- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
五.平面四杆机构的特点及应用 1.特点: 优 1)低副,成本低,精度高; 点 2)面接触,利于润滑及减少磨损,传载大,可靠性高。
缺点: 不能精确实现任意运动规律。
2.应用: 1)实现已知运动规律 2)实现给定点的运动轨迹
应用: 1.手动冲床: ← 两个四杆机构组成 (双摇杆~+摇杆滑 块机构)
2.筛料机构: 六杆机构←两个四杆 机构组成(双曲柄~
O θ
θ是C1C2弧上 的圆周角
→如何作此圆
→ ∠ C1PC2=θ P点→可作 ∠ C2C1P=90° ∠ C1C2PC2交圆
P
于P点
解:(1)任选D点,作摇杆两极位C1D和C2D
(2)过C1作C1C2垂线C1M
作∠C1C2N=90-θ,
φ
C1M与C2N交于P点
θ
B2
∵最短+最长杆<其它两杆之和 架杆 摇杆 ?
最短杆在 机架
→双曲柄→转动导杆机构
机架邻边 →一个曲柄→摆动导杆机构
当 机架<曲柄
机架>曲柄
转动导杆机构 摆动导杆机构 γ
α =0°
三、摇块、定块机构 p.27
曲柄滑块机构 →滑块移动
图2-15a
导杆机构 →滑块移动+摆动 图2-16,2-15b
摇块机构 →滑块摆动
连杆给定的三个位置
C1
铰点已给定
步骤:
B1
1.连接 B1B2 ,B2B3
,C1C2,C2C3 2.作各连线中垂线
3.B1B2, B2B3中垂线 之交点即为点A
C2 B2
B3 C3
D 唯一解
4.C1C2,C2C3中垂线 之交点即为点D
5.连接AB1C1D即为 A
B
所求
(选作)作业2-6(1) P.36 A
二、学习内容
1.常用机构(组成原理、运动学和动力学)-机械原理 连杆机构、凸轮机构、齿轮机构、间歇运动机构…
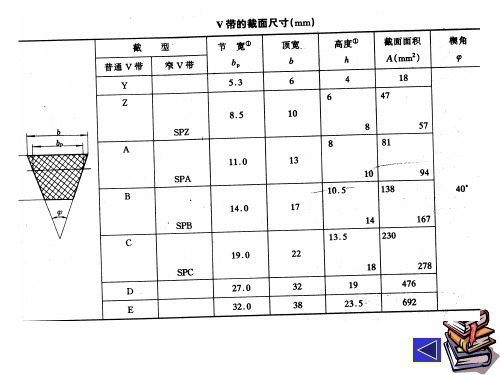
2.通用零件(设计与计算)-机械设计 联接:螺纹联接、键联接、销联接… 传动: 带传动、链传动、齿轮传动、蜗杆传动 轴与轴系零部件: 轴、轴承、联轴器 其它: 弹簧…
传动零件 轴系零件 联接零件
(3)过C1、C2、 B1 A
D
P 作圆
O
在圆上任选一点A (4)AC1=L2-L1,
AC2=L2+L1→
θ
→无数解
L1=1/2(AC2-AC1)
以L1为半径作圆,交B1,B2点
P
→曲柄两位置
NM
2.导杆机构: P.31
已知:机架长L4 , K
解:
180
K
1
n
m
K 1
(1)任选固定铰链中心C→
+曲柄滑块~)
2-4 平面四杆机构的设计 P.30
根据给定的运动条件→运动简图的尺寸参数
实现已知(从动件)运动规律 (位置,速度,加速度)
实现给定点的运动轨迹
→ 解析法→精确 作图法→直观 ※ 实验法→简便
一.按照给定的行程速比系数设计四杆机构(作图法) √ 二.按给定连杆位置设计四杆机构(作图法) √
(2)最短杆在机架邻边→曲柄摇杆机构
(3)最短杆在机架对边 →双摇杆机构
实例分析: AB=70, BC=90, CD=110, AD=40
∵AD+CD=40+110=150<AB+BC=160
C
当:①AD为机架
→双曲柄~ B
②AB或DC为机架 →曲柄摇杆~
③BC为机架
→双摇杆~ A
D
§2-3铰链四杆机构的演变 p.26
图2-5
曲柄摇杆机构摇杆主动→死点
死点 → 机构运动卡死 机构运动不确定
措施 → 飞轮
图2-4曲柄摇杆机构
自身惯性
存在死点条件:有极限位置(从动件与连杆共线)
三、压力角和传动角 p.22倒6, 图2-7
1.压力角α- 作用在从动件上的驱动力F与该力作用
点绝对速度VC之间所夹的锐角。
分析:BC是二力杆,驱动
曲柄滑块机构↗
图2-23 p.29
一.曲柄滑块机构:p.27 图2-14c、d
摇杆3的运动轨迹为圆弧(半径l3)
→将l3↑无穷大 →滑块C(直线)→曲柄滑块机构
对心曲柄滑块机构
l3
曲柄摇杆机构 压力角α、传动角γ: C α
l3 e
偏置曲柄滑块机构
γ
α
e
二、导杆机构 p.26
曲柄滑块机构(曲柄→机架) 导杆机构 两连→ 曲柄 ?
