航海仪器6
- 格式:doc
- 大小:36.50 KB
- 文档页数:2


航海仪器课程设计一、课程情况1.1 课程背景航海仪器是航海专业学生必修的一门课程,也是一门非常重要的课程。
在这门课程中,学生需要学习和掌握各种常用的航海仪器及其使用方法,这不仅能够提高学生的理论水平,同时还能提高其实践技能。
1.2 课程目标本课程的主要目标是帮助学生全面了解各种常用航海仪器的基本原理、结构、使用方法和注意事项,掌握其使用技能,提高学生的综合素质和实践能力。
1.3 课程内容本课程主要包括以下内容:•航海仪器基本原理•舵机和自动驾驶仪•船速测定仪•水文仪器•指南针和陀螺仪•船舶通信和气象设备二、教学方法本课程采用混合式教学方法,主要包括以下教学方式:2.1 理论讲授通过课堂讲解、PPT演示等方式,对各种航海仪器的基本原理、结构、工作原理、使用方法和注意事项进行详细阐述,以此提高学生的理论水平。
2.2 案例分析通过分析一些真实的航行事故案例,让学生理解航海仪器在实际航行中的重要性和使用方法,提高学生的实践能力,并使学生能够更好地将理论知识应用到实践中。
2.3 实践操作通过实验和实际操作,让学生亲自操作各种航海仪器,熟练掌握其使用方法,并提高学生的实践技能。
三、课程设计3.1 整体设计本课程的设计以实践为主、辅以理论的教学方法,注重学生的实际操作和探究能力,以激发学生的学习兴趣,提高其学习效果和实践能力。
3.2 单元设计本课程按照航海仪器的类型进行教学,每个单元均包含以下设计:3.2.1 引入通过引入一些航海事故案例,让学生认识到航海仪器在实际航行中的重要性和使用方法。
3.2.2 理论讲解对于各种航海仪器的工作原理、使用方法和注意事项进行详细的讲解,以帮助学生掌握理论知识。
3.2.3 整机分析将各种航海仪器的组成部分和工作原理进行系统的分析,以帮助学生深入理解仪器的结构及其在航行中的应用。
3.2.4 操作实验通过实验操作,让学生亲身体验仪器的使用方法和注意事项,熟练掌握仪器的操作技巧,并发现仪器使用中的问题和解决方法。
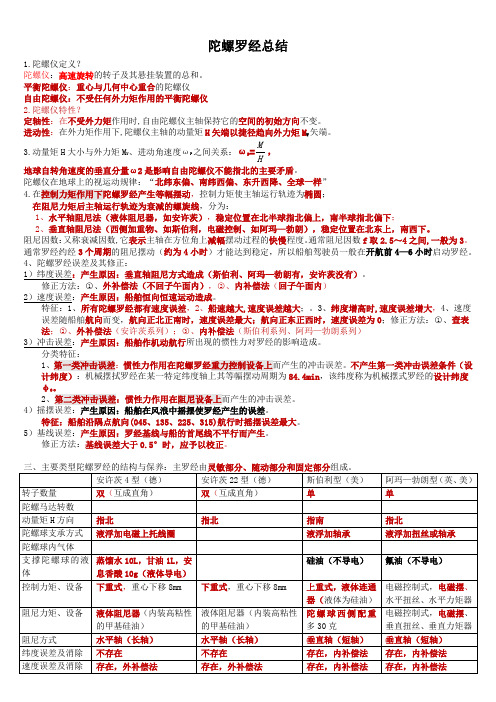
陀螺罗经总结1.陀螺仪定义?陀螺仪:高速旋转的转子及其悬挂装置的总和。
平衡陀螺仪:重心与几何中心重合的陀螺仪自由陀螺仪:不受任何外力矩作用的平衡陀螺仪 2.陀螺仪特性?定轴性:在不受外力矩作用时,自由陀螺仪主轴保持它的空间的初始方向不变。
进动性:在外力矩作用下,陀螺仪主轴的动量矩H 矢端以捷径趋向外力矩M Y 矢端。
3.动量矩H 大小与外力矩M Y 、进动角速度ωP 之间关系:ωP =, 地球自转角速度的垂直分量ω2是影响自由陀螺仪不能指北的主要矛盾。
陀螺仪在地球上的视运动规律:“北纬东偏、南纬西偏、东升西降、全球一样” 4.在控制力矩作用下陀螺罗经产生等幅摆动,控制力矩使主轴运行轨迹为椭圆; 在阻尼力矩后主轴运行轨迹为衰减的螺旋线,分为:1、水平轴阻尼法(液体阻尼器,如安许茨),稳定位置在北半球指北偏上,南半球指北偏下;2、垂直轴阻尼法(西侧加重物、如斯伯利,电磁控制、如阿玛—勃朗),稳定位置在北东上,南西下。
阻尼因数:又称衰减因数,它表示主轴在方位角上减幅摆动过程的快慢程度。
通常阻尼因数f 取2.5~4之间,一般为3。
