自动化仿真PDPS
- 格式:ppt
- 大小:8.53 MB
- 文档页数:229
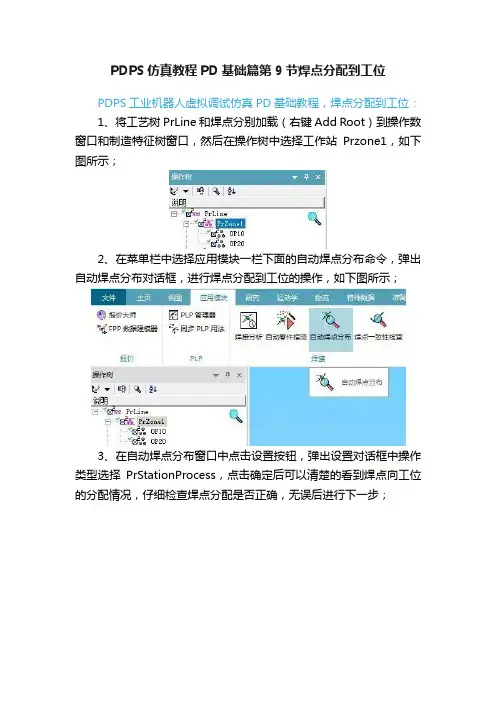
PDPS仿真教程PD基础篇第9节焊点分配到工位
PDPS工业机器人虚拟调试仿真PD基础教程,焊点分配到工位:
1、将工艺树PrLine和焊点分别加载(右键Add Root)到操作数窗口和制造特征树窗口,然后在操作树中选择工作站Przone1,如下图所示;
2、在菜单栏中选择应用模块一栏下面的自动焊点分布命令,弹出自动焊点分布对话框,进行焊点分配到工位的操作,如下图所示;
3、在自动焊点分布窗口中点击设置按钮,弹出设置对话框中操作类型选择PrStationProcess,点击确定后可以清楚的看到焊点向工位的分配情况,仔细检查焊点分配是否正确,无误后进行下一步;
4、确认无误后选择Apply All全部应用,所有焊点的Status状态列显示Connected已连接,表示已经分配完毕,选择Close关闭对话框;
5、选中PrZone打开Pert Viewer对话框,可以看到在OP10的左下角出现焊点图标,数字14表示在这个工位要焊14个点,OP20这个工位要焊13个点,如下图所示;
6、在Pert Viewer(PERT图)对话框中选中OP10,然后点击鼠标右键选择Properties属性,打开OP10的属性窗口,在属性对话框的制造特征栏查看所有分配到这个工位的焊点。
在属性窗口的产品栏查看所有分配到这个工位的零件,如下图所示;
以上就是PD软件中焊点分配到工位的过程以及操作步骤,焊点也可以在PS软件中进行分配,直接拖动到相应的机器人操作下面即可。
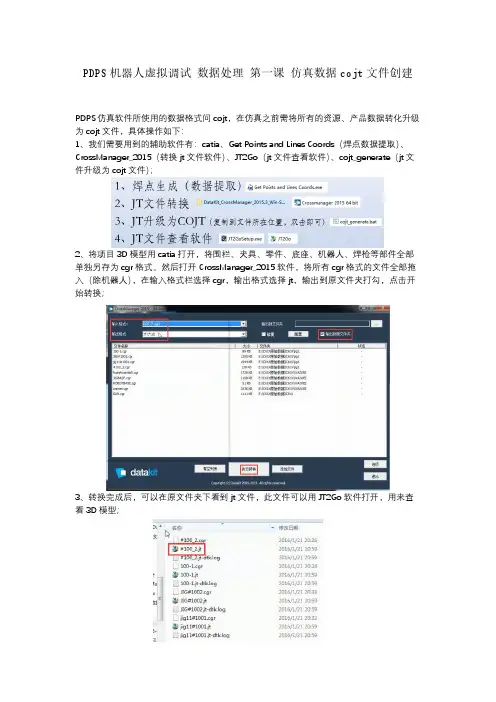
PDPS机器人虚拟调试数据处理第一课仿真数据cojt文件创建PDPS仿真软件所使用的数据格式问cojt,在仿真之前需将所有的资源、产品数据转化升级为cojt文件,具体操作如下:1、我们需要用到的辅助软件有:catia、Get Points and Lines Coords(焊点数据提取)、CrossManager_2015(转换jt文件软件)、JT2Go(jt文件查看软件)、cojt_generate(jt文件升级为cojt文件);2、将项目3D模型用catia打开,将围栏、夹具、零件、底座、机器人、焊枪等部件全部单独另存为cgr格式。
然后打开CrossManager_2015软件,将所有cgr格式的文件全部拖入(除机器人),在输入格式栏选择cgr,输出格式选择jt,输出到原文件夹打勾,点击开始转换;3、转换完成后,可以在原文件夹下看到jt文件,此文件可以用JT2Go软件打开,用来查看3D模型;4、通过catia将机器人模型各个关节轴单独保存cgr为格式,然后用cgr文件创建机器人装配体,将catia装配图拖到CrossManager_2015软件,输入格式选择catiaV5,输出格式选择jt,点击开始转换;5、所有数据转换完成后,将cojt_generate复制到jt文件所在目录下;6、双击cojt_generate,此文件夹下所有jt文件将会升级为cojt文件(即jt文件被cojt文件夹包裹),此时除了cojt文件夹其他的文件都可以删除,如下图;7、在catia中新建零件,将所有焊点全部新建“点”,如下图所示;8、选中零件几何体(图中1),然后双击打开Get