航海仪器B
- 格式:doc
- 大小:52.50 KB
- 文档页数:7

上 海 海 事 大 学 试 卷国家海事局三副适任证书统考《 航海仪器 》(模拟卷)参考答案<1> 何谓自由陀螺仪( )。
A .重心与其中心相重合的三自由度陀螺仪B .主轴可指向空间任意方向的陀螺仪C .不受任何外力矩作用的平衡陀螺仪D .高速旋转的三自由度陀螺仪<参考答案>c<2> 在垂直于陀螺仪主轴方向上加外力矩,陀螺仪主轴将产生进动,其进动角速度( )A .外力矩成正比,动量矩成正比B .外力矩成反比,动量矩成反比C .外力矩成正比,动量矩成反比D .外力矩成反比,动量矩成正比<参考答案>c<3> 三自由度陀螺仪在高速转动时,其主轴将指向( ),若在垂直主轴方向上加外力矩,主轴将( )。
A .空间某一方向,产生进动B .真北,指向真北C .空间某一方向,保持指向不变D .A 和C 对<参考答案>A<4> 在北纬自由陀螺仪主轴相对于午面向东做视运动,这是由于( )作用。
A 地球自转角速度B .地球自转角速度的水平分量C .地球自转角速度的垂直分量D .主轴高速旋转的角速度<参考答案>c<5> 若在赤道上,陀螺仪主轴位于子午面内,随地球自转罗经主轴指北端将( )。
A .向东偏B .向西偏C .保持在子午面内D .保持一定的高度角<参考答案>c<6> 陀螺罗经必须具有控制力矩,其作用是( )。
A .克服陀螺仪主轴在高度上的视运动B .消除纬度误差C .克服陀螺仪主轴在方位上的视运动D .消除速度误差<参考答案>c--------------------------------------------------------------------------------------装订线------------------------------------------------------------------------------------<7>机械摆式罗经等幅摆动的轨迹为一椭圆,若罗经结构参数不变,船位不变时( )。
《航海仪器》实验指导书叶进、马文耀编广东海洋大学航海学院二00七年五月目录实验一陀螺罗经的结构认识与正确使用 (1)实验二回声测深仪、船用计程仪的部件认识与正确使用 (11)实验三磁罗经的结构认识与性能检查 (16)实验四无线电导航仪的操作使用和定位 (18)实验五卫星导航仪的正确使用 (25)实验六船舶自动识别系统(AIS)认识与使用 (54)实验一陀螺罗经的结构认识与正确使用一、实验目的进一步明确各系列陀螺罗经的指北原理和航向指示方法。
掌握陀螺罗经的正确使用方法以及检查和调整的方法。
二、实验要求1.了解各种型号陀螺罗经的组成部件及各部件的作用,了解主罗经的结构和各部分作用。
2.掌握各种型号罗经的开、关机和正确使用方法;掌握各种型号罗经的日常检查和调整的方法,以及日常的保养维护。
3.学会支承液体配制。
4.熟悉陀螺罗经要做哪些性能检查和必要的调整及其方法。
三、实验设备及用具1.安许茨4型陀螺罗经1部。
2.斯伯利MK-37型陀螺罗经1部。
3.SPERRY NAVIGATOR MK-2型陀螺罗经1部4.阿玛-勃朗MK—10型陀螺罗经1部。
5.万用表,球垫(或三角架),螺丝刀,活扳手等。
6.量杯,酒精灯,玻璃棒,比重计,温度汁等。
7.少量蒸溜水、甘油、安息酸等。
四、实验内容与步骤安许茨4型陀螺罗经(Anschütz-4型)(一)结构认识1.总体结构及作用(1)主罗经:指示船舶航向。
(2)变流机或逆变器:将船电转换成罗经各部分所需要的电源(3)变压器箱或自动启动箱和报警装置:对罗经进行启动、关闭和临视其工作。
(4)分罗经接线箱及分罗经:复示主罗经航向示度。
(5)航向记录器:显示及记录船舶航向。
2.主罗经结构及作用主罗经结构由三大部分构成。
(1)灵敏部分(陀螺球):为一密封的球体,浸浮在随动球内的支承液体中。
起找北、指北的作用,是罗经的核心部件。
①陀螺球内的陀螺马达、阻尼器、灯形支架、电磁上托线圈等结构及安装方法;陀螺马达的供电及润滑方法。
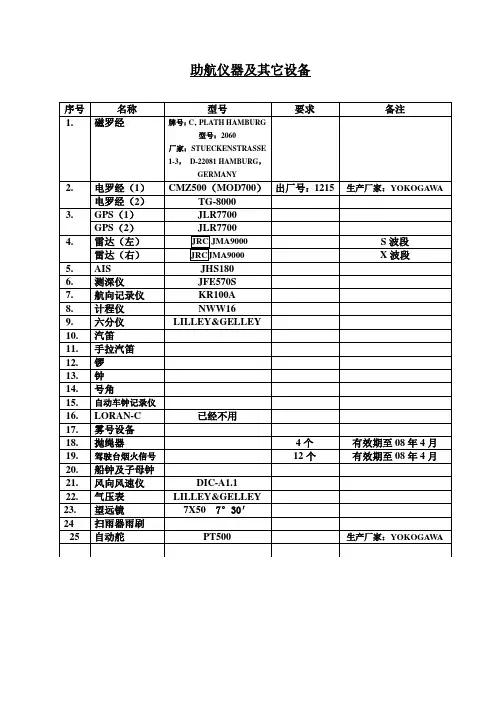
助航仪器及其它设备TG-8000电罗经操作说明一、开机1.打开罗经控制箱内的主电源开关,打开罗经操作面板上的电源开关(POWER),此时电罗经开始工作。
2.设置罗经启动时间。
3.设置罗经启动方位。
4.设置电罗经内部纬度系统。
5.调整罗经复示器与主罗经同步。
6.罗经稳定时间大约需6小时,此时禁止校正电罗经误差。
7.设置电罗经内部船速系统。
8.确认罗经系统的真方位。
9.选择罗经真方位显示模式。
二、关机1.关掉各电罗经复示器。
2.关掉主罗经操作面板上的电源开关。
3.关掉主罗经控制箱内的主电源开关,此时电罗经停止工作。
RT2048VHF操作说明一、开机1.旋转VHF操作面板上的电源及音量开关,打开电源并选择合适音量。
2.按数字键输入VHF频道。
3.调节操作面板上的SQ旋钮,进行静燥调节。
4.5.按/取消双功值守功能。
6.按二、关机旋转VHF操作面板上的电源开关,关掉电源,VHF停止工作。
KR100A航向记录仪操作说明一、开机1.向下掀开记录仪下方的盖板,将“RECORD”开关扳至“START”位置,“LIGHT”开关扳至“ON”位置,“SPEED”开关选择“NORMAL”2.向左掀开记录仪上方的盖板,按下操作面板右下角的电源开关(白色),此时记录仪开始工作并自动跟踪。
二、关机1.将上述“RECORD”开关扳至“STOP”位置,“LIGHT”开关扳至“OFF”位置。