通常罗经约经3个周期的阻尼摆动(约为4小时)才能达到稳定,所以船舶驾驶员一般在开航前4—6小时启动罗经。
4、陀螺罗经误差及其修正:1)纬度误差:产生原因:垂直轴阻尼方式造成(斯伯利、阿玛—勃朗有,安许茨没有)。
修正方法:○1、外补偿法(不回子午面内),○2、内补偿法(回子午面内) 2)速度误差:产生原因:船舶恒向恒速运动造成。
特征:1、所有陀螺罗经都有速度误差,2、船速越大,速度误差越大;。
3、纬度增高时,速度误差增大,4、速度误差随船舶航向而变,航向正北正南时,速度误差最大;航向正东正西时,速度误差为0;修正方法:○1、查表法;○2、外补偿法(安许茨系列);○3、内补偿法(斯伯利系列、阿玛—勃朗系列) 3)冲击误差:产生原因:船舶作机动航行所出现的惯性力对罗经的影响造成。

渔船航海仪器使用说明书一、前言感谢您购买渔船航海仪器,本使用说明书旨在帮助您更好地了解和使用该仪器。
请您在使用之前仔细阅读本说明书,并按照说明逐步操作。
如有任何疑问,请随时联系我们的技术支持团队。
二、仪器概述渔船航海仪器是一种用于在海洋环境下进行导航和航行的设备。
该仪器采用先进的卫星导航技术和传感器技术,能够准确测量船舶的位置、速度、航向等信息,并提供相应的导航指引。
三、使用方法1. 准备工作在使用渔船航海仪器之前,请确保以下准备工作已完成:- 确认设备已连接电源并正常开机。
- 检查仪器与船舶其他设备的连接情况,确保传感器、导航仪等设备已正确连接。
- 确保卫星信号良好,在开放的区域获取更好的信号质量。
2. 仪器配置渔船航海仪器通常包含以下几个主要部分:- 显示屏:用于显示船舶的位置、航向等信息。
- 控制面板:用于设置仪器参数、选择导航模式等。
- 导航传感器:包括GPS接收器、罗盘等,用于获取船舶的位置和航向信息。
- 声音提示器:用于提醒船员注意航行状态或警告信息。
3. 基本操作- 打开仪器电源,并等待系统启动完成。
- 在显示屏上选择导航模式,例如船舶位置显示、航向指示等。
- 根据需要设置相关参数,例如航向角度、航行速度限制等。
- 在航行过程中,密切关注仪器显示的船舶位置、航向等信息,并根据需要调整船舶航行方向。
- 若仪器发出警告声音或显示警告信息,请及时采取相应措施,以确保船舶安全。
4. 高级功能渔船航海仪器还具备一些高级功能,如船舶航线规划、航行记录等。
这些功能可以更好地辅助船员完成航行任务:- 船舶航线规划:可以在仪器上预先规划船舶航行路线,并进行保存和编辑。
- 航行记录:仪器可以记录船舶的航行轨迹、速度等信息,并提供数据下载功能。
四、注意事项- 在使用渔船航海仪器之前,请先熟悉本使用说明书,并确保已正确安装和连接设备。
- 在使用仪器期间,应保持船舶周围的良好通风,避免仪器过热或受潮。
- 请定期检查设备的电源线、传感器等连接情况,确保正常工作。
助航仪器及其它设备TG-8000电罗经操作说明一、开机1.打开罗经控制箱内的主电源开关,打开罗经操作面板上的电源开关(POWER),此时电罗经开始工作。
2.设置罗经启动时间。
3.设置罗经启动方位。
4.设置电罗经内部纬度系统。
5.调整罗经复示器与主罗经同步。
6.罗经稳定时间大约需6小时,此时禁止校正电罗经误差。
7.设置电罗经内部船速系统。
8.确认罗经系统的真方位。
9.选择罗经真方位显示模式。
