花生收获机技术与专利发展
- 格式:pdf
- 大小:94.85 KB
- 文档页数:1
国内外花生收获机械发展历程作者:暂无来源:《农业开发与装备》 2012年第4期花生是世界范围内的重要的油料作物与经济作物,也是我国最具国际竞争力的优质油料作物和重要的出口创汇农产品,同时又是农业结构调整重点发展和扶持的对象。
世界花生种植主要集中在亚洲、非洲及南美洲。
我国花生种植较为广泛,除青海省之外其他省份均有种植。
据统计,2010年我国花生种植面积与产量的均创下了历史新高,种植面积约为7000万亩,占世界种植总面积的20%,居世界第2位;产量约为1500万吨,占世界总产量的35%左右,居世界第1位。
花生收获季节性强,人工作业劳动强度高,效率低,收获损失大,占用农时多,花生生产的发展必须依靠成熟的机械化收获技术,但一直以来,我国的花生收获机械发展事业进程较为缓慢,严重制约了我国花生产业的发展。
近年来,随着我国城镇化、工业化过程的加快,农村劳动力结构性短缺问题日益突出,社会各界对发展花生收获机械化的要求极为迫切。
了解国内外花生收获机械的发展过程及发展动态,对我国花生收获机械化的发展有重要指导意义。
一、收获机械总体发展过程与机型花生的收获经历了手拔、镢刨、犁耕和机械收获四个阶段。
花生机械化收获就是收获过程中的挖掘、清土、摘果、清选、集果、秧蔓处理等作业全部或部分由机械完成。
目前花生收获机械按其功能可以分以下几类:花生挖掘犁(机):仅具有挖掘花生功能。
花生收获机(挖掘机):具有分离泥土和铺放功能,但仍需人工或机械捡拾、摘果。
花生复收机:将花生收获过程中遗留在土壤中的花生果从土壤中分离出来,并抛撒在地面上,然后由人工捡拾回收。
花生摘果机:将花生荚果从花生蔓(秧)上摘下,并进行清选除杂。
捡拾联合收获机:用于两段收获模式下的联合收获作业,完成捡拾、摘果、清选、集果、秧蔓处理等作业。
联合收获机:一次完成挖掘、清土、摘果、果杂分离、果实收集和秧蔓处理等花生收获作业的全部工序。
当前,花生收获机械化在全球范围内呈现出明显的发展不平衡性,其中美国等少数发达国家花生机械化收获技术已非常成熟和先进,花生收获过程全部实现机械化作业;我国目前多数地区仍以人工收获为主。
花生生产全程机械化技术模式探讨花生是一种重要的农产品,具有丰富的营养价值和经济价值。
在传统的花生生产过程中,劳动力成本高,劳动强度大,效率低下,同时对土地资源的利用也存在一定的局限。
研究和推广花生生产全程机械化技术模式,对提高生产效率、降低生产成本、保护土地资源具有重要意义。
本文将对花生生产全程机械化技术模式进行探讨,希望能够对花生生产的现代化发展提供一定的参考和借鉴。
一、花生生产的传统模式存在的问题传统的花生生产模式主要依靠人工劳动,劳动强度大,劳动效率低下。
在播种阶段,传统的花生种植主要依靠人工手工挖坑、下种,这种方式效率低下且劳动强度大。
在花生的田间管理过程中,包括除草、施肥、喷药等环节,也依赖过多的人工劳动,劳动成本高,且无法保证管理的及时性和效果。
在收获环节,传统的花生收获依靠人工手工挖掘,不仅劳动量大,而且易损伤花生果实,影响产品质量。
传统的花生生产模式不仅劳动强度大,效率低下,同时也对土地资源的使用存在一定的浪费,对环境的污染也较为严重。
花生生产全程机械化技术模式是指通过机械化设备和技术手段,实现从花生的种植、管理到收获的全程自动化或半自动化生产模式。
