四旋翼飞行器建模与仿真Matlab概要
- 格式:doc
- 大小:507.58 KB
- 文档页数:15
四旋翼飞行仿真器的建模及控制方法的研究的开题报告开题报告一、选题背景四旋翼无人机作为无人机中最为常见的一种类型,其应用领域十分广泛,包括但不限于:航拍、物流、救援、搜救等。
为了提高四旋翼无人机的飞行性能和安全性,需要对四旋翼无人机进行控制设计和仿真研究。
本文针对四旋翼无人机的飞行控制问题展开研究,探讨四旋翼无人机的建模与控制方法,以提高其飞行能力和稳定性。
二、研究内容1.四旋翼无人机的建模首先,需要对四旋翼无人机进行建模,抽象出合适的数学模型,建立其动力学关系式,同时选取合适的坐标系和传感器测量参数。
在建模过程中,需要考虑到四旋翼无人机的结构、电机和电调参数、传感器和控制器等综合因素,得到能够描述四旋翼无人机运动规律的数学模型。
2.四旋翼无人机的控制方法研究针对四旋翼无人机进行控制设计,探讨多种控制方法,包括PID控制、自适应控制、模糊控制等,根据四旋翼无人机的实际特点和要求,选择合适的控制方法。
同时,基于所选的控制方法,设计合适的控制算法,对四旋翼无人机进行模拟仿真,考察控制方法对四旋翼飞行的影响。
3.四旋翼无人机的仿真平台创建四旋翼无人机的仿真平台,通过建模和控制方法设计的仿真实验和模拟简化实验,验证仿真模型的准确性,研究不同控制方法的效果。
同时,从仿真中,可以得到更加详细的实验数据,并对其进行分析和处理,得出更有价值的结论。
三、研究意义本文的研究将有助于优化四旋翼无人机的飞控系统,提高飞行控制精度和稳定性,进一步提升飞行安全性,同时推动无人机技术的发展。
同时,基于该研究成果,还可以进一步对其他无人机类型进行研究,为无人机控制和应用提供更加详尽的指导和理论基础。
四、研究方法和步骤1.文献调研和资料收集:查阅相关文献和资料,掌握四旋翼无人机的基本原理、控制方法和应用领域。
2.建模与控制方法的设计:根据所学知识,对四旋翼无人机建立数学模型,探讨控制方法和算法,选择合适的控制方案。
3.仿真程序开发:基于四旋翼无人机的数学模型和控制方法,开发相应的仿真程序,进行模拟实验。

基于MATLAB的四旋翼无人机避障策略仿真摘要:为保证四旋翼无人机在飞行安全,有效完成任务,避障策略尤为重要。
本文采用人工势场法的避障方案,对经典人工势场法进行改进,使之达到所需目标。
关键词:四旋翼;人工势场;仿真一引言四旋翼无人机(下文简称四旋翼)通过控制四个电机和螺旋桨的转速来实现飞机的俯仰、偏航和滚转运动,在高海拔、低气压、多障碍的高原多山地区飞行时易避障不及时而损毁,本文基于MATLAB运用人工势场实现四旋翼避障策略仿真。
二模型建立为实现四旋翼避障策略仿真,首先建立四旋翼的数学模型,分析姿态算法。
2.1 确立坐标系四旋翼运动状态由大地平面坐标系和机体坐标系来描述。
为简化仿真,不考虑实际飞行中气流速度矢量与机体的角度关系的影响。
大地平面坐标系用于描述其相对于地面的运动状态。
在地面上选一点oe作为起飞位置,xe轴在水平面内指向某一方向,ye轴垂直于地面向下。
然后,按右手定则确定ze轴。
机体坐标系原点ob取在机体重心位置,坐标系与机体固连,xb轴在机体对称平面内指向机头。
zb轴在机体对称平面内,垂直xb轴向下。
然后,按右手定则确定yb轴。