Points and Lines Coords焊点数据提取程序(图中2),点击Points(图中3),完成后所有焊点xyz坐标数据将被复制;9、新建excel文件,打开,将数据粘贴;10、输入公式(=B2&”,“&C2&”,“&D2),单元格将以x,y,z形式显示焊点的坐标数据;11、完成所有焊道,选中复制;12、所有焊道数据复制后,打开handian.csv文件,将复制的焊道数据选择性粘贴在J列location下(格式为数据格式),保存,焊点文件完成;13、数据处理完成后,打开PD新建项目,添加资源库将刚刚完成的数据全部导入,定义各资源的属性(此时cojt文件夹下面会多一个xml文件),打开PS,然后可以直接在本地磁盘上选中cojt文件夹拖到PS中打开;PDPS机器人虚拟调试数据处理第二课co数据升级为cojtCo文件为Robcad仿真软件数据类型,在使用PDPS进行仿真前就需要将co文件升级为cojt文件,升级后的文件数据会小很多。
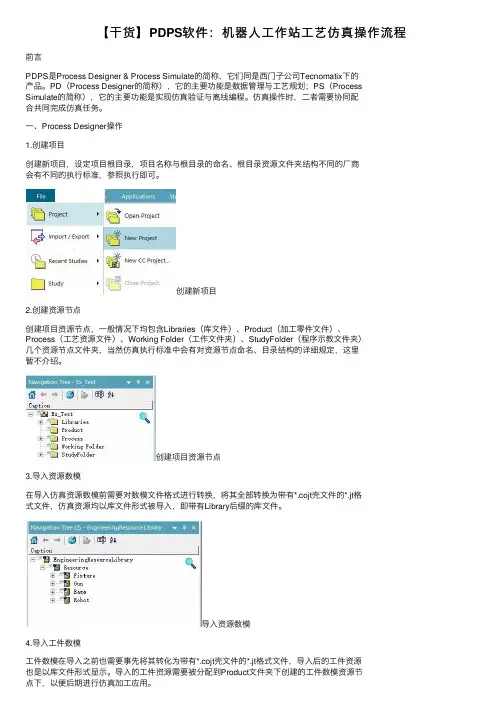
【⼲货】PDPS软件:机器⼈⼯作站⼯艺仿真操作流程前⾔PDPS是Process Designer & Process Simulate的简称,它们同是西门⼦公司Tecnomatix下的产品。
PD(Process Designer的简称),它的主要功能是数据管理与⼯艺规划;PS(Process Simulate的简称),它的主要功能是实现仿真验证与离线编程。
仿真操作时,⼆者需要协同配合共同完成仿真任务。
⼀、Process Designer操作1.创建项⽬创建新项⽬,设定项⽬根⽬录,项⽬名称与根⽬录的命名、根⽬录资源⽂件夹结构不同的⼚商会有不同的执⾏标准,参照执⾏即可。
创建新项⽬2.创建资源节点创建项⽬资源节点,⼀般情况下均包含Libraries(库⽂件)、Product(加⼯零件⽂件)、Process(⼯艺资源⽂件)、Working Folder(⼯作⽂件夹)、StudyFolder(程序⽰教⽂件夹)⼏个资源节点⽂件夹,当然仿真执⾏标准中会有对资源节点命名、⽬录结构的详细规定,这⾥暂不介绍。
创建项⽬资源节点3.导⼊资源数模在导⼊仿真资源数模前需要对数模⽂件格式进⾏转换,将其全部转换为带有*.cojt壳⽂件的*.jt格式⽂件,仿真资源均以库⽂件形式被导⼊,即带有Library后缀的库⽂件。
导⼊资源数模4.导⼊⼯件数模⼯件数模在导⼊之前也需要事先将其转化为带有*.cojt壳⽂件的*.jt格式⽂件,导⼊后的⼯件资源也是以库⽂件形式显⽰。
导⼊的⼯件资源需要被分配到Product⽂件夹下创建的⼯件数模资源节点下,以便后期进⾏仿真加⼯应⽤。
导⼊⼯件数模5.导⼊焊点数据PD中机器⼈焊点信息通常需要从外部导⼊,⽀持导⼊的数据⽂件格式包括:*.xml、*.ppd、*.csv。
其中,*.csv格式机器⼈焊点⽂件制作⽅法之前为⼤家介绍过了,这⾥不再赘述。
导⼊的机器⼈焊点数据同样以库⽂件形式显⽰,使⽤是需要将其投影到焊接板件上。
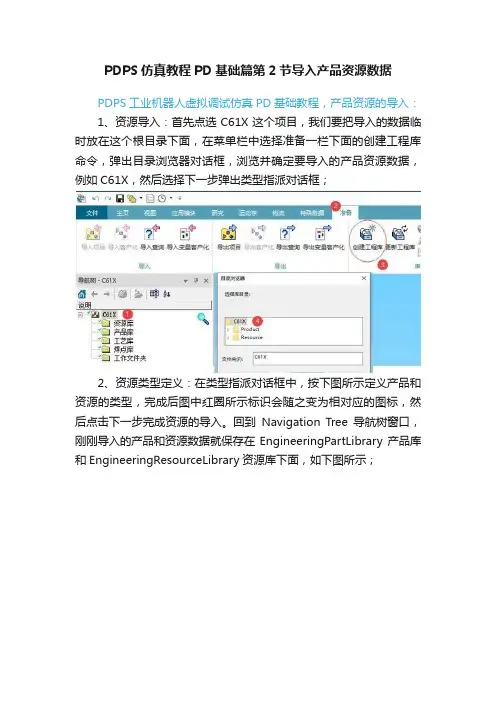
