
耐波性作业
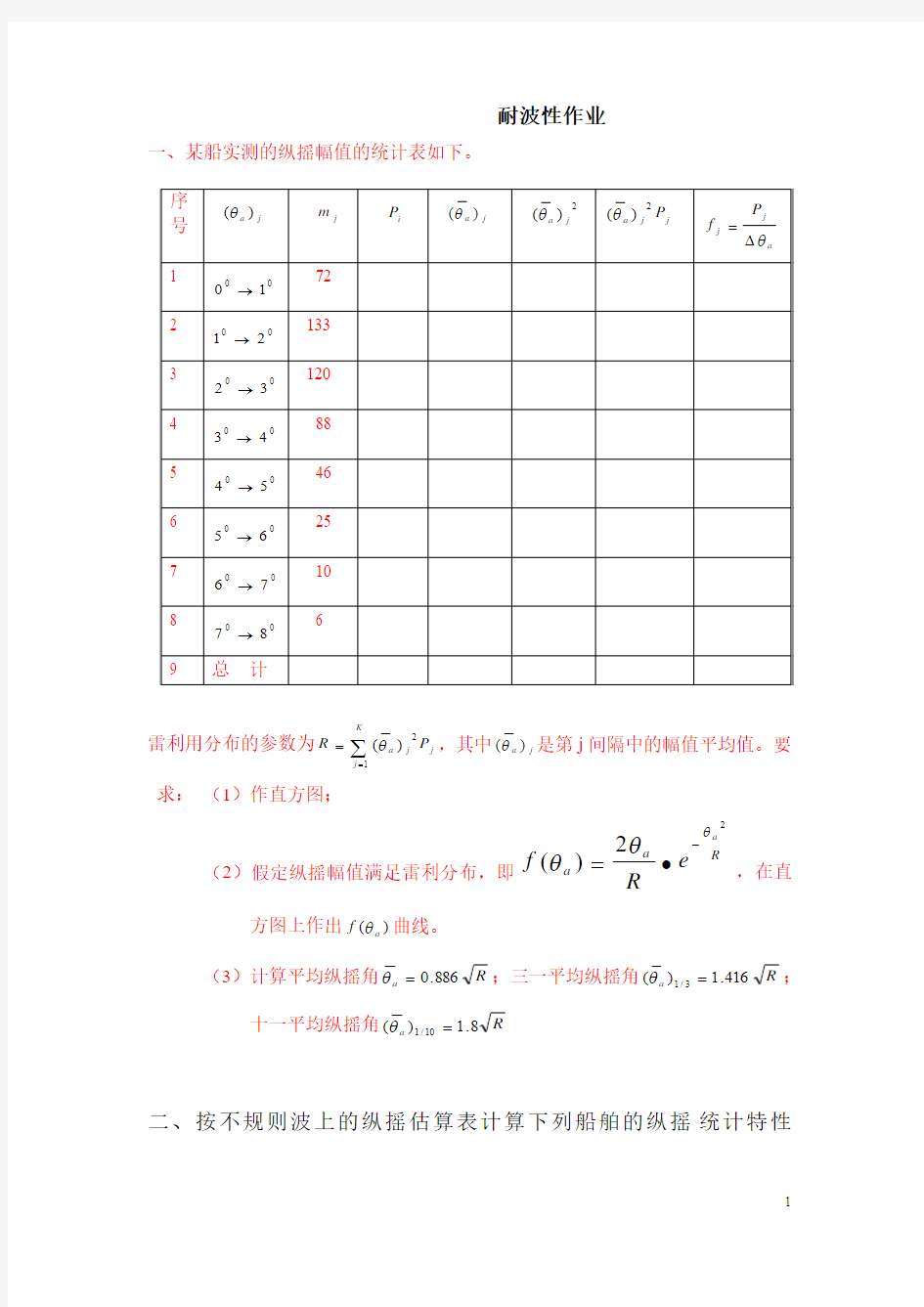
一、某船实测的纵摇幅值的统计表如下。
雷利用分布的参数为j
K
j j
a P R ∑
==1
2)
(θ,其中j a )(θ是第j 间隔中的幅值平均值。要
求: (1)作直方图;
(2)假定纵摇幅值满足雷利分布,即R
a a a e
R
f 2
2)(θθθ-
?=
,在直
方图上作出)(a f θ曲线。
(3)计算平均纵摇角R a 886.0=θ;三一平均纵摇角R a 416.1)(3/1=θ;
十一平均纵摇角R a 8.1)(10/1=θ
二、按不规则波上的纵摇估算表计算下列船舶的纵摇统计特性
(V
g
e 2
,180ω
ωωβ+
==)。
已知:三一平均波高4)2(3
/1=A ρ米;船速
V=6.37米/秒。
其中波谱)(ωρS 按12届ITTC 单参数公式计算。
三、已知某船船长L=147.18米,船宽B=20.40米,排水量D=16739吨,型深H=12.40米,重心高度z g =8.02米,初稳性高度h=1.2米,
阻尼系数2μ=0.12。
(1) 求横摇固有周期;
(2) 横摇的放大因数为()
2
2
2
2411
φ
φ
μα
φΛ+Λ-=
mo
A
,
请按下列波浪频率计算横摇放大因数,ω=0,
0.1,0.3,0.4,0.458, 0.5,0.6,0.7,0.9,1.1,1.3,∞。
四、排水量为10000吨,初稳性高度h 为0.90米的船舶的横摇固有
周期为14秒。若在重心的上面2米处减少1000吨的重量,问新的横摇周期是多少?(稳心M 的位置认为不变,由于重心的改变,要求绕新的GX 轴的转动惯量)。
五、已知某船横摇周期T=13秒,初稳性高度h=1米,无因次阻尼衰减系数μ=0.10,计算: (1)使船发生共振的波长; (2)若波浪最大倾角为4
/10534.0-=λ
α(弧度),求共振时最大振幅;
(3)假使该船由于载荷分布发生改变(排水量不变),总的质量惯性矩降低了10%,欲使固有周期不变,问初稳性高度改变了多少?在此新情况下,假定阻尼力矩系数2N 保持不变,试求共振横摇角度。
六、已知某货船的船宽B=20.40米,吃水T=8.04米,重心高度z g =8.02米,初稳性高度h=1.20米,舭龙骨比A b /LB=0.033,航行I 类航区。试计算该船的横摇角。
七、已知某船吃水T=8.02米,垂向棱形系数χ=0.70,计算该船的纵摇固有周期。
八、试按“实船试验数据分析表”,利用下表数据,计算某船纵摇幅
值的大小,并作出直方图以及雷利分布曲线。
九、某海面上记录的波高如下表。
试确定该海区的平均波高、有义波高、十一平均波高和百一平均波高。
十、某船在不规则波中航行时有陀螺仪测得2倍横摇幅值如下表。
试求平均横摇角、有义幅值、十一平均幅值和百一平均幅值。
十一、某船的排水量为3000吨,h=0.8,横摇周期9秒。与其相似的另一艘船排水量D为4000吨,h=0.85米,问该船的横摇固有周期应为多少?
