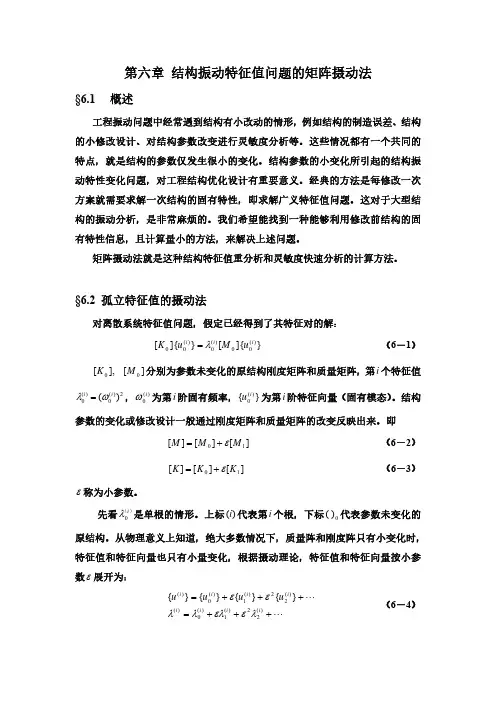
孤立特征值情况的矩阵摄动法
- 格式:doc
- 大小:217.00 KB
- 文档页数:4
4行1列矩阵的特征值
矩阵的特征值是线性代数中的一个重要概念,它对于理解矩阵的性质和行为起着关键作用。
对于一个给定的矩阵,我们可以通过特定的数学方法来找出其特征值。
首先,我们需要明确什么是特征值。
特征值是满足方程Ax=λx的标量λ,其中x是非零向量,A是给定的矩阵。
在这个方程中,λ就是我们要找的特征值,而x是相应的特征向量。
对于一个4行1列的矩阵,我们可以将其表示为[
a b c d
]。
这个矩阵只有一个特征值,因为只有一个未知数出现在特征方程中。
为了找到这个特征值,我们需要解特征方程。
对于一个4行1列的矩阵,特征方程是a λ−b=0,其中a,b,c,d是矩阵中的元素。
解这个方程,我们得到λ=
a
b。
这就是4行1列矩阵的特征值。
需要注意的是,特征值的计算依赖于矩阵的元素。
如果矩阵中的元素满足特定的关系或条件(例如,所有元素都相等或某些元素为零),那么特征值的计算可能会有所不同。
因此,在计算特征值时,我们需要仔细考虑矩阵的元素和它们之间的关系。
此外,特征值在许多领域都有应用,包括物理学、工程学、经济学等。
例如,在物理学中,特征值可以用来描述量子系统的能量级别;在工程学中,特征值可以用来分析结构的稳定性;在经济学中,特征值可以用来研究金融市场的波动性。
因此,理解特征值的计算方法对于这些领域的研究者来说是非常重要的。
高等代数摄动法(Perturbation Theory in Linear Algebra)是一种在高等代数领
域中应用的数学技术,用于研究线性代数问题中小扰动引起的解的变化。
它在许多科学和工程领域中都有广泛的应用,包括物理学、化学、工程学和经济学等。
摄动法的基本思想是通过将问题分解为一个已知的基本问题和一个小扰动的形式,来近似求解原始问题。
这种近似方法可以用于求解矩阵特征值和特征向量的变化、线性方程组的解的变化、矩阵的特定函数的变化等。
具体而言,高等代数摄动法通过展开原始问题的解为扰动项的级数,并通过迭代逐步计算更高阶的摄动项来逼近真实解。
通常情况下,前几个级数项已经足够近似原始问题的解,而更高阶的项可以提供更精确的近似。
高等代数摄动法的应用需要对线性代数的基本理论和方法有一定的了解。
它在实际问题中的应用可以帮助我们理解线性系统的变化规律,以及对系统做出更精确的预测和分析。
总而言之,高等代数摄动法是一种在高等代数中用于近似求解线性代数问题的数学技术,通过展开原始问题的解为扰动项的级数,来研究小扰动引起的解的变化。
它在科学和工程领域中有广泛的应用。
Weyl型定理的一种新形式及其摄动
吴珍莺
【期刊名称】《福建师范大学学报:自然科学版》
【年(卷),期】2018(34)1
【摘要】称有界线性算子T具有性质(u),如果T的上半Weyl谱在T的谱中的补集恰好就是T的孤立谱点中的特征值全体.研究了性质(u)与各种Weyl型定理之间的关系,性质(u)在交换幂零、拟幂零、幂有限秩和Riesz摄动下的稳定性,并给出了关于这些理论结果的有趣例子.
