路面对汽车激励的时域模型建立及计算机仿真
- 格式:pdf
- 大小:570.79 KB
- 文档页数:7

毕业论文说明书路面激励载荷时频域分析研究1 引言1.1 本课题研究的背景及意义随着经济的发展,高等级公路里程的增加,长途客流已成为我国公路运输的主要特征,长距离、长时间的驾驶作业已是平常。
这样使得隔振装置在汽车上发挥着越来越重要的作用,如轮胎、弹簧钢板、减振器、座椅、气囊等等。
这些装置缓和了路面不平传给人体的冲击,衰减了由此引起的振动,给驾驶员和乘员提供了舒适、安全的乘座条件及工作条件,车辆运输路面激励载荷的分析对隔振装置的设计起着关键性的作用。
此外,一些产品在运输过程中,由于包装不当而遭到破坏,这方面的损失是很大的。
产品在运输过程中遭到破坏的主要原因是包装方法、包装材料及包装结构不合理所致,其根本原因就是包装缺乏科学性。
车辆运输路面激励载荷的分析举证了包装产品在振动与冲击作用下的动力学规律。
同时,有助于商家在减振包装的设计方法与设计步骤中做到最好。
本文以汽车运输过程中路面的激励数据为对象,进行随机路面振动激励载荷特性的时频域分析和研究。
实际生活中路面对车辆的激励载荷在垂直、前进、左右三个方向上都存在,由于三个方向上激励载荷的相关性不是很大,且垂直方向上的激励载荷影响最为明显,故我们仅对这一方向上的数据进行分析。
1.2 振动信号的研究及现状车辆在行驶状态下的振动信号是不平稳的,用Fourier分析法和通常的时域分析方法是不能反映出车辆振动的本质特征的,这样也就是车辆的减震降噪相对变得困难。
因为非平稳动态信号的统计特性与时间有关,对非平稳信号的处理需进行时频分析,希望得到时域和频域中非平稳信号的全貌和局化结果[1]。
非平稳振动信号的处理方法中有短时傅立叶分析、Winger-vile分析、小波分析、Hilbert-huang变换和神经网络技术[6]。
短时傅立叶变换(STFT)[15]:通过一个窗口观察信号,将整个信号转化为若干个局部“平稳”的信号,再进而施行傅立叶变换,从而将一维信号映射为时间一频率面内的二维函数。
第11卷 第3期1998年7月中 国 公 路 学 报China Journal of Highway and T ransportVol.11 N o.3July1998路面对汽车激励的时域模型建立及计算机仿真*檀润华[河北工业大学计算中心,天津,300130] 陈 鹰[浙江大学]路甬祥[中国科学院]摘 要:应用已有幂函数功率谱的数据确定了有理函数功率谱的参数,建立了一般路面及离散事件对汽车单点及单轮辙激励的时域模型,并对该模型进行了仿真。
关键词:汽车,路面激励,数学模型,仿真中图分类号:U461The Mathematical Models in Time Domain forthe Road Disterbances and the SimulationTa n Runhua¹ Chen Ying Lu Yongxiang[¹Computat ional Cent re,Hebei U niver sity of Technology,Tianjin,300130]Abstr act:T he power spectr al densities which existed in the form of power law are used to deter mine the parameters of the power spectral densities in the r ational form.T he mathe-matical models in the time domain for the r oad disturbances which include random road disturbances and discrete event road disturbances are developed.The computer simulation for the models is also carried out.Key wor ds:Vehicle,Road disturbances,Mathematical models,Computer simulation汽车运行时,不平路面度激励使其产生振动。

不同路面激励下某微型客车NVH特性分析的开题报
告
一、研究背景和意义
随着社会和经济的发展,汽车已经成为现代社会中不可或缺的一部分。
随着人们对乘车舒适性和安全性的要求越来越高,降低汽车的噪音、振动和刺激性(NVH)已成为汽车工程师必须要面对的挑战。
车辆通过不同路面时,会产生不同的激励,对汽车的NVH特性也会产生影响。