十二、对尾进式载驳船的船模(缩尺比为85)进行零速横浪规则波中的试算,试验结果如下。
试求在5级海况( 米0.33/1=w ρ )时横摇统计值。计算中选用ITTC 单参数风浪谱密度公式。
船舶操纵与摇荡期末总复习 考试题目类型: 1. 名词解释(5题) 2. 填空(10题左右,空不限) 3. 画图题(1~2题左右) 4. 简答题(5~6题左右) 5. 计算分析题(2题) 考试内容(操纵性): 第一章绪论 1. 操纵性的定义?操纵性包括哪些方面的内容? 答:所谓操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。船舶操纵性包括以下四方面内容: A、航向稳定性:它是指船舶在水平面内的运动受扰动而偏离平衡位置,当扰动完全消除后,保持原有航向运动的性能; B、回转性:它是指船舶应舵作圆弧运动的性能; C、转首性及跟从性:它是指船舶应舵转首及迅速进入新的稳定运动状态的性能。前者称为转首性,后者称为跟从性; D、停船性能:它是指船舶对惯性停船和倒车停船的响应性能。 第2章船舶操纵 1、描述船舶运动的坐标系?什么是首向角、漂角以及航速角(定义及正负号)? 答:为了描述船舶的运动,我们常采用一下两种右手坐标系:a、固定坐标系Oxyz,它是固定在地球表面的右手坐标系,其原点O可以任意选择,通常与t=0时船舶重心G的位置相一致。Xy平面位于静水面内,z轴垂直向下为正。b、运动坐标系Gxyz,它是以船舶重心位置G为原点而固定于船体上的直角坐标系。x、y和z轴分别是经过G的水线面、横剖面和中纵剖面的郊县,x轴向首为正,z轴向下为正。 首向角:船舶的重心位置和船舶中纵剖面与x轴交角,称为首向角。由x轴转到中纵剖面顺时针为正。 漂角:船舶重心处的速度矢量V与x轴正方向的交角称为漂角,规定由速度矢量转到x 轴顺时针方向为正。 航速角:Xo轴到V的夹角,顺时针为正。 2、水动力导数(回答要全面)?水动力模型? 水动力导数的物理意义(位置导数、旋转导数、角加速度导数以及舵导数,要求会分析其正负号) 答:水动力导数: 水动力模型: 3. 船舶运动稳定性包含哪三部分?(直线、方向、位置,其相互之间的关系) 答:直线稳定性:船舶受瞬时扰动后,最终能恢复直线航行状态,但航向发生变化;方向稳定性:船舶受扰后,新航线为与原航线平行的另一直线; 位置稳定性:船舶受扰后,最终仍按原航线的延长线航行。 显然,具有位置稳定性必同时具有方向和直线稳定性,具有方向稳定性必同时具有直线
小学数学教学的趣味性 学习兴趣是学生学习的内部动机,是推动学生探求内部真理与获取能力的一种强烈欲望,它在学习活动中起着十分重要的作用。教学实践表明,学生如果对数学知识充满好奇心,对学会知识有自信心,那么他们总是主动积极、心情愉快的进行学习。因此,在数学教学过程中,教师应该寓教于乐,激发学生的兴趣,让他们积极,主动,愉快地进行学习。那么如何让小学数学教学富有趣味性呢?根据多年的教学经验,笔者认为有以下几种方式: 一、创建良好的课堂学习氛围 轻松愉快的课堂氛围对学生的学习活动是十分有利的。要注意运用教师的感染力,在向学生提出要求时,使学生感到亲切、善意,这样做,教师提出的要求很容易被学生接受并成为推动学习的动力。在教学过程中还要让学生感受到师生“共同在解决问题”,建立一种友好的合作关系。同时,尊重学生个性发展,不挫伤学生积极性,教学中允许学生畅述己见,动手动脑结对议论,给学生创造一个能主动探索的条件,使之更生动活泼自觉地学习。要重视建立宝贵的师生共同见解的气氛。另外,要适当的鼓励学生。从儿童心理特点来看,当他们看到自己的进步,内心产生对学习的愉快情感,体验时,就会增强学习兴趣和求知欲,信心更足。让学生及时了解自己学习结果,利用学习成果反馈作用是很有成效的。另外,要特别注意为差生在心理上精神上创造条件,创造一种善意的环境,激发他的兴趣和提高他的积极性,这样差生的自信心就增强了,上课不再担心、紧张,对学习也就感到愉快了。 有了良好的学习氛围,抽象,逻辑性强的数学学习过程对小学生来说也就更易于接受了。 二、善于运用多种趣味教学方式 教学过程中,要根据教学的内容,设计多样的教学方式,迎合学生的兴趣,吸引学生主动学习,达到教学目的。在课堂教学中,教师要因时、因事制宜,充分挖掘教具、实物、知识本身或某些生活情节蕴藏的魅力,让学生去领会数学内容的真谛,激励学生去探索发现。 (1)手脑并用的实践操作 小学生的普遍心理特点是好动。如果把他们好动的特点迁移到教学中去,让他们在学习过程中能够多动手,多思考,可以激发他们的学习兴趣,加深理解知识。我在教学过程中,就常常让学生们动手摆一摆小棍,圆片,三角形等等实物,让他们加深对这些物体数学特性的认识。 (2)灵活多样的游戏方式 教学过程中,适当的采用做游戏的方式,让学生在游戏中学习,可以使学生对学习产生浓厚的学习兴趣,获得良好的教学效果。据心理学研究,新颖的、活动的、直观形象的刺激物,最容易引起儿童大脑皮层有关部位的兴奋,形成了优势的兴奋灶,从而使儿童更好地建立暂时联系。 (3)新颖的练习方式 要把学生获得的知识变为技能,需要反复多练。但重复单调的练习,学生就会厌烦,注意力不集中,白白浪费了宝贵的时间。教师可以通过做游戏、打比赛等多种形式发挥身体各种器官的感觉能力,加深器官感知度,成为身体各器官都共知共晓的事物,延长记忆的保持时间。总之,练习的方式要多样新颖。 三、引导学生发现生活中数学的“趣味”