PDPS仿真教程PD基础篇第2节导入产品资源数据PDPS工业机器人虚拟调试仿真PD基础教程,产品资源的导入:1、资源导入:首先点选C61X这个项目,我们要把导入的数据临时放在这个根目录下面,在菜单栏中选择准备一栏下面的创建工程库命令,弹出目录浏览器对话框,浏览并确定要导入的产品资源数据,例如C61X,然后选择下一步弹出类型指派对话框;2、资源类型定义:在类型指派对话框中,按下图所示定义产品和资源的类型,完成后图中红圈所示标识会随之变为相对应的图标,然后点击下一步完成资源的导入。
回到Navigation Tree导航树窗口,刚刚导入的产品和资源数据就保存在EngineeringPartLibrary产品库和EngineeringResourceLibrary资源库下面,如下图所示;3、选中刚导入的产品库和资源库按住鼠标左键,拖拽到资源目录下面,然后选择EngineeringPartLibrary,点击鼠标右键,选择NavigationTree,在新的窗口中打开产品库并展开,可以看到此产品库中所有的零件,如下图所示;4、查看产品属性:选中任意一个零件,点击鼠标右键,选择Properties,打开属性窗口,在属性的常规栏中,我们可以查看并修改零件的名称、编号,添加标注。
在属性的Physical物理栏中,可以查看并修改零件的2D和3D文件路径、材料、重量、尺寸以及零件的预览图等信息;5、当产品资源导入成功后,本地文件夹目录下会多出xml文件,此文件记录了在导入过程中产品资源所定义的类型,若需重新导入定义产品资源类型需将此xml文件删除,若需替换更新产品资源,可直接用新jt文件替换此目录下的jt文件(新的jt文件名称需改为当前目录下jt文件名称);6、导入焊点:选择C61X,点击鼠标右键展开菜单列表,然后选择Import Object命令,选择焊点文件导入(格式为csv),导入成功后将MfgLibrary文件拖到焊点库下面,其他的文件删除,如下图所示;以上就是PD软件中产品、资源、焊点的导入过程以及操作步骤。
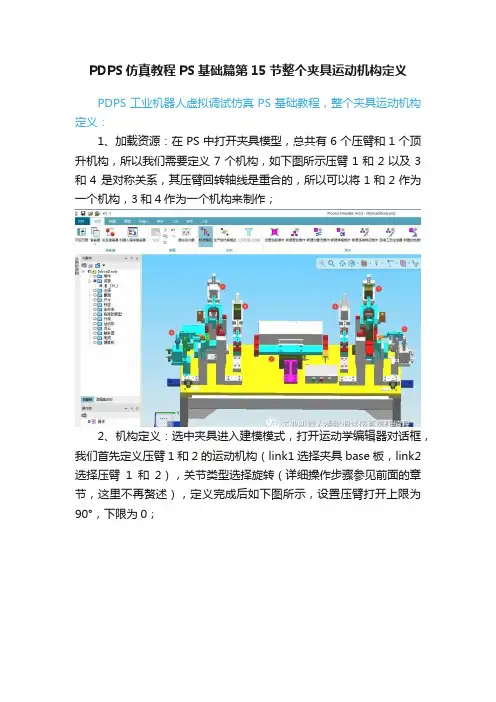
PDPS仿真教程PS基础篇第15节整个夹具运动机构定义PDPS工业机器人虚拟调试仿真PS基础教程,整个夹具运动机构定义:1、加载资源:在PS中打开夹具模型,总共有6个压臂和1个顶升机构,所以我们需要定义7个机构,如下图所示压臂1和2以及3和4 是对称关系,其压臂回转轴线是重合的,所以可以将1和2作为一个机构,3和4作为一个机构来制作;2、机构定义:选中夹具进入建模模式,打开运动学编辑器对话框,我们首先定义压臂1和2的运动机构(link1选择夹具base板,link2选择压臂1和2),关节类型选择旋转(详细操作步骤参见前面的章节,这里不再赘述),定义完成后如下图所示,设置压臂打开上限为90°,下限为0;3、重复上述步骤,定义压臂3和4的运动机构(link3选择压臂3和4),关节类型选择旋转,设置压臂打开上限为105°,下限为0;4、重复上述步骤,定义顶升机构(link4选择顶升机构),关节类型选择移动,设置顶升上限为50°,下限为0;5、压臂5、6机构为铰链式夹具夹头机构,接下来先定义压臂5,点击创建曲柄按钮,弹出创建曲柄对话框选择PRRR类型,下一步;6、定义过程类似第13