因此,对于汽车在不同路面激励下的NVH特性研究,具有重要的研究意义。
二、主要研究内容
本文的研究内容主要为汽车在不同路面激励下的NVH特性分析。
具体包括以下几个方面:
1.列表法计算路径,并选择适当的路面混响模型;
2.通过模态及有限元方法模拟实车在不同路面激励下的噪音、振动
等NVH信号;
3.通过频响函数、功率谱密度等手段进行信号分析;
4.对不同路面激励下的NVH信号进行对比分析。
三、研究方法
1.建立NVH仿真模型,包括有限元、模态振动等;
2.进行单因素方法的试验设计,并通过试验,获取实测数据;
3.对实测数据进行滤波、功率谱密度等信号分析;
4.对信号进行处理及对比分析。
四、预期研究成果
1.得到汽车在不同路面激励下的NVH分析结果;
2.总结分析各种激励下NVH信号的规律性和特点,并作出分析结论;
3.掌握NVH测试方法和分析技术,能够在实验室和现场进行NVH测试,并对NVH测试结果进行分析和解读。
五、研究计划
1.秋季学期:查阅相关文献,建立NVH仿真模型;
2.冬季学期:进行试验并获取数据,对数据进行预处理;
3.春季学期:对数据进行分析及对比,撰写学位论文;
4.夏季学期:修改完善论文,准备授课及答辩。

编号毕业设计(论文)题目路面随机激励下的汽车振动仿真目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 振动的危害 (1)1.2 振动研究的问题 (1)1.3 研究机械振动的基本方法 (2)1.4 汽车振动问题 (3)1.5 振动分析有限单元方法 (3)1.6 Simulink简介 (4)2 路面随机激励模型 (5)2.1 基本概念 (5)2.2 路面随机激励时域模型 (5)2.3 白噪声法建立路面数学模型 (5)2.4 用matlab/simulink进行仿真 (7)3 建立整车4自由度模型 (9)3.1 汽车振动模型 (9)3.2 系统运动微分方程的建立 (11)4建立matlab/simulink仿真模型 (13)4.1 建立动态系统模型的要素 (13)4.2 动态系统建模概述 (13)4.3 建立汽车振动系统仿真模型 (14)5振动仿真分析 (15)5.1 simulink动态系统仿真过程 (15)5.2 选取汽车模型参数 (16)5.3 仿真分析 (16)5.4 研究悬架刚度的影响 (19)6结论 (25)致谢 (26)参考文献 (26)摘要当今社会,汽车在人们的日常生活中占据着越来越重要的作用,人们对于汽车也提出了越来越高的要求。
进入新世纪以来,汽车技术取得了巨大的发展,汽车各方面的性能也取得了巨大的进步。
人们对于汽车的研究越来越全面,对于汽车振动的研究已经成为了汽车研究中重要的课题之一。
然而,由于汽车是一个包含惯性、弹性、阻尼等动力学特征的非线性系统,零件多,受力复杂,而且构成汽车的各子系统之间存在相互耦合作用,使得汽车的动态特性非常复杂。
要想真实描绘汽车的动态特性,必须考虑尽可能多的零件运动来获得精确的数学模型,而太复杂的模型又给求解带来了巨大的困难,甚至得不到结果。
因此,本文以整车4自由度为对象,通过仿真技术的运用,来研究在路面随机激励下汽车的振动特性,研究结果可以对汽车平顺性研究提供参考。
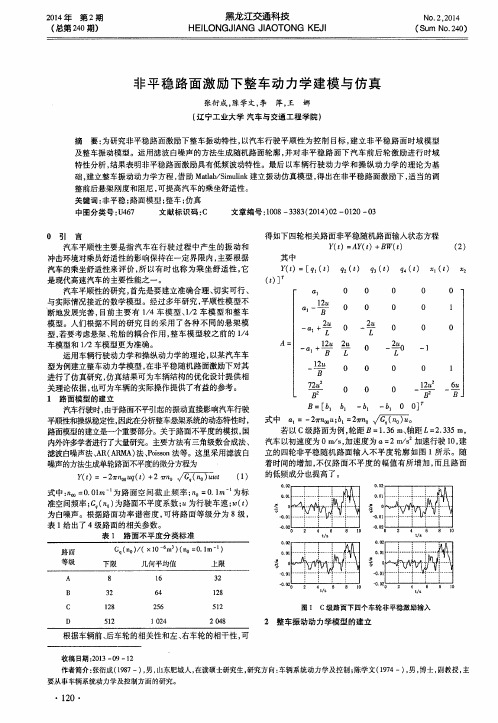
路面不平度随机激励时域模型的仿真比较与评价彭 佳, 何 杰, 李旭宏, 陈一锴, 丛 颖(东南大学交通学院,江苏南京210096)摘 要:为深入研究常用路面不平度随机模型的特性,基于Matlab 仿真环境,对白噪声法、谐波叠加法、FFT 法、AR/ARMA 法4种模型在指定环境下的效率与结果进行了仿真分析和比较。
在将4种模型拓展到多点时域模型后,对多点单轮辙模型的时延相关性、可用性和严密性以及多点双轮辙模型的轮辙相关性、合理性和波动性进行了仿真分析和比较。
结合模型适用范围与扩展应用等方面的比较,给出了4种模型应用特性的综合评价结果。
完善了多点时域模型的建模方法和体系,得到的评价结果,为车辆优化和设计、路面不平度和谱分析、道路数据库建立以及人车路大系统分析等方向的科研工作者选择模型提供了理论依据。