操纵性 1.船舶操纵性定义及研究内容 操纵性:船舶按照驾驶者的意图保持或改变其运动状态的性能。即船舶能保持或改变航速、航向和位置的性能。 研究内容:航向稳定性、回转性、转首性及跟从性、停船性能。 2.船舶附加质量的含义及与物理质量比例的大致范围 附加质量:附加惯性力与船的加速度成比例,其比例系数称为附加质量。(作不定常运动的船舶,除了船体本身受到与加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度,根据作用与反作用原理,水对船体存在反作用力,这个反作用力称为附加惯性力。) 附加质量:m x ≈(0.05~0.15)m m y ≈m z ≈(0.9~1.2)m 附加惯性矩Jxx ≈(0.05~0.15)Izz Jyy ≈(1~2)Izz Jzz ≈Iyy I 是质量惯性矩 3.漂角、航向角和水动力中心的含义 漂角:船舶重心处的速度矢量→ V 与x 轴正方向的交角称为漂角β。并规定速度矢量转向x 轴顺时针方向为正。 航向角:船首指向的方向和船舶在水面上的真实轨迹之间的夹角。 4动坐标系统速度转换到大地坐标系统公式:φφsin cos 00Y X X +=φφsin cos 00X Y Y -= 5、线性水动力导数Yv,Nv,Yr,Nr 的物理意义 水动力的位置导数Yv 是一个较大的负值。 水动力力矩的位置导数Nv 是一个不大的负值。 指的是v 引起的升力系数/力矩系数 水动力的旋转导数Yr 的绝对值不是很大,其符号由船型决定,可正可负。 水动力矩的旋转导数Nr 是一个很大的负值 。指的是r 引起的水动力系数/水动力矩系数 6、线/角加速度水动力导数的物理意义及数值大小判断 水动力的线加速度导数.V Y 是一个相当大的负值。指的是附加质量 水动力矩的线加速度导数.V N 是一个不大的数值,其符号取决于船型。指的是由V ? 引起的附加惯性力矩系数 水动力的角加速度.r Y 是一个较小的值,其符号取决于船型 水动力矩的角加速度导数.r N 是一个很大的负值。指的是回转加速度r ? 引起的船舶附加惯性力系数/惯性力矩系数 7、野本方程及物理意义 野本方程:. r T +r=K δ 物理意义δ:船舶的惯性力矩、阻尼力矩和舵力矩的作用下,进行的缓慢转,首运动,可以 用下列式子近似表示:.r I +Nr=M δ N 为船舶回转中的阻尼力矩系数,I 为船舶回转中的惯性力矩系数,M 为舵产生的转首力矩系数。T=I/N,K=M/N 由此可知,T 是惯性力矩系数与阻尼力矩系数之比,T 值大,表示船舶运动过程中收到的惯性力矩大,阻尼力矩小。而K 是舵转首力矩系数与阻尼力矩系数之比。K 值大,表示舵产生的转首力矩大,而阻尼力矩小。
小学数学趣味小故事 九九歌 九九歌就是我们现在使用的乘法口诀。远在公元前的春秋战国时代,九九歌就已经被人们广泛使用。在当时的许多著作中,都有关于九九歌的记载。最初的九九歌是从“九九八十一”起到“二二如四”止,共36句。因为是从“九九八十一”开始,所以取名九九歌。大约在公元五至十世纪间,九九歌才扩充到“一一如一”。大约在公元十三、十四世纪,九九歌的顺序才变成和现在所用的一样,从“一一如一”起到“九九八十一”止。现在我国使用的乘法口诀有两种,一种是45句的,通常称为“小九九”;还有一种是81句的,通常称为“大九九”。 儿歌比赛 动物学校举办儿歌比赛,大象老师做裁判。 小猴第一个举手,开始朗诵:“进位加法我会算,数位对齐才能加。个位 对齐个位加,满十要向十位进。十位相加再加一,得数算得快又准。” 小猴刚说完,小狗又开始朗诵:“退位减法并不难,数位对齐才能减。个 位数小不够减,要向十位借个一。十位退一是一十,退了以后少个一。十位 数字怎么减,十位退一再去减。” 大家都为它们的精彩表演鼓掌。大象老师说:“它们的儿歌让我们明白了 进位加法和退位减法,它们两个都应该得冠军,好不好?”大家同意并鼓掌祝 贺它们。 高斯小时候的故事 高斯念小学的时候,有一次在老师教完加法后,因为老师想要休息,所以便 出了一道题目要同学们算算看,题目是:1+2+3+ ..... +97+98+99+100 = ? 老 师心里正想,这下子小朋友一定要算到下课了吧!正要借口出去时,却被高斯 叫住了!! 原来呀,高斯已经算出来了,小朋友你可知道他是如何算的吗? 高 斯告诉大家他是如何算出的:把1加至100 与100 加至 1 排成两排相加, 也就是说:1+2+3+4+ ..... +96+97+98+99+100 100+99+98+97+96+ ..... +4+3+2+1 =101+101+101+ ..... +101+101+101+101 共有一百个101相加,但算 式重复了两次,所以把10100 除以2便得到答案等于<5050> 从此以后高斯
船舶耐波性总结 第一章耐波性概述 一、海浪的描述、、。 船舶耐波性是船舶在波浪中运动特性的统称,它包括船舶在波浪中所产生的各种摇荡运动以及由这些运动引起的抨击、飞溅、上浪、失速、螺旋桨飞车和波浪弯矩变化等性能,直接影响船舶在风浪作用下维持正常功能的能力。 二、6个自由度的摇荡运动 船舶任意时刻的运动可以分解为在Oxyz坐标系内船舶中心G沿三个坐标轴的直线运动及船体绕三个坐标轴的转动。而这些运动中又有直线运动和往复运动 垂荡对船舶航行影响最大,是研究船舶摇荡运动的主要内容。船舶摇荡是指船舶在风浪作用下产生的摇荡运动,他们的共同特点是在平衡位置附近做周期性的震荡作用。产生何种摇荡运动形式取决于船首方向与风浪船舶方向之间的夹角,称为遭遇浪向。 三、动力响应 船舶耐波性是船舶在风浪中性能的总的反应,它主要包括船舶摇荡、砰击、上浪、失速、螺旋桨飞车。 剧烈的横摇、纵摇和垂荡对船舶产生一系列有害的影响,甚至引起惨重后果,主要表现在以下三个方面: 1)、对适居性的影响; 2)、对航行使用性的影响; 3)、对安全性的影响; 船舶在风浪中产生摇荡运动时,船体本身具有角加速度和线加速度,因此属于非定常运动。 第二章海浪与统计分析 2-1 海浪概述 风浪的三要素:风速、风时、风区长度。 风浪要素定义:表观波长、表观波幅、表观周期。 充分发展海浪条件:应有足够的风时和风区长度。 海浪分类:风浪、涌浪、近岸浪。 风浪的要素表示方法:统计分析方法。