机构由构件(运动单元)组成,
运动单元: 1.箱体 2.活塞 3.连杆
4.曲轴 5、6.齿轮 7.凸轮 8.推杆
(齿轮机构由三个构件组成-1、5、6)
构件由零件(制造单元)组成。
(齿轮5由许多零件组成)
构件5← 齿轮
→传动件
(齿轮5) 轴、轴承、套筒等 →轴系零件
键
→联接件
最基本 →的通用
零件
机器具有确定的相对运动、完成机械功或转换机械能的组合体 机构具有确定的相对运动组合体,是机器所共有的组成部分 构件运动的单元 零件制造的单元
当杆1处于AB ’ 位置→ △AC ’ D
→┌(l2-l1) +l3 ≥l4 →┌l1+l4≤l2+l3 (2-3)
└(l2-l1) +l4 ≥l3 └l1+l3≤l2+l4 (2-4) 当杆1处于AB ”位置→ △AC ”D
C
C”
→ l1+l2≤l3+l4
三式相加 → ┌ l1≤l2
L1最短
│ l1≤l3 └ l1≤l4
例: 门式起重机的变速机构: CD(杆3)为原动件, 悬挂重 物的E 点在连杆上→保持E点运动轨迹在近似水平线上。 (平移货物→平稳、减小能量消耗)
二.(铰链四杆机构)演变类型
2C
B
3
1
A
4
D
→铰链四杆机构
(全由转动副相联)
B
1
2
C
A
4
3
曲柄滑块机构
导杆机构 偏心轮机构
(二)曲柄摇杆机构的主要特性 P.21
图2-15c,2-17
定块机构 →滑块为固定件 图2-15d,2-18
C
C
C
C
B
B
A
A
曲柄滑块机构 导杆机构
B A
摇块机构
B
A 定块机构
定 块 机 构 摇块机构
四、偏心轮机构 图2-23图C p.29
B A
C
B
e
C
A
曲柄 回转副B (半径↑) >曲柄长AB →偏心轮机构 (铰链四杆、曲柄滑块~) (曲柄很短时→偏心轮机构)→偏心距=e=曲柄长 铰链四杆、曲柄滑块机构→(扩大回转副) 偏心轮机构
铰链四杆机构→ 图2-14
┌(全)转动副连接 →移动副(一个) └各杆长不变 →杆长(固定杆)可变
→曲柄滑块机构
曲柄滑 导杆机构(曲柄AB →机架) 图2-15.b 块机构→ 摇块机构(连杆BC →机架) 图2-15.C
(变更机架) 定块机构(滑块C →机架) 图2-15.d
C B
B C
A
D
A
铰链四杆机构↘ →扩大回转副→偏心轮机构
机械设计基础
研究对象和内容 课程特点和学习要求
一、 研究对象和内容
机器1:.实物组合
2.各实物间有确定的运动
3.做有用功或转换能量
-利用机器来减轻劳动和提高生产率
机器种类: 金属切削机床
机构:
内燃机 汽车 拖拉 机 起重机 …
-具备1、2特征
零件 -制造单元
机械
机构和机器的总称
机器由机构(连杆机构、凸轮机构、齿轮机构)组成
(2-6)
B B’
B” A
C’
D
例:AB=22,BC=50,CD=38,AD=45→曲摇机构
二.曲柄存在条件:(转动副为整转副)
1.曲柄存在条件: (1)最短与最长杆之和小于其
它两杆之和
作业2-1 p.35
(2)最短的构件在连架杆或机架上
2.推论: (满足条件1)
(1)最短杆在机架上 →双曲柄机构
传动角: =90°- 压力角越小(即传动角越大),有用的分力越大。
所以传动角是衡量机构受力大小的一个重要参数。
死点: = 90°
§2-2 铰链四杆机构有整转副的条件 P.25
-取决于机构各杆的相对长度和机架的选择
连一杆.分共析线: 的(曲极柄位lA1,二连B’.杆及曲lA柄2,B摇存”时杆在→l3条,机能件架顺:l4利)当通A过B能→摆整至转与副。
B2→B1 (φ 2) →
C2→C1 (ψ)
∵ φ 1> φ 2 , 而ψ不变
其运动特性→行程速度变化系数(行程速比系数)K
K
v2 v1
C1C2 / t2 C1C2 / t1
t1 t2
1 2
180 180
(2-1)
θ-极位夹角(摇杆处于两极位时,对应曲柄所夹锐角)
θ↑→K ↑ →急回运动性质↑
基本类型 →铰链四杆机构(全由转动副相联)
(-)铰链四杆机构
(二)曲柄摇杆机构的主要特性
(-)铰链四杆机构 p.20
-全由转动副相联的平面四杆机构
基 机架-参考系(固定件)
本 构
连架杆-与机架相联
件 连杆-不与机架相联 连架杆 B
1
机架、连杆、连架杆
A
曲柄 摇杆(摆杆) (整转) (摆转)
连杆
2
C 连架杆
3
4
D
机架
连 曲柄:可回转360°的连架杆 架 摇杆:摆角小于360°的连架杆 杆 滑块:作往复移动的连架杆