3小型四旋翼无人机建模与控制仿真_孟佳东
- 格式:pdf
- 大小:318.74 KB
- 文档页数:5
四旋翼无人机的数学模型控制及操作原理作者:吕传庆陈琪马云波董珮璠摘要:本文对选择四旋翼无人机为研究对象,用数学建模的方法对其动力及运动状态进行分析,对所建动力学模型上进行PID算法控制,仿真结果很好模拟了真实环境下无人机的飞行姿态。
关键字:四旋翼,建模,PID算法。
引言:无人机的发展现状及未来趋势:无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机。
在军事上及民用上均有深入发展。
军事上以其体积小、重量轻、机动性好、飞行时间长和便于隐蔽为特点,适合于执行危险性大的任务,已逐渐成为新世纪军事竞争的制高点之一,随着信息时代的发展,现代信息化战争正朝着高精度,高杀伤,高重复利用,隐蔽性方面发展,无人机以其特殊优势很好适应了未来战争中提出的要求,正发挥着越来越大的作用,成为军队实现信息化作战及特种作战的有力武器。
能研制高精尖无人机的国家屈指可数,其中美国处于领先地位,作战无人机包括RQ-1捕食者”,”MQ-9“死神”(Reaper),RQ-5“猎手”等;侦察机包括RQ-4A“全球鹰”,RQ-8A“火力侦察兵”等。
美国曾在伊拉克战争,阿富汗战争中用无人机完成各种监视侦查,目标指示等任务,提供大量情报支持,表现突出,有力的减小了美军伤亡,因此无人机受到美军军事部门高度重视。
现已发展至舰载无人机x-47b。
中国无人机水平也处于世界领先水平,以能研制各种功能齐全的无人机。
如三角翼布局的暗剑无人机,和与捕食者无人机相当的翼龙、彩虹系列无人机。
其中彩虹系列无人机和翼龙系列无人机不但在本国服役,还成功出口到中东及非洲国家,例如伊拉克,埃及,阿联酋。
并在伊拉克投入到对于极端组织的打击,完成了首次实战。
在民用方面,无人机还广泛用于农业,通信救灾,地形勘探等方面。
如今互联网时代的到来,网购成为越来越多90后的选择。
无人机在快递行业局域光辉前景,无人机的发展将给快递行业带来革命性变化。
所以无人机行业的发展无论对于军队装备发展还是经济发展均具有重要意义。
目录摘 要 (I)ABSTRACT (II)第一章 绪 论 (1)§1.1课题背景 (1)§1.2国内外研究现状 (1)§1.3本课题研究的科学意义与应用前景 (2)§1.4本文的主要内容 (3)第二章 微小型四旋翼无人直升机建模 (4)§2.1引言 (4)§2.2机体构造与飞行原理 (4)§2.3旋翼空气动力学 (5)§2.3.1旋翼和桨叶的相对气流 (5)§2.3.2空气动力与力矩 (6)§2.4动力系统模型 (11)§2.5微小型四旋翼无人直升机动力学 (12)§2.6本章小结 (15)第三章 基于Backstepping的微小型四旋翼无人直升机控制 (17)§3.1引言 (17)§3.2 Backstepping方法 (17)§3.2.1 Lyapunov稳定性 (17)§3.2.2严格反馈系统 (19)§3.2.3 Backstepping算法及其稳定性证明 (19)§3.3基于Backstepping的飞行控制系统设计 (22)§3.3.1动力学模型 (22)§3.3.2飞行控制系统设计 (23)§3.3.3 Backstepping控制器设计及其稳定性分析 (24)§3.4仿真结果与分析 (29)§3.5本章小结 (32)第四章 基于ADRC的微小型四旋翼无人直升机控制 (33)§4.1引言 (33)§4.2 ADRC基本原理 (33)§4.2.1 ADRC系统结构 (34)§4.2.2 ADRC数学模型 (35)§4.2.3 ADRC收敛性分析 (38)§4.2.4 ADRC典型应用 (38)§4.3基于ADRC的飞行控制系统设计 (39)§4.3.1动力学模型 (40)§4.3.2飞行控制系统设计及其稳定性分析 (40)§4.3.3 ADRC算法及其参数整定原则 (42)§4.4仿真结果与分析 (43)§4.4.1 ADRC控制仿真结果与分析 (44)§4.4.2 PD-ADRC控制仿真结果与分析 (47)§4.5本章小结 (48)第五章 微小型四旋翼无人直升机状态估计 (49)§5.1引言 (49)§5.2 SR-UKF滤波算法 (49)§5.2.1 UT变换 (50)§5.2.2矩阵QR分解与Cholesky分解因数更新 (51)§5.2.3状态估计SR-UKF滤波算法 (51)§5.3微小型四旋翼无人直升机状态估计算法 (53)§5.3.1状态方程与量测方程 (53)§5.3.2仿真实验与分析 (54)§5.4本章小结 (56)第六章 总结与展望 (57)参考文献 (59)硕士期间发表的学术论文 (61)致 谢 (62)摘要微小型四旋翼无人直升机是一种外型新颖、性能卓越的垂直起降无人机,具有重要的军事和民用价值。
四旋翼飞行仿真器的建模及控制方法的研究的开题报告开题报告一、选题背景四旋翼无人机作为无人机中最为常见的一种类型,其应用领域十分广泛,包括但不限于:航拍、物流、救援、搜救等。
为了提高四旋翼无人机的飞行性能和安全性,需要对四旋翼无人机进行控制设计和仿真研究。
本文针对四旋翼无人机的飞行控制问题展开研究,探讨四旋翼无人机的建模与控制方法,以提高其飞行能力和稳定性。
二、研究内容1.四旋翼无人机的建模首先,需要对四旋翼无人机进行建模,抽象出合适的数学模型,建立其动力学关系式,同时选取合适的坐标系和传感器测量参数。
在建模过程中,需要考虑到四旋翼无人机的结构、电机和电调参数、传感器和控制器等综合因素,得到能够描述四旋翼无人机运动规律的数学模型。
2.四旋翼无人机的控制方法研究针对四旋翼无人机进行控制设计,探讨多种控制方法,包括PID控制、自适应控制、模糊控制等,根据四旋翼无人机的实际特点和要求,选择合适的控制方法。
同时,基于所选的控制方法,设计合适的控制算法,对四旋翼无人机进行模拟仿真,考察控制方法对四旋翼飞行的影响。
3.四旋翼无人机的仿真平台创建四旋翼无人机的仿真平台,通过建模和控制方法设计的仿真实验和模拟简化实验,验证仿真模型的准确性,研究不同控制方法的效果。
同时,从仿真中,可以得到更加详细的实验数据,并对其进行分析和处理,得出更有价值的结论。
三、研究意义本文的研究将有助于优化四旋翼无人机的飞控系统,提高飞行控制精度和稳定性,进一步提升飞行安全性,同时推动无人机技术的发展。
同时,基于该研究成果,还可以进一步对其他无人机类型进行研究,为无人机控制和应用提供更加详尽的指导和理论基础。
四、研究方法和步骤1.文献调研和资料收集:查阅相关文献和资料,掌握四旋翼无人机的基本原理、控制方法和应用领域。
2.建模与控制方法的设计:根据所学知识,对四旋翼无人机建立数学模型,探讨控制方法和算法,选择合适的控制方案。
3.仿真程序开发:基于四旋翼无人机的数学模型和控制方法,开发相应的仿真程序,进行模拟实验。
四旋翼无人机控制系统仿真设计摘要:随着科学技术的发展,我国的四旋翼无人机技术有了很大进展。
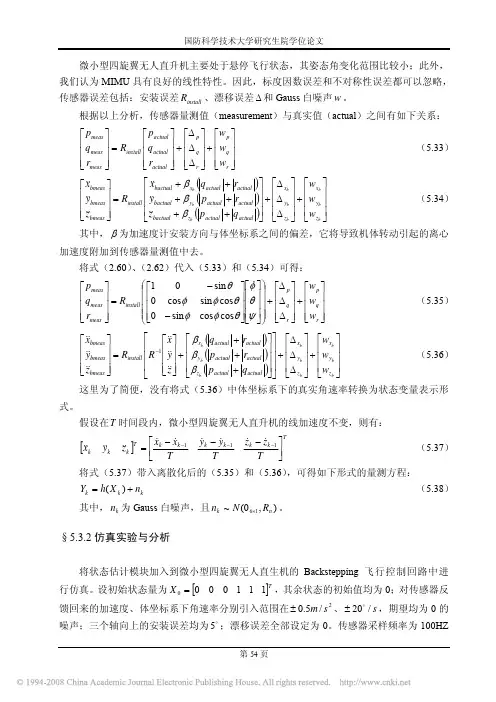
四旋翼无人机是一种性能优越的垂直起降无人飞行器,能够实现悬停、低速飞行、垂直起降等功能,在军事和民用方面具有重要价值;针对四旋翼无人机的控制系统设计问题,首先分析介绍了四旋翼无人机飞行原理,对其建立动力学模型和运动学模型,然后进行了基于PID控制的控制系统设计,在进行无人机控制系统仿真实现;能够有效地实现四旋翼无人机的姿态控制、轨迹控制,具有良好的控制精度与响应速度。