【总页数】4页(P1-4)
【关键词】Banach空间;Weyl型定理;性质(u);摄动
【作者】吴珍莺
【作者单位】福建师范大学数学与信息学院
【正文语种】中文
【中图分类】O177.2
【相关文献】
1.一种基于 Weyl 定理的数字图像加密传输方法* [J], 孙文杰
2.拓扑一致降标与Weyl定理的摄动 [J], 崔苗苗;曹小红
3.微小摄动下SVEP与Weyl型定理的关系 [J], 董炯;曹小红;刘俊慧
4.广义Kato分解与Weyl型定理 [J], 陈俐宏;苏维钢
5.有界线性算子的Weyl型定理及亚循环性 [J], 王静;曹小红
因版权原因,仅展示原文概要,查看原文内容请购买。
第六章矩阵的特征值和特征向量知识点梳理(一).相似的概念:1.定义:_______________________________________________________________________。
2.性质:(1).____________________________________________________________________。
(2).____________________________________________________________________。
(3).____________________________________________________________________。
(二).矩阵的特征值和特征向量1.定义:_____________________________________________________________________________________________________________________________________________________________________________________________________________________ 2.求矩阵A的特征值和特征向量的步骤:(1).___________________________________________________________________________(2).______________________________________________________________________________________________________________________________________________________ ___________________________________________________________________________。
南京航空航天大学博士学位论文结构动力学中的特征值反问题姓名:***申请学位级别:博士专业:一般力学与力学基础指导教师:***20060601南京航空航天大学博士学位论文摘要本文研究了结构动力学中的特征值反问题,包括弹簧-质点系统振动反问题、离散梁振动反问题、阻尼振动系统的振动反问题以及振动杆结构探伤问题。
全文主要包括以下内容:首先,研究了弹簧-质点系统的振动反问题。
对二自由度简单连接度弹簧-质点系统分别通过加刚性约束、弹性约束和质量摄动得到修改系统,研究了利用原系统和修改系统的两组特征值(频率)和修改量识别系统的物理参数问题,给出了解的表达式。
对于多自由度简单连接度弹簧-质点系统,研究了增容修改系统的频率反问题。
提出了由多自由度简单连接弹簧-质点系统的四个和五个特征对(频率和模态)识别系统物理参数的振动反问题,分别研究了解的存在性,给出了解的表达式、相应算法和算例。
提出并研究了一类混合连接弹簧-质点系统的振动反问题,提出了利用三个特征对(频率和模态)以及部分系统物理参数识别系统其它物理参数的振动反问题,研究了解的存在性,给出了解的表达式、相应算法和模型算例。
