浅析应用光学中的传递矩阵
- 格式:pdf
- 大小:406.87 KB
- 文档页数:6
光学传输矩阵薄膜光学
光学传输矩阵薄膜光学,作为一种前沿技术,正在为我们带来许多惊奇和便利。
它利用薄膜的特殊结构和性能,实现了光的传输和调控,为光学器件的设计和制造带来了革命性的突破。
薄膜光学的原理在于利用薄膜的厚度、折射率和衍射等特性来控制光的传输和干涉效应。
通过精确控制薄膜的结构和性能,可以实现对光的反射、透射和吸收等特性的调控,从而实现对光的精确控制和处理。
光学传输矩阵薄膜光学的应用非常广泛。
例如,在光学器件领域,它可以用于制造高效的反射镜、透射镜和光学滤波器等。
通过合理设计薄膜的结构和厚度,可以实现对特定波长光的选择性反射或透射,从而实现对光的精确控制和处理,提高光学器件的性能和效率。
光学传输矩阵薄膜光学还可以应用于光学通信领域。
光学通信是一种高速、大容量的通信方式,而薄膜光学的特殊性能可以帮助实现光信号的传输和调控。
通过合理设计薄膜的结构和参数,可以实现对光信号的调制、增强和解复用,从而提高光通信系统的性能和可靠性。
除此之外,在光学传感、光学显像和光学计算等领域,光学传输矩阵薄膜光学也有着广泛的应用。
通过利用薄膜的特殊性能,可以实现对光的精确控制和处理,从而实现对光学信号的传感、显像和计
算等功能,为各种领域的应用提供了强大的支持和便利。
光学传输矩阵薄膜光学作为一种前沿技术,正在为我们带来许多惊奇和便利。
它利用薄膜的特殊结构和性能,实现了对光的精确控制和处理,为光学器件的设计和制造带来了革命性的突破。
随着技术的不断进步和应用的不断扩展,相信光学传输矩阵薄膜光学将会在各个领域发挥越来越重要的作用,为人类的生活和科技进步带来更多的惊喜和便利。
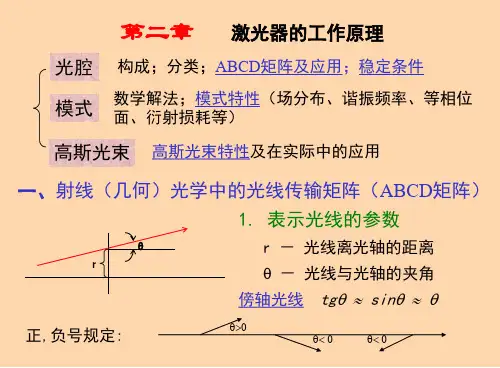
几何光学中的矩阵方法几何光学是基于几何学研究光学的基本方法。
几何光学,尤其是矩阵方法在研究光学系统成像时有着巨大的优势。
本文通过论述矩阵方法在几何光学中的应用,介绍描述傍轴光线成像的光学ABCD矩阵。
同时进一步将矩阵方法拓展至非傍轴光线,得到描述任意光线成像的严格ABCD矩阵。
在光学研究中,当光波长远小于研究对象的尺寸时,通常会利用几何光学方法来研究光线的传播。
几何光学中光线的传播遵循三个基本定律:1. 光在自由空间中沿直线独立传播;2. 光的折射定律;3. 光的反射定律。
虽然几何光学忽略了光的波动性,无法解释干涉、衍射等物理现象,但是其在光学系统成像性质的研究中有着巨大的优势。
光学系统成像的核心是光学系统变换。
1840年C. Gauss建立了高斯光学,用来研究理想光学系统傍轴成像(即满足傍轴近似的光线的成像)性质。
傍轴近似下,光线与光学系统中心轴的夹角很小,可以使用小角近似关系,。
在这种近似下,光学系统变换退化为线性变换,因此可以用矩阵方法来进行描述。
矩阵方法最初是由R. A. Sampson引入几何光学,用来处理几何像差等问题错误!未找到引用源。
之后矩阵方法拓展至研究非傍轴成像,为非傍轴成像的研究提供了新的方法。
本文分为两部分,第一部分着重于傍轴近似下的矩阵方法,介绍ABCD矩阵对光学系统变换的描述。
第二部分拓展至包括非傍轴光线的任意光线的传播,介绍并推导严格ABCD矩阵。
一傍轴光线成像与矩阵上述结论基于傍轴近似,研究的是理想光学系统的傍轴成像。
然而实际成像系统中,非傍轴光线成像造成的影响往往是不可忽略的。
非傍轴光线与傍轴光线往往不是成像于同一点,即非傍轴光线与傍轴光线成像之间存在差异,称之为几何像差。
实际成像中,我们需要关注成像质量,即需要去衡量几何像差的大小。