节,如下图选择关节坐标和平面(如果各关节中心无法选择,则需创建坐标系),下一步;7、选中带偏置,然后选择气缸导杆中心上两点,如下图所示,下一步;8、固定连杆选择现有连杆link1,然后其余连杆单元在三维视图中选择,完成;9、重复上述步骤,完成压臂6的机构定义,设置压臂5和6的运动下限为-45,上限0,结果如下图所示;10、打开姿态编辑器,设置如下状态(OPEN为夹具打开,CLOSE为夹具关闭,UP为顶升机构顶出,DOWN为顶升机构回落);11、选中夹具,结束建模,接下来我们新建一个复合操作,然后在这个复合操作下面新建设备操作,如下图所示;12、将复合操作设置为当前操作,打开序列编辑器,使刚刚创建的操作按顺序链接,点击播放按钮,查看整个夹具动作。
PDPS机器人虚拟调试弧焊仿真第四课运动机构仿真示教
接着上一讲,所有运动机构定义完成后开始仿真示教。
1、按OP10工位的整个工艺流程,首先仿真夹具机构动作,按下图所示在OP10夹具关闭复合操作下面新建4个设备操作(夹具动作顺序为:顶升机构回落、进销装件、进销侧压、全压),其中装件部分后续人机工程章节再行详细讲解,这里以隐藏显示来表示装件过程;
2、在序列编辑器窗口中,选中回落操作点击鼠标右键,选择隐藏事件,弹出对话框选择OP10工位的零件,在回落任务开始的同时将工件隐藏。
同理在进销任务结束的同时将工件显示,完成后如下图所示,点击播放按钮查看效果;
3、外部轴动作示教:外部轴的运动既可以通过新建设备操作来实现,也可以新建通用机器人操作,通过机器人控制外部轴来实现,上一课中已经将3个外部轴添加到机器人RB1,这里不再重复操作。
下面以新建通用机器人操作为例来操作,如下图所示;
4、将新建的通用机器人操作添加到路径编辑器窗口,以当前位置添加2个点并修改名称,然后设置其外部轴数值,外部轴动作为夹具OP10从装件位置转动到焊接反面位置,如下图所示;
5、重复上述操作步骤,仿真除机器人焊接以外的所有操作,完成后结果如下图所示;
以上为外部机构动作仿真示教,完成可以点击播放按钮查看整体动作流程,接下来进行机器人焊接仿真示教。
PDPS虚拟调试仿真文件输出第3节项目保存
使用PDPS软件做完仿真项目后,我们需要将仿真数据发给其他人查看,这时可以做以下处理:
psz文件处理步骤:
1、首先新建一个Export的文件夹(文件夹不要用中文名称,否则后续无法打开),将另存的数据保存在这个文件里面,然后在PS软件中直接选择另存为命令,将仿真项目另存一个psz文件和压缩包;
2、在另存为对话框中,保存位置选择刚创建的文件夹,文件类型选择第二个(psz和压缩包),点击保存。
弹出对话框选择刚创建的文件夹;
3、保存完成后,如下图所示(psz文件和压缩包),解压后即可
打开使用;
PD项目处理步骤:
1、用PD打开已经创建好的项目,选中项目然后在工具栏文件下面选择导出对象命令或者在准备一栏下面选择导出项目命令。
创建包含整个项目或者部分项目的XML文件,保存到当前项目文件夹里面;
2、在导出对话框中,选择XML文件的保存路径(当前项目文件所在位置),点击保存,导出完成后会弹出导出成功对话框;
3、完成后项目文件夹里会多一个XML文件,我们将整个项目文件夹压缩后就可以发给别人打开查看。
接下来我们将此项目的存放路径修改一下,然后用PD软件打开测试一下。
