台达伺服电机及驱动器(中低功率)
- 格式:pdf
- 大小:18.08 MB
- 文档页数:18
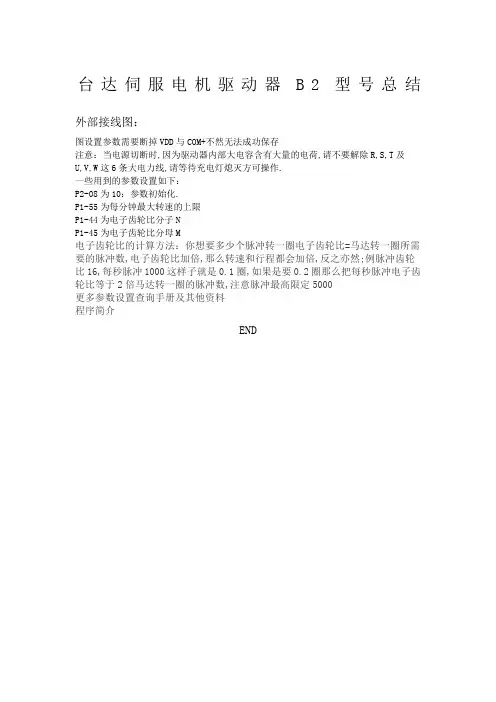
台达伺服电机驱动器B2型号总结
外部接线图:
图设置参数需要断掉VDD与COM+不然无法成功保存
注意:当电源切断时,因为驱动器内部大电容含有大量的电荷,请不要解除R,S,T及U,V,W这6条大电力线,请等待充电灯熄灭方可操作.
一些用到的参数设置如下:
P2-08为10:参数初始化.
P1-55为每分钟最大转速的上限
P1-44为电子齿轮比分子N
P1-45为电子齿轮比分母M
电子齿轮比的计算方法:你想要多少个脉冲转一圈电子齿轮比=马达转一圈所需要的脉冲数,电子齿轮比加倍,那么转速和行程都会加倍,反之亦然;例脉冲齿轮比16,每秒脉冲1000这样子就是0.1圈,如果是要0.2圈那么把每秒脉冲电子齿轮比等于2倍马达转一圈的脉冲数,注意脉冲最高限定5000
更多参数设置查询手册及其他资料
程序简介
END。
三相機種的變頻器是否可以接單相入力電源?台達變頻器為單相及三相機種,其最大的差異在於電容的配置。
單相機種會配置比較大的電容,因此若三相機種只接單相入力,可能導致輸出電流不足,且會發生欠相的異常。
為確保系統正常運行,請搭配使用正確的電源系統。
變頻器使用在硬體上需加裝PG卡,在PG卡上的開關設置編碼器為Open-Collector或是Line-Driver型式,並設置正確的電壓大小。
在參數上,設定編碼器每轉的脈波數及輸入脈波型式。
以台達VFD-VE系列變頻器為例,選用EMV-PG01X的PG卡,且編碼器一圈有1024個脈波,為Open-Collector 12V型,此時,PG卡需設置(如下圖)在參數設定方面,需設定參數10-00每轉脈波數為1024。
另外,在設定10-01之前,需先確定該編碼器的脈波型式為AB相、脈波加方向或單一脈波,再加以設定。
之後只要將參數00-04設為7,就可以在使用者顯示的內容看到馬達實際由編碼器回授的轉速。
無感測向量控制a.優異開迴路速度控制,不必滑差補償b.在低度時有高轉矩,不必提供過多之轉矩增強c.更低損耗,更高效率d.更高動力響應- 尤其是階梯式負載e.大馬達有穩定之運轉f.在電流限制,改善滑差控制有較好之表現在台達交流馬達驅動器的輸入電源輸入側電抗器用於變頻器/驅動器輸入端,電抗器保護著靈敏電子設備使其免受變頻器產生的電力雜訊干擾(如電壓凹陷、脈衝、失真、諧波等),而藉由電抗器吸收電源上的突波,更能使變頻器受到良好的保護。
變頻器/驅動器輸出側電抗器在長距離電纜接線應用中,使用IGBT保護型電抗器於馬達與變頻器之間,來減緩dv/dt值及降低馬達端的反射電壓。
使用負載電抗器於輸出端,可抑制負載迅速變化所產生的突波電流,即使是負載短路亦可提供保護。
何謂控速比可控速範圍是以馬達的額定轉速為基準,在定轉矩操作區中為維持額定轉矩,其額定轉速與最低轉速的比值,例如一典型交流伺服馬達的可控速範圍為1000:1,亦即若馬達的額定轉速為2000 rpm/min,其最低轉速為2 rpm/min;而且在此控速範圍內,由無載至額定負載時,其轉速誤差百分比值均能滿足所設定的控速精度,如+-0.01%。
台达伺服工作原理台达伺服系统是一种广泛应用于工业自动化领域的控制系统,它通过控制电机的运动来实现精确的位置控制和速度控制。