2.按操作面板右下角的电源开关关掉电源,记录仪停止工作。
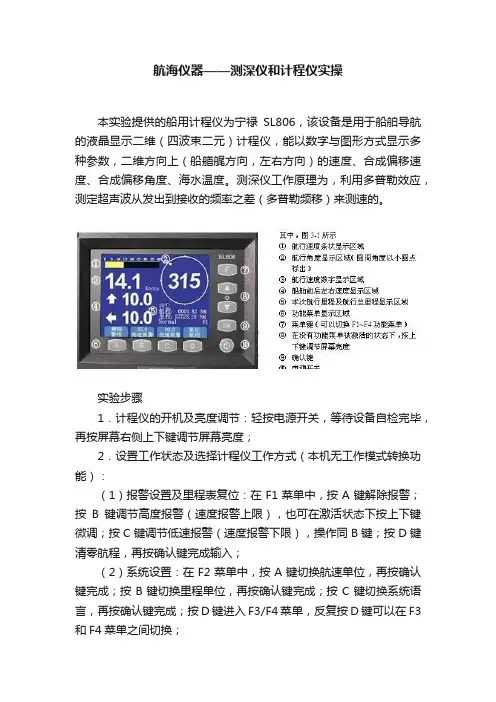
航海仪器——测深仪和计程仪实操本实验提供的船用计程仪为宁禄SL806,该设备是用于船舶导航的液晶显示二维(四波束二元)计程仪,能以数字与图形方式显示多种参数,二维方向上(船艏艉方向,左右方向)的速度、合成偏移速度、合成偏移角度、海水温度。
测深仪工作原理为,利用多普勒效应,测定超声波从发出到接收的频率之差(多普勒频移)来测速的。
实验步骤1.计程仪的开机及亮度调节:轻按电源开关,等待设备自检完毕,再按屏幕右侧上下键调节屏幕亮度;2.设置工作状态及选择计程仪工作方式(本机无工作模式转换功能):(1)报警设置及里程表复位:在F1菜单中,按A键解除报警;按B键调节高度报警(速度报警上限),也可在激活状态下按上下键微调;按C键调节低速报警(速度报警下限),操作同B键;按D键清零航程,再按确认键完成输入;(2)系统设置:在F2菜单中,按A键切换航速单位,再按确认键完成;按B键切换里程单位,再按确认键完成;按C键切换系统语言,再按确认键完成;按D键进入F3/F4菜单,反复按D键可以在F3和F4菜单之间切换;(3)自动校准设置:在F3菜单中,首先要获得一条已知航线的距离数据、GPS高精度测距数据、计程仪高精度测距数据,再对这条航线正程和逆程进行校准,如果有GPS信号接入,则不需要手动输入,具体操作同上;(4)手动校准设置:在F4菜单中,可选择本机F3菜单中存储的三组校准数据,分别按功能键能够手动调节偏移角度、偏移速度和真实速度;3.读取航速和航程数据:在主机显示界面读取相关信息。
本实验提供的回声测深仪为宁禄DS207,该设备拥有高灵敏度接收器并配有先进的探测软件,能实时、精确、稳定地测量并显示水底地形、水底深度、物体形状。
其工作原理为声波在水下往返750米正好是1秒钟,测量声波的往返时间,可以计算水下目标深度。
实验步骤1.测深仪的开机及亮度调节:轻按电源开关,等待设备自检完毕,再按“亮度”和“昼夜”调节按钮调节;2.选择侧深工作模式和显示方式:按“自动”按钮,选择自动或者手动模式,手动模式下根据海图水深,再按“量程”按钮,选择合适量程;3.调整回波信号:旋动“增益”旋钮,抑制杂波使回波清晰,再根据海底底质等情况,按“色标”按钮,使回波轮廓清晰;4.读取深度数据:画面左上角数字显示稳定时可以直接读取,如果数据显示闪烁,则读取第一道回波最上沿对应的量程读数,精度精确到0.1米;5.设置报警功能:按“报警”上下调节最小富裕水深报警。
广东海洋大学2006 —— 2007学年第一学期 《 航海仪器 》课程试题 课程号: 1810026 √ 考试 □ A 卷 √ 闭卷 □ 考查 √ B 卷 □ 开卷一、选择题(每题1分,共60分) 1。
在北纬自由陀螺仪主轴相对于午面向东做视运动,这是由于_____作用。
A .地球自转角速度 B .地球自转角速度的水平分量 C .地球自转角速度的垂直分量 D .主轴高速旋转的角速度 2.从工程技术角度,陀螺仪的定义为_____。
A .高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 B .转子及其悬挂装置的总称 C .具有三自由度的转子 D .高速旋转的对称刚体 3.下列罗经中,_____罗经采用长轴阻尼法;_____罗经采用短轴阻尼法。
A .阿玛一勃朗系列;安许茨系列 B .斯伯利系列;阿玛一勃朗系列 C .阿玛一勃朗系列;斯伯利系列 D .安许茨系列;斯伯利系列和阿玛一勃朗系列 4.舒拉条件是指当陀螺罗经的等幅摆动周期为_____,陀螺罗经不存在第一类冲击误差 A .6小时 B .90分钟 C .84。
4分钟 D .60分钟 5。
启动斯伯利罗径后,如果主轴(OX 正向)偏高欲使其水平,则应在主轴的什么方向施加外力 A .上方 B .左方 C .右方 D .下方 6.陀螺罗经在高纬度区使用时,其指向精度下降是由于_____变小的缘故 A .动量矩 B .控制力矩 C .阻尼力矩 D .指向力矩 7.当船舶变速变向运动时,陀螺罗经受到惯性力矩的作用,使主轴偏离_____形成的误差叫 _____.A .真北,速度误差B .真北,摇摆误差C .稳定位置,冲击误差D .稳定位置,纬度误差8.下列有关陀螺罗经误差的说法中,_____是错误的。
A .采用垂直轴阻尼法的陀螺罗经产生纬度误差B .速度误差与船舶所在地的纬度无关班级:姓名: 学号:试题共页加白纸张密封线GDOU-B-11-302C.采用外补偿法消除速度误差时,陀螺罗经主轴的原稳定位置不变D.第一类冲击误差在船舶机动终了后约1h即可消失9.因安许茨系列罗经采用了_____,则罗经不产生纬度误差。
