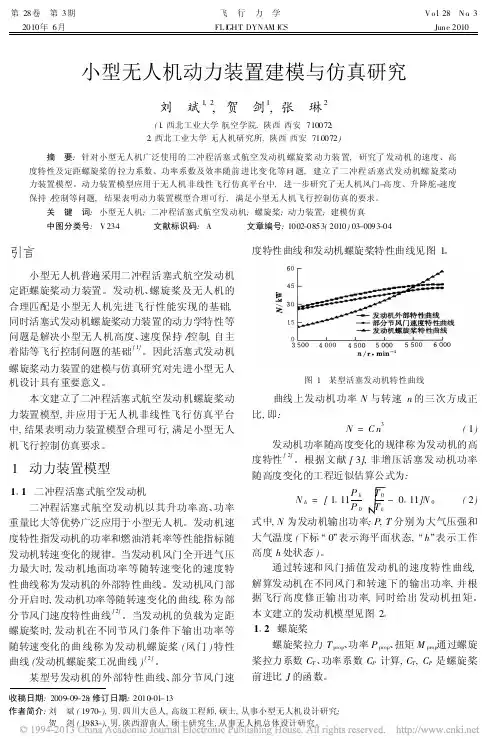
小型无人机动力装置建模与仿真研究_刘斌
- 格式:pdf
- 大小:505.56 KB
- 文档页数:4
无人机系统的动力学建模与控制方法研究近年来,无人机技术的快速发展使其在各个领域得到了广泛的应用,如军事侦察、搜救行动、环境监测等。
无人机的成功运行离不开可靠的动力学建模和控制方法。
本文将探讨无人机系统的动力学建模与控制方法的研究进展。
一、动力学建模的必要性无人机是一种复杂的系统,它包括了多种不同的部件和模块,如飞行器本身、传感器、摄像机等。
为了实现无人机的高效运行,需要对其动力学进行建模。
动力学建模的目的是描述无人机的运动规律及相关的物理现象,从而为后续控制方法的设计提供基础。
动力学建模的过程中要考虑飞行器本身的力学特性,以及外部环境的影响因素。
同时,动力学建模需要考虑到不同飞行器的特点和用途,以便应用在不同领域。
在动力学建模过程中,通常会使用数学模型和仿真方法,如质点模型、刚体模型、欧拉角等。
这些模型可准确地描述无人机的运动状态,为后续的控制方法提供理论基础。
二、无人机系统的控制方法无人机的控制方法可以分为两大类,即开环控制和闭环控制。
开环控制是指根据飞行器的预期运动轨迹来指定控制指令,而闭环控制是根据实际测量的状态信息进行控制,使无人机的运动符合期望的要求。
近年来,学者们提出了许多不同的控制方法来提高无人机的性能和稳定性。
常见的控制方法包括PID控制、模糊控制、自适应控制等。
PID控制是一种基于误差的控制方法,通过调节比例、积分和微分三个控制参数来实现控制过程的稳定。
模糊控制是一种基于经验的控制方法,它将模糊逻辑和模糊推理应用于控制系统中,以适应不确定性和非线性的特点。
自适应控制是一种可以根据实际情况调整控制策略的方法,通过感知系统的变化并相应地改变控制参数来提高控制系统的性能。
三、研究热点和挑战当前,无人机系统的动力学建模与控制方法研究面临着一些热点和挑战。
首先,无人机的多样性和复杂性导致了动力学建模和控制方法的多样性。
不同的无人机系统有不同的动力学特点和控制需求,因此需要针对不同应用场景来设计相应的控制方法。
无人机系统的动力学建模与优化无人机(UAV)作为一种重要的航空器,已经广泛应用于军事、民用、商业等各个领域。
在无人机的设计与控制过程中,动力学建模与优化是一个重要的环节。
本文将探讨无人机系统的动力学建模与优化,并介绍一些相关的方法和技术。
一、动力学建模动力学建模是研究无人机运动规律和力学行为的重要方法。
它能够描述无人机在不同工况下的运动特性,为无人机的控制系统设计和优化提供基础。
1. 飞行动力学建模飞行动力学建模主要涉及无人机的飞行力学特性和附件动力学行为。
其基础是通过物理力学原理建立无人机的运动方程,通过计算机仿真验证模型的准确性。
2. 传感器建模在无人机系统中,传感器的建模对于无人机的控制和导航至关重要。
传感器可以包括GPS、惯性测量单元(IMU)、摄像头等各种类型。
通过对传感器的特性进行建模,可以提高无人机系统的控制精度和稳定性。
3. 动力系统建模动力系统建模是指对无人机的动力装置进行建模和分析。
通常包括无人机的发动机、电机和蓄电池等。
通过建立准确的动力系统数学模型,可以提高无人机的动力性能和航程。
二、动力学优化动力学优化是指通过调整无人机系统的参数和控制策略,以达到性能最优化的目标。
它可以包括以下几个方面的优化。
1. 路径规划与导航路径规划和导航是无人机系统中的关键问题。
通过优化路径规划算法和导航控制策略,可以实现无人机系统在复杂环境中的自主飞行和任务执行。
2. 控制系统优化无人机的控制系统优化是指对无人机控制算法和控制参数进行调整和改进,以提高无人机的控制性能和稳定性。
常用的方法有PID控制器的参数优化和自适应控制策略的设计。
3. 能源管理与优化能源管理与优化是指对无人机动力系统的能源消耗进行优化。