台达伺服系统由伺服电机、伺服驱动器和控制器三部分组成,下面将详细介绍台达伺服系统的工作原理。
1. 伺服电机伺服电机是台达伺服系统的核心部件,它能够将电能转化为机械能,提供动力驱动机械设备。
伺服电机一般采用直流电机或交流电机,具有高转速、高精度和高可靠性的特点。
伺服电机通常由定子和转子组成,定子上绕有线圈,转子上带有永磁体或电枢。
当电流通过定子线圈时,会产生磁场,磁场与永磁体或电枢之间的相互作用会使转子转动。
2. 伺服驱动器伺服驱动器是控制伺服电机运动的关键部件,它接收来自控制器的指令,通过控制电流的大小和方向来控制伺服电机的运动。
伺服驱动器一般由功率放大器、速度环和位置环组成。
- 功率放大器:负责将控制信号放大到足够的电流,以驱动伺服电机。
功率放大器通常采用PWM(脉宽调制)技术,通过调整脉冲的宽度和频率来控制电流的大小和方向。
- 速度环:负责控制伺服电机的转速。
速度环通过比较伺服电机的实际转速和设定转速,计算出速度误差,并根据误差调整输出电流的大小和方向,使伺服电机的转速接近设定值。
- 位置环:负责控制伺服电机的位置。
位置环通过比较伺服电机的实际位置和设定位置,计算出位置误差,并根据误差调整输出电流的大小和方向,使伺服电机的位置接近设定值。
3. 控制器控制器是台达伺服系统的核心部件,它接收来自外部的指令,并将指令转化为控制信号发送给伺服驱动器。
控制器通常由微处理器、编码器、接口电路和控制算法组成。
- 微处理器:负责接收和处理来自外部的指令,计算出控制信号,并将控制信号发送给伺服驱动器。
- 编码器:用于测量伺服电机的实际位置和转速。
编码器通常由光电传感器和编码盘组成,当伺服电机转动时,光电传感器会检测编码盘上的刻线,从而测量出伺服电机的实际位置和转速。
- 接口电路:负责将控制信号转化为伺服驱动器能够识别的信号,并将伺服驱动器的反馈信号传输给控制器。
伺服电机应用行业总结现代交流伺服系统最早被应用到宇航和军事领域,比如火炮、雷达控制。
逐渐进入到工业领域和民用领域。
工业应用主要包括高精度数控机床、机器人和其他广义的数控机械,比如纺织机械、印刷机械、包装机械、医疗设备、半导体设备、邮政机械、冶金机械、自动化流水线、各种专用设备等。
其中伺服用量最大的行业依次是:机床、食品包装、纺织、电子半导体、塑料、印刷和橡胶机械,合计超过75%。
在数控机床中使用永磁无刷伺服电机代替步进电机做进给已经成为标准,部分高端产品开始采用永磁交流直线伺服系统。
在主轴传动中采用高速永磁交流伺服取代异步变频驱动来提高效率和速度也成为热点•无轴(电子轴)传动技术在印刷机上应用,也是目前全球印刷企业和机械制造商的焦点。
无轴传动就是用多个单独的伺服电机取代传统的机械传动链,伺服驱动器之间依靠高速现场总线进行联系,通过软件保证各伺服轴对内部的虚拟数字电子轴保持严格同步。
采用无轴传动技术为印刷机的生产制造、为印刷业服务革命带来了最佳解决方案,目前欧洲50%的凹印机采用了无轴技术,日本也有30%以上采用。
其他采用无轴传动的机械包括卷筒纸印刷机、柔印机、上光机、烫金机、模切机等各类印刷设备。
这一领域最顶级的伺服控制解决方案提供商是来自德国的博世力士乐、伦茨、日本的住友和奥地利的贝加莱。
国内目前仅有北人和松德等个别厂家进行无轴传动印刷机的开发,部分规格的性能指标接近国际水平,但是其采用的电子轴传动伺服系统和套准控制系统均来自日本和欧洲,国内相关伺服厂家还鲜有涉足。