其主要特点包括:1. 提高生产效率。
采用机械化技术进行花生生产能够大大提高生产效率,减少人工劳动,降低生产成本,提高农产品的产量和质量。
2. 降低生产成本。
机械化生产可以有效降低人工成本,减少了人工劳动,节约了人力资源,降低了生产成本,提高了农民的收入。
3. 保护土地资源。
机械化生产可以减少对土地资源的破坏,合理利用土地资源,保护土壤环境,提高土壤肥力,保持土地的可持续利用能力。
4. 提高产品质量。
机械化生产可以减少人工作业对花生果实的损伤,提高产品的质量和市场竞争力。
5. 减少环境污染。
机械化生产可以减少农药和化肥的使用量,减少环境污染,保护生态环境。
在中国,目前已经有不少农业企业和种植大户开始尝试使用机械化技术进行花生生产。
他们主要应用以下几种机械化设备和技术手段:1. 种植阶段。
《我国花生收获机械的现状与发展趋势》花生作为我国重要的经济作物之一,在农业生产中占据着重要的地位。
花生的收获环节对于整个花生产业链的顺利运转起着至关重要的作用。
然而,长期以来,我国花生收获主要依靠传统的人工方式,劳动强度大、效率低下,严重制约了花生产业的发展。
随着科技的不断进步,花生收获机械应运而生,并且在我国的农业生产中逐渐得到推广和应用。
本文将深入探讨我国花生收获机械的现状与发展趋势。
一、我国花生收获机械的现状(一)发展历程我国花生收获机械的发展经历了一个从无到有、从简单到复杂的过程。
早期,我国主要依赖进口花生收获机械,但由于价格昂贵、适应性差等问题,难以在广大农村地区普及推广。
为了满足国内市场需求,我国农机科研机构和企业开始自主研发花生收获机械。
经过多年的努力,我国花生收获机械在技术水平、性能质量等方面都取得了显著的进步,逐渐形成了具有一定规模和竞争力的产业体系。
(二)市场规模近年来,我国花生收获机械市场呈现出快速增长的态势。
随着农村劳动力的转移和农民对农业机械化的需求不断增加,花生收获机械的市场需求持续扩大。
另国家对农业机械化的政策支持力度不断加大,对花生收获机械的购置补贴也在逐步提高,进一步促进了市场的发展。
据统计,我国花生收获机械的市场规模已经达到了数十亿元,并且还在不断扩大。
(三)产品类型目前,我国市场上的花生收获机械主要包括以下几种类型:1. 挖掘式花生收获机:这种机械通过挖掘铲将花生植株从土壤中挖掘出来,然后进行抖土、摘果等作业。
挖掘式花生收获机具有结构简单、适应性强等特点,适用于多种土壤条件下的花生收获。
2. 摘果式花生收获机:摘果式花生收获机主要通过摘果机构将花生果从植株上摘下,然后进行清选等作业。
摘果式花生收获机具有收获效率高、损失率低等优点,是目前市场上应用较为广泛的一种花生收获机械。
3. 联合式花生收获机:联合式花生收获机集挖掘、摘果、清选等功能于一体,具有作业效率高、一次性完成收获作业等特点。
花生收获机械的应用与发展
沈庆彬;唐洪杰;陈香艳;宋西芳;陈芳;宿刚爱
【期刊名称】《农业科技通讯》
【年(卷),期】2013(000)005
【摘要】随着花生种植面积的不断增长,花生收获机械的需求越来越迫切,且将成为花生生产环节的主要发展方向,也是花生机械化生产的必备工具.本文介绍了国内外花生收获机械的现有应用状况和发展概况,通过对沂南县三种花生收获机应用示范作业的比较,具体分析了各个的工作原理及其优缺点,并简单论述了花生收获机械的发展趋势.