这种情况下,傍轴ABCD矩阵是无法解决的。
我们需要引入可以描述非傍轴光线的ABCD矩阵,即严格ABCD矩阵。
二任意光线成像与严格ABCD矩阵对于任意光线的成像,我们希望同样能够用矩阵进行描述,同时能够保持与傍轴ABCD矩阵相似的形式。
导波光学中的转移矩阵方法
导波光学中的转移矩阵方法是一种计算光线传输的数学方法。
在光导波器的分析和设计中经常使用该方法。
该方法基于Maxwell方程,利用矩阵运算的技术,通过分割光线传输区域,将光波的传输过程由一系列的矩阵表示,进而计算光线在不同介质中的传输情况。
转移矩阵方法的基本思想是将光路分为多个介质,对每个介质都可以根据不同物理特性和光路形状建立对应的矩阵。
通过矩阵运算,可以将光线在不同介质中的传输情况快速、准确地计算出来,包括反射、折射等现象。
该方法可以用于分析导光器中的单模光传输特性,计算光耦合问题,优化光学器件结构等。
总之,转移矩阵方法是导波光学领域中的一种重要计算方法,在光器件的设计和分析中具有广泛的应用。
光学矩阵法光学矩阵法是一种应用于光学系统设计的数学方法。
它通过将光学系统中的各种光学元件和光学效应用矩阵的形式表示,从而对整个光学系统进行描述和分析。
这种方法可以使光学系统的设计更加灵活和高效。
在光学矩阵法中,光学元件被表示为一个矩阵,矩阵的每一行代表一个光学元件,而矩阵的每一列代表一个光学效应。
通过将这些光学元件和光学效应的矩阵相乘,可以得到整个光学系统的传输矩阵。
传输矩阵描述了光线从输入端到输出端的传输过程,可以用于分析光学系统的性能和优化设计。
光学矩阵法的一个重要应用是光学系统的布局和优化。
在光学系统设计中,我们常常需要安排各种光学元件的位置和方向,以实现特定的光学功能。
使用光学矩阵法,我们可以通过改变光学元件在矩阵中的位置和顺序来调整光学系统的布局,从而达到最佳的光学性能。
另一个重要的应用是光学系统的性能分析和优化。
光学系统的性能往往与光学元件的参数密切相关。
通过将光学元件的参数表示为矩阵的元素,我们可以通过对矩阵的运算来分析光学系统的性能。
例如,我们可以计算光学系统的传输函数,以评估光学系统的分辨率、聚焦能力和光学畸变等性能指标。
基于这些分析结果,我们可以对光学系统的参数进行优化,以满足特定的设计要求。
光学矩阵法还可以用于光学系统的校准和校正。
在实际的光学系统中,由于光学元件的制造误差和环境因素的影响,光学系统的性能往往会发生偏差。
通过测量光学系统的传输矩阵,我们可以确定光学系统的误差和畸变,从而对光学系统进行校准和校正。
通过调整光学元件的参数,使光学系统的传输矩阵接近理想值,可以提高光学系统的性能和精度。
光学矩阵法在光学系统的设计和分析中具有重要的应用价值。
它不仅可以简化光学系统的描述和分析过程,还可以提高光学系统的设计效率和性能。
然而,光学矩阵法也有一些局限性。
例如,它只适用于线性光学系统,并且忽略了非线性效应和散射等因素的影响。
此外,光学矩阵法在处理一些复杂的光学系统时可能会遇到计算复杂度高的问题。
应用光学之近轴光的矩阵表示理想光学系统理论和光学系统近轴区的物像关系是线性的,用矩阵进行运算和表达光学系统的成像性质很方便。
在矩阵运算中,确定一条光线的空间位置用该光线和一己知参考面上交点的坐标(0, y, z)及该光线的三个方向余弦和所在空间折射率的乘积nα、nβ、n γ来表示。
对于子午面内的光线,只要用两个参量就可以了,即光线在参考面上的交点高度y及该光线和坐标轴夹角的余弦与折射率的乘积ncosV。
图1:导出光线的矩阵单元表示如图1所示。
由图1可知,ncosV=nsinU。
在近轴区内nsinU=nu表示,像空间写为n'u'。