关键词:四旋翼无人机;系统建模;控制系统设计引言四旋翼无人机飞行控制问题的难点,主要有以下3个方面:1)建立机体准确的动力学模型非常困难,飞行过程中,系统会同时受到多种干扰的影响(如风、地磁和机械的剧烈振动等),因此,精确有效的动力学模型很难建立;2)飞行器控制系统的设计非常困难,小型四旋翼无人直升机具有6个自由度,而只有4个输入量的欠驱动系统,具有不稳定、欠驱动、强耦合、非线性等特性,因此加大了控制系统的设计难度;3)将飞行器姿态信息作为状态反馈量从而实现自主飞行控制是非常困难的。
能否成功解决这3个问题,是实现小型四旋翼无人机自主飞行控制的关键。
本系统以STM32F103C8为主控芯片,通过无线射频模块nRF2401向主控芯片发送起飞、悬停及降落等命令,当其收到命令后,主控芯片通过提取HC-SR04和MPU-6050的信号,利用四元数姿态解算法得出飞行器当前的状态。
1飞行原理四旋翼无人机是一个具有强耦合特性的被控对象,一个旋翼的转速改变将引起最少3个方向上的运动。
当按照不同的策略对旋翼电机转速进行调节时,机身的受力平衡会被打破,使得无人机姿态改变,进而产生相应的运动。
四旋翼无人机在空间中具备的4种基本运动状态。
1)垂向运动:同时增加4个电机的输出功率,旋翼转速增加,总升力增大,四旋翼无人机便离地垂直上升;反之,同时减小4个电机的输出功率,四旋翼无人机则垂直下降,直至平稳落地,实现了无人机的垂直运动。

四旋翼飞行器飞行控制系统研究与仿真一、引言:随着无人机技术的发展,四旋翼飞行器作为一种重要的无人机类型,在军事、民用和工业领域中得到了广泛应用。
四旋翼飞行器的飞行控制系统是实现其稳定飞行和精确操控的关键。
本文将对四旋翼飞行器的飞行控制系统进行研究与仿真。
二、四旋翼飞行器飞行控制系统的功能和组成:1.嵌入式飞控系统:嵌入式飞控系统是飞行控制系统的核心,集成了飞行姿态估计、姿态控制和飞行模式切换等功能模块。
它通过接受传感器系统获取的飞行状态信息,计算出合适的控制指令,并通过执行器系统实施控制。
2.传感器系统:传感器系统用于获取飞行器的状态信息,如加速度、角速度、姿态等。
常用的传感器包括加速度计、陀螺仪、磁力计和气压计等。
3.执行器系统:执行器系统用于根据嵌入式飞控系统计算出的控制指令来控制飞行器的运动。
常用的执行器包括电机、螺旋桨等。
4.遥控器系统:遥控器系统用于远程操控飞行器的飞行和动作。
通过遥控器系统,飞行员可以对飞行器进行起飞、降落、飞行方向和高度的调整。
三、四旋翼飞行器飞行控制系统的研究内容和方法:1.飞行姿态控制:飞行姿态控制是四旋翼飞行器飞行控制系统中的核心问题之一、该问题的研究内容包括姿态估计和姿态控制两个方面。
姿态估计:姿态估计是指通过传感器获取的飞行状态信息,推导出飞行器的姿态信息。
常见的姿态估计方法有卡尔曼滤波器和互补滤波器等。
姿态控制:姿态控制是指根据飞行器的姿态信息,计算合适的控制指令来控制飞行器的姿态。
常见的姿态控制方法有PID控制器和模型预测控制器等。
2.位置和轨迹控制:位置和轨迹控制是四旋翼飞行器飞行控制系统中的另一个重要问题。
该问题的研究内容包括位置估计和位置控制两个方面。
位置估计:位置估计是指通过传感器获取的飞行状态信息,推导出飞行器的位置信息。
常见的位置估计方法有GPS和惯性导航系统等。
位置控制:位置控制是指根据飞行器的位置信息,计算合适的控制指令来控制飞行器的位置。
