:标准规定±3′。
1. 2旋转变压器―数字量转换器(RDC)这里使用的旋转变压器―数字量转换器是美国公司生产的集成电路芯片,它是40脚双列直插陶瓷封装,采用BiM OS工艺,用户根据测。
需要可以将它设置成10位、12位、14位或16位数字精度工作方式。
另外,还可以获得一个与实际转速成比例的模拟电压信号,并且当使用10位数字精度时,可测速度达到62400 rpm,这为速度闭环控制创造了条件。
1. 3励磁信号旋转变压器用励磁信号是使用美国公司生产的OSC1758集成芯片产生,通过外接的电阻器和电容器就可以调整励磁信号的幅值(2V )和振荡频率(2k Hz),使用十分方便。
1. 4精度补偿方案由于旋转变压器的生产、装配过程中存在的误差势必会造成角度测量误差,而且这种误差是周期性的,可以先使用精度更高的激光分度头测出360°范围内旋转变压器和编码器(旋转变压器RDC2S80 O SC1758)的综合角度误差,制成一张表格,然后在检测过程中,根据当前的角度值查得应该补偿的误差值,并进行适当的补偿。
显然,这种根据实测值进行查表补偿的思路既可以用软件方法实现,也可以用硬件方法实现,而下面介绍的主要是后一种方法。
补偿电路采用硬件电路实现补偿时,先使用EPROM(2732)存放使用激光分度头测得的误差补偿表,并且将设置成输出允许方式(OE接数字地),其地址线与RDC2S80的数据线相连,这样当旋转变压器转到某一角度θ时,对应会寻址到E PROM的某个单元,片选EPROM后就可以读出该单元中对应补偿Δθi,则修正后的实际角度值为:理论上,可以针对数字量的每个变化点进行补偿,这时必须测得2(N为RDC的位数)个数据,不但工作量很大,实际上也无必要,因为旋转变压器测角误差的变化不可能突变,所以可以根据实际需要压缩补偿表格的规格。
旋转变压器就是一种输出电压随转子转角变化得信号元件。
当励磁绕组以一定频率得交流电压励磁时,输出绕组得电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。
它主要用于坐标变换、三角运算与角度数据传输,也可以作为两相移相器用在角度--数字转换装置中。
按输出电压与转子转角间得函数关系,我所目前主要生产以下三大类旋转变压器:1. 正--余弦旋转变压器(XZ)----其输出电压与转子转角得函数关系成正弦或余弦函数关系。
2. 线性旋转变压器(XX)、(XDX)----其输出电压与转子转角成线性函数关系。
线性旋转变压器按转子结构又分成隐极式与凸极式两种,前者(XX)实际上也就是正--余弦旋转变压器,不同得就是采用了特定得变比与接线方式。
后者(XDX)称单绕组线性旋转变压器。
3. 比例式旋转变压器(XL)----其输出电压与转角成比例关系。
二、 旋转变压器得工作原理由于旋转变压器在结构上保证了其定子与转子(旋转一周)之间空气间隙内磁通分布符合正弦规律,因此,当激磁电压加到定子绕组时,通过电磁耦合,转子绕组便产生感应电势。
图4-3为两极旋转变压器电气工作原理图。
图中Z 为阻抗。
设加在定子绕组得激磁电压为 sin ω=- S m V V t (4—1) 图 4-3 两极旋转变压器 根据电磁学原理,转子绕组12B B 中得感应电势则为sin sin sin θθω== (4-2)B s m V KV KV t (4—2)式中K ——旋转变压器得变化;—的幅值m s V V ;θ——转子得转角,当转子与定子得磁轴垂直时,θ=0。
如果转子安装在机床丝杠上,定子安装在机床底座上,则θ角代表得就是丝杠转过得角度,它间接反映了机床工作台得位移。
由式(4-2)可知,转子绕组中得感应电势B V 为以角速度ω随时间t变化得交变电压信号。
其幅值sin θm KV 随转子与定子得相对角位移θ以正弦函数变化。