其次,研究了有限差分离散梁振动反问题,利用有限差分法得到振动梁的弹簧-质点-刚杆模型,质量矩阵为对角矩阵而刚度矩阵为对称五对角矩阵。
提出了基于三个特征对的频率模态反问题,研究了解的存在性,给出了解存在惟一的充要条件和解的表达式、数值算法和算例。
再次,研究了阻尼振动系统中的二次特征值反问题。
研究了阻尼弹簧-质点系统的物理参数识别,包括:由全部频率信息模态识别阻尼振动系统的结构物理参数;由部分频率模态信息识别比例阻尼振动系统的结构物理参数;由两对频率模态信息识别比例阻尼振动系统的结构物理参数;由频率模态信息识别非比例阻尼振动系统的结构物理参数。
对每种提法分别研究了问题解的存在性,给出了数值算法,并对每种问题给出了阻尼振动模型算例。
最后,研究了振动杆结构探伤的特征值反问题。
特征值组的摄动法摄动法是一种研究复杂系统时常用的数值积分方法。
它将一个复杂的时间曲线上的某种状态,划分为若干个离散时间步,每一步分别用固定的起始条件和特征值组的摄动法来计算时间步的终止条件,从而求得被研究的状态。
在本文中,我们将研究特征值组的摄动法,并详细分析其原理及特点。
特征值组的摄动法基于以下这一基本思想:在一个时间步中,具有相同特征值的系统只会有一个状态。
即,如果两个系统具有相同的特征值,那么它们在任何时刻上它们所处的状态也是一样的。
这里特征值指的是某个系统的某些性质,如物理量,动能,势能等等。
因此,一个系统的某种状态可以通过它的特征值来描述。
基于这一思想,我们可以定义一组特征值组,它们在同一个时间步中代表着某一个特定的状态。
在每一个时间步,系统的特征值会发生变化,但是一组特征值组始终保持不变,因此,它们可以用来描述系统在某一个特定时刻的状态。
摄动法就是根据这一思想,划分一个复杂时间曲线上的某种状态,并用下一个特征值组的摄动法,来求得它的未来状态。
具体来说,特征值组的摄动法可以描述为:在每个时间步,我们以一组初始特征值组S0作为输入,根据它们求得下一步的特征值组S1,然后以S1作为输入,求得更后一步的特征值组S2,以此类推,直至找到最终的特征值组Sf,它代表着某个特定时刻的系统状态。
一般而言,特征值组的摄动法比一般时间步积分方法更加精确和可靠,它有两个主要优点:首先,特征值组的摄动法可以在每个时间步较准确地把系统的状态描述出来,这使得它在研究超过一定复杂度的系统时可以比较精确地模拟出来。
其次,特征值组的摄动法可以有效地刻画出系统的变化特性,无论是系统是稳定还是混沌,它都能很好地描述出来。
因此,特征值组的摄动法是一种非常有用的积分方法,它可以有效地模拟复杂系统的状态,而且因为其精确性和可靠性,特征值组的摄动法已经被用于研究复杂系统中的各种相关问题。
本文介绍了特征值组的摄动法的原理及特点,它是一种有效的积分方法,可以非常准确和可靠地模拟出复杂系统的状态,在许多系统研究领域得到广泛应用。
矩阵特征值求法的十种求法(非常经典)以下是矩阵特征值求法的十种经典求法:1. 幂法(Power Method)幂法(Power Method)幂法是求解特征值的常用方法之一。
它基于一个重要的数学原理:对于一个非零向量$x$,当它连续乘以矩阵$A$的$k$次幂后,$Ax$的方向将趋于特征向量相应的特征值。
这种方法通常需要进行归一化,以防止向量过度增长。
2. 反幂法(Inverse Power Method)反幂法(Inverse Power Method)反幂法是幂法的一种变体。
它通过计算矩阵$A$的逆来求解最小的特征值。
使用反幂法时,我们需要对矩阵$A$进行LU分解,以便更高效地求解线性方程组。
3. QR方法QR方法QR方法是一种迭代方法,可以通过将矩阵$A$分解为$QR$形式来逐步逼近特征值。
这种方法是通过多次应用正交变换来实现的,直到收敛为止。
QR方法不仅可以求解特征值,还可以求解特征向量。
4. Jacobi方法Jacobi方法Jacobi方法是一种迭代方法,通过施加正交相似变换将矩阵逐步变为对角矩阵。
