第二章 测试装置的基本特性
- 格式:doc
- 大小:3.91 MB
- 文档页数:25

第二章测试装置的基本特性本章学习要求1.建立测试系统的概念2.了解测试系统特性对测量结果的影响3.了解测试系统特性的测量方法为实现某种量的测量而选择或设计测量装置时,就必须考虑这些测量装置能否准确获取被测量的量值及其变化,即实现准确测量,而是否能够实现准确测量,则取决于测量装置的特性。
这些特性包括静态与动态特性、负载特性、抗干扰性等。
这种划分只是为了研究上的方便,事实上测量装置的特性是统一的,各种特性之间是相互关联的。
系统动态特性的性质往往与某些静态特性有关。
例如,若考虑静态特性中的非线性、迟滞、游隙等,则动态特性方程就称为非线性方程。
显然,从难于求解的非线性方程很难得到系统动态特性的清晰描述。
因此,在研究测量系统动态特性时,往往忽略上述非线性或参数的时变特性,只从线性系统的角度研究测量系统最基本的动态特性。
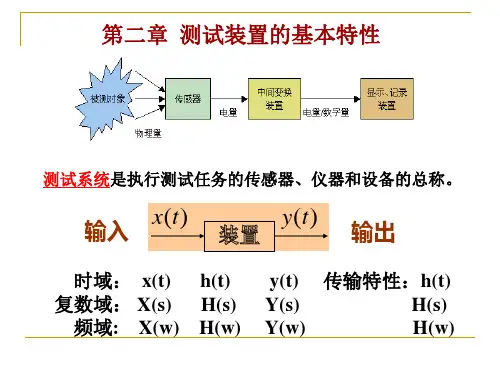
2.1 测试系统概论测试系统是执行测试任务的传感器、仪器和设备的总称。
当测试的目的、要求不同时,所用的测试装置差别很大。
简单的温度测试装置只需一个液柱式温度计,而较完整的动刚度测试系统,则仪器多且复杂。
本章所指的测试装置可以小到传感器,大到整个测试系统。
玻璃管温度计轴承故障检测仪图2.1-1在测量工作中,一般把研究对象和测量装置作为一个系统来看待。
问题简化为处理输入量x(t)、系统传输特性h(t)和输出y(t)三者之间的关系。
常见系统分析分为如下三种情况:1)当输入、输出能够测量时(已知),可以通过它们推断系统的传输特性。
-系统辨识2)当系统特性已知,输出可测量,可以通过它们推断导致该输出的输入量。
-系统反求3)如果输入和系统特性已知,则可以推断和估计系统的输出量。
-系统预测图2.1-2 系统、输入和输出2.1.1 对测试系统的基本要求理想的测试系统应该具有单值的、确定的输入-输出关系。
对于每一输入量都应该只有单一的输出量与之对应。
知道其中一个量就可以确定另一个量。
其中以输出和输入成线性关系最佳。
第二章测试装置的基本特性2-1进行某动态压力测量时,所采用的压电式力传感器的灵敏度为90.9nC/MPa ,将它与增益为0.005V/nC 的电荷放大器相连,而电荷放大器的输出接到一台笔式记录仪上,记录仪的灵敏度为20mm/V 。
试计算这个测量系统的总灵敏度。
当压力变化为3.5MPa 时,记录笔在记录纸上的偏移量是多少?解:若不考虑负载效应,则各装置串联后总的灵敏度等于各装置灵敏度相乘,即 S =90.9(nC/MPa)⨯0.005(V/nC)⨯20(mm/V)=9.09mm/MPa 。
偏移量:y =S ⨯3.5=9.09⨯3.5=31.815mm 。
2-2用一个时间常数为0.35s 的一阶装置去测量周期分别为1s 、2s 和5s 的正弦信号,问稳态响应幅值误差将是多少?解:设一阶系统1()1H s s τ=+,1()1H j ωτω=+()()A H ωω===T 是输入的正弦信号的周期稳态响应相对幅值误差()1100%A δω=-⨯,将已知周期代入得58.6%1s 32.7%2s 8.5%5s T T T δ=⎧⎪≈=⎨⎪=⎩2-3求周期信号x (t )=0.5cos10t +0.2cos(100t −45︒)通过传递函数为H (s )=1/(0.005s +1)的装置后得到的稳态响应。
