道路路阻函数模型及适用性研究
- 格式:pdf
- 大小:272.49 KB
- 文档页数:4



交通拥堵状态预测模型研究与应用近年来,随着城市化进程的加快以及人口增加,交通拥堵问题日益突出,特别是在大城市中,交通拥堵现象更加普遍。
拥堵不仅浪费了人们宝贵的时间,同时还造成了巨大的经济损失。
因此,交通拥堵状态预测模型研究与应用对于优化交通管理、提高交通流效率和减小能源消耗具有积极意义。
一、交通拥堵状态预测模型的研究方法在交通拥堵问题中,预测模型是解决问题的重要手段之一。
现在常用的交通拥堵状态预测模型有:基于物理模型的交通流模型,基于数据挖掘的时间序列分析模型,基于机器学习的神经网络模型等。
其中,基于物理模型的交通流模型主要通过数学建模来模拟交通流量,而基于数据挖掘的时间序列分析模型则是采用历史交通数据来预测未来交通流量。
基于机器学习的神经网络模型则是通过大量数据来训练神经网络,并预测未来的交通拥堵情况。
二、交通拥堵状态预测模型应用案例交通拥堵状态预测模型在交通管理和规划中得到广泛的应用。
以北京市交通拥堵为例,针对北京市的道路拥堵情况,包括拥堵时段、路段、交叉口等因素,北京市交通管理部门采用了基于机器学习的神经网络模型进行预测。
该模型利用历史交通数据进行训练,能够预测未来一段时间内的交通状况。
在实际使用过程中,北京市交通管理部门可根据预测结果进行交通路线调整,提高交通效率,减少拥堵。
此外,上海、广州等城市也在采用交通拥堵状态预测模型辅助交通管理。
上海市采用了基于物理模型的交通流模型来研究路网运行状态,分析交通流特征和运行情况,同时利用交通数据与历史数据,预测未来交通拥堵情况。
在实际交通管理中,在红绿灯设置、车道规划等方面采取了针对性的措施。
三、交通拥堵状态预测模型存在的问题目前,交通拥堵状态预测模型的研究还存在一些问题。
首先,现有模型预测精度难以满足实际应用需求,由于交通状况与时间、空间、天气等因素有关,预测精度受到各种因素的影响,需要多个数据源协同配合才能提高精度。
其次,现有模型多数只注重预测结果,缺乏过程分析,实现预测的同时还需要对拥堵过程进行分析,找出瓶颈所在,从而进行优化。

道路交通拥堵的动力学模型及调控策略研究道路交通拥堵一直是城市面临的难题,不仅影响了人们的出行体验,也给城市发展带来了不小的负面影响。
为了有效解决交通拥堵问题,需要深入研究交通拥堵的本质,并探索可行的调控策略。
本文将介绍道路交通拥堵的动力学模型及调控策略研究。
一、交通拥堵的动力学模型交通拥堵是一种典型的非线性动力学过程,其本质是人车交互作用的结果。
对于道路交通拥堵的动力学模型,现有的研究主要有两种:基于流体动力学的宏观模型和基于车辆行为的微观模型。
基于流体动力学的宏观模型主要针对高速公路等大范围的区域进行研究,其核心是利用流体流动的特性和宏观量(如流量、密度、速度)的变化规律来描述交通流的运动状态。
该模型优点在于对大范围的路段效果较好,但无法准确反映行车过程中的细节情况。
基于车辆行为的微观模型,主要考虑单个车辆的行驶过程,通过分析驾驶员的行为(如加速度、车速、间距)来构建交通行驶的运动模型。
该模型能较好地反映路段内车辆的行驶状态,但对于大范围区域的交通流动情况表示能力不足。
在实际应用中,可以根据具体情况选择适用的动力学模型,并进行参数调整,来模拟交通流量的变化规律,从而寻找有效的调控策略。