通过调整无人机的飞行速度、飞行高度以及功率分配策略,可以最大程度地延长无人机的续航时间。
三、相关方法和技术在无人机系统的动力学建模与优化中,有一些相关的方法和技术被广泛使用。
1. 系统辨识方法系统辨识是一种通过实验数据推测和建立数学模型的方法。
飞行器动力系统的动态建模与仿真在现代航空航天领域,飞行器动力系统的性能和可靠性至关重要。
为了更好地设计、优化和预测飞行器动力系统的工作特性,动态建模与仿真是一种不可或缺的工具。
飞行器动力系统是一个复杂的多学科交叉领域,涵盖了热力学、流体力学、燃烧学、机械工程等多个学科的知识。
其主要组成部分包括发动机、燃料供应系统、进气系统、排气系统等。
发动机作为核心部件,又可以分为多种类型,如喷气式发动机、涡轮螺旋桨发动机、火箭发动机等,每种类型都有其独特的工作原理和性能特点。
动态建模是对飞行器动力系统的物理过程和行为进行数学描述的过程。
通过建立精确的数学模型,可以捕捉到系统中各种参数之间的关系,以及它们随时间的变化规律。
例如,对于喷气式发动机,建模需要考虑空气的吸入、压缩、燃烧、膨胀和排出等过程。
在建模过程中,需要运用各种数学方法和理论,如微分方程、偏微分方程、数值分析等。
在建立模型时,首先要对系统进行合理的简化和假设。
这是因为实际的飞行器动力系统非常复杂,如果不进行简化,建模将变得极其困难甚至无法实现。
然而,简化也需要谨慎进行,以确保模型能够准确反映系统的主要特性和关键行为。
例如,在建模燃烧过程时,可以假设燃烧是均匀的、完全的,但同时需要考虑实际中可能存在的燃烧不完全、火焰传播速度等因素的影响。
模型的参数确定是建模过程中的一个关键环节。
这些参数通常包括物理常数、几何尺寸、材料特性等。
获取参数的方法有多种,如实验测量、理论计算、参考已有文献和数据等。
实验测量可以提供最直接和准确的参数值,但往往受到实验条件和设备的限制。
理论计算则基于物理定律和数学公式,可以在一定程度上预测参数值,但计算过程可能较为复杂。
参考已有文献和数据可以节省时间和成本,但需要对数据的可靠性和适用性进行评估。
建立好模型后,接下来就是进行仿真。
仿真就是利用计算机软件对建立的模型进行数值求解,以得到系统在不同工况下的性能参数和输出结果。
仿真软件通常包括专业的航空航天仿真工具,如MATLAB/Simulink、ANSYS Fluent 等。
小型无人直升机姿态非线性鲁棒控制设计鲜斌;古训;刘祥;王福;刘世博【期刊名称】《控制理论与应用》【年(卷),期】2014(031)004【摘要】本文针对小型无人直升机的姿态控制问题,通过系统参数辨识,获得了较为准确的无人直升机姿态动力学模型.并根据无人直升机的动态特性,设计了基于神经网络前馈与滑模控制的非线性鲁棒姿态控制律,该控制律对直升机模型的先验知识要求较低.利用基于Lyapunov的分析方法证明,设计的控制律能够实现对无人直升机姿态角的半全局指数收敛镇定控制,并能确保闭环系统的稳定性.基于姿态飞行控制实验平台的实时飞行控制实验结果表明,提出的控制设计取得了很好的姿态控制效果,并对系统不确定性和外界风扰动具有较好的鲁棒性.【总页数】8页(P409-416)【作者】鲜斌;古训;刘祥;王福;刘世博【作者单位】天津大学电气与自动化工程学院,机器人与自主系统研究所,天津市过程检测与控制重点实验室,天津300072;天津大学电气与自动化工程学院,机器人与自主系统研究所,天津市过程检测与控制重点实验室,天津300072;天津大学电气与自动化工程学院,机器人与自主系统研究所,天津市过程检测与控制重点实验室,天津300072;天津大学电气与自动化工程学院,机器人与自主系统研究所,天津市过程检测与控制重点实验室,天津300072;天津大学电气与自动化工程学院,机器人与自主系统研究所,天津市过程检测与控制重点实验室,天津300072【正文语种】中文【中图分类】TP273【相关文献】1.小型无人直升机的广义Hamilton非线性鲁棒控制 [J], 李果;赵建中2.无人直升机非线性鲁棒控制器设计及仿真 [J], 陈亚锋;薛明旭;3.无人直升机非线性鲁棒控制器设计及仿真 [J], 李之果;陈亚锋;高亚瑞4.基于神经网络前馈的无人直升机非线性鲁棒控制设计 [J], 鲜斌;郑国周;刘世博5.基于LMI的无人直升机姿态解耦鲁棒控制器设计 [J], 王勇;郭润夏;谈斌因版权原因,仅展示原文概要,查看原文内容请购买。
