采用MEMS传感器汽车智能前照灯系统模型设计
- 格式:pdf
- 大小:260.69 KB
- 文档页数:3

汽车智能灯光控制系统电路设计分析摘要:在本文中介绍的是一种可以使汽车在夜间行驶时自动控制远近灯光转换的系统,该系统主要是由继电器进行动作的执行,由光敏传感器进行信号的采集,由单片机进行主要控制的。
如果在汽车上安装该系统,那么该汽车在夜间行驶的过程中,可以根据本车与头车的驾驶距离进行判断,来对本车的前大灯远近灯光进行相应的转换功能。
该自动控制系统具有成本价格低、且使用起来稳定、可靠性高的特点,所以推广价值和使用价值较高。
关键词:远近灯光自动转换;灯光自动控制系统;单片机在如今时代人们出行的方式之中,汽车根据多年飞速的发展,已经显得极为普遍和方便了。
在我国大部分普通家庭中,也都具备的汽车这一交通工具。
但随之而来的就是汽车在交通中带来的隐患的事故,近年来,在交通中,发生事故的呈不断上升趋势,尤其是在夜间,汽车在行驶的过程中,由于对远近灯光切换不当,会给其他行驶的车辆带来一定的困扰和安全隐患。
在夜间行驶的过程中,两辆汽车在对头行驶时,应该将汽车灯光切换成近光灯,以免对对方司机进行灯管直射,待会车过后,才可将灯光切换为元光。
所以,对汽车远近灯光自动切换控制进行研究,可以有效的降低汽车远近灯光造成的安全隐患,这也使得这项研究是非常有必要的了。
在对汽车远近灯光自动切换控制这一领域,已经有前人做出了相关的研究,不仅如此,还有相关的电子产品也有被制作出来。
但是由于该类电子产品的组件是由分立元件所构成得,所以在一定的角度上来说,其不论是可靠性、灵敏性还是稳定性上来说,都显得较为差劲。
所以该类电子产品也被扼杀在摇篮之中。
而随着近年来计算机技术有着飞速的发展和不断的前进,在小型的控制中,单片机已经可以足以胜任了,且单片机还具备着成本价格低、稳定性和可靠性较为优秀的特点,所以我们在制作汽车远近灯光自动控制系统时,可以采用光电传感器、单片机等等的元件进行。
经过相关实验已经显示出,由单片机制作出来的系统,灵敏度高、成本低、稳定性和可靠性高。

智能车头灯的智能调光系统设计与实现智能车头灯作为现代汽车的重要组成部分之一,不仅可以提供行车照明功能,还能够提高行车安全性和驾驶乐趣。
而智能调光系统作为智能车头灯的核心功能,能够根据车辆和道路状况,实现自动调节车头灯亮度和光束角度,从而更好地应对不同的行车环境。
本文将详细介绍智能车头灯的智能调光系统的设计与实现。
一、智能车头灯的智能调光系统原理智能车头灯的智能调光系统基于车辆和道路状况来调节车头灯的亮度和光束角度,以提供最佳的照明效果。
其工作原理主要分为以下几个步骤:1. 传感器感知环境:智能车头灯系统内置多个传感器,例如光照传感器、雨滴传感器、摄像头等,用于感知车辆周围环境的亮度、雨量和道路状况等信息。
2. 数据处理与分析:通过对传感器获取到的数据进行处理和分析,智能车头灯系统能够了解当前的行车环境。
例如在光照不足的情况下,系统会自动调节车头灯的亮度以提供更好的照明效果。
3. 控制命令生成:根据对行车环境的分析,智能车头灯系统会生成相应的控制命令,用于调节车头灯的亮度和光束角度。
这些控制命令可以通过系统内部的控制电路发送到车头灯驱动器,从而实现灯光的调节。
4. 车头灯调光实现:根据控制命令,车头灯驱动器会相应地调节车头灯的亮度和光束角度。
通常使用的调光方式有两种,一种是利用电流控制器调节灯泡电流的大小来调节亮度,另一种是利用液晶等液态材料控制光的透过程度来实现亮度调节。
二、智能车头灯的智能调光系统设计要点要实现一个高效可靠的智能车头灯的智能调光系统,需要考虑以下关键要点:1. 传感器的选择与布置:选择合适的传感器用于感知车辆周围环境的亮度、雨量和道路状况等信息。
同时需要合理布置传感器的位置,以保证获取到的数据准确可靠。
2. 数据处理与分析算法:针对传感器获取到的数据,设计合适的数据处理与分析算法以获取对行车环境的准确描述。
可以利用机器学习、模式识别等技术来优化算法性能。
3. 控制命令生成策略:根据对行车环境的分析,设计合理的控制命令生成策略。

汽车智能灯光系统设计方法分析摘要:面对大众对汽车车灯功能丰富、智能化等要求,还需提出科学的智能灯光系统设计方法,保证相关产品得到合理开发。
基于此,提出由模式选择、智能控制、数字控制等不同功能模块构成的系统设计方案。