二、关机1.关掉各电罗经复示器。
2.关掉主罗经操作面板上的电源开关。
3.关掉主罗经控制箱内的主电源开关,此时电罗经停止工作。
RT2048VHF操作说明一、开机1.旋转VHF操作面板上的电源及音量开关,打开电源并选择合适音量。
2.按数字键输入VHF频道。
3.调节操作面板上的SQ旋钮,进行静燥调节。
4.5.按/取消双功值守功能。
6.按二、关机旋转VHF操作面板上的电源开关,关掉电源,VHF停止工作。
KR100A航向记录仪操作说明一、开机1.向下掀开记录仪下方的盖板,将“RECORD”开关扳至“START”位置,“LIGHT”开关扳至“ON”位置,“SPEED”开关选择“NORMAL”2.向左掀开记录仪上方的盖板,按下操作面板右下角的电源开关(白色),此时记录仪开始工作并自动跟踪。
二、关机1.将上述“RECORD”开关扳至“STOP”位置,“LIGHT”开关扳至“OFF”位置。
2.按操作面板右下角的电源开关关掉电源,记录仪停止工作。

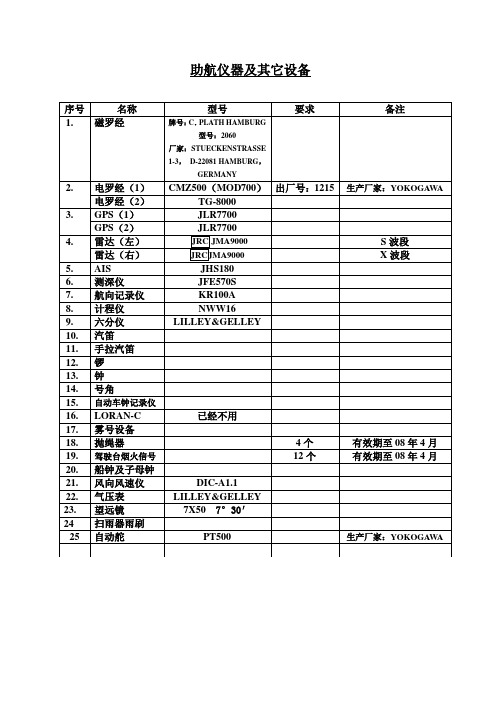
航海仪器介绍航海仪器用于确定船位和保证船舶安全航行的仪器的统称,主要是航行定位仪器。
航行定位仪器可大致分为用于天文定位(见)和无线电定位(见)等四类。
有些仪器可供几种定位方法采用。
航迹推算仪器供航迹推算用仪器。
主要有罗经,计程仪,自动操舵仪,迹记录器等。
1、罗经:确定航向和观测物标方位的仪器。
一般海船都装有陀螺罗经和磁罗经两种,前者精确方便,后者简单可靠,互相取长补短。
罗经和同为最重要的航海工具,在海图上画出航线后,船舶就依靠罗经指示航向,沿航线驶向目的地。
磁罗经是利用磁针指北的特性而制成。
指南针即是原始型式的磁罗经,是中国古代四大发明之一。
用于航海的指南针又称罗盘。
铁船出现后,磁经产生了自差。
19世纪以后,先后提出消除自差的方法,至20世纪初,性能稳定、轴针摩擦更小的液体罗经制成,曾用于大部分船舶。
磁罗经有磁差,是由于地磁极与地极不一致而产生。
存在于磁北和真北之间的夹角,即磁偏角。
海图上标注有本地磁差和年变化率,使用磁罗经时可据以修正读数。
磁罗经结构主要由罗经柜和罗经盆组成,带有磁针的罗经卡安装在盆内。
电罗经罗经又称陀螺罗经,是利用陀螺仪的定轴性和进动性,结合地球自转矢量和重力矢量,用控制设备和阻尼设备制成以提供真北基准的仪器。
陀螺罗经是由主罗经与分罗经、电源变换器、控制箱和操纵箱等附属设备构成。
2、计程仪:测量航速、累计航程的仪器。
它和罗经同为航迹推算的基本仪器,在海图上作业就是根据计程仪读数在航线上量取航行距离。
原理和性能近代计程仪主要由测速部分和指示部分组成。
测速部分用以检测和放大船舶航速信号或航程信号;指示部分用机械或电气形式显示船舶航速或航程,再通过积分或微分方法显示航程或速度。
不同类型的计程仪的工作原理和性能如下所述。
①拖曳计程仪。
利用相对于船舶航行的水流,使船尾拖带的转子作旋转运动,通过计程仪绳、联接锤、平衡轮,在指示器上显示船舶累计航程。
这种计程仪线性差,高速误差大,受风流影响大,操作不便,但性能可靠,有的船舶作为备用计程仪。
航海六分仪的原理和使用,一看就懂(图文详细版)一、六分仪是一种光学仪器,可以测量远方两个目标之间的夹角——最常用的是测量天体与海(地)平线或天体与天体之间的夹角。