微小型无人机电机驱动设计及飞行姿态仿真的开题报告一、研究背景及意义随着无人机技术的迅速发展以及应用需求的不断增加,微小型无人机已经成为当前研究的热点领域。
而微小型无人机的设计与研究涉及到多个学科知识,其中包括机械设计、电子电路、控制系统理论等多个方面。
电机驱动作为无人机的重要组成部分,对于微小型无人机的性能以及安全性等方面具有重要影响。
因此,微小型无人机电机驱动设计及飞行姿态仿真研究显得尤为重要。
二、研究内容1. 微小型无人机电机驱动技术研究。
2. 不同电机驱动技术的分析比较和优化选择。
3. 基于MATLAB/Simulink进行微小型无人机飞行姿态仿真研究。
4. 分析并优化飞行控制算法,提高微小型无人机的飞行性能。
三、研究方法本课题将通过文献资料调研、实验仿真、模型建立、控制算法设计等方法展开研究。
四、预期成果1. 理论上,将对微小型无人机电机驱动技术进行全面研究,并选取适当的电机驱动技术,提高微小型无人机的电机驱动性能。
2. 实际上,通过仿真实验,探索微小型无人机在不同控制算法下的飞行姿态变化,优化飞行控制算法,提高微小型无人机的飞行性能。
3. 数据上,本研究将得到微小型无人机电机驱动、飞行姿态仿真及优化算法等方面的有效数据支持。
五、研究进度安排第一年:1. 综述微小型无人机电机驱动技术的相关文献,并分析比较各种电机驱动技术的优缺点,选取适当的电机驱动技术。
2. 建立微小型无人机的仿真平台,并进行基本的飞行姿态仿真实验,并对仿真结果进行分析。
第二年:1. 分析综合微小型无人机的控制策略,并提出新的改进方案,实现微小型无人机的飞行控制及优化。
2. 对微小型无人机的飞行控制算法及优化方案进行仿真实验,并对仿真结果进行分析比较。
第三年:1. 实验验证各种改进方案的有效性,并对微小型无人机的电机驱动、飞行姿态、仿真及控制算法进行综合分析与评价。
2. 撰写论文,准备相关期刊会议的投稿。
六、参考文献1. 魏炜,曾万松,樊云,等. 微型无人机马达冷却系统设计及性能研究[J]. 现代制造工程, 2018, 37(06): 23-25+29.2. 胡雨航,李庆荣,王玲,等. 基于PID算法的微型飞行器自稳定控制方法[J]. 湖南大学学报(自然科学版), 2018, 45(10): 121-130.3. 许斌,王冬梅,薛霄,等. 微型无人机多旋翼飞行控制系统设计[J]. 电光与控制, 2018, 25(08): 73-75+89.4. 孔祥辉,高鹏程,杨庆良,等. 微型无人机姿态控制方法综述[J]. 现代电子技术, 2017, 40(13): 18-23.5. 林浩,赵琳,段克强,等. 微型无人机飞行姿态控制研究[J]. 安徽建筑大学学报(自然科学版), 2019, 21(03): 15-18+24.。
无人机模型设计与仿真研究随着科技的不断进步和发展,无人机已经成为了现代航空领域中的重要成员。
无人机不仅具有比传统有人飞行器更高的使用效率和安全性,而且其灵活性和敏捷性也是传统有人飞行器无法媲美的。
因此,在无人机的设计和研究中,更加重要的是嵌入大量的仿真和模型设计,以便更好地了解其工作原理和行为表现,从而在实际制造和应用中更加高效地发挥其优势。
无人机模型设计在无人机模型设计的过程中,最关键的是为其确定适当的结构,以能够适应不同使用场景的需求。
例如,固定翼结构的无人机适用于需要长时间巡航的场合,而四转子的结构则更适合进行快速的起降等操作。
此外,设计者还需要为无人机确定其所需的各种控制系统和传感器,以确保其具有足够的稳定性和可靠性。