1. 航海中使用的六分仪主要用于测量什么?A. 风速B. 方位角C. 天体高度D. 水深2. GPS导航系统属于哪一类导航系统?A. 天文导航B. 无线电导航C. 惯性导航D. 卫星导航3. 航海图上的等高线表示什么?A. 水深B. 陆地高度C. 风速D. 温度4. 航海中,什么是“真北”?A. 地球磁极的方向B. 地球自转轴的北极方向C. 地图上的北方D. 船头的方向5. 航海中,什么是“磁北”?A. 地球磁极的方向B. 地球自转轴的北极方向C. 地图上的北方D. 船头的方向6. 航海中,什么是“罗经北”?A. 地球磁极的方向B. 地球自转轴的北极方向C. 地图上的北方D. 船头的方向7. 航海中,什么是“航向”?A. 船的行驶速度B. 船的行驶方向C. 船的停泊位置D. 船的载重量8. 航海中,什么是“航速”?A. 船的行驶速度B. 船的行驶方向C. 船的停泊位置D. 船的载重量9. 航海中,什么是“航迹”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 船的载重量10. 航海中,什么是“航程”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶距离D. 船的载重量11. 航海中,什么是“航标”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的标志物12. 航海中,什么是“航海日志”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶记录D. 船的载重量13. 航海中,什么是“航海图”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的地图14. 航海中,什么是“航海钟”?A. 船的行驶速度B. 船的行驶方向C. 船的时间记录D. 船的载重量15. 航海中,什么是“航海灯”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的灯光16. 航海中,什么是“航海雷达”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的雷达17. 航海中,什么是“航海气象”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的气象信息18. 航海中,什么是“航海通信”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的通信19. 航海中,什么是“航海安全”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的安全20. 航海中,什么是“航海规则”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的规则21. 航海中,什么是“航海法规”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的法规22. 航海中,什么是“航海技术”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的技术23. 航海中,什么是“航海设备”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的设备24. 航海中,什么是“航海仪器”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的仪器25. 航海中,什么是“航海工具”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的工具26. 航海中,什么是“航海知识”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的知识27. 航海中,什么是“航海经验”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的经验28. 航海中,什么是“航海训练”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的训练29. 航海中,什么是“航海教育”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的教育30. 航海中,什么是“航海文化”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的文化31. 航海中,什么是“航海历史”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的历史32. 航海中,什么是“航海地理”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的地理33. 航海中,什么是“航海天文”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的天文34. 航海中,什么是“航海气象学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的气象学35. 航海中,什么是“航海海洋学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的海洋学36. 航海中,什么是“航海生物学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的生物学37. 航海中,什么是“航海化学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的化学38. 航海中,什么是“航海物理学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的物理学39. 航海中,什么是“航海数学”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的数学40. 