关键词:路面不平度;随机过程;时域模型;多点多轮辙激励;数值仿真中图分类号:P732文献标识码:A文章编号:1009-3443(2009)01-0077-06Simula tion compa rison a nd eva lua tion of common time domainmodels unde r roa d irre gularity e xcitationP EN G J ia , H E J ie , LI Xu -hong , CH EN Yi -ka i , CON G Ying(Tr anspor tat ion College ,Southeast University ,Nanjing 210096,China )Abstra ct :To study the characteristics of common time domain models of road irregularity excitation ,four types of single-point time domain models of road irr egularity excitation,namely white noise filtering,har-mony superposition,FFT and AR/ARMA method were analyzed.T he efficiency and simulation results of these four methods in MAT LAB environment were analyzed and compared.All these models wer e devel-oped and applied to the multi -point time domain model in or der to investigate the time -delay corr elation ,availability and tightness of the unilateral-track model,as well as the track correlation,rationality and fluctuation of the bilateral-track model.A comprehensive evaluation conclusion was drawn refer ring to the application scope and patulous research of these models ,which perfected the modeling system of the multi -point time domain model .The evaluation conclusion provides theoretical basis of model selection for vehi-cle design,r oad irregularity analysis and spectrum analysis,Road Basic Database Construction and People-Vehicle-Road Analysis.Key words :road irregularities ;stochastic process ;time domain model ;bilateral track excitation ;numeri-cal simulation 收稿日期:2007-12-01.基金项目:国家自然科学基金资助项目(50708020);江苏省自然科学基金资助项目(BK2007566).作者简介:彭 佳(1983-),男,博士生.联系人:何 杰,副教授;研究方向:载运工具运用工程;E -mail:hejie@s . 作为车辆行驶舒适度的关键性指标,国内外针对汽车平顺性的研究在近些年得到了长足的发展。
第11卷 第3期1998年7月中 国 公 路 学 报China Journal of Hig hw ay and T ransportVol.11 N o.3July1998路面对汽车激励的时域模型建立及计算机仿真*檀润华[河北工业大学计算中心,天津,300130] 陈 鹰[浙江大学]路甬祥[中国科学院]摘 要:应用已有幂函数功率谱的数据确定了有理函数功率谱的参数,建立了一般路面及离散事件对汽车单点及单轮辙激励的时域模型,并对该模型进行了仿真。