此外,为了提高无人机的实用性和精度,还需要为其进行更加精细的模型设计。
例如,在研究无人机姿态控制的过程中,常常需要建立其动力学和控制方程的模型,并通过模拟各种操作来测试其性能和稳定性。
在这个过程中,使用这个过程中常常需要使用到各种仿真软件和工具,如MATLAB、Simulink以及CoppeliaSim等,以便更好地模拟和测试无人机的性能。
无人机仿真研究作为无人机设计的重要一环,无人机仿真研究起到的作用同样也是不可或缺的。
在仿真研究中,研究者会建立各种无人机操作的场景,并模拟各种不同的操作行为,以更加深入地了解无人机的行为表现和限制。
例如,在研究无人机的路径规划和自主导航方面,常常需要使用到纯Pursuit算法等各种路径规划算法,并通过仿真来测试其有效性和精度。
在这个过程中,研究者可以通过修改无人机模型和环境参数等方式进行不同的测试,以便更加深入地了解无人机在实际操作过程中的行为和性能。
总体而言,无人机模型设计和仿真研究是现代航空工业中非常重要的一环,对于更好地了解无人机的工作原理和性能具有非常重要的意义。
未来,随着无人机技术的不断发展和进步,无人机模型设计和仿真研究也将变得越来越重要和精细,从而更好地推动无人机技术的发展和应用。
姓名:刘斌
院系:航空学院
职称:高工硕士导师
当前位置:首页 >学院导师
导师简介
个人简历
刘斌,男,1970年生,高级工程师。
1992年西北工业大学飞机系毕业。
在西工业大学无人机研究所工作十多年来,参加了多个国家重点无人机型号的研制和研项目等的研究工作。
在型号研制与项目研究中担任过型号副总设计师、型号主设计师、项目负责人等技术职务。
撰写技术报告,研究报告数十篇,公开发表论文篇。
获科工委科技进步三等奖1项,实用新型专利2项。
指导学生参加中国空中机人比赛和全国航空航天模型锦标赛,屡获佳绩。
主要研究兴趣:
(1)无人机总体设计
(2)无人机强度规范与飞行载荷计算
(3)无人机结构设计
(4)无人机飞行模拟训练。
军事无人系统的动力学建模与仿真分析随着科技的不断发展,军事领域的自动化技术也在不断革新。
军事无人系统作为目前最为先进和广泛应用的一种技术手段,正逐渐成为现代军事作战的重要组成部分。
动力学建模与仿真分析是研究军事无人系统性能的重要工具,通过对系统的力学行为进行模拟和分析,可以为系统优化和军事作战提供重要支持。
一、动力学建模动力学建模主要是对军事无人系统在运动过程中的力学行为进行描述和分析。
它是基于物理学和工程原理的理论模型,通过对系统的各种力和能量的定量分析,可以预测系统的运动轨迹、稳定性和响应性能等。
在动力学建模中,需要考虑的主要因素包括系统的质量、惯性矩阵、外部作用力和扭矩等。
首先,对军事无人系统的质量进行建模是非常重要的。
不同组件的质量分布以及整个系统的总质量都会对系统的力学行为产生影响。
例如,对于飞行器无人系统而言,飞行器的组件包括机翼、发动机、推进器等,每个组件的质量都需要进行精确的测量和建模。
其次,惯性矩阵是描述系统响应速度和稳定性的重要参数。
通过测量系统在不同方向上的转动惯量,可以构建惯性矩阵,并利用惯性矩阵对系统的姿态控制和稳定性分析进行模拟。
最后,在动力学建模中,需要考虑外部作用力和扭矩对系统的影响。
外部作用力包括重力、气动力和地面摩擦力等,外部扭矩包括风力和涡旋引起的扭矩等。
通过模拟这些外部力和扭矩的作用,可以更好地理解系统在实际环境中的动力学行为。
二、仿真分析仿真分析是基于动力学建模的研究手段,通过对建模结果进行计算和模拟,对军事无人系统的性能进行评估和优化。
仿真分析可以帮助工程师和军事研究人员预测系统的动态特性、运动轨迹和稳态响应,从而有效地指导系统设计和决策。
首先,基于动力学模型的仿真分析可以帮助提前发现潜在的问题和缺陷。
通过模拟系统在不同工况下的动力学特性,可以检测系统是否存在不稳定、振动过大或者响应迟缓等问题。
其次,仿真分析可以评估系统的性能指标。
军事无人系统的性能指标包括响应速度、稳定性和精度等。