国产伺服和控制系统要达到这个领域的要求,需要顶级的技术水平和对这个行业的透彻理解,看来还有漫长的路要走。
•包装设备上,采用伺服控制可以提高单位时间的产量、提高资源利用率、增加品种适应性和提高产品质量,因此交流伺服在包装机械上的广泛使用只是时间问题。
采用数字伺服技术的电子齿轮和电子凸轮将代替传统机械部件,随着价格的下降,成本也逐渐接近纯机械的方案。
台达伺服工作原理一、引言台达伺服是一种广泛应用于自动化控制系统中的电动执行器,它能够精确控制机械设备的运动,实现高速、高精度的位置、速度和力控制。
本文将详细介绍台达伺服的工作原理,包括其组成结构、工作原理和应用领域。
二、组成结构台达伺服由伺服电机、伺服驱动器和编码器三部分组成。
1. 伺服电机:伺服电机是台达伺服系统的核心部件,它通过转换电能为机械能,驱动机械设备的运动。
伺服电机通常由定子、转子、绕组和磁铁组成。
其中,定子是固定不动的部分,绕组则是由导线绕制而成的线圈,磁铁则产生磁场,与绕组相互作用产生力矩,驱动转子旋转。
2. 伺服驱动器:伺服驱动器是伺服系统的控制核心,它接收控制信号,并通过调节电流、电压和频率等参数,控制伺服电机的运动。
伺服驱动器通常由功率电源、控制电路和保护电路组成。
功率电源为伺服电机提供所需的电能,控制电路则接收外部的控制信号,并将其转换为适合伺服电机的驱动信号,保护电路则用于监测伺服系统的工作状态,一旦出现异常情况,会自动停止伺服电机的运动,保护系统的安全。
3. 编码器:编码器是伺服系统的反馈装置,它能够实时监测伺服电机的位置、速度和力等参数,并将其转换为数字信号,反馈给伺服驱动器。
伺服驱动器通过与编码器的比较,实现对伺服电机的闭环控制,确保其运动的准确性和稳定性。
三、工作原理台达伺服的工作原理可以简单概括为接收控制信号、驱动伺服电机、实现闭环控制。
1. 接收控制信号:台达伺服系统通过控制信号来控制伺服电机的运动。
控制信号通常由上位机或PLC等控制设备发送给伺服驱动器,其中包括位置指令、速度指令和力指令等。
伺服驱动器接收到控制信号后,会根据信号的不同参数进行解析和处理,以确定伺服电机的运动方式。
2. 驱动伺服电机:伺服驱动器通过调节电流、电压和频率等参数,驱动伺服电机的运动。
伺服驱动器会根据控制信号的要求,调整输出的电流和电压,以控制伺服电机的转速和力矩。
通过精确控制电流和电压的大小,伺服驱动器能够实现对伺服电机运动的精确控制。
台達伺服驅動器使用指南台達伺服驅動器使用指南1. 簡介台達伺服驅動器是一種先進的控制設備,用於控制伺服馬達,實現高精度且可靠的運動控制。
本指南將詳細介紹台達伺服驅動器的使用方法和注意事項,以幫助您充分利用它的潛力。
2. 了解台達伺服驅動器的基本原理在使用台達伺服驅動器之前,了解它的基本工作原理非常重要。
伺服驅動器通過控制電壓和電流來實現對伺服馬達的控制。
它使用反饋機制來監測馬達轉子位置,並根據所需的運動軌跡調整控制信號。
這種精確的控制使得伺服馬達能夠實現高運動精度和快速響應。
3. 安裝和連接伺服驅動器在安裝和連接伺服驅動器之前,請確保您已閱讀並理解相關的安全手冊和操作指南。
按照指南中提供的步驟進行操作,確保正確安裝和連接驅動器。
請注意,正確的連接至關重要,因為錯誤的連接可能導致系統故障或馬達損壞。