解:1()10.005H j ωω=+,()A ω=()arctan(0.005)ϕωω=-该装置是一线性定常系统,设稳态响应为y (t ),根据线性定常系统的频率保持性、比例性和叠加性得到y (t )=y 01cos(10t +ϕ1)+y 02cos(100t −45︒+ϕ2) 其中011()00.y =⨯≈,1(10)arctan(0.00510) 2.86ϕϕ==-⨯≈-︒0202(100)0.20.179y A x ==≈,2(100)arctan(0.005100)26.57ϕϕ==-⨯≈-︒所以稳态响应为()0.499cos(10 2.86)0.179cos(10071.57)y t t t =-︒+-︒2-4气象气球携带一种时间常数为15s 的一阶温度计,以5m/s 的上升速度通过大气层。
第二章 测试装置的基本特性一、知识要点及要求1) 了解测试装置的基本要求,掌握线性系统的主要性质;2) 掌握测试装置的静态特性,如线性度、灵敏度、回程误差、稳定度和漂移等; 3) 掌握测试装置的动态特性,如传递函数、频率响应函数、单位脉冲响应函数; 4) 掌握测试装置频率响应函数的测量方法; 5) 掌握一、二阶测试装置的动态特性及其测试。
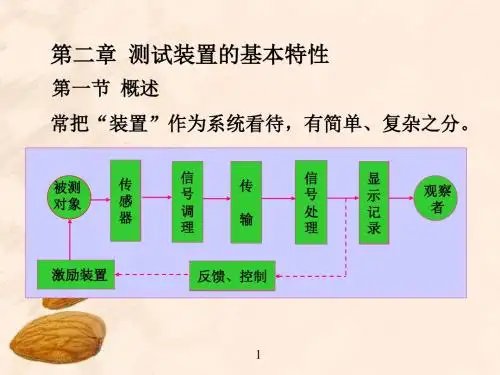
二、重点内容及难点(一)测试装置的基本要求1、测试装置又称为测试系统,既可指众多环节组成的复杂测试装置,也可指测试装置中的各组成环节。
如图,一般的工程测试问题都可以看作输入信号x(t),输出信号y(t)和测试系统的传输特性h(t)三者之间的关系,即三类问题:1) 如果输入信号x(t)、输出信号y(t)已知,求测试系统的传输特性h(t); 2) 如果测试系统的传输特性h(t)、输出信号y(t)已知,求输入信号x(t); 3) 如果测试系统的传输特性h(t)、输入信号x(t)已知,求输出信号y(t)。
2、测试装置的基本要求:1) 线性的,即输出与输入成线性关系。
但实际测试装置只能在一定工作范围和一定误差允许范围内满足该要求。
2) 定常的(时不变的),即系统的传输特性是不随时间变化的。
但工程实际中,常把一些时变的线性系统当作时不变的线性系统。
3、线性系统的主要性质 1) 叠加原理:若)()()()(2211t y t x t y t x −→−−→−,则)()()()(2121t y t y t x t x ±−→−± 2) 比例特性:若)()(t y t x −→−,则)()(t ay t ax −→− 3) 微分特性:若)()(t y t x −→−,则dtt dy dt t dx )()(−→− 4) 积分特性:若)()(t y t x −→−,则⎰⎰−→−0)()(t t dt t y dt t x (初始状态为0)5) 频率保持性:若输入为某一频率的简谐信号,则系统的稳态输出也是同频率的简谐信号。
第二章测试装置的基本特性第一节概述一、对测试装置的基本要求1.工程测试问题通常的工程测试问题总是处理输入量x(t)、装置(系统)的传输特性h(t)和输出量y(t)三者之间的关系如图2-1,即:系统(响应)1)如果x(t)、y(t)可以观察(已知)的量,则可推断h(t)。
2)如果h(t)已知,y(t)可测,则可推断x(t)。
3)如果x(t)和h(t)已知,则可推断和估计y(t)。
2.理想的测试装置①输出和输入成线性关系。
即具有单值的、确定的输入-输出关系。
②系统为时不变线性系统。
