计算机控制系统数学描述资料
- 格式:ppt
- 大小:1.22 MB
- 文档页数:60

第二章自动控制系统的数学模型教学目的:(1)建立动态模拟的概念,能编写系统的微分方程。
(2)掌握传递函数的概念及求法。
(3)通过本课学习掌握电路或系统动态结构图的求法,并能应用各环节的传递函数,求系统的动态结构图。
(4)通过本课学习掌握电路或自动控制系统动态结构图的求法,并对系统结构图进行变换。
(5)掌握信号流图的概念,会用梅逊公式求系统闭环传递函数。
(6)通过本次课学习,使学生加深对以前所学的知识的理解,培养学生分析问题的能力教学要求:(1)正确理解数学模型的特点;(2)了解动态微分方程建立的一般步骤和方法;(3)牢固掌握传递函数的定义和性质,掌握典型环节及传递函数;(4)掌握系统结构图的建立、等效变换及其系统开环、闭环传递函数的求取,并对重要的传递函数如:控制输入下的闭环传递函数、扰动输入下的闭环传递函数、误差传递函数,能够熟练的掌握;(5)掌握运用梅逊公式求闭环传递函数的方法;(6)掌握结构图和信号流图的定义和组成方法,熟练掌握等效变换代数法则,简化图形结构,掌握从其它不同形式的数学模型求取系统传递函数的方法。
教学重点:有源网络和无源网络微分方程的编写;有源网络和无源网络求传递函数;传递函数的概念及求法;由各环节的传递函数,求系统的动态结构图;由各环节的传递函数对系统的动态结构图进行变换;梅逊增益公式的应用。
教学难点:举典型例题说明微分方程建立的方法;求高阶系统响应;求复杂系统的动态结构图;对复杂系统的动态结构图进行变换;求第K条前向通道特记式。
的余子式k教学方法:讲授本章学时:10学时主要内容:2.0 引言2.1 动态微分方程的建立2.2 线性系统的传递函数2.3 典型环节及其传递函数2.4系统的结构图2.5 信号流图及梅逊公式2.0引言:什么是数学模型?为什么要建立系统的数学模型?1. 系统的数学模型:描述系统输入输出变量以及各变量之间关系的数学表达式。
1) 动态模型:描述系统处于暂态过程中个变量之间关系的表达式,他一般是时间函数。
第一章概论,讲述计算机控制系统的发展过程;计算机控制系统在日常生活和科学研究中的意义;计算机控制系统的组成及工作原理;计算机控制的特点、优点和问题;与模拟控制系统的不同之处;计算机控制系统的设计与实现问题以及计算机控制系统的性能指标。
1.计算机控制系统与连续模拟系统类似,主要的差别是用计算机系统取代了模拟控制器。
2.计算机系统主要包括:.A/D转换器,将连续模拟信号转换为断续的数字二进制信号,送入计算机;.D/A转换器,将计算机产生的数字指令信号转换为连续模拟信号(直流电压)并送给直流电机的放大部件;.数字计算机(包括硬件及相应软件),实现信号的转换处理以及工作状态的逻辑管理,按给定的算法程序产生相应的控制指令。
3.计算机控制系统的控制过程可以归结为:.实时数据采集,即A/D变换器对反馈信号及指令信号的瞬时值进行检测和输入;.实时决策,即计算机按给定算法,依采集的信息进行控制行为的决策,生成控制指令;.实时控制,即D/A变换器根据决策结果,适时地向被控对象输出控制信号。
4.计算机控制系统就是利用计算机来实现生产过程自动控制的系统。
5.自动控制,是在没有人直接参与的情况下,通过控制器使生产过程自动地按照预定的规律运行。
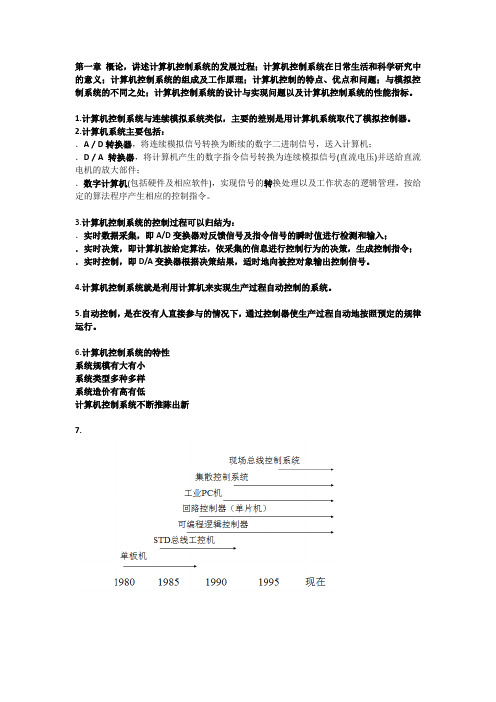
6.计算机控制系统的特性系统规模有大有小系统类型多种多样系统造价有高有低计算机控制系统不断推陈出新7.按功能分类1)数据处理系统2)直接数字控制(DDC)3)监督控制(SCC)4)分散型控制5)现场总线控制系统按控制规律分类1)程序和顺序控制2)比例积分微分控制(PID)3)有限拍控制4)复杂控制5)智能控制按控制方式分类1)开环控制2)闭环控制9.计算机控制系统的结构和组成控制算法软件网络硬件11.硬件平台运算处理与存储部分:CPU,存储器(RAM,ROM,EPROM,FLASH-ROM,EEPROM以及磁盘等),时钟,中断,译码,总线驱动等。
输入输出接口部分:各种信号(模拟量,开关量,脉冲量等)的锁存、转换、滤波,调理和接线,以及串行通讯等。