通过合理选择主控芯片、控制器等硬件设备,完成各种传感器电路和智能车灯设计,并实现各种模块软件编程,最终取得了理想的系统开发效果,因此提出的技术方案具有一定推广价值。
关键词:汽车;智能灯光;系统设计引言:伴随着科学技术快速发展,智能化已经成为汽车技术的主要发展方向。
而引入微电子技术实现汽车灯光系统设计,可以通过感光元器件加强环境光线检测,经过微电脑芯片分析和处理后则能根据光环境变化发出对应控制指令,自动完成灯光模式切换,充分体现系统的智能化特征。
因此,还应加强汽车智能灯光系统设计方法研究,从而迎合汽车技术的应用发展趋势。
1汽车智能灯光系统设计思路设计汽车智能灯光系统,可知系统由车灯、传感器、信息收发装置、处理器等部分构成,能够实现对汽车上大灯、转向灯、近光灯、远光灯和尾灯等各种指示灯的自动调节和控制。
2021年,仅智能大灯市场规模达到了145.7亿元,相较于2020年同比增长24.85%。
面对激烈的市场竞争,各汽车照明企业陆续提出智能灯光设计创意,如光峰科技提出将车灯模组和智能系统结合,将车灯作为显示功能实现与座舱域功能对接,使车灯附加地面显示、地面投影等作用,如图1所示,与驾驶员保持良好信息交互关系。
图1汽车大灯地面投影显示功能创意图把握照明+显示的融合趋势设计汽车智能灯光系统,应认识到实际汽车上的车灯类型较多,在位置和功能上存在一定差异,在使用时则需结合环境变化完成照明车灯的自动变换,因此在灯光控制上需要进行控制模式切换,保证达到较高控制效率和精度,以便结合汽车运行需要实现控制指令的智能调节。
因此在系统功能开发方面,需采用模块化设计理念完成灯光模式选择模块、智能照明模块、数字照明模块和手动照明模块等各部分的设计。

汽车自适应前照灯系统的设计摘要传统的汽车照明系统主要由前照灯系统,信号照明系统,车内照明系统三大部分组成。
随着科技的进步,传统照明系统也经历了长足的发展,但是实际的使用中,传统的前照灯系统依然存在着诸多问题,在面对复杂的道路条件和行车状况时,交通安全仍然存在巨大的隐患。
因此,如何使传统汽车照明智能化,驾车更安全,更舒适就成为一个十分紧迫而又有重大现实意义的课题。
针对传统的汽车照明灯夜间行驶在弯道时无法调节照明角度、在弯道内侧易出现盲区,在坡道无法调节照明角度等情况,提出了一种前照灯弯道自适应照明控制系统,以提高夜间行车安全性。
本文主要介绍了一种以单片机STC90C51为核心设计的汽车自适应前照灯计算机控制系统。
简要的介绍汽车自适应前照灯的产生的背景、当今国内外发展现状及趋势。
分析了该系统的组成、功能和工作原理。
在文章硬件部分,详细设计了汽车自适应前照灯左右转向计算机控制系统的主控制器及外围电路。
在软件部分,设计了系统软件的整体流程,算法程序,实现了一个可根据道路以及方向盘转角信号随动转向的控制系统。
通过最后的系统调试,保证了车辆在弯道行驶时,前照灯能根据路况调整到合适的位置给驾驶者提供照明。
表明了本设计方案的可行性和正确性。
在论文的最后,对本次毕业设计进行了总结,提出了一些尚待解决的问题,为今后的进一步完善提出了参考意见。
关键词:自适应照明,随动转向,安全驾驶,STC90C51A PROJECT OF AUTOMOTIVE ADAPTIVE FRONTLIGHTING SYSTEMABSTRACTTraditional automotive lighting system consists of three major components: headlamp system, signal lighting and interior lighting system. As technology advances, the traditional lighting system also continues to develop, but in practice, there are still many problems in the traditional headlamp system. Facing complex road conditions and driving conditions, there are colossal security bungles in the traffic safety. Therefore, how to make the traditional automotive lighting intelligent, and how to make the driving more secure