航海中,什么是“航海工程”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的工程41. 航海中,什么是“航海机械”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的机械42. 航海中,什么是“航海电子”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的电子43. 航海中,什么是“航海电气”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的电气44. 航海中,什么是“航海自动化”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的自动化45. 航海中,什么是“航海计算机”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的计算机46. 航海中,什么是“航海软件”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的软件47. 航海中,什么是“航海网络”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的网络48. 航海中,什么是“航海信息”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的信息49. 航海中,什么是“航海数据”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的数据50. 航海中,什么是“航海信号”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的信号51. 航海中,什么是“航海控制”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的控制52. 航海中,什么是“航海管理”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的管理53. 航海中,什么是“航海组织”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的组织54. 航海中,什么是“航海协调”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的协调55. 航海中,什么是“航海合作”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的合作56. 航海中,什么是“航海交流”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的交流57. 航海中,什么是“航海沟通”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的沟通58. 航海中,什么是“航海协商”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的协商59. 航海中,什么是“航海谈判”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的谈判60. 航海中,什么是“航海协议”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的协议61. 航海中,什么是“航海条约”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的条约62. 航海中,什么是“航海法律”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的法律63. 航海中,什么是“航海政策”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的政策64. 航海中,什么是“航海战略”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的战略65. 航海中,什么是“航海战术”?A. 船的行驶速度B. 船的行驶方向C. 船的行驶路径D. 用于导航的战术答案:1. C2. D3. A4. B5. A6. D7. B8. A9. C10. C11. D12. C13. D14. C15. D16. D17. D18. D19. D20. D21. D22. D23. D24. D25. D26. D27. D28. D29. D30. D31. D32. D33. D34. D35. D36. D37. D38. D39. D40. D41. D42. D43. D44. D45. D46. D47. D48. D49. D50. D51. D52. D53. D54. D55. D56. D57. D58. D59. D60. D61. D62. D63. D64. D65. D。