二、调控策略研究目前,针对交通拥堵调控的策略主要有三种:基础设施建设、交通管理措施和交通出行方式调整。
1. 基础设施建设通过增加车道、拓宽道路、增设制动输送设施等方式,改善交通道路的基础设施,来减少交通拥堵。
这种方法需要大量投入,且往往需要较长的建设周期,对于紧急性较高的交通拥堵缓解方案效果不佳。
2. 交通管理措施包括限行、限购、限速等方式,通过管理限制车辆的数量、速度,来降低道路的流量,达到缓解交通拥堵的目的。
这种方式对于紧急情况下的交通拥堵缓解效果较好,但缺点在于易引起公众不满,也会对城市经济发展产生不利影响。
3. 交通出行方式调整通过鼓励公共交通、非机动车出行,来减少私家车使用量,减轻道路流量,从而缓解交通拥堵。
交通拥堵预测模型研究与应用随着城市化进程的不断加速,城市中的交通问题变得越来越深刻。
交通拥堵对城市运行的正常性和经济发展都有着重要影响。
因此,研究交通拥堵预测模型,提高交通拥堵预测的准确性和可靠性,对于缓解城市交通状况、促进城市发展具有重要意义。
I. 交通拥堵预测模型研究1. 传统交通预测模型传统的交通预测模型主要基于统计学方法,如回归分析、时间序列分析等。
这些方法可以利用历史数据进行预测,但是受到数据样本不足、缺失数据等问题的影响,预测精度有限。
2. 基于机器学习的交通预测模型近年来,随着人工智能技术的发展,基于机器学习的交通预测模型逐渐成为研究热点,其中最常用的是神经网络和支持向量机。
(1)神经网络模型神经网络模型是基于人类神经系统的结构和功能进行机器模拟的一种模型。
其特点是可以自动识别数据中的模式,具有非线性、自适应、容错性强等优点。
在交通预测模型中应用较为广泛,常用的包括BP神经网络、RBF神经网络等。
(2)支持向量机模型支持向量机模型是一种基于统计学习理论的广义线性分类模型,其主要思想是通过一个超平面将不同类别的数据划分开来。
支持向量机模型具有非线性、小样本、高维等优势,可以根据不同的数据特征在不同分类器中进行优化选择。
II. 交通拥堵预测模型应用1. 交通监控和调度交通拥堵预测模型可以用于城市交通监控中,实时分析交通流数据,对交通状况进行监测、分析和预测。
同时,可以通过动态调整交通信号、优化道路路线、调整公共交通线路等措施,缓解交通拥堵状况。
2. 城市规划和交通管理交通拥堵预测模型可以为城市规划和交通管理工作提供决策依据。
通过基于实时交通数据的预测分析,可以调整城市规划中交通布局和交通设施建设,针对性地制定交通管理政策。
3. 公众出行和交通安全交通拥堵预测模型可以为公众出行提供可靠的交通信息,帮助公众合理调整路线和出行时间,避免长时间拥堵路段。
同时,交通拥堵预测模型还可以为交通安全提供科学依据,帮助公众避免拥堵区域高峰时刻的出行,减少交通事故的发生。
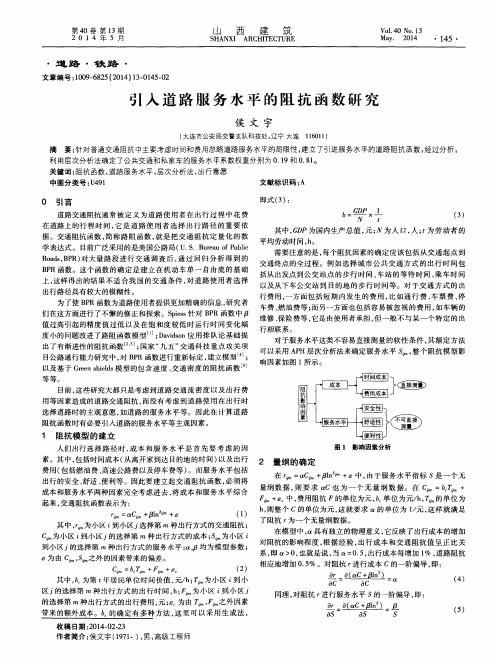
哈尔滨城市道路路阻函数的适用性研究
夏正浩;白辂韬;周继彪;郭延永
【期刊名称】《黑龙江工程学院学报(自然科学版)》
【年(卷),期】2009(023)003
【摘要】道路交通阻抗函数是交通分配的关键,决定着路径的选择.目前,广泛应用的路阻函数是美国联邦公路局BPR函数和回归路阻函数模型,其中前者只考虑机动车交通负荷的影响,使用比较方便;后者是针对我国混合交通的实际情况提出的.文中对两种甬数模型在哈尔滨市城市道路的适用性进行系统分析.