关键词:汽车,路面激励,数学模型,仿真中图分类号:U461The Mathematical Models in Time Domain forthe Road Disterbances and the SimulationTan Runhua Chen Ying L u Yongx iang[ Co mputat ional Cent re,Hebei U niver sity of T echnolog y,T ianjin,300130]Abstract:T he pow er spectr al densities which ex isted in the form of pow er law are used to deter mine the parameters of the pow er spectral densities in the r ational form.T he m athe-matical m odels in the tim e do main for the r oad disturbances w hich include random road disturbances and discrete event road disturbances are developed.The co mputer sim ulation fo r the mo dels is also carried out.Key words:Vehicle,Road disturbances,Mathem atical mo dels,Computer simulatio n汽车运行时,不平路面度激励使其产生振动。
按汽车不同简化模型的需要,将激励分为单点、单轮辙及双轮辙激励[1]。
按路面不平度类型将激励分为随机激励及离散事件激励(dis-crete event road distur bances)[2],前者是由一般路面的随机不平产生的,后者由圆形凸起、弓形凸起及波形路面等离散事件引起的。
当考虑非线性因素时,如减振器速度特性的非线性,则汽车动力学系统是非线性的,而时域仿真是其分析及设计的基本方法之一;当研究汽车动力学系统的控制,如悬架的主动、半主动控制[3,4]等,也要用到时域仿真。
为了进行时域收稿日期:1997-09-10*浙江大学流体传动及控制国家重点实验室开放基金资助项目檀润华,男,1958年12月出生,博士,教授仿真,首先要建立路面激励的时域模型。
路面离散事件激励可用在空间坐标系下的确定性函数描述[2,5],这些函数可以转变成时间的函数。
一般路面的随机激励为一随机过程,常用按幂函数或有理函数构造的功率谱描述[6]。
前一类功率谱早在70年代已进行了大量的研究[7~10]。
在中国,该类谱已用于汽车动力学系统的频域分析与设计之中[11~14]。
第二类功率谱也是70年代提出的[15],近年来最优控制、特别是鲁棒控制用于汽车动力学系统的分析及设计使这种功率谱得到了应用[16~18]。
1983年Cebo n 及New land[19]提出了一种基于第一类功率谱的FFT 反变换路面随机激励时域仿真算法,后来的一些研究,如文献[20],认为该方法并不可靠。
1994年Oueslati 及Sanker 提出了一种基于第二类路面功率谱的路面随机激励时域模型[17],该文献给出了一种单轮辙随机激励的特例模型,但没有研究该模型的仿真。
笔者首先根据已给定的第一类功率谱[12]估计第二类功率谱函数中的参数,然后建立不平路面随机激励及离散事件激励所构成的单点及单轮辙激励时域模型,最后讨论其仿真中的问题。
1 有理函数功率谱参数估计不平路面度功率谱的有理函数形式之一为[16]( )=22 ( 2+ 2)(1)式中: 为常数(1/m); 为常数(m ); 为空间频率(c/m )。
文献[16]中仅给出了沥青、水泥及粗糙路面的 、 数值,而未给出通用的将路面分为五级的数值。
1978年,Robson 等人提出了路面不平度功率谱的一种幂函数公式[10],该式可转变成如下形式S ( )=C sp -210≤ ≤ 1C sp -21≤ ≤ 20≥ 2(2)式中:C sp 为路面不平度系数(m 2/c/m ); 1为空间频率下限(值为0.1c/m ); 2为空间频率上限(值为2c/m )。
文献[12]中不仅给出了式(2)所示的功率谱函数,且给出了五种路面(A 、B 、C 、D 、E )的C sp 数据。
式(1)中的 及 是常数,式(2)中的C sp 由实验测得,而两式描述的是同一随机过程,因此,式(1)中的常数可由给定的式(2)通过非线性参数估计的方法确定[21]。
其模型为J =∑mi =1[ ( i, , )-S ( i )]2→m in≥c 1 ≥c 2(3)式中:c 1、c 2为常数;m 为所取空间频率 的个数。
公式(3)构成一典型的非线性约束最优化问题,一些通用软件可用于该问题的求解。
优97第3期 檀润华等:路面对汽车激励的时域模型建立及计算机仿真 化结果列于附表中。
图1是应用优化参数后,对于A 、B 、C 三种路面的两个公式进行仿真的曲线。
附表 参数估计值路面级别C sp (×10-7m 2/c/m)(1/m) (m )A 10.1320.0015B 40.13030.0032C 160.120.0060D 640.10070.0115E2650.090.0220 图1 两种谱函数的比较(A 、B 、C ) 国标所给功率谱函数[22]形式与式(2)不同,但只要用这些函数代替式(2),并按同一过程即可估计出 及 。