在每个迭代步骤中,Jacobi方法通过旋转矩阵的特定元素来逼近特征值。
这种方法适用于对称矩阵。
5. Givens旋转法Givens旋转法Givens旋转法是一种用于特征值求解的直接方法。
它通过施加Givens旋转矩阵将矩阵逐步变为对角矩阵。
这种方法是通过旋转矩阵的特定元素来实现的。
6. Householder变换法Householder变换法Householder变换法是一种用于特征值求解的直接方法。
它通过施加Householder变换将矩阵逐步变为Hessenberg形式,然后再进一步将其变为上三角形式。
这种方法是通过对矩阵的列向量进行反射来实现的。
7. Lanczos方法Lanczos方法Lanczos方法是一种迭代方法,用于对称矩阵的特征值求解。
该方法创建一个Krylov子空间,并使用正交投影找到最接近特征值的Krylov子空间中的特征值。
一个高效率的有限元矩阵摄动法程序
侯新录
【期刊名称】《太原重型机械学院学报》
【年(卷),期】1996(017)002
【摘要】本文介绍了有限元矩阵摄动法的编程原理,研究了提高计算速度的措施,算例说明了算法和程序的效率。
【总页数】6页(P133-138)
【作者】侯新录
【作者单位】无
【正文语种】中文
【中图分类】O327
【相关文献】
1.利用C语言开发高效率的有限元程序 [J], 叶又;戚燕
2.一个大型有限元分析程序的微机化技术与微机版程序的工程应用 [J], 华伯浩;俞桂平;等
3.Matrix Generator(MG):一个基于DNA片段的0/1矩阵生成程序 [J], 周世
良;Peter QIAN
4.基于MATLAB和矩阵位移法的平面杆系结构有限元程序设计 [J], 阙仁波
5.求解动态有限元法中二次矩阵特征值问题的迭代摄动法 [J], 桂国庆;张维奇
因版权原因,仅展示原文概要,查看原文内容请购买。

汽车四轮转向系统五自由度动力学模型作者:王敬, 王勇, 张艳芳, WANG Jing, WANG Yong, ZHANG Yan-Fang作者单位:重庆交通大学,机电与汽车工程学院,重庆,400074刊名:河北理工大学学报(自然科学版)英文刊名:JOURNAL OF HEBEI INSTITUTE OF TECHNOLOGY(NATURAL SCIENCE EDITION)年,卷(期):2008,30(3)引用次数:0次1.王京二自由度4WS汽车的动力分析(Ⅰ)--线性分析[期刊论文]-华南理工大学学报(自然科学版) 2001(6)2.姚永建.韩强四轮转向汽车的非线性模型及其动力方程[期刊论文]-华南理工大学学报(自然科学版) 2003(11)3.靳晓雄汽车振动分析 20024.S.M.凯利.贾启芬机械振动 20025.Dave Crolla.喻凡车辆动力学及其控制 20046.YOU S S.CHAI Y H Multi-objective control synthesis:an application to 4ws passenger vehicles 19997.郭孔辉汽车操纵动力学 19918.喻凡.林逸汽车系统动力学 20051.期刊论文付江华.巢凯年.丁建明.FU Jiang-hua.CHAO Kai-nian.DING Jian-ming质心转移对四轮转向汽车转向特性的影响-西华大学学报(自然科学版)2007,26(4)为了分析汽车质量和质心位置对四轮转向汽车操纵稳定性影响,本文根据二自由度四轮转向车辆的动力学模型,运用Matlab/Simulink对四轮转向特性进行仿真研究,讨论分析了汽车质量和质心位置的改变,对四轮转向车辆转向特性的影响.研究结果表明,汽车质心转移过大时,汽车操纵稳定性大大降低.2.学位论文宋作军四轮转向汽车的操纵稳定性研究2007四轮转向(4WS)的含义是指汽车除了通常的前轮转向之外,附加相应的后轮转向。
特征值与特征向量在不同矩阵的变换规则特征值与特征向量是线性代数中的重要概念,它们在不同矩阵的变换中起着关键作用。