and more comfortable have become a very urgent and great practically significant issue.The traditional automotive lighting drive at night may be faced some conditions, for example, inability of adjusting illumination angels at the curve, the appearance of blind section at the clip, inability of adjusting illuminati on angels at the ramp, based on which, a headlamp adaptive lighting control system at the curve is put forward in order to improve the driving safety at night. This paper introduces a Computer control system of the automotive adaptive headlamps with STC90C51 microcontroller core design. The paper will briefly introduce the background of the appearance of auto-adaptive headlamps, and its current development situations and trends at home and abroad. It will also analyze the composition, function and working theory of the system. The hardware part in the paper detailed designs the host controller and peripheral circuits of the auto adaptive headlamps left and right tuning computer control system. The software part projects the overall process of system software, algorithms program, finishing a control system that canoptional turn according to vehicle speed and steering angle signals. The final system debugging ensures that when the vehicles are driving at the curve, the headlamps can adjust itsel according to road conditions to a suitable position to light for the drivers. The project is of feasibility and correctness.At the end of the paper, a conclusion of the project is drawn to put forward some problems waiting for solving and to come up with some idea about the later improvement.Key words: adaptive lighting, tracking turning, safe driving,STC90C5目录第1章绪论 (1)§1.1 课题背景 (1)§1.2 国内外发展现状及发展趋势 (3)§1.3本课题的研究意义与主要内容 (5)第2章系统整体方案设计 (6)§2.1 系统的功能及构成 (6)§2.2 系统基本功能 (8)§2.3 系统的工作原理 (8)§2.3.1 随动转弯角度 (9)§2.3.2 车身纵倾调光 (10)§2.4本章小结 (10)第3章系统硬件设计 (11)§3.1 AFS主控制器设计 (11)§3.1.1 微控制芯片的选型 (11)§3.1.2 信号处理电路设计 (13)§3.1.3 电源电路设计 (15)§3.1.4 电机控制电路设计 (15)§3.2 执行器选择 (17)§3.3 传感器模块选择 (17)§3.4本章小结 (19)第4章系统软件设计 (20)§4.1程序思路 (20)§4.2系统分块程序设计 (21)§4.2.1 随动转弯程序 (22)§4.2.2 倾角转动程序 (23)§4.3 本章小结 (24)第5章系统调试 (25)§5.1 系统硬件调试 (25)§5.1.1 常见的硬件故障 (25)§5.1.2 硬件调试方法 (25)§5.2 系统软件调试 (26)§5.3 基于PROE的运动建模 (27)§5.4 本章小结 (28)结论 (29)参考文献 (30)致谢 (31)附录 (32)附录1原理图 (32)附录2 PCB (33)附录3 实物图 (34)附录4程序代码 (35)第1章绪论§1.1 课题背景自19世纪汽车诞生以来,已经历了一个多世纪的风雨。
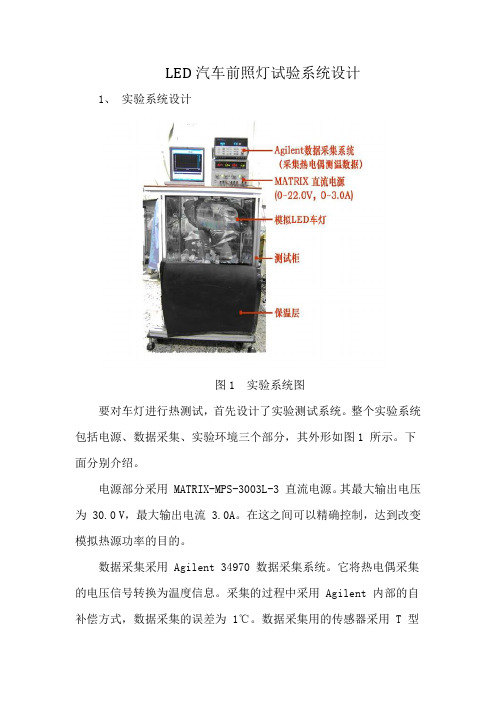
LED汽车前照灯试验系统设计1、实验系统设计图1 实验系统图要对车灯进行热测试,首先设计了实验测试系统。
整个实验系统包括电源、数据采集、实验环境三个部分,其外形如图1 所示。
下面分别介绍。
电源部分采用 MATRIX-MPS-3003L-3 直流电源。
其最大输出电压为 30.0 V,最大输出电流 3.0A。
在这之间可以精确控制,达到改变模拟热源功率的目的。
数据采集采用 Agilent 34970 数据采集系统。
它将热电偶采集的电压信号转换为温度信息。
采集的过程中采用 Agilent 内部的自补偿方式,数据采集的误差为 1℃。
数据采集用的传感器采用 T 型热电偶,其测量误差约为 0.5℃。
实验的大环境为一密闭实验箱,以减小环境的影响。
实验过程中模拟热源放置于改造了的荣威轿车普通车灯,替代了车灯原来的近光灯,然后将车灯置于实验箱内进行测试。
改装后的车灯实物图如图2。
图2 模拟LED车灯实物图2、实验结果与分析首先对改装后的车灯进行了热测试,实验时未采用任何强化散热措施。
实验的功率范围从 30 W 至 50 W,每个温度点约 2 小时达到稳态,环境温度为 19℃。
因为实验测量过程中,最能直接反映发光二极管工作温度的是如图 3 所示的热源底部温度,因此这里将其单独列出。
图3热源底部热电偶布置图4 给出了模拟热源底面测温点温度随热源总功率变化。
可以看到热源底面温度随着加热功率的升高几乎线性增加。
当加热功率从30 W 升高到 50 W 时,热源底面的温度升高了约 40℃,达到 150℃左右。
从图中可以看出两个热源底部温度有所不同,这是由于放置热源的铝板是竖直放置,一个测温点在上,一个测温点在下,灯内自然对流引起的热空气上升对上面的测温点有加热作用。
在之后的实验过程中一般选取温度较高点的温度代表热源底部温度。
图4 模拟热源底面温度随功率的变化从图中可以看到在器件功率为 30 W 时,热源底部的温度为107℃,根据LEWD1A 型 LED 的热阻 4 K/W,可以推算如果采用真实的器件,器件的结点温度将超过 140℃,此时如果采用真实的器件其工作状态已经比较差了。
采用MEMS传感器汽车智能前照灯系统模型设计
赵宏颖
【期刊名称】《宁波职业技术学院学报》
【年(卷),期】2011(015)002
【摘要】为了提高汽车行驶的安全性,设计了一种自动智能前灯系统模型.该系统采用MEMS 三维加速度传感器,获取汽车运动参数,配合DSP处理器进行高速运算,控制前照灯照射方向,可以解决不同速度和运行方向条件下的汽车智能照明问题.【总页数】3页(P1-3)
【作者】赵宏颖
【作者单位】齐齐哈尔人民广播电台,黑龙江,齐齐哈尔,160005
【正文语种】中文
【中图分类】TN911.72;TP273+.5
【相关文献】
1.汽车智能前照灯系统弯道转角模型的建立 [J], 孙少杰;蔺宏良;朱布博
2.基于STM32F103单片机的汽车前照灯智能控制系统的设计与实现 [J], 翟羽佳;刘雨佟;汪凡
3.基于机器视觉与雷达检测的汽车智能前照灯系统设计研究 [J], SONG Bai-ling;WU De-hong;MAO Yi-ming;ZOU Yu-qi;CHANG Wei-bin;YANG Run-fa;YU Miao