无人机控制系统的建模与仿真研究无人机(Unmanned Aerial Vehicle,UAV)的广泛应用已经引起了全球范围内的极大关注。
无人机控制系统的建模与仿真研究是提高无人机飞行性能和安全性的重要一环。
本文将围绕无人机控制系统的建模和仿真进行探讨,通过对无人机的控制系统、建模方法以及仿真技术的研究,为无人机技术的发展提供参考和指导。
无人机控制系统是无人机飞行过程中起关键作用的一套系统,包括传感器、执行器以及飞行控制计算机等组成部分。
传感器用于获取飞行参数,执行器用于控制无人机的动作,而飞行控制计算机则负责控制和调节无人机的姿态和轨迹。
建模无人机控制系统是为了更好地理解和分析无人机的飞行特性,并为后续的控制算法设计提供基础。
在实施无人机控制系统的建模过程中,首先需要确定无人机的动力学模型。
动力学模型可以精确描述无人机在空中飞行时产生的力和力矩,包括质量、惯性、空气动力学和推力等因素。
常用的动力学模型包括刚体动力学模型和柔性动力学模型。
刚体动力学模型适用于那些刚性结构的无人机,而柔性动力学模型则适用于具有柔性结构的无人机。
建立了动力学模型后,可以进一步对无人机的控制系统进行建模。
无人机的控制系统一般包括内环控制和外环控制。
内环控制用于控制无人机的姿态,包括横滚、俯仰和偏航角度的调节。
外环控制则负责控制无人机的轨迹和导航,使其能够完成特定的任务。
在建模过程中,可以使用各种控制方法和技术,例如PID控制器、自适应控制算法等。
除了对无人机控制系统进行建模,仿真也是研究无人机控制系统的重要手段。
仿真可以在计算机上模拟无人机的飞行过程,从而对其性能和稳定性进行评估。
仿真可以模拟不同的飞行条件和环境,对控制系统的鲁棒性进行检验。
此外,仿真还可以用于研究飞行器的碰撞以及故障恢复等情况,以提高无人机的安全性。
在进行无人机控制系统的建模和仿真研究时,需要考虑以下几个关键因素。
首先是精确的传感器数据。
传感器数据的准确性对于模型的建立和仿真结果的准确性至关重要。
基于人工智能的航天器动力学建模与仿真研究人工智能(Artificial Intelligence,简称AI)作为一种强大的技术应用,正在快速渗透到各个领域。
航天器动力学建模与仿真是一个重要的研究方向,其目的是通过数学模型和仿真技术来研究航天器在运行过程中的动力学特性。
本文将讨论基于人工智能的航天器动力学建模与仿真研究。
首先,我们需要了解什么是航天器的动力学。
航天器动力学是一门研究航天器运动规律和控制策略的学科。
在研究中,我们需要考虑引力、空气阻力、推进剂消耗等因素对航天器运动的影响。
通过建立数学模型和使用仿真技术,可以模拟航天器在不同环境下的运动效果,帮助研究人员更好地理解和优化航天器的设计、控制和操作。
人工智能技术在航天器动力学建模与仿真中的应用可以大大增强研究的准确性和效率。
首先,人工智能可以帮助我们更好地分析和处理航天器运动过程中涉及的大量数据。
例如,利用机器学习算法可以从传感器数据中提取有关航天器状态的信息,如位置、速度和加速度等。
这些数据可以用于建立更准确的动力学模型,并作为仿真的初始参数。
其次,人工智能可以提供更高级的控制策略和优化算法,以实现更精确的航天器运动控制。
例如,深度强化学习算法可以学习航天器在不同环境下的最优控制策略,并根据实时反馈进行调整。
这种智能控制方法可以在不断改变的环境中适应航天器的需求,并提供更高的稳定性和安全性。
其次,人工智能可以辅助航天器设计的优化。
利用人工智能算法和大规模数据分析技术,可以对航天器的结构和材料进行优化,以提高其性能和效率。
例如,通过利用深度学习算法对航天器结构进行建模和仿真,可以帮助设计师快速评估不同设计方案的优劣,并选择最佳的设计方案。
此外,人工智能还可以提供更高效的故障诊断和预测。
通过监测和分析航天器的传感器数据,人工智能可以快速检测到潜在的故障或异常情况,并提供相应的修复建议。
这在航天器运行过程中至关重要,可以帮助降低故障率和提高可靠性。