首先打开PD软件,按F6修改项目的存放路径。
然后在工具栏准备一栏下面选择导入项目命令,在导入对话框中选择刚刚保存的XML文件,点击导入,整个项目将被加载进来,包括PS中做的仿真运动;
以上就是PDPS软件中项目保存的操作方法步骤,每一个项目这些都是必须要进行的操作,及时保存备份以免PD文件丢失。
PDPS仿真软件之点云技术随着计算机、微电子、信息和自动化技术的迅速发展,并在制造业中得到越来越广泛的应用,而先后出现了数控、柔性制造单元、柔性制造系统、计算机辅助设计/制造、计算机集成制造系统、制造资源规划、精益生产、敏捷制造、可重组技术、三维扫描技术、快速原型制造等多项先进制造技术与制造模式。
制造业正经历一场新的技术革命。
目前制造技术已发展成为一个蕴涵整个生产过程,跨学科高度复杂的集成技术,三维扫描技术正是其中重要的一项。
三维重建技术是计算机视觉、逆向工程、虚拟现实等研究领域中的一个重要问题,是计算机图形学的重要组成部分。
随着科学技术的不断发展,传统的基于图像的三维重建方法由于在精确度上、重建速度上、算法适用性上都有着不可避免的缺陷,已很难满足人们对高精度、真实感三维模型建模和绘制的要求,而基于点云的三维重建技术可以直接通过物体表面离散点简单快捷地重构出高度真实的三维模型,因此已成为当前三维重建技术研究的热点,也是其中的重点和难点。
通过三维激光扫描仪采集物体表面点云,接着对采样点云进行简化处理,进而对简化后的点云采用网格前沿生成算法进行三角网格化,从而恢复出具有真实感的三维物体网格表面模型。
工厂激光扫描的点云和仿真技术的应用流程如下:结合Tecnomatix 软件将在工厂激光扫描的点云和仿真技术紧密地融合,利用扫描设备对象扫描成点云,可直接导入Process Designer 中,从而更紧密地将现实工厂与虚拟工厂结合,不断地优化和仿真确认得到最佳的工厂设计方案。
点云是一组数据点,表示一个三维系统,通常由一个三维扫描仪创建。
在点云的点代表一个扫描三维物体的外表面。
使用3D 扫描仪,可以扫描复杂的对象(例如,制造厂),创建扫描物体的3D 模型,并存储该结果作为一个点云文件。
然后,您可以导入POD 格式(如果需•调查&扫描•仿真验证要的话,首先将其转换为POD格式)的点云到Process Designer,就像任何其他的对象,它可以显示在图形查看器和对象树。
PDPS仿真教程PD基础篇第4节分配焊点数据PDPS工业机器人虚拟调试仿真PD基础教程,分配焊点资源:1、在导航树窗口中选择焊点库下面的焊点文件,然后右键Navigation Tree打开这个焊点库并将其展开;2、查看焊点属性:选择任意一个焊点,打开属性窗口,在General常规栏查看焊点的名称和类型。
在Physical物理栏查看焊点的空间位置坐标,点击Modify修改按钮之后,在弹出的窗口内可以修改焊点的空间位置;3、特征制造树窗口:焊点分配之前需要将其加载到特征制造树窗口,首先展开菜单栏主页下面的查看器子菜单,选择制造特征树打开,焊点只有被加载到Mfg Tree制造特征树这个窗口之后才能进行浏览、分配等操作;4、显示焊点:在Mfg Tree制造特征树窗口选中所有的焊点,点击鼠标右键,选择Display,当所有焊点前面的空白方框变成蓝色之后,我们就可以在图形窗口查看焊点的三维显示,如下图所示;5、焊点分配:在Mfg