1.折射矩阵参考面可以是折射面的近轴部分,也可以是物、像面或任一指定平面。
光线通过参考面之后,其参量发生变化,这种变化可以用一个矩阵来描述。
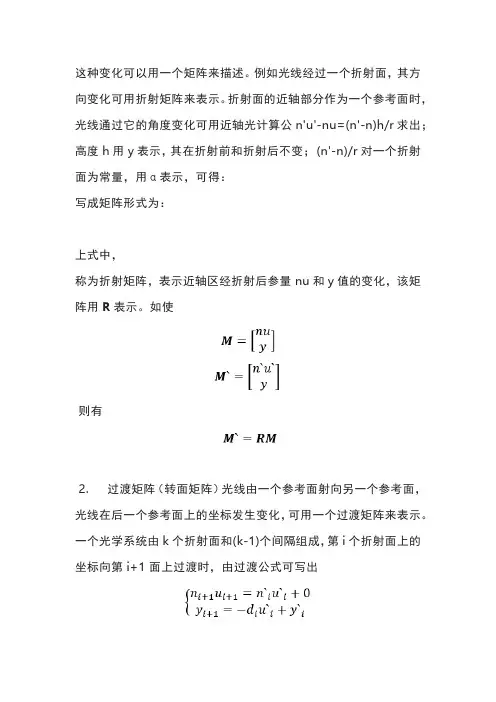
例如光线经过一个折射面,其方向变化可用折射矩阵来表示。
折射面的近轴部分作为一个参考面时,光线通过它的角度变化可用近轴光计算公n'u'-nu=(n'-n)h/r求出;高度h用y表示,其在折射前和折射后不变; (n'-n)/r对一个折射面为常量,用α表示,可得:写成矩阵形式为:上式中,称为折射矩阵,表示近轴区经折射后参量nu和y值的变化,该矩阵用R表示。
如使则有2.过渡矩阵(转面矩阵)光线由一个参考面射向另一个参考面,光线在后一个参考面上的坐标发生变化,可用一个过渡矩阵来表示。
一个光学系统由k个折射面和(k-1)个间隔组成,第i个折射面上的坐标向第i+1 面上过渡时,由过渡公式可写出写成矩阵形式为上式中称为过渡矩阵或转面矩阵,用D i表示。
也可以写成3.传递矩阵光线经过光学系统可用一系列的折射矩阵和过渡矩阵的乘积来表示,该乘积即为传递矩阵。
对于k个折射面系统,可写出矩阵表示式为上式中,T为传递矩阵,其表达式为以上计算必须按由第1面到第k面的顺序进行。
当己知系统的结构参数(r、n、d) 时,可求得A、B、C、D的值,它们是光学系统r、n、d的函数。
光线传输矩阵推导过程光线传输矩阵是一种用于描述光线在光学系统中传输的数学工具。
它可以用来计算光线在光学系统中的传输路径和光强分布。
本文将介绍光线传输矩阵的推导过程。
我们需要了解一些基本概念。
在光学系统中,光线可以被描述为一条从一个点出发的矢量。
这个点可以是光源、物体或者像点。
光线的传输可以通过一系列的光学元件来实现,例如透镜、棱镜、反射镜等。
每个光学元件都有一个传输矩阵,它描述了光线在该元件中的传输过程。
假设我们有一个光学系统,由多个光学元件组成。
我们可以将整个系统看作是由多个小的光学元件组成的。
每个小的光学元件可以被描述为一个传输矩阵。
我们可以将这些小的传输矩阵组合起来,得到整个系统的传输矩阵。
现在,我们来推导一个光学元件的传输矩阵。
假设我们有一个光学元件,它将一个入射光线转换为一个出射光线。
我们可以将入射光线表示为一个列向量,出射光线表示为另一个列向量。
我们可以将这两个列向量组合成一个矩阵,称为传输矩阵。
传输矩阵的推导需要用到矩阵乘法的知识。
假设我们有一个光学元件,它将一个入射光线转换为一个出射光线。
我们可以将入射光线表示为一个列向量,出射光线表示为另一个列向量。
我们可以将这两个列向量组合成一个矩阵,称为传输矩阵。
假设我们有一个入射光线,它的方向向量为u,入射点为P1,出射点为P2。
我们可以将入射光线表示为一个列向量:u1 = [u1x, u1y, u1z, 0]T其中,T表示转置。
我们将最后一项设置为0,是因为我们只考虑光线的方向,而不考虑光线的位置。
同样地,我们可以将出射光线表示为一个列向量:u2 = [u2x, u2y, u2z, 0]T我们可以将光学元件的传输矩阵表示为一个4x4的矩阵M:M = [a, b, c, d;e, f, g, h;i, j, k, l;0, 0, 0, 1]其中,a、b、c、d、e、f、g、h、i、j、k、l都是实数。
我们可以将传输矩阵作用于入射光线上,得到出射光线:u2 = Mu1我们可以将这个式子展开,得到:u2x = au1x + bu1y + cu1z + du1wu2y = eu1x + fu1y + gu1z + hu1wu2z = iu1x + ju1y + ku1z + lu1wu2w = 0其中,w表示光线的强度。