4.基于STM32F103单片机的汽车前照灯智能控制系统的设计与实现 [J], 翟羽佳; 刘雨佟; 汪凡
5.汽车智能LED前照灯照明系统控制设计 [J], 杜天慧
因版权原因,仅展示原文概要,查看原文内容请购买。
本科生毕业设计(论文)学院:____________________ 专业:____________________ 学生:_____________________ 指导教师:_____________________完成日期年月汽车车灯智能控制系统设计Design of Intelligent Control System for Automobile Lamp总计:24页表格:1个插图:18幅汽车车灯智能控制系统设计Design of Intelligent Control System for Automobile Lamp学院:_______________________________专业:_______________________________学生姓名:_______________________________学号:_______________________________指导教师(职称):________________________评阅教师:完成日期:汽车车灯智能控制系统设计电气工程及其自动化专业[摘要]本系统是基于单片机控制的汽车车灯智能系统,模拟并显示出汽车驾驶过程的灯光控制。
其中主要包括汽车的远近光灯的模拟显示。
具体是通过单片机板上的超声波测距模块和光线感应模块来控制LED灯的亮灭显示状态。
在本设计过程中,通过使用单片机来控制车灯的状态,并把模拟信息在LCD上显示出来,以此加强了对单片机的了解和使用。
[关键词]单片机;电路基础;汽车车灯控制系统;LED灯Design of Intelligent Control System for Automobile Lamp Electrical Engineering and Automation Specialty LI Lin-jie Abstract: This system is the intelligent automobile lamp based on MCU control system simulation and to show the car driving lights control. Including the car made a left turn as far as light, brake and alarm switch, analog display. Is controlled by switching actions of the MCU Board LED lights shows a left turn, right turn, brake and other corresponding State. During the design process, through the use of Protel drawing schematics, makes the circuit more intuitive and deepened understanding of Protel application.Key words: Microcontroller; circuit theory; automobile lamp control system; LED lights目录1 引言 (1)1.1汽车车灯智能控制系统的国内外发展现状 (1)1.2课题研究的意义 (1)2 控制系统方案设计 (1)2.1汽车智能照明系统 (1)2.2汽车车灯智能控制系统中的关键问题 (1)2.3 系统设计的工作原理 (2)3系统的硬件设计 (3)3.1系统各模块硬件设计 (3)3.1.1单片机模块 (3)3.1.2超声波测量距离模块 (4)3.1.3光感应模块 (5)3.1.4系统复位模块 (6)3.1.5A/D转换模块 (7)3.1.6LCD显示模块 (7)3.1.7 继电器模块 (8)3.2系统主电路设计 (8)4系统软件设计及调试 (11)4.1 系统软件流程图 (11)4.2 PCB软件制图 (12)4.3 系统调试 (12)结束语 (14)参考文献 (15)致谢 (19)1 引言1.1汽车车灯智能控制系统的国内外发展现状在对汽车车灯智能控制系统研究的过程中国外那些实力雄厚的汽车制造商对其研究是比较早的,在二十世纪八十年代,国外的一些汽车生产商就完成了汽车的车灯智能控制系统的研究。