首先,我们要明确什么是特征值和特征向量。
一个矩阵A的特征值λ和特征向量x满足关系Ax=λx。
简单来说,特征值就是当矩阵乘以一个向量得到的结果是该特征值的向量时,这个特征值就是特征值,而那个向量就是对应的特征向量。
接下来,我们来看看特征值和特征向量在不同矩阵变换中的表现。
1、旋转矩阵:对于2D旋转矩阵,其特征值和特征向量具有特定的性质。
假设我们有一个旋转矩阵R(θ),它的特征值会是exp(iθ)和exp(-iθ),而对应的特征向量则会随着角度θ的变化而变化。
这意味着当我们对一个向量进行旋转时,这个向量的方向可能会发生变化,但长度和起点到终点的“距离”会保持不变。
2、缩放矩阵:缩放矩阵的特征值和特征向量与缩放的比例因子直接相关。
如果我们在矩阵的某个方向上进行了缩放,那么该方向上的特征向量长度会发生变化,但与该方向垂直的特征向量长度则不会变。
3、错切矩阵:错切矩阵可以看作是旋转矩阵和缩放矩阵的组合。
它的特征值和特征向量的关系也较为复杂,但可以通过对旋转和缩放矩阵的特征值、特征向量的理解来推导。
4、透视变换矩阵:透视变换矩阵的特征值和特征向量的关系则更为复杂,涉及到多个参数的调整。
这种变换通常用于模拟三维空间中的物体投影效果。
在实际应用中,了解不同矩阵变换的特征值和特征向量的性质可以帮助我们更好地理解和控制这些变换。
例如,在计算机图形学中,通过调整特征值和特征向量的关系,我们可以实现各种复杂的变换效果;在物理仿真中,我们可以通过对物体施加特定的力或力矩来模拟物体的运动状态,而这些力或力矩的作用效果可以通过对物体刚度矩阵的特征值和特征向量的分析来预测。
综上所述,特征值和特征向量在不同矩阵变换中起着至关重要的作用。
通过对这些概念的理解和应用,我们可以更好地理解和控制各种变换效果,从而在各个领域实现更加精准和有效的计算和分析。
孤立特征值情况的矩阵摄动法
一、基本公式:
一阶摄动公式
二阶摄动公式
二、数值例子
图1
图1表示一个质量弹簧系统,设此系统的质量阵和刚度阵为错误!未找到引用源。
错误!未找到引用源。
取错误!未找到引用源。
分别为:
错误!未找到引用源。
错误!未找到引用源。
固有频率误差计算公式为:
振型向量误差计算公式为:
三、计算结果分析
1.各频率误差对比
结构参数改变
误差
图2 第一频率
结构参数改变
误差
图3 第二频率
结构参数改变
误差
图4 第三频率
2.各振型向量误差对比
结构参数改变
误差
图5 第一振型
结构参数改变
误差
图6 第二振型
结构参数改变
误差
图7 第三振型
可以看出在结构参数改变量在15%以下时,用一阶摄动法是可行的,当然使用二阶摄动法更精确。
当结构参数改变30%时,用二阶摄动法是可行的,使用一阶摄动法误差较大,不宜采用。
当结构参数改变40%时,即使用二阶摄动法,固有频率的平均误差仍有8.7%,振型向量平均误差仍有2.8%,这个误差是比较大的。
说明这时二阶摄动法也得不到足够的精度,需要用更高阶摄动法。
四、小结
通过本例,我们得到一些结论。
无论结构参数如何改变,本例的二阶
摄动法总是比一阶摄动法有更高的计算精度。
当结构参数改变小于15%时,用一阶摄动法已足够,可以不用二阶摄动法。
但当结构参数变化为15% ~ 30%时,就必须用二阶摄动法才能得到足够的计算精度。
矩阵分析与特征值问题矩阵是线性代数中的重要概念之一,研究矩阵的性质和特征对于解决实际问题以及在科学研究中具有重要意义。
本文将围绕矩阵分析与特征值问题展开讨论。
一、矩阵的定义与基本运算矩阵是一个由m行和n列元素排列所构成的矩形数表,常用大写字母表示。
矩阵的元素可以是实数、复数或者其他数域中的元素。
例如,一个3行2列的矩阵可以表示为:A = [a11, a12;a21, a22;a31, a32]在矩阵中,元素按照行和列的顺序进行编号,a_ij表示位于第i行第j列的元素。
矩阵的基本运算包括矩阵的加法、减法和数乘。
矩阵的加法和减法遵循相同的规则,即对应位置的元素相加或相减。