4. 基本參數設置在使用台達伺服驅動器之前,您需要設置一些基本參數,以確保驅動器能夠正確運行。
這些參數通常包括馬達額定參數、控制方式、速度和加速度限制等。
通常,您可以通過驅動器的設置界面或相應的設置軟件進行這些設置。
5. 運動控制設定台達伺服驅動器提供了多種運動控制模式,包括位置模式、速度模式和扭矩模式。
根據您的應用需求,選擇合適的控制模式並進行相應的設置。
另外,您還可以設置運動軌跡、運動速度和加速度等參數,以實現所需的運動效果。
6. 監控和診斷台達伺服驅動器提供了豐富的監控和診斷功能,可以實時監測驅動器和馬達的狀態。
這些功能包括電流監測、溫度監測、震動監測等,可以幫助您了解系統的運行狀態並及時處理問題。
在使用伺服驅動器的過程中,定期檢查和監測這些參數是非常重要的。
7. 故障排除和維護在使用伺服驅動器時,可能會遇到一些故障和問題,如異常噪音、性能下降或系統錯誤等。
在這種情況下,您應該根據相關的故障排除指南進行操作。
另外,定期進行保養和檢修也是確保系統正常運行的關鍵。
總結:台達伺服驅動器是一種先進的控制設備,提供了高精度和可靠的運動控制功能。
台达A2伺服配线及操作伺服系统是现代工业自动化中的重要组成部分,具有高性能、高精度、高可靠性等优点。
其中,台达A2伺服是一种高性价比的伺服系统,广泛应用于各种自动化设备中。
本文将详细介绍台达A2伺服配线及操作方法。
一、伺服系统组成1.1伺服驱动器:伺服驱动器是伺服系统中的核心部件,负责接收控制信号并控制伺服电机输出相应的转矩和速度。
台达A2伺服驱动器具有多种保护功能,如过流,过压,过热等保护,可有效保护系统。
1.2伺服电机:伺服电机是伺服系统的执行部件,通过接收驱动器控制信号来实现精确的位置和速度控制。
台达A2伺服电机具有高速响应,低噪音,高功率密度等特点。
1.3编码器:编码器是用来反馈电机实时位置信息的设备,可以保证伺服系统的运动精度。
台达A2伺服系统支持多种编码器接口,如绝对值编码器,增量编码器等。
1.4控制器:控制器负责生成伺服系统的控制信号,并对反馈信号进行处理,以实现闭环控制。
台达A2伺服系统支持多种控制方式,如位置控制,速度控制,力控制等。
二、伺服系统配线2.1电源接线:伺服系统的电源接线非常重要,必须按照驱动器和电机的额定电压和功率要求进行连接。
一般情况下,电源接线应该使用优质的电缆,并保证接线牢固可靠。
2.2信号接线:伺服系统的信号接线包括控制信号和反馈信号。
控制信号一般是通过控制器发送给驱动器的指令,而反馈信号用于电机实时位置的反馈。
信号接线也要保证牢固可靠,并且不要出现干扰情况。
2.3地线接线:地线接线是伺服系统中非常重要的一环,它可以有效减小系统的噪声,并保证系统的稳定性。
在连接地线时,应尽量选择独立的地线进行接地,避免共用。
2.4信号连接:在安装伺服系统时,需要根据系统手册中提供的接线图进行连接,确保每条信号线连接正确。
在连接过程中注意防止短路和接触不良等问题。
三、伺服系统操作3.1参数设置:在使用台达A2伺服系统之前,需要对其进行参数设置,包括电机参数,速度参数,位置参数等。
台达伺服驱动器摘要:本文档旨在介绍台达伺服驱动器的基本原理、特点和应用领域,并提供有关安装、调试和维护的一些常见问题的解决方案。
台达伺服驱动器是一种高性能驱动器,广泛应用于自动化控制系统中的运动控制和精密定位应用。