2-2规则波的特性 波面可以用简单的函数表达的波浪称为规则波。 A 0=cos kx -t ξξω() A k ξξω为波面升高,为波幅,为波数,为波浪圆频率。 在深水条件下,波长T c λ、周期和波速之间存在以下关系 : ≈ 2 =1.56T λ; c==1.25T λλ; 2= T πω; 2k=g ω 波浪中水质点的振荡,并没有使水质点向前移动,也没用质量传递。但是水 质点具有速度且有升高,因此波浪具有能量。余弦波单位波表面积的波浪所具有 的能量2A 1E=g 2 ρξ 2-3不规则波理论基础 一、不规则波的基本概念 1、确定性关系和统计关系 我们所讨论的不规则波引起的船舶摇荡运动等都是属于统计规律范畴之内的。 2、不规则波叠加原理 为了便于问题的讨论,我们假定不规则波是由许多不同波长、不同波幅和随机相位的单元波叠加而成的。考虑到不规则波的随机性,不规则波的波面升高方程为: An n 0n n n=1=cos k x -t+ξξωε∞ ∑() 随机相位n ε可以取0到2π间的任意值。 二、随机过程 1、随机过程 每一个浪高仪的记录代表一个以时间为变量的随机过程t ξ(),它是许多记录中的一个“现实”。所有浪高仪记录的总体表征了整个海区波浪随时间的变化,称为 “样集”。 2平稳随机过程 1)考虑时间12t=t t=t 、等处的统计特性,称为横截样集的统计特性。 2)考虑随时间变化的统计特性,称为沿着样集的统计特性。 3、各态历经性 对于平稳随机过程,当样集中每一个现实求得的统计特性都是相等的,而且样集在任一瞬时的所有统计特性等于在足够长时间间隔内单一现实的所有统计特性,满足这样条件的平稳随机过程称为具有各态历经性。 三、随机过程中的概率分布 1、随机性的数字特征
船舶操纵性:是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变其航速、航向和位置的能力。航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。 回转性:表示船舶在一定舵角作用下作圆弧运动的性能。转首性:表示船舶应舵转首并迅速进入新的稳定状态的性能. 运动稳定性与机动性制约:小舵角下的航向保持性 、中舵角下的航向机动性 、大舵角下的紧急规避性 固定与运动坐标系的关系: 漂角:速度V 与OX 轴正方向的夹角β。舵角:舵与OX 轴之间的夹角δ。舵速角:重心瞬时速度矢量与O 0X 0轴之间的夹角ψ0。 线性水动力导数意义:船舶作匀速直线运动,在其他参数不变时,改变某一运动参数所引起的作用于船舶的水动力或矩对该参数的变化率。水动力导数:Xu= Yu= 通常可称对线速度分量u 的导数为线性速度导数.如:Xu 等。对横向速度分量v 的导数为位置导数,如:Yv 、Nv 等。对回转角速度r 的导数为旋转导数,如:Nr 、Yr 等。对各加速度分量和角加速度分量的导数为加速度导数Xu 。 ,对舵角δ的导数为控制导数,如:Y δ等。 稳定性:对处于定常运动状态的物体(或系统),若受到极小的外界干扰作用而偏离原定常运动状态;当干扰去除后,经过一定的过渡过程,看是否具有回复到原定常运动状态的能力。若能回复,则称原运动状态是稳定的。直线稳定性:船舶受到瞬时扰动以后,重心轨迹最终恢复成为一条直线,但航向发生了变化。方向稳定性:船舶受到的瞬时扰动消失以后,重心轨迹最终成为原航线平行的另一直线。位置稳定性:船舶受到瞬时扰动,当扰动消失以后,重心轨迹最终恢复成为与原来航线的延长线。 稳定衡准数:C=-Y V (mx G u 1-N r )+N V (mu 1-Y r );C>0 表示船舶在水平面的运动具有直线稳定性;C<0 则不具有直线稳定性。 影响航向稳定性的因素:(1)为改善其航向稳定性,应使Nr 、Yv 二者的负值增加,从C 的表达式可见,此二者之乘积的正值就越大,显然有利于改善稳定性。(2) Nv 对稳定性的影响较大。只要Nv 为正值,船舶就能保证航向稳定性 (3)若沿船纵向设置升力面(如鳍、舵等能产生升力的物体),则将其加在首或尾部都能使Nr 的负值增加,但若加在首部会使Nv 增加负值,而加在尾部会使Nv 变正,故升力面设置在尾部可使Nr 负值增加的同时又使Nv 值变正,故对航向稳定性的贡献比设置在首部要大。与几何形体的关系:增加船长可使Nr 负值增加,增加船舶纵中剖面的侧面积可使Nr 、Yv 的负值增加,增加Nv 的有效方法是,增加纵中剖面尾部侧面积,可采用增大呆木,安装尾鳍,使船产生尾倾等。 船舶回转性各参数:反横距:从船舶初始的直线航线至回转运动轨迹向反方向最大偏离处的距离为S1。正横距:从船舶初始直航线至船首转向90°时,船舶重心所在位置之间的距离为S2。该值越小,则回转性就越好。纵距:从转舵开始时刻船舶重心G 点所在的位置,至船首转向90°时船舶纵中剖面,沿原航行方向计量的距离S3。其值越大,表示船舶对初始时刻的操舵反应越迟钝战术直径:从船舶原来航线至船首转向180°时,船纵中剖面所在位置之间的距离DT 。其值越小,则回转性越好。定常回转直径:定常回转阶段船舶重心点圆形轨迹的直径D 进程R ′:自执行操舵点起至回转圈中心的纵向距离;R′=S3-D/2;它表示船舶对舵作用的应答性,R′越小则应答性越好 回转过程的三个阶段: 转舵阶段:指从开始转舵到舵转至规定角度δ0为止。运动特点:V 。 ≠0 ,r 。≠0 ,v=r=0;过渡阶段:指从转舵结束起到船舶进入定长回转运动为止。运动特点:V 。 、r 。 、V 、r 都不为零且随时间发生变化。 定长回转阶段:当作用于船体的力和力矩相平衡时,船舶就以一定的侧向速度V 和回转角速 度r 绕固定点作定长圆周运动。特点:V 。=r 。 =0,v 、r 为常数。 枢心点P :船舶回转过程中,在船上还存在一个横向速度分量为零的点,称为枢心点p 。枢心点是船舶纵中线上唯一的漂角为零的点;枢心点仅仅是因为船舶转向而存在的;船舶加速时,枢心点会向船舶运动的方向移动 。反操现象:是船舶不具有直线稳定性的一种特征,回转性与稳定性相矛盾。回转衡倾的原因:船舶回转过程中,船体上承受的侧向力其作用点高度各不相同,于是形成对ox 轴的倾侧力矩,产生回转横倾。 野本模型:T r 。+r 。 =K δ 其中 K 、T 为操纵性指数。用参数K 评估回转能力。大K 意味着回转性能好。用参数T 评估直线运动稳定性、初始回转能力和航线改变能力。小T 意味着好的直线运动稳定性、初始回转能力和航线改变能力。K= T= 希望船舶有大K 、小T (但相互矛盾)。T 的单位是S ,K 的单位是S -1 转首性指数p :表示操舵后,船舶行驶一倍船长时,由单位舵角引起的首相角改变量。 诺宾指数:若平>0.3则转首性满足要求。与船体惯性 回转阻尼 舵的回转力矩相关。 操纵性试验:分为模型试验和实船试验两种,模型试验又可分为自由自航模操纵性试验和约束模操纵性试验两种。船舶固有操纵性的试验方法:回转试验、回舵试验、零速启动回转试验、Z 试验、螺线与逆螺线试验、航向改变试验、制动试验和侧向推进装置试验。 