数乘则是将矩阵的每个元素乘以一个常数。
二、矩阵的转置与共轭矩阵的转置是将矩阵的行变为列,列变为行。
例如,对于矩阵A,其转置记为A^T,即矩阵A的第i行第j列的元素转置后变为第j行第i列的元素。
矩阵的共轭是指将矩阵中每个元素取其共轭复数。
对于实数矩阵而言,其共轭等于自身。
例如,对于复数矩阵A,其共轭记为A^*,即矩阵A的第i行第j列的元素共轭为第j行第i列的元素的共轭。
三、矩阵乘法与特征值问题矩阵乘法是矩阵运算中的重要操作之一。
两个矩阵的乘积是将第一个矩阵的行与第二个矩阵的列进行内积运算得到的。
例如,对于矩阵A和矩阵B的乘积C,其计算公式为:C = AB = [c11, c12, ..., c1n;c21, c22, ..., c2n;...cm1, cm2, ..., cmn]其中,c_ij表示矩阵A的第i行与矩阵B的第j列的内积。
特征值问题是矩阵分析中的一个重要问题,它涉及到矩阵的特征值和特征向量。
对于矩阵A,如果存在一个非零向量x,使得Ax = λx,其中λ为实数,则称λ为A的一个特征值,x为对应的特征向量。
特征值问题的求解可以通过矩阵的特征多项式来实现。
首先,根据矩阵A的特征多项式P(λ) = |A - λI|,其中I为单位矩阵,求解方程P(λ) = 0,得到矩阵A的特征值。
摄动法:高等代数引言代数是数学的一个重要分支,它研究数与符号之间的关系。
在高等代数中,我们研究的是一些更加抽象和复杂的代数结构和操作。
其中一个重要的概念就是摄动法(perturbation method)。
本文将深入探讨摄动法在高等代数中的应用。
什么是摄动法摄动法是一种数学技术,用于处理复杂问题中的近似解。
在高等代数中,我们常常遇到一些复杂的方程和变量,很难直接求解或理解其性质。
摄动法的思想是通过引入一个小的扰动参数,将原本复杂的问题逐步转化为更简单的问题。
通过适当的近似和迭代,我们可以得到原问题的近似解或精确解。
摄动法的基本原理摄动法的基本原理可以概括为以下几个步骤: 1. 引入扰动参数:将原问题表示为一个扰动问题,引入一个小的扰动参数ε。
2. 展开为级数:将原问题的解表示为关于扰动参数的级数展开,例如,x=x0+εx1+ε2x2+⋯。
3. 代入原方程:将级数展开代入原方程,从而得到各级的递推关系式。
4. 解递推关系:通过递推关系式解出各级的解,得到近似解或精确解。
摄动法的应用举例例子1:非线性方程的近似解考虑一个非线性方程e−x=εx,其中ε为小的正参数。
我们希望求解x的近似解。
1. 引入扰动参数:将原方程重写为e−x=εx。
2. 展开为级数:将x表示为级数展开形式x=x0+εx1+ε2x2+⋯。
3. 代入原方程:将级数展开代入原方程,得到递推关系式。
首先,代入到方程左侧,得到e−(x0+εx1+ε2x2+⋯)。
采用级数展开e−x=1−x+x22−x36+⋯,我们得到1−(x0+εx1+ε2x2+⋯)+(x0+εx1+ε2x2+⋯)22−(x0+εx1+ε2x2+⋯)36+⋯。
同理,代入到方程右侧,得到ε(x0+εx1+ε2x2+⋯)。
4. 解递推关系:将左右两侧对应项进行匹配,得到一系列递推关系式,例如x0的系数对应项为1−x0=0,则解得x0=1;x1的系数对应项为−1−x1+x02+1−x0=0,则解得x1=−1。
孤立特征值情况的矩阵摄动法一、基本方程设原始特征值问题是)~1(00000n i x M x K i i i ==λ (1)相应的正交规范条件是)~1,(000n j i x M x ij j Ti ==δ (2)或)~1,(0000n j i x K x iji j T i ==δλ其中,0M 、0K 分别是原系统的n n ⨯阶对称质量阵、刚度阵,0i λ是特征值,且200i i ωλ=,0i ω是固有频率,0i x 是相应的特征向量,ij δ是Kronecker 函数(j i =时,1=ij δ,j i ≠时,0=ij δ),下标n j i ~1,=。