【总页数】2页(P214-215)
【作者】沈庆彬;唐洪杰;陈香艳;宋西芳;陈芳;宿刚爱
【作者单位】山东省临沂市农业科学院临沂276012
【正文语种】中文
【相关文献】
1.河南省花生收获机械应用现状与发展分析
2.花生收获机械发展与应用现状
3.花生收获机械发展与应用现状
4.美国花生收获机械现状与发展
5.国内外花生收获机械发展历程与发展思路
因版权原因,仅展示原文概要,查看原文内容请购买。
中国花生脱壳机械研究应用现状及进展1. 应用背景花生是我国重要的经济作物之一,广泛种植于全国各地。
然而,传统的手工脱壳方式效率低下、劳动强度大,无法满足大规模生产的需求。
为了提高花生加工效率和降低人工成本,我国在花生脱壳机械研究应用方面取得了显著进展。
2. 应用过程2.1 传统方法的局限性传统的花生脱壳方法主要依靠人工操作,包括手工敲击、摩擦等方式。
这种方法存在以下问题: - 劳动强度大:需要大量人力投入,劳动强度高。
- 效率低:手工操作速度慢,无法满足大规模加工需求。
- 质量不稳定:人工操作容易造成花生磕碰、损坏等问题。
2.2 机械化脱壳技术的应用为了克服传统方法的局限性,我国在花生脱壳机械研究应用方面进行了大量工作。
机械化脱壳技术的应用过程如下: 1. 花生清洗:将采摘回来的花生进行清洗,去除杂质和泥土。
2. 烘干处理:将清洗后的花生进行烘干,使其含水率降低,便于后续脱壳处理。
3. 机械脱壳:将烘干后的花生送入花生脱壳机械中进行脱壳。
花生脱壳机械主要包括振动筛、破壳器、风选器等设备。
4. 分选与包装:经过脱壳处理后,将花生通过分选设备进行分级筛选,并进行包装。
2.3 进展及创新我国在花生脱壳机械研究应用方面取得了一系列创新进展: - 设备优化:针对不同规格和品种的花生,研发出适应性更强的脱壳设备。
例如,采用可调节振动频率和振幅的振动筛,可以根据不同花生的大小和形状进行调整,提高脱壳效果。
- 自动化控制:引入自动化控制技术,实现花生脱壳过程的智能化和自动化。
通过传感器和控制系统的配合,可以实时监测花生脱壳过程中的温度、湿度、脱壳率等参数,并进行调整和优化。
- 机械结构创新:改进传统破壳器的结构,提高破壳效果和稳定性。
例如,采用双辊破壳器可以提高破壳效率,并减少花生损伤的风险。
3. 应用效果3.1 提高加工效率机械化脱壳技术的应用大大提高了花生加工的效率。
相比传统手工操作,机械脱壳设备能够实现连续、自动化处理,大幅减少了人力投入和加工时间。
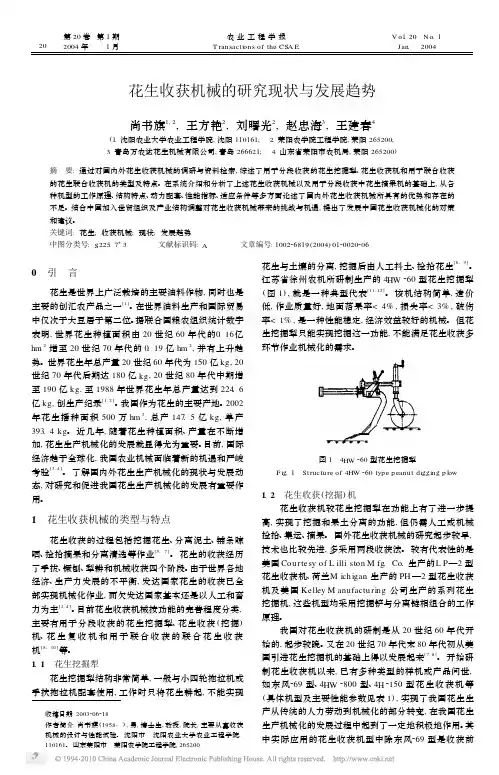
第20卷第1期2004年1月农业工程学报T ransacti ons of the CSA E V o l .20 N o.1Jan . 2004花生收获机械的研究现状与发展趋势尚书旗1,2,王方艳2,刘曙光2,赵忠海3,王建春4(1.沈阳农业大学农业工程学院,沈阳110161; 2.莱阳农学院工程学院,莱阳265200;3.青岛万农达花生机械有限公司,青岛266621; 4.山东省莱阳市农机局,莱阳265200)摘 要:通过对国内外花生收获机械的调研与资料检索,综述了用于分段收获的花生挖掘犁、花生收获机和用于联合收获的花生联合收获机的类型及特点。
在系统介绍和分析了上述花生收获机械以及用于分段收获中花生摘果机的基础上,从各种机型的工作原理、结构特点、动力配套、性能指标、适应条件等多方面论述了国内外花生收获机械所具有的优势和存在的不足。
结合中国加入世贸组织及产业结构调整对花生收获机械带来的挑战与机遇,提出了发展中国花生收获机械化的对策和建议。
关键词:花生;收获机械;现状;发展趋势中图分类号:S 225.7+3 文献标识码:A 文章编号:100226819(2004)0120020206收稿日期:2003206218作者简介:尚书旗(1958-),男,博士生,教授,院长,主要从事收获机械的设计与性能试验。
沈阳市 沈阳农业大学农业工程学院,110161。