1. 引言台达伺服驱动器是一种先进的电机驱动控制设备,可以实现高精度的运动控制和快速响应。
它采用了先进的控制算法和数字信号处理技术,可与伺服电机配合使用,提供高速、高精度和可靠的运动控制性能。
2. 工作原理台达伺服驱动器通过反馈控制实现对电机的精确控制。
它接收控制信号,并通过闭环反馈系统将电机的实际位置与期望位置进行比较,然后计算并调整电机的输出来使两者保持一致。
这种闭环控制系统使得台达伺服驱动器具有较高的控制精度和鲁棒性。
3. 特点与优势台达伺服驱动器具有许多特点和优势,使其成为运动控制领域的理想选择。
首先,它具有高分辨率的位置反馈能力,可以实现高精度的位置和速度控制。
其次,它采用了先进的数字信号处理技术和控制算法,具有快速响应的特点,能够有效地减小误差和振荡。
此外,台达伺服驱动器还具有较高的功率密度和高效的能耗管理,能够在小尺寸和低功耗的同时提供强大的控制能力。
4. 应用领域台达伺服驱动器广泛应用于自动化控制系统中的运动控制和精密定位应用。
它们在工业自动化、机器人控制、数控加工、包装系统、半导体制造和医疗设备等领域都有重要的应用。
台达伺服驱动器可以满足不同应用的需求,提供精确的定位和高速的运动控制,提高生产效率和产品质量。
5. 安装与调试在安装和调试台达伺服驱动器时,需要注意一些关键步骤。
首先,确保电源和信号线路的正确连接,以防止电机和驱动器损坏。
其次,进行参数设置和校准,以确保驱动器与电机的匹配和正确工作。
最后,进行系统的调试和性能测试,以验证驱动器的运动控制性能和精度。
6. 维护与故障排除台达伺服驱动器在使用过程中可能会遇到一些故障和问题。
一些常见的故障包括电源故障、电机过载、过热和通信错误。
台达伺服工作原理引言:台达伺服系统是一种广泛应用于工业自动化领域的控制系统,它能够精确控制电机的位置、速度和力矩,从而实现高精度、高效率的运动控制。
本文将详细介绍台达伺服系统的工作原理及其组成部分。
一、伺服系统的基本原理伺服系统由伺服电机、伺服驱动器和编码器组成。
伺服电机负责产生运动,伺服驱动器负责控制电机的运动参数,编码器用于反馈电机的实际运动情况。
伺服系统通过不断比较编码器反馈的位置信息与控制器设定的位置指令,通过控制器对伺服驱动器发送控制信号,从而实现对电机的精确控制。
二、伺服电机的工作原理伺服电机采用的是交流电机或直流电机,其工作原理基本相同。
以直流伺服电机为例,它由电枢、永磁体和电刷组成。
当电流通过电枢时,产生的磁场与永磁体的磁场相互作用,从而产生转矩。
伺服电机的转矩与电流成正比,因此通过控制电流可以实现对电机转矩的精确控制。
三、伺服驱动器的工作原理伺服驱动器是伺服系统的核心部件,其主要功能是根据控制信号调节电机的转矩、速度和位置。
伺服驱动器通常包含了控制器、功率放大器和保护电路。
控制器负责接收来自编码器的反馈信号和控制指令,根据控制算法生成控制信号。
功率放大器将控制信号放大后送给电机,从而驱动电机按照控制信号的要求运动。
保护电路则用于监测电机的工作状态,如过流、过热等,并及时采取保护措施。
四、编码器的工作原理编码器是伺服系统的反馈装置,用于实时监测电机的位置和速度。
编码器通常采用光电、磁电或电容原理,将电机的运动转化为电信号。
光电编码器通过光电传感器和编码盘的相互作用,将光电信号转化为脉冲信号。
磁电编码器则利用磁场变化产生感应电动势,将电机运动转化为电信号。