光线传输矩阵推导过程光线传输矩阵(Ray Transfer Matrix)是描述光线在光学系统中传输的数学工具,也被称为 ABCD 矩阵。
在光学系统中,常常需要知道光线从一个位置传输到另一个位置,因此需要将光线传输过程用数学描述出来。
光线传输矩阵是一种简便的描述光线传输过程的方法,可以用于计算光学系统的成像性能、衍射现象等。
1. 光线传输是沿直线传播的;2. 光线的传播满足亥姆霍兹方程;3. 光学系统是轴对称的,即沿光路方向上的所有点都是轴对称的。
在这些假设的基础上,可以推导出光线传输矩阵的一般形式。
假设一束光线在一个点 P 处(位置矢量为 [x, y, z])的方向余弦分别为 l, m, n,那么在向前传播一段距离 d 之后,在点 Q(位置矢量为[x′, y′, z′])处的方向余弦分别为l′, m′, n′。
下面推导光线传输矩阵。
首先,根据第一条假设,可以得到:x′ = x + dly′ = y + dmz′ = z + dn然后,根据亥姆霍兹方程,可以得到:$$\frac{\partial^2\psi}{\partial x^2} + \frac{\partial^2\psi}{\partial y^2} + \frac{\partial^2\psi}{\partial z^2} + k^2\psi = 0$$其中,$\psi$ 表示复振幅,$k$ 表示波数,$k = 2\pi/\lambda$。
假设在点 P 处的复振幅为 $\psi_0$,则在点 Q 处的复振幅为:$$\psi = \psi_0e^{ikn′d}$$其中,$n′d$ 表示传输距离。
忽略高阶小量,可以进一步简化为:$$\frac{\partial^2\psi_0}{\partial x^2}dl^2 +\frac{\partial^2\psi_0}{\partial y^2}dm^2 + \frac{\partial^2\psi_0}{\partialz^2}dn^2 + 2\frac{\partial^2\psi_0}{\partial x\partial y}dldm +2\frac{\partial^2\psi_0}{\partial x\partial z}dldn +2\frac{\partial^2\psi_0}{\partial y\partial z}dmdn + k^2\psi_0 = 0$$接下来,定义一个 2x2 的矩阵 A 和一个 2x2 的矩阵 B,它们分别表示在点 P 和点Q 处的光线倾斜角(slopes)和射线高度(heights):然后,将光线传输方程改写为矩阵形式:$$\begin{bmatrix} l′ \\ m′ \end{bmatrix} = M\begin{bmatrix} l \\ m\end{bmatrix}$$其中,$M$ 表示光线传输矩阵,它可以通过将以上方程变形得到:根据矩阵乘法的定义,可以将 $M$ 表示为:其中,$$\begin{aligned} A_{11} &= 1 + \frac{\partial l}{\partial z}d +\frac{\partial^2\psi_0}{\partial x\partial z}d\frac{\partial l}{\partial z}d \\ A_{12} &= d + l\frac{\partial^2\psi_0}{\partial x\partial z}d \\ A_{21} &=\frac{\partial m}{\partial z}d + m\frac{\partial^2\psi_0}{\partial y\partial z}d \\ A_{22} &= 1 + \frac{\partial m}{\partial z}d + \frac{\partial^2\psi_0}{\partial y\partial z}d\frac{\partial m}{\partial z}d \\ B_1 &= x +l\frac{\partial\psi_0}{\partial z}d +\frac{1}{2}\left(\frac{\partial^2\psi_0}{\partial x^2}l^2 +\frac{\partial^2\psi_0}{\partial y\partial x}lm +\frac{\partial^2\psi_0}{\partial x\partial z}ldx\right)d \\ B_2 &= y +m\frac{\partial\psi_0}{\partial z}d +\frac{1}{2}\left(\frac{\partial^2\psi_0}{\partial y\partial x}lm +\frac{\partial^2\psi_0}{\partial y^2}m^2 + \frac{\partial^2\psi_0}{\partialy\partial z}mdy\right)d \\ C_1 &= -\frac{1}{2}\frac{\partial^2\psi_0}{\partial x\partial y}d^2lm \\ C_2 &= -\frac{1}{2}\frac{\partial^2\psi_0}{\partialy\partial x}d^2lm \end{aligned}$$可以看到,光线传输矩阵 $M$ 的每一项都可以用初始光线的方向余弦和位置来表示。
测量光学传输矩阵的方法说实话测量光学传输矩阵这事,我一开始也是瞎摸索。
我试过好多种方法,走了不少弯路才渐渐有点明白。
我最开始的时候,完全不知道从哪里入手。
就像在黑暗里找东西,到处乱撞。
我查了好多资料,按照一些书上说的老方法来做。
那方法看着很简单,就是调节一些光学仪器,然后记录数据,再计算。
可是我发现我做得一塌糊涂。
后来我才明白,是我对仪器的细节设置理解错了。
比如说那个调节光强的旋钮,我以为转一点点没什么差别,结果这一点点就导致数据完全不对。
这就好比你做菜的时候,盐放得稍微不对,整个菜的味道就不对了。
这算是我第一个失败的教训。
后来我又换了一种比较新的设置方法。
这个方法里要用好多个镜子和透镜来调整光路。
说实话,刚开始的时候那些镜子和透镜的位置可把我折腾死了。
光线一会儿强一会儿弱,而且方向也不对。
我就跟个无头苍蝇一样,不断调整镜子的角度。
我记得有一次因为一个镜子稍微歪了一点,整个光路就乱套了。
我当时就特沮丧,但是我也知道,做这个就得多尝试。
再之后,我开始注重每次调整后的数据记录。
光靠估计是不行的,一定要精确。
比如说光强的数值,以前我就大概写个数字,现在就得用精度高的仪器准确测量。
我发现只要这些基础数据准确了,后面计算光学传输矩阵就顺利很多。
不过我还得说,我现在对一些复杂的光路计算还是有点不确定。
但我目前的经验是,如果遇到光路交叉或者多次反射折射的情况,就把它拆分开来,一段光路一段光路地去分析。
这样虽然速度慢一点,但是不容易出错。
还有就是在参考别人的实验方法的时候,不能完全照搬。
因为每个实验室的仪器啊环境啊都有差别。
比在我之前参考一个国外的实验流程,他们那仪器的精度和我这的不一样,所以按照他们的方法做出来的数据不对。