【总页数】3页(P39-40,44)
【作者】夏正浩;白辂韬;周继彪;郭延永
【作者单位】中交第一公路勘察设计研究院有限公司,陕西,西安,710075;中国市政工程东北设计研究院,吉林,长春,130021;山东交通学院交通与物流工程系,山东,济南,250023;山东交通学院交通与物流工程系,山东,济南,250023
【正文语种】中文
【中图分类】U491
【相关文献】
1.哈尔滨市利用既有人防隧道建设轨道交通的适用性研究 [J], 李海锋;宋键;顾保南;何永春;缪和平
2.基于同城化的北方城市道路冬季居民出行调查研究——以哈尔滨为例 [J], 张平;吉淑娥;李万平
3.道路路阻函数模型及适用性研究 [J], 周继彪;王露;孟现勇;金袁
4.城市道路路阻函数研究 [J], 王炜;张桂红
5.哈尔滨城市道路拥堵及治理对策 [J], 高曲南
因版权原因,仅展示原文概要,查看原文内容请购买。
14交通信息与安全2013年2期第3l卷总175期道路路阻函数模型及适用性研究*周继彪1王露1孟现勇2金袁3(1.长安大学公路学院西安710064;2.山东交院交通司法鉴定中心济南250100;3.北京中领工程咨询有限责任公司北京100034)摘要交通诱导系统中2节点间最优路径的选择是目前的1个难点问题,其中路阻函数的确定是路径优化的核心内容。
针对交通流由畅通状态到拥挤状态、堵塞状态的过程,应用经典交通流理论和实际调查数据,构建交通流诱导系统分段路阻函数模型,以q一10ve h/h为1个单位,对函数进行分段拟合,构建高速公路和城市快速路下的分段路阻函数,并对其适应性进行拟合分析。
应用结果表明:在不同的流量范围内,高速公路和城市快速路分段路阻函数在自由流状态、高密度状态和低密度条件下适合不同的分段函数。
关键词交通工程;路阻函数;交通流理论;道路交通;适应性中图分类号:U491文献标志码:A doi:10.3963/j.i s sn1674—4861.2013.02.0040引吾交通流诱导系统是智能交通系统(i nt el l i gentt r ans por t syst em,I T S)在交通运输领域的1个重要应用,也是目前国内I TS研究方向之一。
其路阻函数是进行公路网规划、交通诱导系统和交通分配的重要函数[1],决定着动态交通诱导和交通分配过程中路径的选择。
路阻函数是指路段行驶时间与路段交通负荷,交叉口延误与交叉口负荷之间的关系[2-a]。
对于动态路径诱导系统,最终的路径诱导结果取决于路网的路阻函数,而路阻函数的计算是基于历史行程时间数据、实时行程时间数据和预测行程时间数据3方面信息[4。
6]。
通常说来,根据准确的预测行程时间得到的优化路径是最有效的,然而交通网络非常复杂,预测的行程时间要满足实时性和准确性两方面要求绝非易事。
1路阻函数模型1.1当前路阻函数模型国际上已经被确定的路阻函数有[7。
1…:①美国公路局的(B PR)函数;②EM M E/2锥形延误函数;③Logi t延误函数;④A kcel i k延误函数;⑤基于BPR延误曲线的广义费用函数。
1.2模型构建交通流状态从畅通到拥堵状态、再到阻塞状态间的某个阶段会引起交通流状态的突变,其函数形式也会突然发生改变,即路阻函数已经不是1个连续函数,而是1个不同范围下的分段函数,本文重点构建不同密度条件下,流量关于时间的函数模型。
在自由流状态下,结合格林希尔茨(G r ee n s hi el ds)线性关系模型口一口f(1一k/ki)(1)口一l/t(2)q一是可(3)由式(1)、(2)、(3)3式联立化简得:饥t2一£志.7Jf t/q+Z2正,/q一0(4)解式(4)得t一厂。
(q)一k,z(功±~/口}一4q V f/k,)/(2q研)(5)在高密度交通流状态下,结合格林柏(G r een—ber g)对数关系模型:口一钉。
