机械设计(5.8.1)--链传动的运动特性
- 格式:pdf
- 大小:353.25 KB
- 文档页数:5





返回目录学习指南第12章 链传动一.基本要求1)了解链传动的工作原理、特点及应用;2)了解滚子链的标准、规格及链轮结构特点;3)掌握滚子链传动的设计计算方法;4)对齿形链的结构特点以及链传动的布置、张紧和润滑等方面有一定的了解。
二.重点、难点指导本章的重点是:链传动的运动特性、滚子链传动的设计计算。
1.链传动的运动特性链传动是啮合传动,平均传动比是准确的。
但由于刚性链节在链轮上呈多边形分布,在链条每转过一个链节时,链条前进的瞬时速度周期性地由小变到大,再由大变到小。
链条沿垂直于运动方向的分速度也在作周期性变化,从而导致运动的不均匀性,使瞬时传动比是变化的。
可以证明链传动的瞬时传动比为βγωωcos cos 1221R R ==i 。
在传动中γ角与β角不是时时相等的,因此其瞬时传动比不断变化。
这种运动特性引起链传动的附加动载荷和振动,在选用链传动和选择链传动的参数时必须予以考虑。
2.滚子链传动的设计计算滚子链传动的设计计算主要是确定滚子链传动的尺寸。
各参数的选择很重要。
选择是否得当,直接影响链传动的设计质量。
链节距是关键的参数,其大小不仅影响传动的工作能力、运动特性而且还影响传动的尺寸。
设计计算步骤比较完整成熟,设计时只需按步进行即可(参见典型例题分析)。
三.典型例题分析例:用kW ,r/min 的电动机,通过链传动驱动一液体搅拌器,载荷平稳,传动比,试设计此链传动。
5.5=P 2.9701=n 3=i 解:1. 链轮齿数 由表12.7选;231=z 大链轮齿数 ,取。
6.73232.312=×==iz z 732=z 实际传动比 17.32373==i 误差远小于%5±,故允许。
2. 链条节数 初定中心距。
由式(12.11)p a 400=2120210222 −+++=πz z a p z z p a L p 1302237340273234022≈ −+++×=πp p p p 节 取链节数为偶数,故选取。



第12章链传动【思考题】12-1 与带传动相比,链传动有哪些优缺点?12-2 滚子链是如何构成的?其最主要的参数是什么?对传动有何影响?12-3 为什么一般链节数选偶数,而链轮齿数多取奇数?12-4 链传动中为什么小链轮的齿数不宜过少?而大链轮的齿数又不宜过多?12-5 何谓链传动的多边形效应?如何减轻多边形效应的影响?12-6 在什么条件下链传动瞬时传动比为恒定?此时链速是否也恒定?A级能力训练题1.滚子链标记:08A-1×100表示。
2.在机械传动中,理论上能保证瞬时传动比为常数的是______。
能缓冲减振,并能起到过载安全保护作用的是______。
(1)带传动(2)链传动(3)齿轮传动3.链传动与带传动相比较,其优点是______。
与齿轮传动相比,其重要优点是______。
(1)寿命长(2)可用于中心距较大的场合(3)安装精度要求不高(4)平稳无噪音、能保持准确的传动比4.链轮的节圆是______所构成的圆。
链条的基本参数是______。
(1)齿廓曲率中心,销轴直径(2)销轴中心,销轴长度(3)齿高中点,链板厚度(4)销轴中心,节距5.套筒滚子链中,滚子的作用是______ 。
(1)缓和冲击(2)减轻套筒与轮齿间的磨损(3)提高链的破坏载荷(4)保证链条与轮齿间的良好啮合6.由于受到链条在小链轮上的包角不能太小的限制,因而在一般链速下,链传动的传动比i______。
(1)≤6 (2)≤8 (3)≤10 (4)≤127.链传动的中心距过小的缺点是______。
(1)链条工作颤动、运行不平稳(2)链条运动不均匀性和冲击作用增强(3)容易发生“脱链”现象(4)链条的磨损快、小链轮上包角小8.链传动瞬时传动比也是常数必须具备的条件:链传动的传动比______。
(1)i=1 (2)i>1 (3)i<19.链条中应尽量避免使用过渡链节,所以在一般情况下最好不用奇数链节。
这主要是因为______ 。