后来我根据自己这儿仪器的具体情况,调整了一下参数,才慢慢有了正确的结果。
在这个不断尝试的过程中,我渐渐发现,测量光学传输矩阵没有一个一劳永逸的完美方法,很多时候就是要不断从错误中学习,从失败里去找可能成功的路。
光线传输矩阵技术在光学成像中的应用光学成像是现代科技领域中一个重要的研究方向,其在医学、工业、科研等领域都有广泛的应用。
但是光学成像技术受到像散、畸变、干扰等因素的影响,也将限制成像效果和质量。
随着科技的不断进步,人们逐渐发现使用光线传输矩阵技术在光学成像中的应用将能有效地解决这些问题。
光线传输矩阵技术,简称RTM技术,是在传递光线过程中,将入射光线和出射光线之间存在的映射关系表示出来的一种数学方法。
RTM技术可用来进行光线传输过程的模拟,在光学成像、光学通信、光学传感器等方面都有广泛的应用。
在光学成像方面,RTM技术被用于消除光比较散的影响。
因为当光线经过多次反射、散射、透射后,其会发生散射,从而导致成像不清晰,影响成像效果。
但是,使用RTM技术,可以通过纠正光线传输矩阵,来减少或消除散射的影响。
以医学成像为例,医学成像中常用CT、MRI等成像方法,但以上方法在成像出来后,容易出现散射、噪点等。
通过RTM技术,可以提高成像的分辨率和对比度,消除噪点等干扰,从而更准确地捕捉病变区域的信息,提高医学成像的诊断准确性。
此外,RTM技术还可以用于光学通信和光学传感器领域。
因为在光学通信和传感器中,光线会受到环境因素和设备对光线的影响,从而导致数据传输不稳定,精度不高等问题。
通过RTM技术,可以对信道进行模拟分析,修复信道传输矩阵,从而提高数据传输的稳定性和准确性。
然而,RTM技术也面临一些挑战和限制。
首先,RTM技术需要大量计算资源和算法支持,才能在实际应用中发挥作用。
其次,RTM技术对于光源和探测器的空间位置相对稳定,对于光传输环境的变化较为敏感。
因此,当物体的位置发生改变或对环境变化进行成像时,需要重新对光线传输矩阵进行修复和校正。
总的来说,随着物理学、数学等学科的不断发展和深入研究,RTM技术将会得到更完善的发展和应用。
其在光学成像、光学通信、光学传感器等领域的重要性和应用前景将会更加广阔。
光学成象中的矩阵方法(i)──光线变换矩阵和abcd定理
光学成象中的矩阵方法是一种用于研究和描述光线变换的数学工具,可广泛应用于光学和光学成象的研究。
有两种主要的光线变换矩阵方法:光线变换矩阵和abcd定理。
光线变换矩阵(Ray Tracing Matrix)用于描述从一个场景中光线如何传播到另一个地方。
它是一种矩阵数学,可以用于分析特定光线的变换情况,也可以用于阐释光线与物体表面形式的响应。
它的应用主要有两个阶段:追踪和折射。
追踪的过程称为折射,它描述了光线从光源发射到目标处产生折射的情况。
而折射的过程则描述了光线从目标物体表面穿过时,在反射、折射和其他方面的变化。
另一种矩阵方法是abcd定理,即“旋转平板-棱镜-折射矩阵定理”。
它是一个描述光线入射光路和出射光路之间变换关系的理论,是一种把在不同环境中发生的光学成象结果用矩阵来描述的方法。
abcd定理是一种具有双子性的矩阵理论,能使用户通过建立一个矩阵来更好的理解发生在不同环境中的光学成象结果。
通过光线变换矩阵和abcd定理,可以在简单和精确的方式中分析光线的变换情况,进而帮助用户更快速的了解物体的表面形状和准确的传播光线。
两种矩阵方法都特别有用,在光学研究和光学成象中发挥着重要作用,不仅有助于快速高效地分析和理解光线变换,而且还可以有效地准确预测出物体表面变化所产生的光学成象结果。
因此,光线变换矩阵和abcd定理已经成为光学和光学成象研究中不可替代的数学技术手段。