2.2姿态表示姿态角是指机体坐标系与地面惯性坐标系之间的夹角,又称欧拉角。
机体轴与水平面之间的夹角称为俯仰角,用θ表示,机体抬头为正。
机体轴在水平面上的投影与地轴之间的夹角称为偏航角,用Ψ表示,以机头右偏为正。
四旋翼对称面绕机体轴转过的角度称为滚转角,用Φ表示,右滚为正。
本文用欧拉角法建立四旋翼的数学模型,机体旋转的角速率,与欧拉角变化率、、的关系为。
三避障策略为克服传统避障策略中飞行轨迹与斥力相反,造成算法死循环的问题,可在原有势能场基础上增加旋转向量。
根据任一障碍物都可被最小的长方体包裹的原理,设障碍物为长方体,且边的方向分别与坐标系x、y、z轴平行,故旋转向量的势能场可分为x-y平面的向量场(顺时针旋转和逆时针旋转)和y-z平面的向量场(向上旋转和向下旋转)。
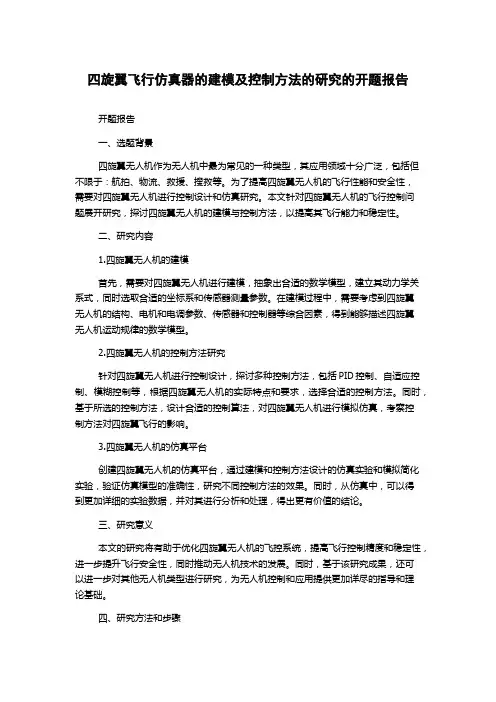
译文:四旋翼飞行器的建模与控制摘要迄今为止,大多数四旋翼空中机器人取材于飞行玩具。
虽然这样的系统可以作为原型,但是它们是还没有健全到能够服务于所有实验机器人平台。
我们已经开发出了X‐4,采用定制底盘和带有现成的电机和电池航空电子设备,是一个高度可靠的实验平台。
这个飞行器使用嵌入式姿态动力学控制器以稳定飞行。
被用来调节飞行器的姿态的控制器是一个线性的单输入单输出系统。
1 介绍直升机的一个主要难点是为了可靠的飞行,飞行器需要广泛的,和昂贵的维修费用。
无人驾驶航空飞行器(无人机)和微型飞行(MAV)也不例外。
简化飞行器的机械结构能够方便操控这些飞行器。
四旋翼是一种强大且简单的直升机,因为他们没有传统旋翼飞行器的复杂旋转倾转盘和联系。
多数四转子飞行器是根据遥控玩具的组件构建而成的。
因此,这些缺少必要的可靠性和性能的飞行器是不可能成为是切实可行的实验平台的。
1.1 目前的四旋翼平台最近几个四转子工艺已被开发用于制作玩具或进行研究。
因为市场的需求,许多关于四旋翼的研究开始了,如HMX2‐4 和Rctoys 的Draganflyer。
一成不变的,这些由塑料电机组成的飞行器的机身都带灯光。
它们是由镍镉电池或锂聚合物电池供电,并且使用基于速度反馈的mems陀螺仪。
这些四旋翼一般没有稳定的稳态。
自动稳定及使用各种硬件和控制方案被用于研究四旋翼。
例如,CSIRO的四旋翼飞行器,是一个Draganflyer的衍生物,它使用视觉伺服和惯性测量单元(IMU)来使飞行器稳定在一个固定的点上。
其他的四旋翼,包括Eidgenossische Technische Hochschule Zurich的‘OS4’,一个带有低纵横比的叶片的带传动的飞行器; CEA 的“X4‐flyer'1,一个带有四个电机和叶片的四旋翼]。
还有康奈尔大学的自治飞行器,一个采用的飞机螺旋桨的大型飞行器。
澳大利亚国立大学(ANU)的X‐4四旋翼微型飞行器旨在解决小型无人机面对的的问题。
![[旋翼,飞行器,轨迹]四旋翼飞行器飞行轨迹的仿真研究](https://uimg.taocdn.com/e5b7a5ac168884868662d681.webp)
四旋翼飞行器飞行轨迹的仿真研究四旋翼飞行器是一种体型较小、无人驾驶,能够在空中实现自主飞行并能完成一些既定动作及任务的飞行器,近年来四旋翼飞行器越来越受到国际的关注。
国际上已将四旋翼飞行器应用在军用、民用等领域,都取得了不错的成就,但是国内的研究相对较少,仍处于起步阶段。