in(足./k)(6)由式(2)、(3)、(6)3式联立化简得(q e。
)/(Z k.)一eV m‘/t(7)收稿日期:2012—09—23修回E t期:20130305*国家自然科学基金项目(批准号:50808021)资助第一作者简介:周继彪(1986一),工学博士.研究向:交通运输规划与管理专业.E m a i l:zhoubi a0666@126.c or n道路路阻函数模型及适用性研究——周继彪王露孟现勇金袁15令(q e2)/(1k,)一A,则A£一evm‘,得训。
evm‘一A一0(8)解式(8)得户f2(q)一(1/Vm).h篙(9)在低密度交通流状态下,结合安德伍德(U n—der w ood)指数关系模型口一铆f e(-k)/‘m(10)由式(2)、(3)、(10)3式联立化简得q/(Z k。
)一(I nⅥt—i n Z)I t(11) t一厂(q)一J令q/(1km)一B,则B一(i n V f t—I n z)/t,即B t—I n饥t—i n Z(12)方程两边同时对t对导,得B一1/t(13)解式(13)得t—f3(q)一1/B—k。
l/q(14)由式(5)、(9)、(14)组合,可以得到新建立的分段路阻函数,即z(讪--t-~/孑二17_孑鬲)/(2q研)(q。
<q<q:)自由流状态/7)m).In_与生(q>q。
)高密度流状态(15) t‘宠;。
V ml/q(q<q,)低密度流状态式中:£为路段长度,m;口。
为临界速度,km/h;跳为畅行速度,km/h;是。
为最佳密度,veh/km;忌.为阻塞密度,veh/km。
口。
、ki、Z为实际调查数据;t 一.厂(q)不含有72。
2道路路阻函数适用性研究2.1数据调查2.1.1调查地点选择为了保证数据具有一定的代表性,并且能够较全面的反映整个路网情况,本次调查基于2010年浙江省公路O D调查部分数据,调查范围为浙江省全省域范围(包括省界),覆盖所有已建成的高速公路、国道、省道及部分重要县道(已纳入省道干线公路调整意见)。
调查点分布在:①全省所有高速公路出入口,包括主线和互通匝道收费站;②全省所有普通国省道干线公路路段的适当位置;③新省道调整利用的部分重要县道公路路段的适当位置。
同时为了增加对比性,调查地点又增加城市道路部分路段进行调查。
2.1.2调查方法选择2010年浙江省公路O D调查省内调查点采用“车牌照法”(即记录车辆类型及牌照号码)进行,省界调查点(包括高速公路和普通公路段)采用传统停车询问法(问询外省的出发地或目的地)进行。
为减少人工调查工作量并降低对正常交通的干扰,有条件的调查点尽量运用科技手段获取牌照信息。
省内高速公路出入口调查点、公安监控设备调查点的车辆牌照信息通过当日监控拍照获得,不安排人工调查。
其他调查点均通过人工调查获得。
2.1.3调查时间选择O D调查实施12h连续式调查,调查时间为当日07:00至19:00时;交通量调查实施24h连续式调查,调查时间为当日07:00至次H07:00时;车辆装载情况选择部分点抽样调查。
2.2道路路阻函数拟合分析基于交通调查数据,标定新建立函数的不同交通流状态下的适用范围。
分2种情况:2.2.1公路道路函数拟合浙江省高速公路限速120km/h,故取聃一120km/h.z一1km,根据G r eenshi el ds线性模型公式推算,堵塞密度可以达到近200veh/ki n[1],临界速度可以达到60km/h,最佳密度可达到近100veh/km,取忌;一200veh/km,"U m一60km/h,k。
一100km/h。
将实际调查数据代人式(15)中,结果见图1~图4。