回转试验: 1首先在预定的航线上保持船舶直航和稳定航速。 2在开始回转前约一个船长的航程范围内,测量船舶的初始参数,如:航速u 、初始航向角、初始舵角、螺旋桨的初始转速n 0等。 3以尽可能大的转舵速度将舵操至规定舵角δ0并把定舵轮。随后开始测量船舶运动参数随时间的变化,包括船舶的轨迹、航速、横倾角及螺旋桨的转速等。 4待首向角改变540°时,即可结束试验。 螺线试验:评价船舶的直线稳定性,在直航中给船舶以扰动,通过观察扰动去掉后船舶是否能够恢复直航来测定直线稳定性。 1.首先在预定航线上保持匀速直航,并在操舵前测出初始航速、舵角及螺旋桨转速。 2. 执行操舵,以尽可能快的速度将舵转至一舷规定的舵角(如右舷15°) 并保持舵角不变,使船进入回转运动,待回转角速度r 达到稳定值时,记录下r 和相应的舵角δ值。 3. 改变舵角值重复以上过程,测出定常r 值及相应δ值。舵角从右舷15°开始,并按下列次序改变:右15°→右10°→右5°→右3°→右1°→ 0°→左1°→左3°- 左5°→左10°→左15° Z 形操舵试验:测定船舶操舵响应的一种操纵性试验法。进行Z 形试验时,先使船以规定航速保持匀速直航,然后将舵转至右舷规定的舵角(如右舷10°) ,并保持之,则船即向右转向,当首向角达到某一规定的舵角值时(如右舷10°) 立即将舵向左转至与右舵角相等的左舵角(左舷10°) ,并保持之。当反向操舵后,船仍朝原方向继续转向,但向右转首角速度不断减小,直至消失。然后船舶应舵地再向左转向,当左转首向角与舵角值相同时,再向右操舵至前述之右舵角。该过程如此继续,到完成五次操舵为止。 航向改变试验是研究船舶在中等舵角时的转向性能的一种较简易而实用的试验方法。 回舵试验是船舶航向稳定性的定义试验。该试验方法实质为回转试验(或螺线试验)的延续 操纵性船模试验中必须满足的相似条件:1使自航船模与实船保持几何形状相似;2通常保持无因次速度、加速度参数相等,即u/V 、v/V 、rL/V 等相等;3在水动力相似方面,只满足傅汝德数Fn 相等,保证二者重力相似。 实际进行自航模试验时保持:船体几何形状相似;质量、重心位置及惯性矩相似;在决定模型尺度时要考虑临界雷诺数的要求;选择航速时满足傅汝德数相等;机动中保持舵角相等。 船舶固有操纵性指标:直接的判据:它是由自由自航试验直接测定的参数;间接的判据:如野本的K 、T 指数,诺宾的P 指数 操纵性衡准:1回转能力,由回转试验确定。船舶以左(右)350 舵角回转时,回转圈的纵距应
数学趣味小知识 1、一个人花8块钱买了一只鸡,9块钱卖掉了,然后他觉得不划算,花10块钱又买回来了,11块卖给另外一个人.问他赚了多少? 答案:2元 2、假设有一个池塘,里面有无穷多的水.现有2个空水壶,容积分别为5升和6升.问题是如何只用这2个水壶从池塘里取得3升的水. 答案:先用5升壶装满后倒进6升壶里,在再将5升壶装满向6升壶里到,使6升壶装满为止,此时5升壶里还剩4升水,将6升壶里的水全部倒掉,将5升壶里剩下的4升水倒进6升壶里,此时6升壶里只有4升水,再将5升壶装满,向6升壶里到,使6升壶里装满为止,此时5升壶里就只剩下3升水了 3、一个农夫带着三只兔到集市上去卖,每只兔大概三四千克,但农夫的秤只能称五千克以上,问他该如何称量. 答案:先称3只,再拿下一只,称量后算差. 4、有只猴子在树林采了100根香蕉堆成一堆,猴子家离香蕉堆50米,猴子打算把香蕉背回家,每次最多能背50根,可是猴子嘴馋,每走一米要吃一根香蕉,问猴子最多能背回家几根香蕉? 答案:25根,先背50根到25米处,这时,吃了25根,还有25根,放下.回头再背剩下的50根,走到25米处时,又吃了25根,还有25根.再拿起地上的25根,一共50根,继续往家走,一共25米,要吃25根,还剩25根到家. 5. 兄弟共有45元钱,如果老大增加2元钱,老二减少2元钱,老三增加到原来的2倍,老四减少到原来的1/2,这时候四人的钱同样多,原来各有多少钱? 答案:老大8 老二12 老三5 老四20 6.一根绳子两个头,三根半绳子有几个头?答案:8个(半根绳子也是两个头) 7.一栋住宅楼,爷爷从一楼走到三楼要6分钟,现在要到6楼,要走多少分钟? 答案:15分钟
船舶耐波性能试验 —阻尼系数测量试验 学生姓名: 学号: 学院:船舶与建筑工程学院班级: 指导教师:
一、船模横摇试验的目的 上风浪中航行最易发生横摇,而且横摇的幅度较大,不仅影响船 员生活和工作的各个方面,严重的横摇还会危及船舶的安全乃至倾覆失事。因此,在有关耐波性的研究中,首先关注的是要求设计横摇性能优良的船舶。 由于船舶在波浪中横摇运动的复杂性,理论计算尚未达到可用于实际的程 度,因而模型试验是目前预报船舶横摇最可靠的方法。 本教学试验由下列两部分组成,即: 1.船模在静水中的横摇衰减试验,目的是确定船的固有周期以及作用在船 体上的水动力系数,如附连水惯性矩及阻尼系数等。据此可根据线性运动方程计算船舶在风浪中的横摇频率响应曲线。 2.船模在规则波中的横摇试验,目的是确定船的横摇频率响应函数,可用 于预报船舶在中等海况下的横摇统计特性,对于高海况的预报数值则偏高,这是由于非线性影响的缘故。 二.实验原理 通过《船舶原理》课程的学习,我们知道船舶的横摇运动方程可以表示为: 式中,表示横摇角、横摇角速度、横摇角加速度;Ixx’表示船 舶在水中的横摇惯性矩,等于船舶在空气中的横摇惯性矩Ixx 与船舶在水中的横摇附加惯性矩之和;N为阻尼力矩系数;D为排水重量;h为横稳性高度;αm0为有效波倾;ω为波浪圆频率。 引入横摇衰减系数γ和横摇固有(圆)频率ωФ ωФ2=Dh/Ixx’ 横摇运动方程可以写成: 静水中自由横摇 考虑船舶在初始时刻浮于静水面上,并伴有一个静横倾角φ0,但不受波浪的作用,该船舶随后将作自由横摇运动,其表达式可以写成 式中,无因次衰减系数μ和相位超前角β为