外链板分别用过盈配合(压配)固联,使内、外链板 可相对回转。
为减轻重量、制成“8”字形,亦有弯板。
这样质量小,惯性小,具有等强度。
两销轴之间的中心距称为节距,用P 表示。
链条的节距越大,销轴的直径也可以做得越大, 链条的强度就越大,传动能力越强。
节距P 是链传动外链片 销轴 滚子 套筒 内链片d1教学目地:1了解链传动的特点、适用场合2 了解链传动的运动特性3 掌握链传动的设计计算方法 4熟悉链传动使用、维护方法教学重点:1链传动的运动特性2链传动的设计计算教学难点:1链传动的运动特性2链传动的设计计算第八章链传动8.1链传动的特点和应用8.1.1链传动结构和类型链传动由两轴平行的大、小链轮和链条组成。
链传动与带传动有相似之处:链轮齿与链条的链 节啮合,其中链条相当于带传动中的挠性带,但又不是靠摩擦力传动,而是靠链轮齿和链条之间的 啮合来传动。
因此,链传动是一种具有中间挠性 件的啮合传动。
链的种类繁多,按用途不同,链可分为:传 动链、起重链和输送链三类。
在一般机械传动装置中, 常用链传动,根据 结构的不同,传动链又可分为:套筒链、滚子链、 弯板链和齿形链等等。
在链条的生产和应用中传 动用短节距精密滚子链占有支配地位8.1.2链传动的特点和应用主要优点:与摩擦型带传动相比,均传动比),传动效率较高(润滑良好的链传动的效率约为97^98%);又因链条不需要象带那样张得很紧,所以作用在轴上的压轴力较小;在同样条件下,链传动的结构较紧凑;同时链传动能在温 度较高、有水或油等恶劣环境下工作。
与齿轮传动相比,链传动易于安装,成本低廉;在远距离传 动时,结构更显轻便。
主要缺点:运转时不能保持恒定传动比,传动的平稳性差;工作时冲击和噪音较大;磨损后易 发生跳齿;只能用于平行轴间的传动。
链传动主要用在要求工作可靠,且两轴相距较远,以及其他不宜采用齿轮传动的场合,且工作条 件恶劣等,如农业机械、建筑机械、石油机械、采矿、起重、金属切削机床、摩托车、自行车等。
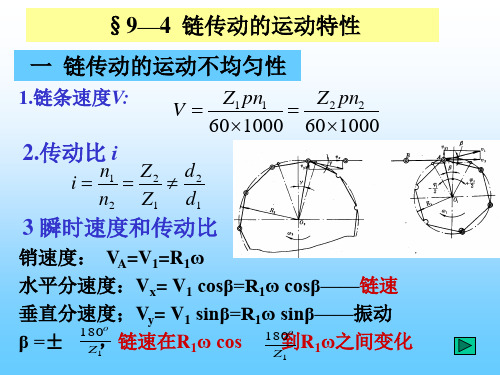
一、链传动的运动不均匀性const z z n n i ===1221平均1 平均传动比平均i 2 瞬时传动比瞬时
i 设:主动边处于水平位置,主动轮上A 点速度11ωr v A =⎩⎨⎧====上下链速
水平链速 sin sin ' cos cos 1111βωββωβr v v r v v v A A
A 均匀性
均匀性11360z =φ单个链节对应中心角:链速变化规律:'max
'max min
max min 11 0 ' 20 2 v v v v v v v -−→−−→−−→−−→−-−→−−→−+:铅垂速度:水平速度:销轴位置角ϕϕ
β(由几何关系)
高速时选小节距链。
速度波动大,角的变化范围越大,小)大、大(不恒定,同周期波动
与水平链速从动轮角速度变化
链速对应一个链节周期即使结论:瞬时 ,)3()2(,)1(121z p i v C φωω=β
γωωγωβωcos cos cos cos 12212211r r i r r v ====瞬时
瞬时传动比:瞬时链速:均匀性
二、链传动的动载荷
N dt
v 1d M F d =1 链条速度波动引起动载
2 从动轮角速度波动引起动载
N dt 222ωd r J F d =3 链条与链轮绕入冲击动能
J mv 2120=E kg) (紧边链条质量-M )
(上的等效转动惯量从动系统转化到从动轴-J 的动载荷(m-链节质量)
链传动的多边形效应—链传动的固有属性多边形效应:传动中,链与轮啮合呈正多边形运动,导致
链速及瞬时传动比周期变化,引起动载、冲击。
影响因素:p 大、z 少、v 大,多边形效应明显的动载荷。