2 路面激励时域模型的建立设左右轮辙的不平度相同,汽车对称于其纵轴线,则汽车运行时,车身仅存在垂直振动及俯仰振动。
又设后面的车轮行驶在前轮的轮辙上。
图2为在这种假定下的1/2车物理模型,图中:V 为汽车的运行速度(m /s);z i (i =1,2,…,n )为路面对汽车的激励(m);x 1i (i =2,3,…,n )为第i 个激励点或车轮到第一个激励点或车轮间的距离(m)。
在该模型中,路面对汽车有n 个垂直激励,从而构成了一个单轮辙激励问题。
在该物理模型中,如果仅考虑路面对某一个车轮的激励,则为单点激励问题。
路面激励是由一般路面的随机激励及离散事件激励的叠加组成的[2]。
因此,可以分别讨论。
2.1 路面随机激励时域模型的建立根据文献[16]的结果,第一个车轮所受到的路面随机激励时域数学模型用下式描述:z 11(t )+ Vz 11=w (t )(4)式中:z 11为第一个车轮所受到的路面随机激励;w (t )为一白噪声,其协方差满足式(5)的关系。
E [w (t )w ( )]=Q (t - )(5)而(t - )=1t = 0t ≠98 中 国 公 路 学 报 1998年 图2 具有n 个激励的1/2车物理模型Q =2 V2(6)式中: 、 由附表给定的值确定。
文献[17]已给出Z 1i (s )Z 11(s )≈2- i s2+ i s (i=2,3,…,n )(7)式中:s 为Laplace 算子;Z 1i (s )及Z 11(s )分别为z 1i (t )、z 11(t )的Laplace 变换;z 1i 为第i 个车轮所受路面的随机激励; i 为时间延迟,由式(8)决定。
i =x 1iV (i =2,3,…,n )(8)由式(7)及式(4)得z1i (t )=-2iz 1i (t )+2i +V z 11(t )-w (t ) (i =2,3,…,n )(9) 式(4)、(9)可写成如下状态方程的形式Z1(t )=AZ 1(t )+B w (t )(10)式中:Z ・1(t )=[z ・11(t ),z ・12(t ),…,z ・1n (t )]TA =- V 0……0 V +2/ 2-2/ 20…0…………V +2/ n0……-2/ nB =[1,-1,…,-1]T式(4)及(10)所示的随机微分方程即为要求的路面单点随机激励及单车辙随机激励时域数学模型。
图3 弓形路面2.2 离散事件激励的时域模型离散事件可抽象为几类,半圆形凸起(凹陷)、弓形路面、波形路面等都是其典型实例。
路面破损、路面上如石块一类的障碍物、路面接缝等为半圆形凸起的例子,拱桥及弓形地形造成弓形路面,而由于施工质量欠佳可能造成波形路面。
离散事件激励的时域模型可用确定性函数描述,现以图3所示弓形路面在空间坐标系下的物理模型来说明。
图中:x 22为汽车起点到弓形路面的距离(m );x 1b 为弓形路面的长度(m );h 2为弓形路面最高点的高度(m )。
其数学模型为99第3期 檀润华等:路面对汽车激励的时域模型建立及计算机仿真 z 22=-h 22co s 2 (t -x 22V )V x lb +h 22x 22V ≤t ≤x 22+x lbVx 22V >t ,t >x 22+x lbV(11) 式(11)为单点激励模型,如将这些公式中的时间变量t 用t - i (i =2,…,n ),则将它们转变成单轮辙激励模型。
3 路面激励时域数学模型的仿真路面激励是由路面不平度随机激励及路面离散事件激励的叠加产生的[2],后者的数学模型是确定的时间函数,用软件进行仿真比较容易实现,前者仿真的关键问题之一是式(4)中白噪声的产生,一些仿真软件中已给出了白噪声的标准函数,如M AT LA B/SIM ULINK 软件中就给出了这种函数。
本文所编制专用仿真软件是基于M ATLAB /SIMU LINK 环境的。
在该软件中,路面对汽车有5个激励点,即有5个输出,分别表示激励点处的位移z 11至z 15。
图4至6分别为A 、B 、C 三种路面随机激励的仿真曲线,V =20m /s 。
为了清晰,图中仅输出z 11及z 15,图中实线为z 11,虚线为z 15,并取x 15为5(m )。
由图可以看出,z 15与z 11的变化波形基本相同,只是比z 11滞后;还可以看出,三种路面随机激励位移z 1变化的范围分别为A : z 1 <0.005(m )B : z 1 <0.01(m )C : z 1 <0.02(m)该范围与文献[23]中三种路面的实测结果基本吻合。