耐波性作业 一、某船实测的纵摇幅值的统计表如下。 雷利用分布的参数为j K j j a P R ∑==12 )(θ,其中j a )(θ是第j 间隔中的幅值平均值。要 求: (1)作直方图; (2)假定纵摇幅值满足雷利分布,即 R a a a e R f 2 2)(θθθ- ?=,在直 方图上作出)(a f θ曲线。 (3)计算平均纵摇角R a 886.0=θ;三一平均纵摇角R a 416.1)(3/1=θ; 十一平均纵摇角R a 8.1)(10/1=θ 二、按不规则波上的纵摇估算表计算下列船舶的纵摇统计特性
(V g e 2 ,180ωωωβ+ ==)。 已知:三一平均波高4)2(3/1=A ρ米;船速V=6.37米/秒。 其中波谱)(ωρS 按12届ITTC 单参数公式计算。 三、已知某船船长L=147.18米,船宽B=20.40米,排水量D=16739吨,型深H=12.40米,重心高度z g =8.02米,初稳性高度h=1.2米, 阻尼系数2μ=0.12。 (1) 求横摇固有周期; (2) 横摇的放大因数为()2 2 2 2411 φ φμαφΛ +Λ-= mo A , 请按下列波浪频率计算横摇放大因数,ω=0, 0.1,0.3,0.4,0.458, 0.5,0.6,0.7,0.9,1.1,1.3,∞。 四、排水量为10000吨,初稳性高度h 为0.90米的船舶的横摇固有
周期为14秒。若在重心的上面2米处减少1000吨的重量,问新的横摇周期是多少?(稳心M 的位置认为不变,由于重心的改变,要求绕新的GX 轴的转动惯量)。 五、已知某船横摇周期T=13秒,初稳性高度h=1米,无因次阻尼衰减系数μ=0.10,计算: (1)使船发生共振的波长; (2)若波浪最大倾角为4 /10534.0-=λα(弧度),求共振时最大振幅; (3)假使该船由于载荷分布发生改变(排水量不变),总的质量惯性矩降低了10%,欲使固有周期不变,问初稳性高度改变了多少?在此新情况下,假定阻尼力矩系数2N 保持不变,试求共振横摇角度。 六、已知某货船的船宽B=20.40米,吃水T=8.04米,重心高度z g =8.02米,初稳性高度h=1.20米,舭龙骨比A b /LB=0.033,航行I 类航区。试计算该船的横摇角。 七、已知某船吃水T=8.02米,垂向棱形系数χ=0.70,计算该船的纵摇固有周期。 八、试按“实船试验数据分析表”,利用下表数据,计算某船纵摇幅
第一章船舶操纵基础理论 通过本章的学习,要求学员概念理解正确,定义描述准确,对船舶操纵性能够正确评估,并具有测定船舶操纵性能的知识。 根据船舶操纵理论,操纵性能包括: 1)机动性(旋回性能和变速运动性能) 2)稳定性(航向稳定性) 第一节船舶操纵运动方程为了定量地描述船舶的操纵运动,我们引入船舶操纵运动方程,用数学方法来讨论船舶的运动问题。 一、船舶操纵运动坐标系 1.固定坐标系Ox0y0z0 其原点为O,坐标分别为x0,y0,z0,由于我们仅讨论水面上的船舶运动,因此,该坐标系固定于地球表面。 作用于船舶重心的合外力在x0,y0轴上的投影分别为X0和Y0 对z0轴的合外力矩为N
2. 运动坐标系Gxyz 其原点为点G (船舶重心),坐标分别为x ,y ,z ,该坐标系固定于船上。 这主要是为了研究船舶操纵性的方便而建立的坐标系。 x ,y ,两个坐标方向的运动速度分别为u 和v ,所受的外力分别为X 和Y , 对z 轴的转动角速度为r ,z 轴的外力矩为N 。 二、 运动方程的建立 根据牛顿关于质心运动的动量定理和动量矩定理,船舶在水面的平面运动可由下列方程描述: y 0
??? ??===? Z og o og o I N y m Y x m X 该式一般很难直接解出。为了方便,将其转化为运动坐标系表示,这样可以使问题大为简化。经过转换,得: ?? ? ??=+=-=r I N ur v m Y vr u m X Z )()( 该方程看似复杂,但各函数和变量都与固定坐标系没有关系,因此,可以使问题大为简化。 三、 水动力和水动力矩的求解 对于上述方程中的水动力和水动力矩可表示为: ?? ? ??===),,,,,,(),,,,,,(),,,,,,(δδδr v u r v u f N r v u r v u f Y r v u r v u f X N Y X
数学趣味小故事 Prepared on 24 November 2020
1. 小马虎数鸡 : 春节里,养鸡专业户小马虎站在院子里,数了一遍鸡的总数,决定留下 ,1/2外,把1/4慰问解放军,1/3送给养老院。他把鸡送走后,听到房内有鸡叫,才知道少数了10只鸡。于是把房内房外的鸡重数一遍,没有错,不多不少,正是留下1/2的数。小马虎奇怪了。问题出在哪里呢你知道小马虎在院里数的鸡是多少只吗 2.来了多少客人:一天,小林正在家里洗碗,小强看见了问道:“怎么洗那么多的碗”“家里来了客人了。”“来了多少人”小林说:“我没有数,只知道他们每人用一个饭碗,二人合用一个汤碗,三人合用一个菜碗,四人合用一个大酒碗,一共用了15个碗。”你知道来了多少客人吗 3.找零钱:一家手杖店来了一个顾客,买了30元一根的手杖.他拿出一张50元的票子,要求找钱.店里正巧没有零钱,店主到邻居处把50元的票子换成零钱,给了顾客20元的找头.顾客刚走,邻居慌慌张张地奔来,说这张50元的票子是假的.店主不得已向邻居赔偿了50元.随后出门去追那个顾客,并把他抓住说:“你这个骗子,我赔给邻居50元,又给你找头20元,你又拿走了一根手杖,你得赔偿我100元的损失.”这个顾客却说:“一根手杖的费用就是邻居给你换零钱时你留下的30元,因此我只拿了你70元.”请你计算一下,手杖店真正的损失是多少这里要补充一下,手杖的成本是20元.如果这个顾客行骗成功,那么共骗得了多少钱 4、故事:猴子捞帽:一群猴子在井旁玩,一阵风将一只猴子的帽子吹到井里,他招呼来18个小伙伴,从井上方的松上一个接一个去捞帽子,有4只猴子没有上树,就捞着了帽子,问:是几只猴子上树下井接在一起把帽子捞上来的 5.故事:蜗牛何时爬上井一只蜗牛不小心掉进了一只枯井里,它趴在井底上哭起来,一只癞蛤蟆过来,翁声翁气的对蜗牛说:“别哭了,小兄弟,哭也没用,这井壁又高又滑,掉到这里只能在这里生活了。我已经在这里生活了许多年了。蜗牛望着又老又丑的癞蛤蟆,心里想:“井外的世界多美呀!我决不能像它那样生活在又黑又冷的井底里。”蜗牛对癞蛤蟆说:“癞大叔,我不能生活在这里,我一定要爬出去,请问这口井有多深”“哈哈哈……,真是笑话,这井有10米深,你小小年纪。