山东莱阳市 莱阳农学院工程学院,2652000 引 言花生是世界上广泛栽培的主要油料作物,同时也是主要的创汇农产品之一[1]。
在世界油料生产和国际贸易中仅次于大豆居于第二位。
据联合国粮农组织统计数字表明,世界花生种植面积由20世纪60年代的0.16亿hm 2增至20世纪70年代的0.19亿hm 2,并有上升趋势。
世界花生年总产量20世纪60年代为150亿kg ,20世纪70年代后期达180亿kg ,20世纪80年代中期增至190亿kg ,至1988年世界花生年总产量达到224.6亿kg ,创生产纪录[1,2]。

美国花生收获机械现状与发展□陈中玉高连兴花生起收机和花生捡拾收获机是美国两段式花生收获的核心机械,此外,还包括花生条铺处理机、花生田间运输车、花生干燥运输车和花生秸秆捡拾打捆机等。
花生起收机起收是花生收获过程第一步,也是两段收获的前段,其功能是切断花生主根、松动根部和荚果周围土壤,并将花生从土壤中起出,去掉所夹带的土壤并使花生植株荚果朝上或朝向侧面有序铺放于地面,以利于杨过直接辐照而晾晒。
目前,美国有AMADAS、KMC、COLOMBO、FERGUSON和PEARMAN等5个以农业机械为主的机械制造公司,生产两种类型的花生起收机。
根据植株输送、去土和放铺原理不同,花生起收机分链杆振动式翻转放铺起收机和链条夹持输送式放铺起收机两种,前者简称为铲链组合式,后者简称为铲夹组合式。
KMC、AMADAS、FERGUSON以及COLOMBO 系列花生起收机的总体结构和原理相似,均属于铲链组合式,而PEARMAN生产铲夹组合式花生起收机。
美国典型铲链组合式花生起收机除机架、限深轮、传动和控制系统外,主要由起挖装置(圆盘刀、带栅条的起土铲)、齿杆链式升运装置(包括齿杆与两侧的套筒滚子链构成的升运链、链轮等)、固定轮式去土装置(按一定间距固定在机架上的去土轮、轮架等构成)、翻转放铺装置(缺口圆盘式翻转轮,曲线形翻转杆组或称拢禾栅)等构成。
当机组进行花生起收作业时,圆盘刀首先沿垄沟切土一定深度并切断跨垄的花生侧枝,以确保不缠绕起土铲同时减小起土铲工作阻力;起土铲以一定深度和角度入土,将花生主根切断并连同土壤铲起,花生和土壤一起沿起土铲的尾部栅条杆向后上方滑动;回转的齿杆链升运链不断抓起花生植株并向后上方输送,同时刚性齿杆通过突出的去土轮时不断受迫振动,去除花生果柄与根部的土壤;当花生植株被输送至齿杆链末端时,落在两组翻转轮和曲线形翻转杆组上并在二者联合作用下侧向翻转约180度,形成荚果朝上的整齐条铺放于田间。
PEARMAN公司生产的PEARMAN花生起收机采用铲夹组合式原理,主要区别在于其采用成对夹持链(或夹持带),夹持起挖后的花生植株中部使其向后上方输送,在输送过程中通过振动杆去土,然后在放铺杆或放铺轮作用下侧向翻转约90度,形成荚果朝上或朝向一侧的整齐条铺铺放于田间。
![一种花生联合收获机[实用新型专利]](https://uimg.taocdn.com/c3c4d1e50740be1e640e9aa8.webp)
专利名称:一种花生联合收获机
专利类型:实用新型专利
发明人:尚书旗,王健春,赵忠海,王延耀,连政国,姜元志,华伟,李世臣,王芳艳,陈旭芳,陶贤成,周惠君,赵东瑞,周尊
来
申请号:CN200520086784.0
申请日:20050903
公开号:CN2865232Y
公开日:
20070207
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种花生联合收获机,是由行走动力机构、收获机构、输送机构、摘果筛选机构和输送储存机构组成,行走动力机构的后部设有收获机构,收获机构与输送机构连接,输送机构的下方设有摘果筛选机构,动力行走机构的前部设有输送储存机构,本实用新型具有集挖掘、输送、除土、摘果、分离、清选和储存为一体、机架受力均匀、不破坏地膜、避免土壤污染、作业阻力小、作业流畅、结构紧凑、成本低、功耗低、收获损失小、效率高的特点。
申请人:莱阳农学院,青岛万农达花生机械有限公司,莱阳市农业机械服务中心