研究四旋翼飞行器的首要任务就是研究它是如何飞行的,即进行动力学分析。
首先研究飞行器在空中如何受力飞行,如何根据电机转速来控制飞行姿态。
将飞行器在空中的几种飞行姿态分析清楚这是研究四旋翼飞行器的首要任务。
为了实现对四旋翼飞行器的有效控制,必须在准确建立了各种飞行状态下的数学模型的基础上。
论文对飞行控制算法进行了详细的研究,分析和设计了角度和位置系统PID控制算法,最后通过MATLAB仿真验证PID控制算法的可行性。
1.飞行器动力学分析及建模1.1 坐标系的建立。
四旋翼飞行器飞行参数必须在坐标系下才能进行描述。
对于飞行器来说常用的坐标系有大地坐标系和机体坐标系。
四旋翼飞行器的飞行参数主要是用来控制飞行器的稳定飞行工作,因此选取适当的坐标系可以对此研究有很大的帮助。
机体坐标系是用来描述飞行器的飞行姿态的,而大地坐标系是用来描述飞行器在飞行环境中的位置。
1.2 飞行器飞行状态。
四旋翼飞行器在飞行空间中有6个自由度,飞行器的飞行运动表现为上升或下降、空中悬停、滚转、俯仰、偏航这五种运动形式。
(1)上升或下降:要想实现四旋翼飞行器在垂直方向上的上升即同时增加四个电机的转速即可。
当电机的转速增加时,旋翼的转速随之增加,这样飞行器的升力将大于重力即为Fmg,这样飞行器就可以垂直上升了。
(2)悬停状态:升力等于重力F=mg时,飞行器在空中保持平衡,静止在某一高度。
(3)滚转状态:机身的左旋翼转速增加,同时右旋翼的转速减小,其余旋翼的转速保持不变,这样机身将沿X轴方向倾斜,产生的倾斜角即为滚转角。
(4)俯仰状态:机身的前旋翼的转速增加,或者后旋翼的转速减小,其余旋翼的转速保持不变,这样机身将沿Y轴方向倾斜,产生的倾斜角即为俯仰角。
基于MATLAB的无人机自主飞行控制系统设计与实现一、引言随着科技的不断发展,无人机技术在各个领域得到了广泛的应用,如农业、航拍、物流等。
而无人机的自主飞行控制系统是保证无人机飞行安全和稳定性的关键。
本文将介绍基于MATLAB的无人机自主飞行控制系统设计与实现。
二、无人机自主飞行控制系统概述无人机自主飞行控制系统是指通过预先设定的飞行路径和控制算法,使无人机能够在没有人为干预的情况下完成飞行任务。
该系统通常包括传感器、执行器、控制算法等组成部分。
三、MATLAB在无人机控制系统中的应用MATLAB作为一种强大的工程计算软件,在无人机控制系统中有着广泛的应用。
其强大的数学计算能力和丰富的工具箱使得设计和仿真无人机控制系统变得更加高效和便捷。
四、无人机自主飞行控制系统设计步骤1. 确定飞行任务需求在设计无人机自主飞行控制系统之前,首先需要明确飞行任务的需求,包括起飞、巡航、航点跟踪、着陆等。
2. 传感器选择与布局根据飞行任务需求选择合适的传感器,并合理布局在无人机上,常用传感器包括GPS、惯性测量单元(IMU)、气压计等。
3. 控制算法设计设计合适的控制算法是保证无人机稳定飞行的关键。
常用的控制算法包括PID控制器、模糊控制、神经网络控制等。
4. 系统建模与仿真利用MATLAB对无人机自主飞行控制系统进行建模和仿真,验证设计的控制算法在不同场景下的性能表现。
5. 硬件实现与调试将设计好的控制算法烧录到无人机飞控硬件中,并进行调试和优化,确保系统稳定性和可靠性。