汽车智能前照灯系统的设计与实现的开题报告一、毕设选题背景随着科技的不断发展与进步,汽车行业也在不断地进行着变革与更新,其中智能化技术成为了汽车行业的一个重要趋势。
在汽车智能化技术的发展中,智能前照灯系统是一个非常重要的组成部分,它不仅能提高行车安全,也能提供更好的驾驶体验。
在现有的前照灯系统中,虽然智能化技术已经得到了应用,但是还存在一些问题。
例如,现有的前照灯无法自动适应不同的行驶环境,需要手动调整灯光的角度和亮度。
此外,现有的前照灯也无法自动识别和跟踪前面的车辆和行人,不能根据行驶路况和其他车辆的情况来自动调整灯光的角度和亮度。
因此,本毕设的设计目标是设计一款能够自动适应不同行驶环境,并能够自动识别和跟踪前面的车辆和行人,同时能够根据行驶路况和其他车辆的情况来自动调整灯光角度和亮度的智能前照灯系统。
二、毕设研究内容1. 前照灯系统的分析与需求分析现有的前照灯系统的不足之处,指出智能化的技术应该实现的目标,对智能前照灯系统的关键技术和设计需求进行详细阐述。
2. 智能前照灯系统的硬件设计对智能前照灯系统的硬件设计进行详细的分析和研究,并选用合适的硬件组件进行设计。
3. 智能前照灯系统的算法设计选用合适的算法对前照灯系统进行设计,主要包括图像处理算法、智能算法和控制算法。
4. 智能前照灯系统的软件设计进行智能前照灯系统的软件设计,并提供用户友好的操作界面。
5. 智能前照灯系统的实现与测试在硬件和软件的支持下进行智能前照灯系统的实现,并对系统进行测试和评估。
三、毕设研究意义本毕设的研究结果可以为汽车行业的智能化技术发展做出贡献,提高行车安全,为驾驶者提供更好的驾驶体验。
同时,本毕设也可以拓展智能前照灯系统的研究范围,建立一套可复用的智能前照灯系统设备。
此外,本毕设也可以提高我国汽车行业的竞争力,推动我国汽车行业的发展。
四、毕设研究计划总体规划:预计用时20周,分为论文撰写、实验、总结三个主要阶段。
具体计划如下:第一阶段(2周):研究前照灯系统的工作原理,确定研究需求;第二阶段(4周):进行硬件设计,包括选用合适的硬件组件和进行电路设计;第三阶段(5周):进行算法设计,包括图像处理算法和智能算法的设计和开发;第四阶段(5周):进行软件设计,包括用户操作界面的设计和开发;第五阶段(4周):进行实现与测试,对系统进行测试和评估。
汽车车灯智能控制系统毕业设计该智能控制系统是为汽车车灯设计的,其主要目的是增强车辆的安全性和更好的驾驶体验。
该系统使用了许多技术,如图像处理,微控制器和无线通信技术。
这些技术的使用使得该系统能够智能地控制车辆的前灯,后灯和指示灯。
本文将详细介绍该车灯智能控制系统的设计与开发。
概述近年来,随着交通工具的普及,道路上的交通状况也变得更加复杂。
许多交通事故都是由于驾驶员没有足够的警惕性造成的。
因此,需要开发一种车灯智能控制系统来增强行车安全性。
该系统使用了图像处理技术,能够解析车辆前面的路况。
如果路况较暗或天气状况较劣,系统会自动启动前灯。
此外,当车辆行驶到一个照明状态不足的路段时,系统还可以自动控制灯光的角度和亮度,以确保驾驶员的能够获得更好的能见度和更好的行驶体验。
该系统还具有智能指示灯功能,可以智能地识别驾驶员的意图并相应地动作。
例如,当驾驶员向左转时,系统会自动启动左转指示灯,并在转向结束后自动关闭。
这大大方便了驾驶员行驶操作。
系统设计该系统包括一个摄像头、微控制器和无线通信模块。
该摄像头负责获取车道的信息,并传送给微控制器进行图像处理。
该微控制器根据图像处理结果,智能地控制车辆的车灯和指示灯,使其具有更好的适应性和舒适性。
而无线通信模块则负责与其他设备进行数据的互换和通信。
图像处理该系统的核心技术是图像处理。
为了精确地控制前灯和后灯的亮度和角度,需要利用摄像头采集路况图像并对其进行处理。
系统使用基于OpenCV的Python语言进行图像处理。
主要包括以下步骤:- 采集图像并转换为灰度图像- 对图像进行滤波,以去除图像中的噪音- 进行二值化操作,将图像分割为灰度值高于某个阈值的像素和灰度值低于阈值的像素- 对二值化后的图像进行形态学操作,以弥补图像中孔洞等的缺陷- 使用霍夫变换检测出图像中的直线,以便更准确地控制车灯的角度和亮度智能控制该智能控制系统包括前灯、后灯和指示灯。
其中,前灯和后灯自动调节,以适应不同的路面状况和天气条件。