3.实际的测试装置①只能在较小工作范围内和在一定误差允许范围内满足线性要求。
②很多物理系统是时变的。
在工程上,常可以以足够的精确度认为系统中的参数是时不变的常数。
二、线性系统及其主要性质1.线性方程方程中的所有变量的幂次不大于1的方程称为线性方程。
注意导数的阶次与幂次的区别,以及经过拉氏变换后所得到的相函数中,阶次与幂次的表现形式。
2.线性系统用线性方程来描述的系统就是线性系统。
线性系统符合叠加性和均匀性(齐次性)。
3.时不变线性系统当系统的输入x(t)和输出y(t)之间的关系可以用常系数线性微分方程)()(0)(1)(1)(0)(1)(1)(1111t x b bb b t y a a a a dtt dx dt t x d m dt t x d mdtt dy dtt y d n dtt y d n m m mm n n nn ++⋅⋅⋅++=++⋅⋅⋅++------ (2-1)来描述时,该系统称为时不变线性系统,也称定常线性系统。
式中t 为时间自变量。
系统的系数a n , a n-1, …,a 1, a 0和 b m , b m-1, …, b 1, b 0均为常数,既不随时间而变化,也不是自变量x 、因变量y 及它们各阶导数的函数。
4.时不变线性系统的性质如以x (t )→ y (t )表示上述系统的输入、输出的对应关系,则时不变线性系统具有以下一些主要性质。
第二章测试装置的基本特性一、 知识要点及要求 1、 掌握线性系统及其主要特性。
2、 掌握测试装置的动态特性及静态特性。
3、 掌握一、二阶测试装置的频率响应特性。
4、 掌握测试装置的不失真测试条件。
二、 重点内容1、 测试装置的基本要求测试装置的基本特性主要讨论测试装置及其输入、输出的关系。
理想的测试 装置应该具有单值的、确定的输入一一输出关系。
即,对应于某一输入量,都只 有单一的输出量与之对应 。
知道其中的一个量就可以确定另一个量。
2、 线性系统及其主要性质线性系统的输入x(t)与输出y(t)之间的关系可用下面的常系数线性微分方程时不变线性系统的主要性质:1) 叠加原理特性 2) 比例特性3) 系统对输入导数的响应等于对原输入响应的导数4) 如系统的初始状态均为零,则系统对输入积分的响应等同于对原输入响应 的积分。
5) 频率保持性3、测试装置的静态特性测试装置的静态特性就是在静态测量情况下描述实际测试装置与理想定常线 性系统的接近程度。
描述测试装置静特性的主要指标有:1) 线性度是指测量装置输出、输入之间保持常值比例关系的程度。
作为技术 指标则采用线性误差来表示,即用在装置标称输出范围 A 内,校准曲线与拟合直 线的最大偏差B 来表示。
也可用相对误差来表示,如B线性误差=-100%A2) 灵敏度S 当装置的输入x 有一个变化量厶X ,引起输出y 发生相应的变化 为勺,则定义灵敏度为:y dy=x dx3) 回程误差 当输入量由小增大和由大减小时,对于同一输入量所得到的两 个输出量却往往存在着差值,把在全测量范围内,最大的差值 h 称为回程误差。
dt n 二加 *讐 a o y(t) dt dtdt,d m x(t) , d m 」x(t) , dx(t), “、二 b m m — b m 」 石一bib 0X (t)dt dtdt来描述时,则称该系统为时不变线性系统,也称定常线性系统。
式中t 为时间自变量,a n 、a n i 、,、 a i 、a ° 和bn 、b n 」、,、 b i 、b ° 均为常数。