Tree制造特征树中选择所有的焊点,选择菜单栏中的应用模块下面的自动零件指派命令,弹出自动零件指派对话框,选择Settings设置分配参数,在Distance距离栏设置5,即搜索和焊点的距离在5mm以内的零件;在可见列Visible Columns栏设置4,即允许最多搜索到4个满足条件的零件,分4列显示在焊点分配窗口,如下图所示;6、焊点分配:在自动零件指派对话框中选择Search开始搜索,找到的零件依次列在窗口中,大部分焊点都找到了2个相关零件,个别焊点找到3个、4个相关零件,我们在焊点分配窗口用不同的颜色表示不同的零件,如下图所示;7、焊点分配:搜索完成后选中所有的焊点,选择Assign图中的对号,把焊点分配到这些零件上,成功分配之后,所有零件的名称变亮,图中第一部分所显示的零件即零件所附着的零件,会随着零件一起移动,关闭窗口;8、选择任一个焊点,打开属性窗口,选择Product产品栏,可以看到,该焊点已分配到下面两个零件中,选择任一个零件,打开属性窗口,选择Mfg Features制造特征栏,可以看到分配到该零件上的所有焊点;以上就是PD软件中焊点分配到产品的过程以及操作步骤。
pdps仿真工程师实践总结为期三周的仿真实训在周五下午的考试后结束了,在这紧张而又愉快的十五天里,我们主要用仿真软件犹如身临其境的对化工单元的实验操作和知识要点做了深刻的实训,仿真心得体会。
按照老师的安排,前两天我们针对离心泵单元做专项训练,接着两天在固定床反应器单元专心攻克,依次是间歇釜反应单元,精馏单元,吸收解析单元各个单元进行专项练习。
按照这个计划实行下来,我有了不少心得与体会,这里面当然有好的方面也有不足的地方,就这些心得我做了一下总结。
由于我们正在学习化工原理各项单元,加上之前进行的实验环节,其原理和仪器设备我已在课本上有了大概的了解,所以对它的一些术语并不陌生,进行起来比较顺利。
在仿真实验中除了一些软件必要的过程之外,其他实验操作使我深刻了解到真实实验操作中对连锁,串级等等的使用,然后是查看压力表是否达到要求压力,不是就再调整减压阀;之后调节气体流量;打开主机总开关,在温度控制器中根据实验要求进行调节;还有间歇反应釜单元的温度调节很关键,温度控制在110~120之间,就要求我们在操作过程中一定要按照步骤中规定的进行操作,操作熟练之后从中自己可以摸索出一些经验,但是其中的步骤顺序不可以颠倒。
在知识要点方面,通过这样的学习比单记课本上的知识要容易深刻的多,而且巩固学过的知识,印象更深刻。
由于仿真对于我们来说就是一个新鲜事物,因为我们之前没有接触过,无论是仪器还是知识要点,我都不是很了解,幸好在课下对其大致看了一遍才使实训得以继续下去。
电脑操作时,在选择要做的单元后,找到单元操作步骤,然后熟悉此单元的流程,再将原理,步骤,流程图,现场图,dcs图进行综合分析,最后在将进行仿真练习,经过这次仿真实训后,我对其相关仪器有了一定的了解,不再是单凭想象了,这更有利于我以后在实际工作对仪器的操作,而且把相应技能和知识提升到一个新的层次。
当然,在这次实训中,还有许多不足,很多具体的操作环节还没有搞懂,因为相应步骤只要做了就能得分,就没有再去追究,这种得过且过的作为以后要改正。