编码器的输出信号经过放大和处理后送回伺服驱动器,与控制器的指令进行比较,从而实现闭环控制。
五、伺服系统的应用领域伺服系统广泛应用于各种自动化设备和机器人中。
例如,工业机械设备中的定位、定长、定位精度要求较高的工作环节常常采用伺服系统实现。
高手分享:台达伺服调机实例伺服系统应用广泛,凡是需要精度控制的场合都离不开伺服系统。
伺服系统一般由伺服驱动器和伺服电机构成,当然作为自动化设备的一部分,伺服系统还要和其他控制器(如PLC、触摸屏)等一道组成整个自动化系统。
伺服控制系统有三种控制方式:定位控制、速度控制和转矩控制,其中以定位控制居多,转矩控制也常用到,而速度控制用的相对较少,是因为变频调速已经非常成熟,无论开环还是闭环,都有很好的表现,且价格比伺服系统低很多,功率又大很多,因此单独用伺服来调速的较少。
看起来很普通的伺服驱动器,其实智能化程度很高,过流、过压、缺相、短路、抗干扰、自动调节等功能都具备,但有的需要通过设置启用该功能。
所谓伺服调机,是指出现特殊故障,如启动转矩不足、出现共振造成输出不稳定、低速性能不理想、停机后仍然有“抖动”等不常见的故障时排除故障的一种方法或途径。
这里是一个台达伺服调机的例子:3KW的伺服电机,驱动器型号ASDA-AB,运行中出现停机不稳(偶尔出现停机后再“抖动”或多余进给),严重时造成ALM06号报警(过载),影响生产,需要解决。
鉴于后面需用到的一些伺服参数,在此先期介绍:P0-02:驱动器状态显示(可显示运行速度、转矩、转动惯量比等)P1-37:伺服电机惯量比P2-23:共振抑制Notch filter(带拒滤波器)P2-24:共振抑制Notch filter衰减率P2-25:共振抑制低通滤波P2-31:自动模式刚性及频宽设定P2-32:增益调整方式P0-02:用于驱动器液晶显示屏显示可显示的内容有17项(00-16),调机用到14:负载/电机惯量比,也就是说我们要将P0-02设置为“14”(出厂为“00”),P0-02常用项含义如下:00:电机反馈脉冲数(绝对值)[pulse]02:脉冲命令脉冲计数[pulse]04:控制命令脉冲与反馈脉冲误差数[pulse]06:电机转速[r/min]11:平均转矩[%]12:峰值转矩[%]13:主回路电压[Volt]14:负载/电机惯性比[time]P1-37:伺服电机惯量比是指负载的惯量除以电机本身的惯量的比值。
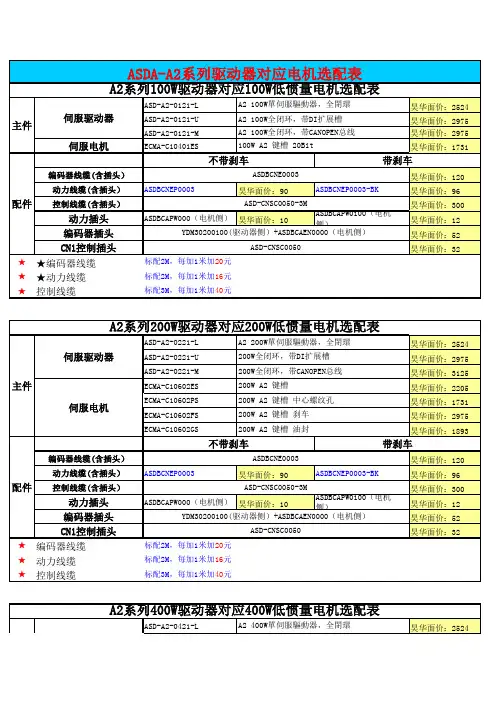
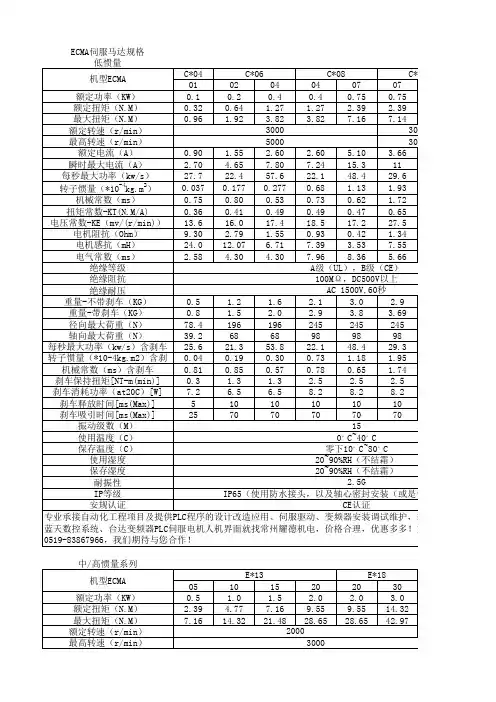
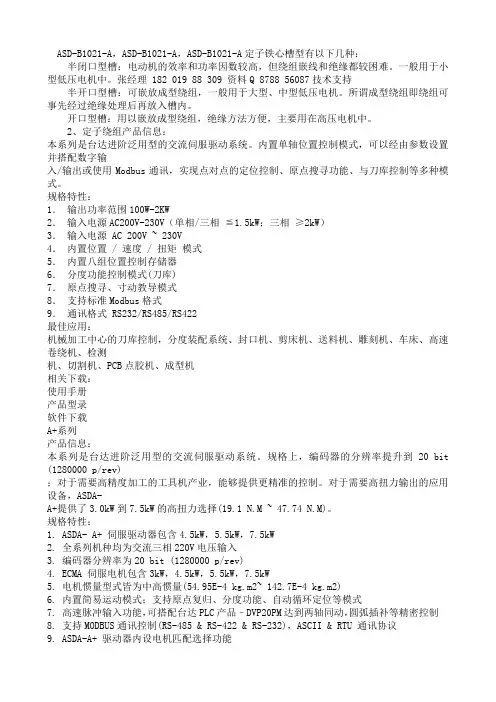
台达伺服电机A2系列常用型号台达ASD-A2系列常用型号系列功率型号详情ASDA-A2 100W ASD-A2-0121-L A2 100W基础型全闭环ASDA-A2 100W ECMA-C10401GS 带油封带键槽ASDA-A2 100W ECMA-C10401HS 键槽油封刹车ASDA-A2 200W ASD-A2-0221-L A2 200W基础型全闭环ASDA-A2 200W ECMA-C10602RS 带键槽带中心螺纹孔油封ASDA-A2 200W ECMA-C10602SS 带键槽带中心螺纹孔油封刹车ASDA-A2 400W ASD-A2-0421-L A2 