四旋翼无人机设与滑模控制仿真————————————————————————————————作者:————————————————————————————————日期:四旋翼无人机设计与滑模控制仿真-电气论文四旋翼无人机设计与滑模控制仿真尤元1,李闻先2(1.长春工业大学,吉林长春130012;2.中国科学院长春光学精密机械与物理研究所,吉林长春130033)摘要:随着近些年自然灾害的频繁发生,四旋翼飞行器搜救设备得到越来越广泛的应用。
首先介绍四旋翼飞行系统的总体设计架构,然后针对地面坐标系与集体坐标系建立了四轴飞行器的动态模型,同时为得到良好的响应速度、控制稳定度与鲁棒性,应用滑模变结构控制理论设计了飞行器的控制算法。
最后通过仿真数据对相同条件下的PID控制器与该控制器对比,证明该控制器的强鲁棒性和控制稳定性满足项目任务需求。
关键词:四旋翼飞行器;滑模变结构控制;PID控制;建模仿真中图分类号:TN964?34;V249.1 文献标识码:A 文章编号:1004?373X (2015)15?0080?04收稿日期:2015?02?09基金项目:吉林省重点科技攻关项目(20140204044SF)0 引言四旋翼飞行器是有四个旋翼呈刚性十字结构的一种飞行装置,它通过控制四个旋翼的速度来实现垂直起降、自主悬停以及姿态控制等动作。
因其具有适应复杂环境的能力、可低速飞行、机体结构简单、制造成本低等优点,可广泛应用于军事侦察、自然灾害搜救遥感、高空拍摄等军用与民用领域。
随着新型材料的应用、微处理器技术的进步、传感器工艺的提高,电池续航能力的提升以及动力装置的改善,四旋翼无人机成了近几年来国内外研究的焦点[1]。
四旋翼飞行器是一个非线性、强耦合、欠驱动、时变的被控对象,其独特的结构布局和飞行控制的干扰敏感特性使其控制系统的设计变得较为复杂[2]。
近些年国内外学者对该飞行器的控制模型做了大量的研究工作,文献[3] 将控制系统分为几个独立的通道,分别设计相应的PID 控制器进行姿态与悬停控制,文献[4]采用反步法,通过构造合适的Lyapunov函数求出控制律进行姿态与位置控制,得到了良好的跟踪性与快速的调整时间。
系统的仿真模型,以对ADRC 飞行控制器的控制性能进行验证。
下面,将首先分析ADRC 的控制性能;然后,考察θ−x 和φ−y 通道所采用的PD-ADRC 双闭环控制器的性能。
§4.4.1 ADRC 控制仿真结果与分析系统(4.30)~(4.31)的直接驱动部分都采用了ADRC 控制器。
应用ADRC 的一大难点在于其参数的调节,需要根据§4.3.3给出的原则进行整定。
选取控制周期001.0=h ,则TD 的快速因子100000=r ,滤波因子h h 100=;ESO 的六个参数选取为§4.3.3中的推荐值;NLSEF 的参数整定结果见表4.1。
表4.1 NLSEF 参数整定结果 参数\通道 zΨ θ Φ 1β 40067 130 120 2β380 23 90 85 假设飞行器的初始高度为0,偏航角为D 60,俯仰角为D 30,横滚角为D 30−;控制目标是让飞行器在高度为m 1位置,实现姿态增稳控制;为了检验控制器的鲁棒性,对状态反馈变量添加了5%的高斯白噪声;另外,还在s 5、s 9和s 13时刻,分别考虑了三个姿态角发生突变的情况。
(a)(b)(c)图4.4 基于ADRC 的姿态增稳和飞行高度控制仿真曲线从图4.4可以看到,在ADRC 控制器的控制之下,飞行器在s 1时间内就可以完成调整,实现姿态增稳和飞行高度控制。
另外,对于传感器噪声和状态突变,ADRC 具有良好的鲁棒性来克服其影响。
此外,由图(c)还可以看到,飞行器发生俯仰和横滚转动时,飞行高度均会受到影响。
接下来,将分别通过z 通道TD 、θ通道ESO 的输出曲线来说明ADRC 是如何“安排过渡过程”和进行“扰动估计”的,以进一步分析其性能。