测出夹角,再查得当天太阳直射点的纬度,就能确定观测者所在的纬度。
这对航海有重大意义。
自18世纪面世以来,六分仪一直是重要的定位和导航工具。
六分仪简化之后,就是这样。
包括两大部分。
第一部分,包括架体、分度弧、望远镜、半透明半反射的地平镜,都是固定住的。
这个角是60度,但分度弧的刻度是0度到120度。
另一部分,是指标臂,以及固定在指标臂上的指标镜。
地平镜与指标臂归零时的指标镜平行。
为了更简化,这里设定指标臂归零时,地平镜、指标镜、0刻度线,三者平行。
二、观测者通过望远镜和地平镜,注视着远方的海平线。
上中天的太阳,其光线射向了指标镜。
转动指标臂,让阳光反射到地平镜上。
观测者的视野里,开始出现太阳的影像。
当太阳影像与海平线相切时,指标臂的指针对准的刻度,就是太阳此时的高度角(太阳高度角就是太阳光的入射方向和地平面之间的夹角)。
这是极度简化的操作方法。
实际使用时,要有校准和调整的步骤,还要确保六分仪垂直于地面(以望远镜的光轴为轴心,让整个六分仪左右摇摆,使得视野中的太阳影像对海平线作钟摆运动时,不会下沉到海平线以下)。
并且,使用六分仪测天体高度,不是只测一次就得出结论,而是要连续多次测量。
另外,更多时候,是先对准太阳,让阳光从地平镜和望远镜中通过,再慢慢地将海平线拉入视野。
当然了,一开始不必了解这么细,先知道大概的原理就行。
有一点需要说明,人类的眼睛不是钛合金狗眼,承受不住正午阳光的直射,所以六分仪装上了可以活动的滤光片。
三、现在我们来看六分仪测量天体高度角的原理。
以下就是证明的过程(其实就是一道初中的几何证明题,非常简单):指标臂角度归零的时候,地平镜、指标镜和0刻度线,这三者是平行的。
所以∠2,其实也等于指标镜与0刻度线的夹角。
有些六分仪的地平镜,用的不是半反半透的镜片,而是由一半镜子一半玻璃拼接而成的。
1、如何检查磁罗经的灵敏度和罗盘磁性大小?(目的、方法、结论)
罗经灵敏度的检查:罗盘稳定时,准确记下船首基线所对的罗盘刻度,用一小磁铁或铁器吸引罗盘从原来平衡位置向左(或向右)偏转2°~3°,然后移去小磁铁,视罗盘是否回到原位置。
若偏差大于0.2°,则磨擦力太大,应修理.
罗盘磁性大小:罗盘稳定,用小磁铁引偏40°(左右),撤掉小磁铁,记下刻度盘0°连续两次通过基线的时间,即罗盘摆动的半周期T/2,当H=18µT时,T/2不大于18秒。
如果测得的T/2比规定值大许多,说明罗盘磁力减弱太多,应送工厂充磁.
2、试画图分析在南半球建造,船首向为NW的船舶上硬铁力P、Q、R的方向和符号。
N端位于船体上部,船首,右舷
S端位于船体下部,船尾,左舷
Q向左为负
R向下为正
3、简述罗经自差力产生自差与罗经航向的关系。
(函数关系)
λH 力只在磁子午线上出现与磁航向无关
A'λH 力只出现在垂直磁子午线中,与磁航向无关,正力指磁东,负力指磁西
B'λH 与磁子午线夹角为磁航向φ,即正的B'λH力指向船首φ,负B'λH力指向船尾(φ±180°)
C'λH 力指向与磁子午线夹角为φ±90°,即他的正力指向右舷(φ+90°),负力指向左舷(φ-90°)
D'λH 力指向与磁子午向夹角为2倍磁航向2φ,而负的D'λH力指向2φ±180°
E'λH 力指向与磁子午向夹角为2φ±90°,即正力指向2φ+90°,负力指向2φ-90°。