400W基础型全闭环ASDA-A2 400W ECMA-C10604RS 带键槽带中心螺纹孔油封ASDA-A2 400W ECMA-C10604SS 带键槽带中心螺纹孔油封刹车ASDA-A2 400W ECMA-E11305RS A2 500W 带键槽带中心螺纹孔油封ASDA-A2 400W ECMA-E11305SS A2 500W 带键槽带中心螺纹孔油封刹车 ASDA-A2 400W ECMA-G11303RS A2 300W 带键槽带中心螺纹孔油封ASDA-A2 400W ECMA-G11303SS A2 300W 带键槽带中心螺纹孔油封刹车ASDA-A2 400W ECMA-C10804R7 A2 400W 带键槽带中心螺纹孔油封80框ASDA-A2 400W ECMA-C10804S7 A2 400W 带键槽带中心螺纹孔油封刹车80框ASDA-A2 750W ASD-A2-0721-L A2 750W基础型全闭环ASDA-A2 750W ECMA-C10807RS 带键槽带中心螺纹孔油封ASDA-A2 750W ECMA-C10807SS 带键槽带中心螺纹孔油封刹车ASDA-A2 750W ECMA-G11306RS 带键槽带中心螺纹孔油封ASDA-A2 750W ECMA-G11306SS 带键槽带中心螺纹孔油封刹车ASDA-A2 1KW ASD-A2-1021-L A2 1KW基础型全闭环ASDA-A2 1KW ECMA-C10910RS 低惯量,1KW,键槽,86框号,油封ASDA-A2 1KW ECMA-C11010RS 1KW 带键槽带中心螺纹孔油封轻惯量ASDA-A2 1KW ECMA-C11010SS 1KW 带键槽带中心螺纹孔油封刹车轻惯量ASDA-A2 1KW ECMA-E11310RS 1KW 带键槽带中心螺纹孔油封ASDA-A2 1KW ECMA-E11310SS 1KW 带键槽带中心螺纹孔油封刹车ASDA-A2 1KW ECMA-G11309RS A2 900W 带键槽带中心螺纹孔油封ASDA-A2 1KW ECMA-G11309SS A2 900W 带键槽带中心螺纹孔油封刹车需要采购变频器PLC伺服电机人机界面就联系常州耀德机电,我们将为您提供最优质的产品和周到快捷的服务,如需要安装调试电话联系0519-********,我们期待与您合作!ASDA-A2 1.5KW ASD-A2-1521-L A2 1.5KW基础型全闭环ASDA-A2 1.5KW ECMA-E11315RS A2 1.5KW 带键槽带中心螺纹孔油封ASDA-A2 1.5KW ECMA-E11315SS A2 1.5KW 带键槽带中心螺纹孔油封刹车ASDA-A2 2KW ASD-A2-2023-L A2 2KW基础型全闭环ASDA-A2 2KW ECMA-C11020RS A2 2KW 带键槽带中心螺纹孔油封轻惯量ASDA-A2 2KW ECMA-C11020SS A2 2KW 带键槽带中心螺纹孔油封刹车轻惯量ASDA-A2 2KW ECMA-E11320RS A2 2KW 带键槽带中心螺纹孔油封ASDA-A2 2KW ECMA-E11320SS A2 2KW 带键槽带中心螺纹孔油封刹车ASDA-A2 2KW ECMA-E11820RS A2 2KW 带键槽带中心螺纹孔油封180框 ASDA-A2 2KW