中职航海概论考试题及答案一、选择题(每题2分,共20分)1. 航海学是一门研究什么的科学?A. 海洋生物B. 海上航行技术与方法C. 海洋气象D. 海洋地理答案:B2. 世界上最早的航海家是谁?A. 郑和B. 哥伦布C. 达·伽马D. 马可·波罗答案:A3. 以下哪个不是航海仪器?A. 罗盘B. 六分仪C. 望远镜D. 水准仪答案:D4. 航海中所说的“纬度”是指什么?A. 地球表面上与赤道平行的圆周线B. 地球表面上与赤道垂直的圆周线C. 地球表面上与经线平行的圆周线D. 地球表面上与经线垂直的圆周线答案:A5. 航海中“正午太阳高度”是指什么?A. 太阳在天空中的高度角B. 太阳在地平线上的高度C. 太阳在天顶的高度D. 太阳在海平面的高度答案:C6. 航海中“航向”是指什么?A. 船只前进的方向B. 船只的航速C. 船只的吃水深度D. 船只的航行时间答案:A7. 航海中“航迹”是指什么?A. 船只实际走过的路线B. 船只计划要走的路线C. 船只的航速记录D. 船只的航行日志答案:A8. 航海中“锚地”是指什么?A. 船只停泊的地方B. 船只航行的起点C. 船只航行的终点D. 船只进行货物装卸的地方答案:A9. 航海中“海图”的作用是什么?A. 记录船只的航行日志B. 显示海洋的深度和海底地形C. 指导船只的航行方向D. 记录船只的货物清单答案:B10. 航海中“航速”是指什么?A. 船只每小时行驶的距离B. 船只每天行驶的距离C. 船只每秒行驶的距离D. 船只每分钟行驶的距离答案:A二、填空题(每空2分,共20分)11. 航海学中,________是用来确定船只位置的一种方法。
答案:定位12. 航海中,船只的“吃水”是指船底到________的距离。
答案:水面13. 航海中,船只的“排水量”是指船只________的重量。
答案:满载时排开水14. 航海中,船只的“稳性”是指船只在________后能够恢复到原状的能力。
【科普】航海仪器和导航系统小知识航海仪器众所周知,早期航海主要依靠磁罗经、六分仪和天文钟三件古老的航海仪器。
随着航海事业的迅速发展,船舶数量的增加,吨位的增大,海上交通日益拥挤和繁忙,便要求航海仪器能够快捷地提供更加准确的方位指示、更加精确的定位精度和多种用途的导航数据。
于是相继出现了雷达与ARPA,陀螺罗经,回声测深仪,计程仪,无线电测向系统,罗兰A和罗兰C导航系统,台卡导航系统,奥米伽导航系统和卫星导航系统等。
这些航海仪器和导航系统为船舶提供了全天候的航海保证。
可以说,航海事业的发展,刺激了航海仪器的发展。
反过来,航海仪器的发展又促进了航海技术的发展和提高。
随着计算机技术的发展和在航海上的日益广泛应用,装备自动控制、自动避让、自动驾驶等系统的智能化船舶已越来越多的投入使用,未来船舶的高科技含量必将会越来越高。
1航海陀螺罗经陀螺罗经是根据高速旋转的陀螺转子指向性原理制成的。
它是一种不受磁场影响、有较强指北力的电动机械仪器。
一台主罗经可以带动许多台分罗经,可以在驾驶室内外、船长房间、海图室等处设置分罗经,是船舶航行、观测物标方位的重要仪器。
2船用回声探测仪回声测深仪是一种测量水深的船用水声导航仪器,在船舶航行中,水深对航线拟定和保证船舶的安全航行起着重要的作用。
回声测深仪的用途有:在特殊情况下,可通过测量水深来辨认船位;在开辟新航区或浅水航区航行时,可用于导航,以确保船舶航行安全;在航道及港口测量方面,它可提供准确可靠的水深资料。
因此,回声测深仪是船舶必不可少的导航设备。
回声测深仪是应用声波在水中传播的物理特性而制成的。
众所周知,在海水介质中,声波的传播性能是电磁波和光波所无法取代的。
利用声波在水中传播速度基本恒定这一原理,采用测量声波自发射经海底反射至接收的时间间隔,便可计算得到水深。
早在1490年,意大利人达·芬奇即提出用听音法探测远方船只的可能性,但直至1925年回声测深仪才问世,历时450年。
航海仪器介绍航海仪器用于确定船位和保证船舶安全航行的仪器的统称,主要是航行定位仪器。
航行定位仪器可大致分为用于天文定位(见)和无线电定位(见)等四类。
有些仪器可供几种定位方法采用。
航迹推算仪器供航迹推算用仪器。
主要有罗经,计程仪,自动操舵仪,迹记录器等。
1、罗经:确定航向和观测物标方位的仪器。
一般海船都装有陀螺罗经和磁罗经两种,前者精确方便,后者简单可靠,互相取长补短。
罗经和同为最重要的航海工具,在海图上画出航线后,船舶就依靠罗经指示航向,沿航线驶向目的地。
磁罗经是利用磁针指北的特性而制成。
指南针即是原始型式的磁罗经,是中国古代四大发明之一。
用于航海的指南针又称罗盘。
铁船出现后,磁经产生了自差。
19世纪以后,先后提出消除自差的方法,至20世纪初,性能稳定、轴针摩擦更小的液体罗经制成,曾用于大部分船舶。
磁罗经有磁差,是由于地磁极与地极不一致而产生。
存在于磁北和真北之间的夹角,即磁偏角。
海图上标注有本地磁差和年变化率,使用磁罗经时可据以修正读数。
磁罗经结构主要由罗经柜和罗经盆组成,带有磁针的罗经卡安装在盆内。
电罗经罗经又称陀螺罗经,是利用陀螺仪的定轴性和进动性,结合地球自转矢量和重力矢量,用控制设备和阻尼设备制成以提供真北基准的仪器。
陀螺罗经是由主罗经与分罗经、电源变换器、控制箱和操纵箱等附属设备构成。
2、计程仪:测量航速、累计航程的仪器。
它和罗经同为航迹推算的基本仪器,在海图上作业就是根据计程仪读数在航线上量取航行距离。
原理和性能近代计程仪主要由测速部分和指示部分组成。
测速部分用以检测和放大船舶航速信号或航程信号;指示部分用机械或电气形式显示船舶航速或航程,再通过积分或微分方法显示航程或速度。
不同类型的计程仪的工作原理和性能如下所述。
①拖曳计程仪。
利用相对于船舶航行的水流,使船尾拖带的转子作旋转运动,通过计程仪绳、联接锤、平衡轮,在指示器上显示船舶累计航程。
这种计程仪线性差,高速误差大,受风流影响大,操作不便,但性能可靠,有的船舶作为备用计程仪。