以下为方便起见,均省去这一说明。
系统结构参数改变后,相应的质量阵、刚度阵均有相应的变化,设系统修改后的质量阵、刚度阵分别为⎩⎨⎧+=+=1010K K K M M M εε (3)式中ε是一个小参数,与0=ε对应的系统就是原系统(1),1M ε、1K ε分别代表0M 、0K 的变化,当01→M ε,01→K ε时,0M M →,0K K →。
显然,新系统(即结构修改后的系统或称摄动系统)的特征值问题及相应的正交规范条件是 i i i x M Mx K K )()(1010ελε+=+(4)ij j Ti x M M x δε=+)(10(5)其中,i λ为新系统的特征值,i x 是相应的特征向量。
如果原系统的0i λ各不相同,且相互间距不小,此时就称0i λ为系统(1)的孤立特征值。
在这种情况下,当1M ε、1K ε很小时,新系统的特征值i λ及相应的i x 均只有小变化。
根据摄动理论,可将i λ、i x 按小参数ε展开成幂级数(因此,胡海昌院士称其为小参数法),即 )(32210ελεελλλO +++=i i i i(6))(32210εεεO +++=i i i i x x x x(7)现在来确定1i λ,2i λ,1i x ,2i x ,为此,将(6)、(7)式代入(4)式得))()(())((2210102210221010i i i i i i i i i x x x M Mx x x K K εεελεελλεεε+++++=+++展开上式,略去)(3εO ,并比较ε的同次幂系数可得 000000:i i i x M x K λε=(8-1) 00101010001101:i i i i i i i i x M x M x M x K x K λλλε++=+(8-2)00201110111020011202:i i i i i i i i i i i i x M x M x M x M x M x K x K λλλλλε++++=+ (8-3)将(6)、(7)式代入(5)式得ij j j j Ti i i x x x M M x x x δεεεεε=+++++))(()(2210102210展开上式,并令j i =(从后面的分析可得,j i ≠的关系式在推导中没有被直接利用),比较ε的同次幂系数可得 1:0000=i Ti x M x ε(9-1) 0:010*******=++i Ti i Ti i Ti x M x x M x x M x ε(9-2)0:0021010111102002=++++i Ti i Ti i Ti i Ti i Ti x M x x M x x M x x M x x M x ε(9-3)至此,我们已推得了进行摄动分析(即求解i λ,i x 中的1i λ,2i λ,1i x ,2i x )所需的全部基本方程。
实际上,(8-1)、(9-1)即为(1)、(2)式,是显然满足的。
于是,可在原系统的特征值问题的基础上,通过(8-2)、(9-2)求解一阶摄动1i λ,1i x ,通过(8-3)、(9-3)求解二阶摄动2i λ,2i x ,代回(6)、(7)式,即求得i λ,i x ,且具有)(3εO 精度。
二、一阶摄动公式展开定理指出:任何非零向量均可表示成n 个线性无关向量的线性组合。
于是,可将1i x 表示成原系统模态(向量)02010,,,n x x x 的线性组合,即∑==nk k k i x x 1011α(10)其中,1k α是n 个待定系数。