五、基于MATLAB的无人机自主飞行控制系统实现案例以一架四旋翼无人机为例,通过MATLAB/Simulink搭建了其自主飞行控制系统。
通过PID控制器实现了姿态稳定控制和高度保持功能,在不同飞行任务下表现出良好的性能。
六、总结与展望本文介绍了基于MATLAB的无人机自主飞行控制系统设计与实现过程,强调了传感器选择与布局、控制算法设计、系统建模与仿真以及硬件实现与调试等关键步骤。
一、概述多四旋翼飞行器(Multirotor UAV)作为一种重要的无人飞行器系统,在军事侦察、地质勘探、紧急救援等领域具有广泛的应用前景。
对多四旋翼飞行器系统的建模方法进行研究,对提高其飞行性能和可靠性具有重要意义。
二、多四旋翼飞行器动力学建模方法1. 多物理场仿真方法多物理场仿真方法利用多种计算方法和理论,将动力学、控制和环境等多个物理场耦合在一起,进行多物理场仿真。
这种方法能够更加全面地考虑多四旋翼飞行器在不同环境下的飞行性能,并对其进行有效的建模分析。
2. 控制方程建模通过建立多四旋翼飞行器的动力学方程和控制方程,分析其在不同环境和工况下的飞行特性。
这种方法能够深入理解多四旋翼飞行器的控制机理,为其飞行性能提升和控制系统优化提供理论基础。
三、多四旋翼飞行器仿真建模方法1. 计算流体动力学仿真利用计算流体动力学仿真方法对多四旋翼飞行器进行空气动力学分析,模拟飞行器在不同飞行状态下的气动特性。
这种方法能够帮助设计人员优化飞行器的外形结构和气动布局,提高其飞行性能和稳定性。
2. 有限元分析通过有限元分析方法对多四旋翼飞行器的结构进行仿真建模,分析其在重力、风载等作用下的应力和变形情况。
这种方法可以有效评估飞行器的结构强度和刚度,为其设计和改进提供理论依据。
四、多四旋翼飞行器控制系统建模方法1. 状态空间建模采用状态空间建模方法对多四旋翼飞行器的控制系统进行建模,分析其在不同控制策略下的动态特性。
这种方法能够帮助设计人员理解飞行器的控制机理,优化控制系统结构和参数设置。
2. 控制系统仿真利用控制系统仿真软件对多四旋翼飞行器的控制系统进行仿真建模,模拟其在不同飞行状态和外部干扰下的动态响应和稳定性。
这种方法能够帮助设计人员验证控制系统的性能,并对其进行优化改进。
五、多四旋翼飞行器系统建模方法的发展趋势1. 多尺度仿真方法多尺度仿真方法能够将不同层次的建模和仿真结果进行耦合,全面分析多四旋翼飞行器系统在不同物理场和尺度下的性能。
四轴飞⾏器1.4姿态解算和Matlab实时姿态显⽰原创⽂章,欢迎转载,转载请注明出处MPU6050数据读取出来后,经过⼀个星期的努⼒,姿态解算和在matlab上的实时显⽰姿态终于完成了。
1:完成matlab的串⼝,并且实时通过波形显⽰数据2:添加RTT查看CPU使⽤率的扩展功能,MPU6050读取数据的优化3:四元素表⽰的坐标变化,四元素与欧拉⾓的关系和Madgwick的IMUupdate算法4:飞控数据采集线程和数据处理线程的安排,类似于⽣产者与消费者的关系。
先放个效果视频。
1:matlab串⼝初始化还是⽐较简单的,⽹上的资料也很多,这⾥就直接贴初始化代码了。