一.磁罗经1.读取航向(误差允许±2)2.指出磁罗经主要部件的位置及作用。
罗经框:(非磁性材料)支撑罗盘;安装校正器。
罗经盘:指示航向。
垂直磁棒:校正倾斜自差。
水平(横向;纵向)磁棒:校正半圆自差。
半圆自差校正口诀:①放置磁棒的口诀:东红东;西红西—东差时使用红端向东的磁棒校正;西差的时候使用红端向西的磁棒。
②移动磁棒的口诀:东东上,西西上;东西下,西东下—如东自差,放置的磁棒红端也朝向东则应向上移动…其它类似。
PS:当船为东西航向时调整纵向磁棒;当船为南北航向时调整横向磁棒。
半圆自差校正分四次(4个基点)东北全校正;南西只校正一半。
软铁片:校正象限自差PS:一三象限,东近西远。
二四象限,东远西近。
航向为一三象限则东差将软铁靠近,西差则将软铁远离。
二四象限则与之相反。
正正靠,正负离;负负靠,负正离。
PS:此时每组第一个字表示磁航向,一三象限为正,二四象限为负;第二个字表示所测的自差的正负;第三个字表示移动软铁的方向。
软铁校正分两步,第一步全校正,第二部校正一半。
液体酒精的作用是降低冰点。
3.对磁罗经的检查(灵敏度)灵敏度的检查:检查罗盘轴针与轴冒间的磨损情况(摩擦力)方法:记下基线所指的航向,然后用一小磁铁或铁器将罗盘从原来的地方向左引偏2°~3°,移开小磁铁,观测罗盘是否返回原航向。
(相位自差0.2°以内)4.对磁罗经办周期的检查。
用小磁铁将罗盘引偏40°,移开小磁铁,用秒表测量罗盘上的0°连续两次过船首基线的时间,即为罗盘摆动半周期。
实测半周期小于标准半周期。
(12秒±0.5)5.磁罗经气泡消除。
PS:气泡不影响自差,影响观察注液孔:向罗盘注入液体的孔液体成分:45%的酒精,55%的蒸馏水。
将罗经盘的注液孔朝上,旋出螺盖,将配好的液体注入罗盘内至气泡消失为止。
6.叙述磁罗经校正器的保存要求。
磁棒的保存:异名端相靠,避免高温,避免振动,避免恒定磁场影响。
航海仪器操作说明摘要:本文档旨在为使用航海仪器的用户提供详细的操作说明。
航海仪器是一类用于帮助航海者确定自身位置、航向和测量水深的专业工具。
了解如何正确操作这些仪器对于保障船舶的安全航行必不可少。
1. 引言航海仪器是航海员的重要工具之一,它能够帮助船舶在海洋中准确导航以及探测水下情况。
本文档将详细介绍以下几种常见的航海仪器及其操作方法:1.1 罗盘和陀螺罗盘1.2 海图和电子海图1.3 水深仪1.4 存储器导向系统1.5 全球定位系统(GPS)2. 罗盘和陀螺罗盘罗盘是一种常见的航海仪器,用于确定船舶的方向。
使用罗盘时,需注意以下几点:2.1 放置位置:罗盘应放置在船舶上不受干扰的位置,远离磁场干扰或金属物体。
2.2 标定:在使用罗盘之前,需要进行罗盘的标定。
将罗盘指向北方并进行相应的校准,确保其准确性。
2.3 读取示数:罗盘上通常有刻度,读取罗盘指向的方向。
同时,要考虑罗盘指针的偏差,使用修正表进行修正。
陀螺罗盘是一种更高精度的航海仪器,使用方法类似罗盘,但更为精确和稳定。
3. 海图和电子海图海图是航海中必不可少的工具,它提供了海洋地理信息,包括水深、测距标志和航行标志等。
使用海图时需注意以下事项:3.1 选择适当的海图:根据航行区域选择适当的海图。
注意海图的比例尺和更新情况。
3.2 读取海图:掌握海图上的符号和标志含义,了解如何确定自身位置和航向。
3.3 记录信息:在航行过程中,记录重要的航标、水深和领航标志物,以备参考。
电子海图是海图的数字形式,更加方便实用。
使用电子海图时,需确保电子设备的合理安装和正常运行。
4. 水深仪水深仪可用于测量水下的水深情况。
正确使用水深仪时,需注意以下几点:4.1 安装位置:水深仪应放置在船舶底部,以测量尽可能准确的水深。
4.2 校准:在使用水深仪之前,进行相应的校准。
确保水深仪的准确性,并根据不同的深度进行修正。
4.3 利用其他导航工具进行验证:使用其他航海仪器来验证水深仪的准确性。
陀 螺 题1.一般应在开航前 启动安许茨罗经,只有在前次关闭罗经,船舶靠在码头一直未改航向时方可在开航前 启动罗经。
A、4-5h,2-3h B、2-3h,0.5-1h C、8-10h,5-6h D、0.5-1h,20-30min 2.控制力矩采用液体连通器产生的是哪种型号的罗经,其罗经动量矩的方向指:A、安许茨,南B、斯伯利,北C、安许茨,北D、斯伯利,南3.为使液体连通器罗经自动找北,其阻力重物必须放在陀螺房 侧A、西B、东C、南D、北5.陀螺罗经的主轴指北端自启动到稳定指向所需的时间与 有关。
A、航向B、航速C、纬度D、经度6.电控罗经的控制力矩和阻尼力矩是由 产生的。
A、倾斜随动系统B、方位随动系统C、电磁摆D、A+B7.电控罗经是用 敏感(测量)主轴偏离水平面角度的。
A、阻尼器B、硅油C、电磁摆D、信号电桥9.位于南纬的自由陀螺仪,其主轴的视运动规律是 。
A、偏西,东升西降B、偏东,东升西降C、偏东,西升东降D、偏西,西升东降ω的影响,使自由陀螺仪主轴视运动的方位变律是:10.由于地球自转角速度的垂直分量2A、北纬东偏,南纬西偏B、北纬西偏,南纬东偏C、偏东则上升,偏西则下降D、偏西则上升,偏东则下降 11.陀螺罗经启动后其主轴的运动规迹是 。
A、等幅摆线B、收敛螺旋线C、指灵敏衰减曲线D、B、C均对12.安许茨4型罗经,在纬度20°处启动时到稳定指北需3小时。
若启动状态不变,在纬度50°处达到稳定指北的时间 。
A、大于3小时B、小于3小时C、仍为3小时D、不定13.安许茨系列罗经的动量矩H矢端是 。