一、多选题1、系统暂态主能指标包括()A.调节时间B.上升时间C.阻尼比D.峰值时间正确答案:A、B、D2、减小或消除系统的稳态误差方法有()A.采用串级控制抑制内回路扰动。
B.在系统的前向通道或主反馈通道设置串联积分环节。
C.增大系统开环增益或扰动作用点之前系统的前向通道增益。
D.采用反馈补偿法。
正确答案:A、B、C3、系统常规的性能指标有()A.稳定性指标B.暂态指标C.系统的抗干扰指标D.稳态指标正确答案:A、B、C、D4、判断连续系统稳定的频率域方法有()A.劳斯判据B.根轨迹方法C.奈奎斯特判据D.波特图法正确答案:C、D二、判断题1、稳态误差与系统的结构和参考输入无关。
()正确答案:×2、一个系统稳定是指该系统在平衡状态下,受到外部扰动作用而偏离平衡状态,当扰动消失后,经过一段时间,系统不能够回到原来的平衡状态。
()正确答案:×3、线性系统的稳定性是由系统本身固有的特性决定的,而与系统外部输入信号的有无和强弱有关。
()正确答案:×三、填空题1、系统的类型的作用:系统的类型数将决定系统有无_______。
正确答案:稳态误差2、已知闭环系统的特征方程45z3−117z2+119z−39=0,该系统_______。
(不稳定/稳定)正确答案:不稳定3、_______指系统过渡过程结束到达稳态以后,系统参考输入与系统输出之间的偏差。
正确答案:稳态误差4、已知闭环系统的特征方程z3−1.001z2+0.3356z+0.00535=0,该系统_______。
(不稳定/稳定)正确答案:稳定。

计算机控制系统席爱民编著第1章绪论1.1 概述可以这样说,没有计算机的参与,现代化的自动化系统是不可能实现的。
随着微电子学、计算机技术革命性的发展,当今所构成的自动控制系统都是建立在计算机基础之上的。
要获得比模拟控制系统更好的控制性能,使控制系统具备新的功能,只有使用计算机控制系统。
计算机具有信息储存记忆、逻辑判断推理和快速数值计算功能,是一种强大的信息处理工具,其应用己经渗透到人类活动的各个领域,强有力地推动着技术与科学的全面进步。
随着计算机技术的迅猛发展,计算机在工业控制中的应用也越来越广泛。
如今计算机控制已广泛应用于各行各业技术工程和各类工业生产制造过程的控制中。
学习本书的目的:本书将侧重系统讲述有关计算机控制系统的分析及设计的基本理论和方法,以及一些较为实用的计算机先进控制算法。
实际上目前全部的控制系统都是基于计算机控制,因此懂得计算机控制是很重要的。
如果将计算机控制系统仅仅看作模拟控制系统的近似是很不够的。
因为那是没有看到计算机控制的全部潜在能力。
很好地掌握计算机控制系统,就能够充分发挥计算机控制的全部潜能。
计算机控制系统存在着一些模拟控制系统所没有的相应现象,本书的主要目标就提供了解、分析和设计计算机控制系统扎实的基础理论知识,这对于从事控制系统方面的工程技术人员来说是很重要的。
本章概述:计算机控制系统的组成、类型、特点、任务以及计算机控制的发展概况及趋势;了解过程自动化的任务,进一步明确计算机控制系统的类型、特点。
1.1.1计算机控制系统典型计算机反馈控制系统如图1.1所示。
系统中存在着两种截然不同的信号,即模拟连续信号及数字离散信号。
因而对于计算机控制系统的分析和设计就不能完全采用连续控制理论,需要有相应的离散控制理论与之相适应。
不同类型信号混合的分析有时是困难的,然而,在大多数的情况下,描述系统在采样点上的表现就足够了。
1.1.2计算机控制系统组成计算机控制系统是由硬件和软件两部分组成的。

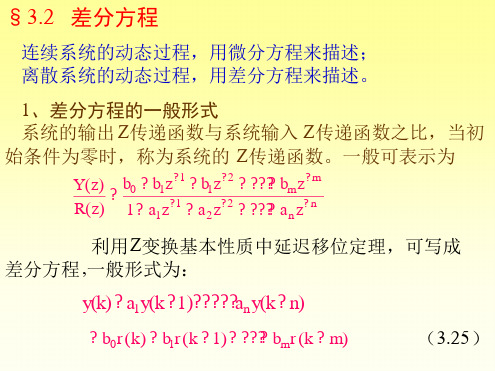
控制系统数学模型
控制系统数学模型是指用数学方法对控制系统进行建模和分析
的过程。
控制系统是指对一些物理过程进行控制的系统,包括机电控制系统、化工控制系统、航空航天控制系统等。
数学模型是指对一个系统或过程进行描述的数学式子或方程组。
建立控制系统的数学模型是控制工程的重要基础之一。
通过建立数学模型,可以更加深入地理解系统的特性,优化控制策略,提高系统的效率和稳定性。
在建立控制系统数学模型时,需要先对被控系统进行分析,确定系统的物理特性和运动规律。
然后,根据控制对象的特性,选择适当的数学模型进行建立。
常用的控制系统数学模型包括线性时不变系统模型、非线性系统模型、时变系统模型等。
线性时不变系统模型是指系统的输出与输入之间满足线性关系,且系统的特性不随时间变化。
非线性系统模型是指系统的输出与输入之间不满足线性关系。
时变系统模型是指系统的特性随时间变化。
除了建立数学模型外,还需要对模型进行分析和仿真。
常用的分析方法包括传递函数法、状态空间法等。
仿真可以通过计算机模拟系统运动过程,验证控制策略的有效性。
总之,控制系统数学模型是控制工程的重要基础之一,对于提高控制系统的性能和稳定性具有重要意义。
- 1 -。