ECMA-E11820SS A2 2KW 带键槽带中心螺纹孔油封刹车180框ASDA-A2 3KW ASD-A2-3023-L A2 3KW基础型全闭环ASDA-A2 3KW ECMA-E11830RS A2 3KW 带键槽带中心螺纹孔油封ASDA-A2 3KW ECMA-E11830SS A2 3KW 带键槽带中心螺纹孔油封刹车ASDA-A2 3KW ECMA-F11830RS A2 3KW 带键槽带中心螺纹孔油封大惯量ASDA-A2 3KW ECMA-F11830SS A2 3KW 带键槽带中心螺纹孔油封刹车大惯量ASDA-A2 3KW ECMA-E11330EP A2 3KW 130框键槽中心螺纹孔裕人专用ASDA-A2 4.5KW ASD-A2-4523-L A2 4.5KW基础型全闭环 ASDA-A2 4.5KW ECMA-F11845RS 4.5KW 带键槽带中心螺纹孔油封ASDA-A2 4.5KW ECMA-F11845SS 4.5KW 带键槽带中心螺纹孔油封刹车ASDA-A2 5.5KW ASD-A2-5523-L A2 5.5KW基础型全闭环ASDA-A2 5.5KW ECMA-F11855R3 带键槽带中心螺纹孔油封ASDA-A2 5.5KW ECMA-F11855S3 5.5KW 带键槽带中心螺纹孔油封刹车ASDA-A2 7.5KW ASD-A2-7523-L A2 7.5KW基础型全闭环ASDA-A2 7.5KW ECMA-F11875R3 带键槽带中心螺纹孔油封ASDA-A2 7.5KW ECMA-F11875S3 带键槽带中心螺纹孔油封刹车。
台达ASDA-AB参数表台达ASDA-AB参数表ASDA-AB是台达电气推出的一款高性能伺服驱动器,具有出色的性能和可靠性。
以下是ASDA-AB的参数表,包括输入和输出参数。
输入参数:1.电源电压:AC 200V-230V,单相/三相2.频率范围:50/60 Hz3.控制方式:位置控制、速度控制、力矩控制4.指令输入:脉冲指令、模拟电压指令、Modbus TCP/IP指令5.脉冲输入方式:CW/CCW、AB相差分、A/B相黏连、4X脉冲6.模拟输入方式:电压输入、电流输入7.通信接口:RS-232、RS-485、Modbus TCP/IP、CANopen、EtherCAT输出参数:1.输出电流:0.5A-30A2.峰值输出电流:1.5倍额定电流3.输出功率:100W-7.5kW4.控制精度:±0.01%(速度/位置控制模式)5.响应时间:≤1ms(速度/位置控制模式)6.输出频率范围:0-1000 Hz7.输出电压范围:0V-电源电压8.过载能力:150%持续运行,200%短时运行保护功能:1.过流保护2.过压保护3.过热保护4.缺相保护5.短路保护6.过载保护其他特点:1.支持电机类型:伺服电机、步进电机、直流无刷电机2.具有位置锁存功能,可在停止状态下锁定位置3.多种运动控制模式:点位运动、连续运动、Jog运动4.支持多种编码器反馈方式:绝对值编码器、增量编码器5.可编程IO接口,可根据需要进行定制6.支持多个伺服驱动器之间的同步运动ASDA-AB是台达电气为满足不同应用需求而推出的一款高性能伺服驱动器,具备丰富的功能和可靠的性能。
以上参数表详细描述了ASDA-AB的输入和输出参数以及其他特点,为用户提供了全面的信息,可根据实际需求选择合适的型号。