(a)(b)图4.5 z 通道TD 安排过渡过程由图4.5可以看到,TD 在输入信号发生阶跃跳变的时候,安排了一个“过渡过程”,其输出1v 能快速而又无超调地跟踪阶跃输入信号d z ,2v 则是d z 的广义微分。
四旋翼机器人的轨迹跟踪控制方法建模与仿真研究四旋翼机器人是一种具有广泛应用前景的飞行器,其独特的飞行特性使得其在航拍、巡检、搜救等领域有着重要的作用。
然而,要实现四旋翼机器人的精确控制,需要研究一种轨迹跟踪控制方法。
本文旨在研究和仿真四旋翼机器人的轨迹跟踪控制方法的建模与仿真。
首先,对于四旋翼机器人的轨迹跟踪控制,需要建立其数学模型。
四旋翼机器人的运动方程可以表示为力学平衡和动力平衡方程,通过对其动力学进行建模,可以得到四旋翼机器人的运动方程。
在此基础上,可以使用控制理论中的方法,如PID控制器、模糊控制器等,来设计四旋翼机器人的控制器。
通过建立四旋翼机器人的数学模型,可以为后续的仿真研究提供基础。
其次,本文使用MATLAB/Simulink软件进行仿真研究。
通过建立四旋翼机器人的数学模型,可以在Simulink中进行仿真。
在仿真过程中,可以设定四旋翼机器人的起始位置和目标轨迹,然后通过控制器对四旋翼机器人进行控制,使其按照设定的轨迹进行飞行。
通过仿真研究,可以验证所设计的控制器在轨迹跟踪方面的性能。
最后,通过分析仿真结果,可以评估所设计的轨迹跟踪控制方法的性能。
通过比较四旋翼机器人实际飞行轨迹和设定的目标轨迹之间的差异,可以评估轨迹跟踪控制方法的准确性。
同时,还可以分析四旋翼机器人在不同飞行速度和外部干扰下的轨迹跟踪性能,以评估其鲁棒性。
综上所述,本文研究了四旋翼机器人的轨迹跟踪控制方法的建模与仿真。
通过建立四旋翼机器人的数学模型,并使用MATLAB/Simulink进行仿真研究,可以评估所设计的控制器在轨迹跟踪方面的性能。
这对于提高四旋翼机器人的飞行控制精度和稳定性具有重要意义,为其在航拍、巡检、搜救等领域的应用提供了理论和技术支持。
小型四旋翼无人机姿态测量仿真研究
楚仕彬;袁亮
【期刊名称】《计算机仿真》
【年(卷),期】2015(32)2
【摘要】研究无人机姿态流通量优化问题,由于低成本小型四旋翼无人机中所使用的姿态测量传感器存在精度低、噪声大的缺点,并且易受温度等环境的影响,不能准确的测量出无人机的姿态,特别是在无人机加速飞行过程中,姿态误差会很快累积扩大,不能长时间加速飞行.为提高无人机姿态测量精度,提出设计由陀螺仪、加速度计和磁强计组成的姿态测量系统,通过计算加速度计信任度,并利用卡尔曼滤波的方法实现对误差四元数的估计,从而得到无人机的姿态角度.实验结果表明,该卡尔曼滤波能够在低动态的飞行环境中准确测量出无人机姿态角度,并能克服以往无人机不能长时间加速飞行的缺点,证明卡尔曼滤波被成功应用于四旋翼无人机姿态测量优化提供了科学依据.
【总页数】7页(P67-73)
【作者】楚仕彬;袁亮
【作者单位】新疆大学机械工程学院,新疆乌鲁木齐830000;新疆大学机械工程学院,新疆乌鲁木齐830000
【正文语种】中文
【中图分类】V271.4
【相关文献】
1.小型四旋翼无人机建模与控制仿真 [J], 孟佳东;赵志刚
2.微小型四旋翼无人机研究进展及关键技术浅析 [J], 岳基隆;张庆杰;朱华勇
3.基于IEKF的四旋翼无人机姿态测量方法研究 [J], 贺海鹏;阎妍;马良;杨万扣
4.微小型四旋翼无人机自主着陆视觉系统研究 [J], 何昱;王彪;谷世宁;徐贵力
5.基于SolidWorks的小型四旋翼无人机设计及仿真 [J], 杨学文; 马瑞阳; 李志艺因版权原因,仅展示原文概要,查看原文内容请购买。