地址:265200 山东省烟台市莱阳市文化路65号
国籍:CN
更多信息请下载全文后查看。
振动筛式花生收获机毕业设计振动筛式花生收获机是一种用于花生收获的机械设备。
它主要由输送带、振动筛和底座等组成。
该设备通过震动筛和输送带的配合工作,能够有效地完成花生的收获和分选。
在本文中,将详细介绍振动筛式花生收获机的设计思路和实现。
首先,本设计采用了振动筛的结构。
振动筛可以通过振动的方式将花生从土壤中分离出来,并将其送入后续的收获装置。
振动筛的结构简单、可靠,并且能够适应不同的土壤条件。
为了提高设备的稳定性和耐用性,我们采用了高强度的材料制作振动筛的筛网,同时在连接处加入了可调节的螺栓,以便根据不同的需求调整振动筛的工作效果。
其次,本设计还考虑到了花生收获后的分选工作。
在振动筛之后,设置了一个输送带来完成花生的分选。
输送带上安装了多个分选装置,可以根据花生的大小和质量将其分成不同的等级。
这样可以提高花生收获的效率,并减少后续的加工成本。
另外,为了保证设备的安全运行和操作的便捷性,本设计还考虑了相应的控制系统。
控制系统主要包括电机、传感器和控制面板等。
电机用于驱动输送带和振动筛的工作,传感器则用于监测设备的运行状态和花生的分选情况。
控制面板可以进行设备的启动、停止和调节工作参数等操作。
通过合理的控制系统设计,可以提高设备的自动化程度,减少人工操作的繁琐性。
最后,本设计还考虑了设备的可移动性。
在底座上安装了四个脚轮,以便于设备的移动和固定。
在实际使用中,可以根据花生的种植区域和收获时间的需要将设备移动到相应的位置,从而提高整个收获过程的效率。
综上所述,振动筛式花生收获机是一种高效、可靠的花生收获设备。
通过合理的结构设计和控制系统的应用,可以提高花生收获的效率,并减少后续加工的成本。
在未来的实际应用中,我们相信该设备将有着广阔的市场前景,并为农业生产带来实实在在的效益。
专利名称:花生捡拾收获装置
专利类型:实用新型专利
发明人:齐金财,岳红霞,宋海飞,张敏,田丽丽申请号:CN201720700830.4
申请日:20170615
公开号:CN206821268U
公开日:
20180102
专利内容由知识产权出版社提供
摘要:本实用新型主要应用于花生收获领域,特别涉及一种花生捡拾收获装置,包括收获台和过桥升运器,收获台包括割台体,割台体的前部横向设置拾禾器,后端连接过桥升运器,拾禾器包括横向安装在割台体上的凸轮轴,凸轮轴的外周圆周分布有齿杆,齿杆上对应凸轮轴上的凸轮横向分布有弹齿,齿杆的外侧设置护板,弹齿外端部露出护板,拾禾器的上方设置压送辊,后侧设置输送搅龙。
本实用新型收获幅宽内全喂入,收获效率高。
伸缩式弹齿,捡拾效果好。
申请人:山东巨明机械有限公司
地址:256410 山东省淄博市桓台县张北路253号
国籍:CN
代理机构:青岛发思特专利商标代理有限公司
代理人:马俊荣
更多信息请下载全文后查看。
专利名称:花生联合收获机
专利类型:实用新型专利
发明人:王洪君,闵令强,黄保申,张永忠,张书峰,李庆福,李庆金,赵广英,李靖,孙连军
申请号:CN200420053233.X
申请日:20040824
公开号:CN2722592Y
公开日:
20050907
专利内容由知识产权出版社提供
摘要:本实用新型公开了一种花生联合收获机,它是在申请号为200420041347.2的中国实用新型专利申请的花生联合收获机技术基础上的改进,它包括拖拉机1、机架9、传送器20、提升器21、果箱22、主变速箱19和果筛16,它还包括机架9下面的摘果器71,摘果器71前面的两个拍土板80,机架9后面主要由抛秧支架85、抛秧从动链轮86、抛秧主动链轮87、抛秧夹板88组成的抛秧机构,果筛16后面的抛杂筛99。
本实用新型的花生联合收获机由于增加了专门设计的除土、摘果、抛秧和抛杂机构,所以摘果效果更理想,除杂也更彻底。
申请人:山东双力集团股份有限公司
地址:252056 山东省聊城市建设东路27号
国籍:CN
更多信息请下载全文后查看。