1 % --- Executes on button press in pb_OpenSerialPort.2 function pb_OpenSerialPort_Callback(hObject, eventdata, handles)3 % hObject handle to pb_OpenSerialPort (see GCBO)4 % eventdata reserved - to be defined in a future version of MATLAB5 % handles structure with handles and user data (see GUIDATA)6 %7global o_SerialPort;8 %______________________________________________9 %GUI全局变量101112 %---------------------串⼝初始化-----------------------13 %%%COM端⼝初始化14 int_Index_COM=get(handles.pop_SerialPort,'Value');15 string_COM=get(handles.pop_SerialPort,'String');16 string_Select_COM=string_COM{int_Index_COM};17 o_SerialPort=serial(string_Select_COM);18 %%%Baud初始化19 int_Index_Baud=get(handles.pop_BaudRate,'Value');20 string_Baud=get(handles.pop_BaudRate,'String');21 string_Select_Baud=string_Baud{int_Index_Baud};22 double_Baud=str2double(string_Select_Baud);23set(o_SerialPort,'BaudRate',double_Baud);24 %%%设置数据长度25 int_Index_DataBit=get(handles.pop_DataBit,'Value');26 string_DataBit=get(handles.pop_DataBit,'String');27 string_Select_DataBit=string_DataBit(int_Index_DataBit);28 double_DataBit=str2double(string_Select_DataBit);29set(o_SerialPort,'DataBits',double_DataBit);30 %%%设置停⽌位长度31 int_Index_StopBits=get(handles.pop_StopBits,'Value');32 string_StopBits=get(handles.pop_StopBits,'String');33 string_Select_StopBits=string_StopBits(int_Index_StopBits);34 double_StopBits=str2double(string_Select_StopBits);35set(o_SerialPort,'StopBits',double_StopBits);36 %%%设置输⼊缓冲区⼤⼩为1M37set(o_SerialPort,'InputBufferSize',1024000);38 %%%串⼝事件回调设置3940set(o_SerialPort,'BytesAvailableFcnMode','terminator');41set(o_SerialPort,'terminator','!'); %!