A、指北B、指南C、指东D、指西15.为了减小冲击误差,当船在低于设计纬度的海区机动航行时,应 。
A、关闭阻尼器B、不关闭阻尼器C、接通冷却开关D、断开随动开关16.影响自由陀螺仪主轴不能稳定指北的主要因素是地球自转角速度的 。
A、垂直分量B、水平分量C、在陀螺仪主轴上的分量D、在陀螺仪水平轴上的分量 17.自由陀螺仪的进动性是在 作用下改变主轴的 指向。
广东海洋大学2006 —— 2007学年第一学期 《 航海仪器 》课程试题 课程号: 1810026 √ 考试 □ A 卷 √ 闭卷 □ 考查 √ B 卷 □ 开卷一、选择题(每题1分,共60分) 1.在北纬自由陀螺仪主轴相对于午面向东做视运动,这是由于_____作用。
A .地球自转角速度 B .地球自转角速度的水平分量 C .地球自转角速度的垂直分量 D .主轴高速旋转的角速度 2.从工程技术角度,陀螺仪的定义为_____。
A .高速旋转的对称转子及保证转子主轴指向空间任意方向的悬挂装置 B .转子及其悬挂装置的总称 C .具有三自由度的转子 D .高速旋转的对称刚体 3.下列罗经中,_____罗经采用长轴阻尼法;_____罗经采用短轴阻尼法。
A .阿玛一勃朗系列;安许茨系列 B .斯伯利系列;阿玛一勃朗系列 C .阿玛一勃朗系列;斯伯利系列 D .安许茨系列;斯伯利系列和阿玛一勃朗系列 4.舒拉条件是指当陀螺罗经的等幅摆动周期为_____,陀螺罗经不存在第一类冲击误差 A .6小时 B .90分钟 C .84.4分钟 D .60分钟 5.启动斯伯利罗径后,如果主轴(OX 正向)偏高欲使其水平,则应在主轴的什么方向施加外力 A .上方 B .左方 C .右方 D .下方6.陀螺罗经在高纬度区使用时,其指向精度下降是由于_____变小的缘故A .动量矩B .控制力矩C .阻尼力矩D .指向力矩7.当船舶变速变向运动时,陀螺罗经受到惯性力矩的作用,使主轴偏离_____形成班级:姓名: 学号:试题共页加白纸张密封线GDOU-B-11-302的误差叫_____。
A.真北,速度误差B.真北,摇摆误差C.稳定位置,冲击误差 D.稳定位置,纬度误差8.下列有关陀螺罗经误差的说法中,_____是错误的。
A.采用垂直轴阻尼法的陀螺罗经产生纬度误差B.速度误差与船舶所在地的纬度无关C.采用外补偿法消除速度误差时,陀螺罗经主轴的原稳定位置不变D.第一类冲击误差在船舶机动终了后约1h即可消失9. 因安许茨系列罗经采用了_____,则罗经不产生纬度误差。
A.陀螺球重心下移 B.双转子C.液浮支承 D.水平轴阻尼法10. 陀螺罗经第一类冲击误差是指____而产生的误差。
A.惯性力矩作用在罗经重力控制设备上B.惯性力矩作用在罗经阻尼设备上C.惯性力矩作用在罗经几何中心上D.罗经在船舶摇摆时。
11. 为什么安许茨系列罗经的陀螺球要采用双转子结构____。
A.纬度误差 B.第一类冲击误差 C.摇摆误差 D.速度误差12. 在起动阿玛-勃朗10型罗经时,操作“方位”、“倾斜”和“旋转速率”控钮的作用是____。
A.消除速度、纬度误差B.消除摇摆误差C.使罗经工作在方位陀螺仪状态D.减少陀螺罗经的稳定时间13.下列____原因可能引起安许茨4型陀螺罗经的蜂鸣器一直报警。
A.微动开关接触不良 B.环境温度太高C.环境温度太低 D.A+B+C14.在存放、清洁和拿取安许茨4型罗经陀螺球时,为不使润滑油溅到陀螺马达上,陀螺球倾斜应小于____。
A.30度 B.45度 C.60度 D.90度15.检查安许茨4型罗经的随动速度,是测量随动部分以最大速度使航向转过90度所需的时间,应不超过____。
A.1分钟 B.30秒 C.20秒 D.50秒16.在船舶恒向恒速运动时,陀螺罗经将产生____。
A.速度误差 B.摇摆误差 C.冲击误差 D.纬度误差17.陀螺罗经的速度误差随船航向变化,在____航向上速度误差最大。
A.045度和225度 B.090度和270度C.000度和180度 D.135度和315度18.安许茨4型陀螺罗经正常工作时.陀螺球的三相电流值应在____范围内。
A.0.6~1.1A B.0.9~1.6A C.1.6~2.5A D.2.0~3.0A19.斯伯利MK37型罗经设备主要由一_____组成。
A.主罗经和分罗经 B.电子控制器C.速纬误差补偿器和航向发送器 D.A+B+C20.斯伯利MK37型罗经用以产生和传递随动信号的元件是____。
A.信号电桥 B.8字型线圈和电磁铁C.E型变压器和衔铁 D.电磁摆21.当船舶航行纬度不在设计纬度时,陀螺罗经的冲击误差将____。
A.增大 B.变小 C.不变 D.大小根据罗经结构而定22.检查双转子陀螺罗经的陀螺球时,发现陀螺球高度偏低,则应____。
A.加适量蒸馏水,调整支承液体的比重B.加适量甘油,调整支承液体的比重C.加适量安息酸或硼砂,增加支承液体的导电性能D.用比重计证实支承液体比重不对,加甘油调整比重23.斯伯利37型陀螺罗经的正常起动步骤是:接通电源开关后,将转换开关按序置于____、____、____和____位置。
A.旋转,起动,校平,运转 B.起动,旋转,校平,运转C.旋转,起动,运转,校平 D.起动,校平,旋转,运转24._____ 样的海底底质对超声波反射能力最差。
A.淤泥 B.岩石 C.碎 D.沙25.回声测深仪的测量深度与_____因素无关。
A.发射触发重复周期 B.触发脉冲宽度C 发射功率 D.发射触发方式26.测深仪换能器的工作面不能涂油漆,是因为油漆_____,会影响测深仪正常工作。