又背负着这么重的壳,怎么能爬出去呢”“我不怕苦不怕累,每天爬一段,总能爬出去!”第二天,蜗牛吃得饱饱的,开始顺着井壁往上爬了,它不停的爬呀爬,到了傍晚,终于爬了5米,蜗牛特别高兴,心想:“照这样的速度,明天傍晚我就可以爬出去了。”想着想着不知不觉睡着了,早上,蜗牛被一阵呼噜声吵醒了,一看,原来是癞大叔还以睡觉,他心里一惊:“我怎么离井底这么近”原来,蜗牛睡着以后,从井壁上滑下来4米,蜗牛叹了一口气,咬咬牙,又开始往上爬,到傍晚又往上爬了5米,可晚上,蜗牛又滑下来4米,就这样,爬呀爬,滑呀滑,最后坚强的蜗牛终于爬上了井台。聪明的小朋友你能猜出来蜗牛用了多少天才爬上井台的吗 搞错帐目(打一个数学名词)( 误差)讨价还价(打一数学名词)商数七十二小时(打一字)=晶 逐次说明(打一个数学名词)分解你盼着我,我盼着你(打一个数学名词)相等 成绩是多少(打一个数学名词)几何诊断以后(打一个数学名词)开方协议离婚。约分 两牛打架(打一个数学名词)对顶角并肩前进(打一数学名词)平行考试作弊(打一数学名词)假分数 剃头(打一数学名词)减法不用再说。(猜数学名词)已知寻找单据(打一数学名词)求证 下完围棋(打一数学名词)分子完全合算(打一数学名词)绝对值勤点钞票(打一数学名词)常数 东坡游春(打一数学家名字)苏步青合法开支(打一数学名词)有理数用手算(打一数学名词)指数 风筝跑了(打一数学名词)线段一减一不是零(打一字)答案:三大同小异(打一数学名词).相似 道路没弯儿(数学名词) ——直经最高峰(数学名词) ——顶点七天七夜. (数学名词) ——周长 从后面算起(猜数学名词)倒数朱元璋登基;消元;搬来数一数(猜数学名词)——运算
1.什么是船舶耐波性? 船舶耐波性是指船舶在波浪扰动下,产生各种摇荡运动、抨击、甲板上浪、失速、螺旋桨出水以及波浪弯矩等,仍能维持一定航速在波浪中安全航行的性能。(P1) 2.什么是有效波面? 船宽、吃水相对波长是很小时,可近似认为船是水中一质点,它所受的浮力近似垂直于波面。当船宽和吃水相对波长为有限尺度时,由于船宽范围内波形曲率的变化以及沿船体水下表面所受到的浮力方向与波面法向不一致,使船受到的总浮力有所减小,同时其浮力作用线是垂直于某一次波面,这一次波面称为有效波面。(P17) 3.船舶阻尼力(矩)按物理性质大致可分为哪三类? 兴波阻尼、旋涡阻尼、摩擦阻尼(P8) 4.船在水中可能产生六个自由度的摇荡运动,分别是什么运动? 横摇、纵摇、首摇、垂荡(升沉)、横荡和纵荡 5.研究船舶耐波性用到的三种坐标系是哪三种,可画图说明? 空间固定坐标系:该坐标系用来描述海浪; 动坐标系Gxbybzb:随船做摇荡运动,坐标原点取在船的重心G上,坐标轴取作与船的中心惯性主轴相重合,Gxb在船中线面与龙骨线平行,向艏为正;Gzb在船中线面内垂直于Gxb,向上为正;Gyb垂直于船的中线面,向右舷为正。 随船移动的平衡坐标系Oxyz:当船在静水中以航速v航行时,该坐标系随船同速前进,Oxy位于静水面上,Ox正向与航速v同向。当船在波浪上做摇荡运动时,该坐标系不随船做摇荡,仍保持按船的平均速度和原航向前进。 6.船模实验需要满足的相似律有那几个? 几何相似、运动相似、动力相似。(P136-P137) 7.什么是船舶摇荡运动的兴波阻尼?(P9) 由于船舶运动使水面产生波浪,消耗船本身的能力所造成的阻尼。傅汝德认为兴波阻尼与速度一次方成比例。 8.目前采用较广泛的减摇装置有哪些? 舭龙骨、减摇水舱、减摇鳍(P168) 9.什么是有效波面角?
漂角:船舶重心处速度与动坐标系中ox轴之间的夹角,速度方向顺时针到ox轴方向为正。首向角:船舶纵剖面与固定坐标系OX轴之间的夹角,OX到x轴顺时针为正 舵角:舵与动坐标系ox轴之间的夹角,偏向右舷为正 航速角:重心瞬时速度与固定坐标系OX轴的夹角,OX顺时针到速度方向为正 浪向角:波速与船速之间的夹角。 作用于船体的水动力、力矩将与其本身几何形状有关(L、m、I),与船体运动特性有关(u、v、r、n),也与流体本身特性有关(密度、粘性系数、g)。 对线速度分量u的导数为线性速度导数,对横向速度分量v的导数为位置导数,对回转角速度r的导数为旋转导数,对各角速度分量和角加速度分量的导数为加速度导数,对舵角的导数为控制导数。 直线稳定性:船舶受瞬时扰动后,最终能恢复指向航行状态,但是航向发生了变化; 方向稳定性:船舶受瞬时扰动后,新航线为与原航线平行的另一直线; 位置稳定性:船舶受瞬时扰动后,最终仍按原航线的延长线航行; 具备位置稳定性的必须具备直线和方向稳定性,具备方向稳定性的必定具有直线运动稳定性。 1.定常回转直径 2.战术直径 3.纵距 4.正横距 5.反横距 回转的三个阶段 一、转舵阶段二、过度阶段三、定常回转阶段 耦合特性:船舶在水平面内作回转运动时会同时产生横摇、纵摇、升沉等运动,以及由于回转过程中阻力增加引起的速降。以上所述可理解为回转运动的耦合,其中以回转横倾与速降最为明显。 Tr r Kδ += 回转性指数K是舵的转首力矩与阻尼力矩系数之比,表征船舶转首性, 应舵指T 是惯性力矩数系数与阻尼力矩系数之比, 由T=I/N可见:参数T是惯性力矩与阻尼力矩之比,T值越大,表示船舶惯性大而阻尼力矩小;反之,T值越小,表示船舶惯性小而阻尼力矩大。 由K=M/N可见:参数K是舵产生的回转力矩与阻尼力矩之比,K值越大,表示舵产生的回转力矩大而阻尼力矩小;反之,K值越小,表示舵产生的回转力矩小而阻尼力矩大。 K值越大,相应回转直径越小,回转性越好.T为小正值时,船舶具有良好的航向稳定性. K表示了回转性,T表示了应舵性和航向稳定性。舵角增加:K、T同时减小;吃水增加:K、T 同时增大;尾倾增加:K、T同时减小;水深变浅:K、T同时减小;船型越肥大:K、T 同时增大。 船舶操纵性设计的基本原则是:给定船的主尺度(即船的惯性),以提供必要和足够的流体动力阻尼及舵效,使之满足设计船舶所要求的回转性、航向稳定性和转首性。通常最常用的办法是改变舵面积,因为舵既有明显的航向稳定作用,又会产生回转力矩。