2015寒Io5O010002000,30004000q/(veh h‘1图1自由流状态下(取“+”号)Fi g.1I n t he f r ee de nsi t y fl ow s t at e(t ake{I.+”num ber)由图1~图4可见,在低密度流交通状态下,当q<720veh/h时,曲线顺势下滑,之后逐渐趋于平稳;在高密度流交通状态下,当g>4420 veh/h 时,时间开始大于零;在自由流交通状态16交通信息与安全2013年2期第31卷总175期00083400008338专O0083360008334图2自由流状态下(取“一”号)Fi g.2I n t he f r ee densi t y f l ow s t at e(t ake“一’’num ber)q/(veh h“)图3高密度流状态下Fi g.3I n t he hi gh densi t y f l ow s t a t e0l000200030004000q/(veh h11图4低密度流状态下Fi g.4I n t he10W densi t y f l o w s t a t e下,取“+”号时,与低密度流状态下趋势一致,故舍去,取“一”号,q值的取值范围为720veh/h<q<4420veh/h。
故分段路阻函数模型为t=2^(q)一k,z(可,一以Fi≯i鬲)/2q让,4420ve h/h<q<720veh/h^(q)一(1/%)ln万亳{丢,q>442。
veh/h^(q)一是。
Z/q.q<:720veh/h(16)于平稳;在高密度流交通状态下,当q>3010veh/h时,时间开始大于零;在自由流交通状态下,取“+”号时,与低密度流状态下趋势一致,故舍去,取“一”号,q值的取值范围为560veh/h<q<3010veh/h。
141210l8“642O O图5自由流状态下(取“+”号)Fi g.5I nt he f r e e densi t y f l ow st a t e(t ake“+”n um be r)O012520o.012515专o01251000125052.2.2城市道路函数拟合本文以城市快速路为例,结合实际调查数据,根据G r eenshi el ds线性模型公式推算,堵塞密度可以达到近136veh/km[1],取研一80km/h,Z一1km,k。
一136veh/km。
将其代入式(15)中,结‘果见图5~图8。
由图5~图8可见,在低密度流交通状态下,当q<560veh/h时,曲线顺势下滑,之后逐渐趋一00.00—00.005001000150,020002500q/(veh‘h“)图7高密度流状态下Fi g.7I n t he hi g h densi t y f l ow s t a t eq/(v e h h“)图8低密度流状态下Fi g.8I n t he l ow densi t y f l o w s t a t e故分段路阻函数模型为厂,(q)一kj z(研一知F1Fi鬲)/2q73f,560ve h/h<q<3010veh/h ^(q)一(1/Vm).1n麓,q>3010veh/hf3(q)一k。
Z/q.q<560veh/h(17)道路路阻函数模型及适用性研究——周继彪王露孟现勇金袁173结束语以实际调查数据为基础,确定了不同流量条件下,高速公路道路和城市快速路的路阻函数模型,该模型对于研究道路交通网络中路径选择及结构优化有着重要的意义,同时也有助于道路交通仿真中路阻函数的计算和模拟。
根据实际调查的交通量和交通速度,以q一10veh/h为1个单位,对函数进行分段拟合。
拟合结果表明:1)在高速公路方面,在自由流交通状态下,即当720veh/h<q%4420veh/h时,符合分段路阻函数的t1,将正号舍去,取负号;在高密度流状态下,即当q>4420veh/h时,符合分段路阻函数的t。