A.腐蚀换能器的测深工作面B.对换能器工作面起隔离作用C 使换能器工作面及其周围形成汽泡D.对声能的吸收很大27.测深仪换能器的安装位置,一般应选择在____。
A.靠近机舱处 B.船中向后(1/2~1/3)船长处C.距船首(1/2~1/3)船长处 D.靠近船首处28.下述有关回声测深仪的说法中,____是不正确的。
A.测深仪的最小测量深度取决于发射脉冲宽度B.风浪大,船舶摇摆剧烈时将无法进行测深C.浅水测深时,应以回波信号带的后沿读出水深D.船舶长期停泊,应每隔半个月对测深仪通电一次29.回声测深仪测量的最大深度所对应的超声波往返时间t与发射脉冲重复周期T有下面的关系时才能正确显示深度——。
A.t<T B.t≥T C.t>2T D.t=4T30.回声测深仪的最小测量深度取决于____。
A.脉冲周期 B.发射频率C.声波传播速度 D.发射脉冲宽度31.测深仪记录显示方式,为提高读数精度,采用象限制。
选择象限时,若不了解船所在位置的水深时,则应____。
A.从最小的象限开始,依次改变象限,直到记录纸上出现深度标志为止B.从最大的象限开始依次改变象限,直到合适为止C.从中等象限开始,远近象限交替,直到合适为止D.任意选择象限32.在航道水深不明时使用测深仪,正确选择量程的方法是____,直至合适。
A.先选最大量程,再逐渐变小 B.先选最小量程,再逐渐变大C.先选中档量程,再远近交替 D.中档以下量程任选33.在多普勒计程仪中,不使超声波发射方向与航速方向相垂直(即发射波束俯角≠90度)的原因是____。
A.减少纵向摇摆误差 B.减少上下颠簸误差C.便于接收反射回波 D.垂直时不产生多普勒效应34.多普勒计程仪采用双波速是为了____。
A.能够测定船舶前进和后退速度B.消除由于声速变化所引起的测速误差C.消除船舶摇摆或颠簸而引起的测速误差D.A+B+C35.能够避免声速变化而引起测量误差的水声导航仪器是____。
A.多普勒计程仪 B.声相关计程仪C.回声测深仪 D.A、B、C均是36.在磁罗经罗经柜内水平横向放置的磁棒为____校正器,用于校正 A.硬铁,纵向硬铁船磁力 B.硬铁,横向硬铁船磁力C.软铁,纵向硬铁船磁力 D.软铁,横向硬铁船磁力37.校正完磁罗经自差后,为制作罗经自差表,需要观测____航向上的剩余自差。
A.四个基点 B.四个偶点C.四个基点和四个偶点 D.每隔15度38.已知过叠标时用磁罗经测得该叠标的罗方位为287度,从海图上量得该叠标的真方位为293度,Var=-1度,则该罗经的自差为____。
A.+5度 B.+6度 C.-6度 D.+7度39.利用观测太阳方位求磁罗经自差时,太阳的高度最好低于____。
A.30度 B.45度 C.60度 D.90度40.船舶在风浪中航行而左右摇摆,磁罗经罗盘也随之左右摆动,这是由于没有准确消除____引起的。
A.硬铁半圆自差 B.象限自差C.倾斜自差 D.软铁半圆自差41.你船正在校正自差,此时应挂____旗。
A.H B.B C.OQ D.TE42.在利用迭标方位测定罗经自差时,为提高观测方位的准确性,一般船与近标的距离控制在____前后标的距离范围内。
A.3~5倍 B.1~2倍 C.10~15倍 D.10倍以上43.要了解无线电信标的工作情况,应查阅____资料。
A.航路指南 B.进港指南C.无线电信号表第二卷 D.无线电测向仪使用说明书44.当电波来向与环状天线平面____时,其感应电势为____,无线电测向仪监听到的信号声音最小或监听不到信号的声音。
A.垂直,最大 B.垂直,最小或零C.平行,最小或零 D.斜交,最大45.在无线电测向过程中,在两个相反的方向中,确定哪一边的过程称为____。
A.哑点 B.导航 C.定边 D.双值性46.无线电测向仪中,垂直天线的作用是____。
A.定边 B.天线效应补偿C.定边和天线效应补偿 D.增加信号强度47.当船岸之间的距离____波长时,无线电测向仪的海岸效应可忽略。
A.大于10倍 B.小于10倍 C 大于5倍 D.小于5倍48.利用GPS卫星导航仪定位,在地平线7.50以上,至少可以看见____颗卫星。
A.3 B.4 C.5 D.649. GPS卫星导航系统使用____坐标系。
A.TOKIYO 1841 B.OSGBl936 C.WGS84 D.WG572 50. GPS卫星导航仪定位误差的大小与下列____因素有关。
A.卫星几何图形 B.测距误差的大小C.操作者的熟练程度 D.卫星几何图形与测距误差的大小51. GPS卫星导航系统分为距离型、多普勒型和距离多普勒混合型系指按____分类。
A.工作方式 B.工作原理C.测量的导航定位参量 D.用户获得的导航定位数据52.卫星测距定位意指确定船位的方法是测量____。
A.用户到卫星的距离 B.用户到卫星的距离差C.用户到卫星的距离和 D.A+B+C53. GPS卫星导航仪测得的距离不是用户到卫星的真正距离,其中包括____。
A.卫星时钟偏差B.信号传播误差(电离层折射误差,对流层折射误差)C.用户时钟偏差D.A+B+C54. GPS卫星导航系统发射的L1信号的频率由____码调制。
A.P B.Y和P C.CA D.CA和P55.商船上用的最多的GPS卫星导航仪是____GPS卫星导航仪。
A.单通道、单频、CA码、时序型B.双通道、单频、CA码、时序型C.单通道、单频、CA码、多路复用型D.多通道、双频、CA码和P码、连续型56.用GPS卫星导航仪定位时,若提供的历书的时间很久或定位误差明显偏大则应该____。