小学数学趣味性教学 一、小学生的心理发展特征 1.小学生的学习动机。调查结果表明,整个小学阶段,主导的学习动机是:⑴为了好分数,不落人后,或为了得到表扬和奖励而学习。⑵为履行组织交给自己的任务,或为集体争光而学习。这表明小学生一般还不善于把学习和社会需要联系起来,其学习动机往往是直接与学习活动联系在一起的。年级越低,学习动机越具体,学习动机更多地与学习活动本身直接联系,与学习兴趣发生联系或受兴趣的左右。 2.小学生的学习兴趣。最初对学习的外部活动感兴趣,逐渐对学习的内容感兴趣;从不分化到逐渐产生对不同学科内容的初步分化;从具体事实和经验的知识较有兴趣到对抽象因果关系的知识感兴趣。 3.小学生思维发展特点。在整个小学时期,小学生的思维逐渐过渡到以抽象逻辑思维为主,但仍带有很强的具体性;小学生的思维由具体形象思维到抽象逻辑思维的过渡,存在着一个明显的“关键年龄”;小学生逐渐具备了人类思维的完整结构,同时这个思维结构还有待进一步完善和发展。 二、传统的小学数学课堂教学方法与当前课堂的教学方法的比较 教学方法是指特定的课程与教学目标,受特定课程内容所制约的、为师生共同遵循的教与学的操作规范和步骤,它是引导、调节教学过程的规范体系。我国传统的教学方法主要是提示型的教学方法,如叙述讲解法、演示法、练习法等,对于问题解决的教学方法和自主型的教学方法应用较少,主要源于教师对于传统课程教学形成了公式化的教学模式,缺乏改革意识和创新精神,从而使得小学课堂缺乏活力,许多低年级的学生从一二年级起便开始对于数学失去了兴趣,这是典型的教育失败结果。因此,新课改倡导教学方法的多样化,教师应根据学习任务和目标设计多样化的教学方法,对于同样的教学方法可以有不同的行为方式,教学方法在一堂课程中往往是交替使用。新课程改革的教学方法强调学生的学习参与,通过引起学生注意、给予学生关切、帮助学生树立学习数学的信心以及使学生在学习过程中得到成功的满足。而趣味性教学对于小学低年级的学生来说是非常重要的,可以充分激发和调动学生学习的积极主动性,促使学生主动自觉参与,进而不断提高小学低年级数学课堂教学的质量与效率。 三、新课标对当前小学数学教学的要求 根据《义务教育数学课程标准》(2011年版),可以了解到新课标对于当前小学数学的教学要求包括以下三个方面:⑴小学数学教学应当体现出基础性、普及性与发展性。新课标中要求体现出小学数学教学的基础性,基础性就是“三基性”,即数学中包含的基础知识、基本技能与基本概念。⑵小学数学教学应当体现出数学的价值。在小学数学教学的过程中要重视数学的价值教育,即要重视数学应用功能的发挥,重视数学在发展学生综合素质方面作用的发挥。⑶重视学生的主体性。 四、营造趣味性课堂的教学方法 在小学低年级数学趣味性教学中,组织活动形式多样与激发学生好奇心理尤其重要。所以,在小学低年级数学教学中,必须牢固树立以学生为主体的教育观念,以学生的全面健康和谐发展为重点,以实现学生的人生价值为最终目标,积极认真地组织开展形式多样的趣味活动,激发学生的好奇心理。这样,就可以使小学低年级数学课堂教学充满趣味与活力,进而不断提高学生的学习能力。“在游戏活动中,轻松自如地学习数学,教学工作者需要认识到数学作为一门理论性强、逻辑性强的综合学科,光依靠传统教学意义上的“照本宣科”式教学方法是很难在小学生心底引起共鸣,是难以被小学生所接受的,只有将这些看似枯燥、乏味的数学知识通过游戏活动的方式呈现在小学生面前,让小学生参与到活动中,才能实现小学生想象力与创造力的和谐发展。趣味性课堂教学方法主要有:⑴创设生活情境,激发学习兴趣。数学本身是一门融逻辑、推理、概括和综合等为一体的以数理为主线的自然学科。⑵提出挑战问题,开拓创新思维。⑶教师辅助引导,学生主体发挥。⑷组织合作学习,共同进步。⑸结合现实教学,渗透德育教育。在教学情境中体验数学的趣味,在生活实践中体验数学的价值,在自主合作中体验数学的探索
船舶操纵与摇荡
————————————————————————————————作者:————————————————————————————————日期:
船舶操纵与摇荡期末总复习 考试题目类型: 1. 名词解释(5题) 2. 填空(10题左右,空不限) 3. 画图题(1~2题左右) 4. 简答题(5~6题左右) 5. 计算分析题(2题) 考试内容(操纵性): 第一章绪论 1. 操纵性的定义?操纵性包括哪些方面的内容? 答:所谓操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。船舶操纵性包括以下四方面内容: A、航向稳定性:它是指船舶在水平面内的运动受扰动而偏离平衡位置,当扰动完全消除后,保持原有航向运动的性能; B、回转性:它是指船舶应舵作圆弧运动的性能; C、转首性及跟从性:它是指船舶应舵转首及迅速进入新的稳定运动状态的性能。前者称为转首性,后者称为跟从性; D、停船性能:它是指船舶对惯性停船和倒车停船的响应性能。 第2章船舶操纵 1、描述船舶运动的坐标系?什么是首向角、漂角以及航速角(定义及正负号)? 答:为了描述船舶的运动,我们常采用一下两种右手坐标系:a、固定坐标系Oxyz,它是固定在地球表面的右手坐标系,其原点O可以任意选择,通常与t=0时船舶重心G的位置相一致。Xy平面位于静水面内,z轴垂直向下为正。b、运动坐标系Gxyz,它是以船舶重心位置G为原点而固定于船体上的直角坐标系。x、y和z轴分别是经过G的水线面、横剖面和中纵剖面的郊县,x轴向首为正,z轴向下为正。 首向角:船舶的重心位置和船舶中纵剖面与x轴交角,称为首向角。由x轴转到中纵剖面顺时针为正。 漂角:船舶重心处的速度矢量V与x轴正方向的交角称为漂角,规定由速度矢量转到x 轴顺时针方向为正。 航速角:Xo轴到V的夹角,顺时针为正。 2、水动力导数(回答要全面)?水动力模型? 水动力导数的物理意义(位置导数、旋转导数、角加速度导数以及舵导数,要求会分析其正负号) 答:水动力导数: 水动力模型: 3. 船舶运动稳定性包含哪三部分?(直线、方向、位置,其相互之间的关系) 答:直线稳定性:船舶受瞬时扰动后,最终能恢复直线航行状态,但航向发生变化;方向稳定性:船舶受扰后,新航线为与原航线平行的另一直线; 位置稳定性:船舶受扰后,最终仍按原航线的延长线航行。 显然,具有位置稳定性必同时具有方向和直线稳定性,具有方向稳定性必同时具有直线