将(10)代入(8-2),并左乘Tk x 0,得00010100101001010100i Tk i i T k i nk k k T k i i T k n k k k T k x M x x M x x Mx x K x x K x λλαλα++=+∑∑==利用正交规范关系(2)式,上式可简化成000101000101001i Tk i i Tk i i k i Tk k k x M x x M x x K x λλλαλα++=+(11)k i = 时,00i k λλ=,1000=i T k x M x ,由(11)式可得特征值的一阶摄动为010101)(i i Ti i x M K x λλ-=(12)k i ≠时,0000=i Tk x M x ,则由(11)式可得)()(00010101k i x M K x k i i i Tk k ≠--=λλλα (13)至此,n 个待定系数1k α中,只有1i α尚未确定,现在来求1i α。
用00M x Ti 左乘(10)式两边,得110001100i nk k Ti k i T i x M x x M x αα==∑=(14)(14)式转置,并考虑到0M 对称,且1i α是一个常数,于是得1001i i Ti x M x α=(15)(14)、(15)式代入(9-2)可得010121i Ti i x M x -=α(16)由(13)、(16)两式即完全确定了)~1(1n k k =α,也就确定了(10)式的1i x ,而1i λ由(12)式给出,于是可得一阶摄动公式为⎪⎩⎪⎨⎧-⎥⎦⎤⎢⎣⎡--=-=∑≠=0010,100001010110101)(21)()(i i Ti ni k k k i i i T k i i i T i i x x M x x x M K x x x M K x λλλλλ (17)三、二阶摄动公式为了得到更精确的摄动解,需要用到二阶摄动。
根据展开定理,将2i x 按02010,,,n x x x 展开∑==nk k k i x x 1022α(18)将(18)式代入(8-3),并左乘Tk x 0,得 0002011101110010200011010200)(i Tk i i i i i i i Tk nk k k Tk i i Tk nk k k Tk x M x x M x M x M x x M x x K x x K xλλλλαλα++++=+∑∑==利用(2)式,上式可简化成00201110111000211002)(i T k i i i i i i i T k i k i Tk k k x M x x M x M x M x x K x λλλλλαλα++++=+ (19)k i = 时,00i k λλ=,1000=i Tk x M x ,由(19)式可得特征值的二阶摄动为)(0111011101102i i i i i i i Ti i x M x M x M x K x λλλλ---=(20)k i ≠时,0000=i Tk x M x ,则由(19)式可得)()(000111011101102k i x M x M x M x K x k i i i i i i i i Tk k ≠----=λλλλλα (21)现在来确定最后一个系数2i α,为此,用00M x Ti 左乘(18)式两边,得2102200i nk k k T i i T i x Mx x M x αα==∑=(22)(22)式转置后,注意到0M 对称,2i α是一个数,可得2002i i Ti x M x α=(23)(22)、(23)式代入(9-3)可得)(210111011102i Ti i Ti i Ti i x M x x M x x M x ++-=α(24)于是就得到了二阶摄动公式⎪⎪⎪⎩⎪⎪⎪⎨⎧++-⎥⎦⎤⎢⎣⎡----=---=∑≠=0011101110,100001110111011020111011101102)(21)()(i i Ti i T i i T i ni k k k i i i i i i i i T k i i i i i i i i T i i x x M x x M x x M x x x M x M x M x K x x x M x M x M x K x λλλλλλλλλ(25)(17)、(25)式代入(6)、(7)式即得到摄动系统得近似解。
三阶及三阶以上摄动公式的推导过程完全类似以上过程,在此从略。