标识结束符结束,⽅便处理和读取数据4243 o_SerialPort.BytesAvailableFcn={@EveBytesAvailableFcn,handles};44 % ----------------------打开串⼝-----------------------45 fopen(o_SerialPort);matlab串⼝我们采⽤回调函数,类似于中断⽅式哈,但是mtalb的串⼝⼗分的不好⽤哈,没有多线程,⽽我们在中断⾥⾯需要进⾏波形显⽰,四元素旋转等各种数据操作,是需要花费点时间的,这就导致我们的数据平率不能很⾼。
四翼飞行器动力学分析与建模1.引言四轴飞行器,又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。
这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
四轴飞行器的四个螺旋桨都是电机直连的简单机构,十字形的布局允许飞行器通过改变电机转速获得旋转机身的力,从而调整自身姿态。
因为它固有的复杂性,历史上从未有大型的商用四轴飞行器。
近年来得益于微机电控制技术的发展,稳定的四轴飞行器得到了广泛的关注,应用前景十分可观。
本章通过分析四旋翼直升机的动力学机制,运用已知的物理定律和方程来建立表征系统动态过程的数学模型。
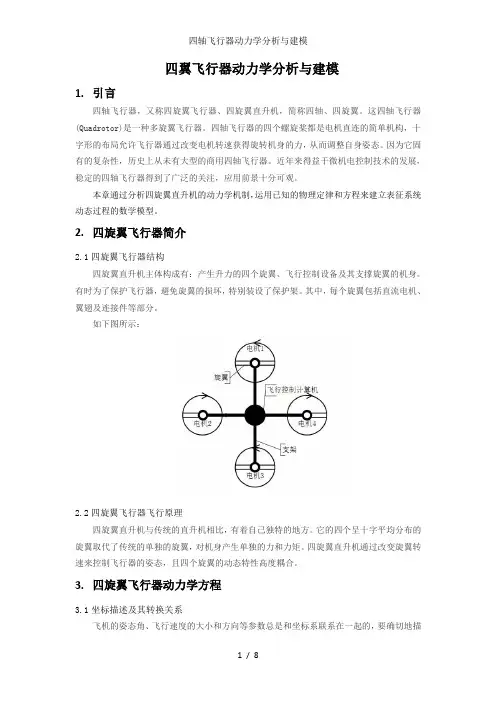
2.四旋翼飞行器简介2.1四旋翼飞行器结构四旋翼直升机主体构成有:产生升力的四个旋翼、飞行控制设备及其支撑旋翼的机身。
有时为了保护飞行器,避免旋翼的损坏,特别装设了保护架。
其中,每个旋翼包括直流电机、翼翅及连接件等部分。
如下图所示:2.2四旋翼飞行器飞行原理四旋翼直升机与传统的直升机相比,有着自己独特的地方。
它的四个呈十字平均分布的旋翼取代了传统的单独的旋翼,对机身产生单独的力和力矩。
四旋翼直升机通过改变旋翼转速来控制飞行器的姿态,且四个旋翼的动态特性高度耦合。
3.四旋翼飞行器动力学方程3.1坐标描述及其转换关系飞机的姿态角、飞行速度的大小和方向等参数总是和坐标系联系在一起的,要确切地描述飞机的运动状态,就要先建立适当的坐标系。
下面定义几种坐标系,并分析各坐标之间的相互转换关系:(1)地面坐标系E (OXYZ )地面坐标系用语研究飞机相对于地面的运动,确定飞机在空间的位置坐标X 、Y 、Z ,从而方便研究飞机的姿态、航向以及飞机相对起飞点的空间位置。
该坐标系原点固定于地面上飞机的起飞点,OX 轴指向飞机制定的飞行方向,OZ 轴垂直水平面向上,OY 轴垂直OXZ 平面。
(2)机体坐标系B (Oxyz )机体坐标系固定在机体上,原点设在飞机重心,纵轴Ox 平行于前后旋翼的连线,指向前方为正方向,竖轴Oz 平行于左右旋翼的连线,指向右方为正方向;轴Oy 与轴Ox 、Oz 所在平面垂直,并与轴Ox 、轴Oz 组成右手坐标系。
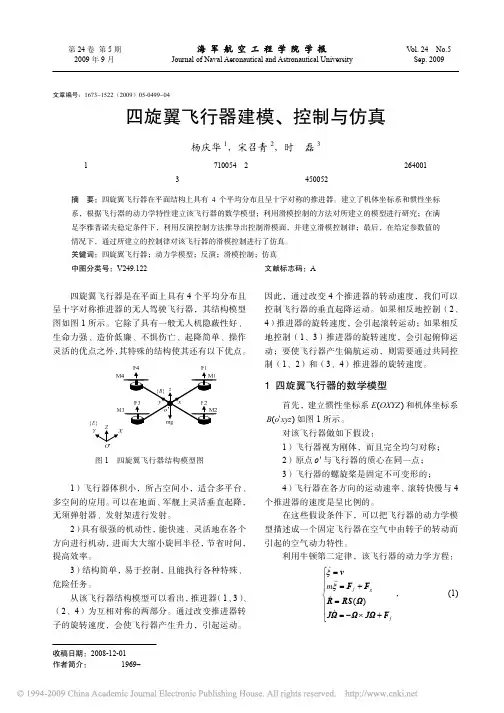
动态系统建模(四旋翼飞行器仿真)实验报告院(系)名称大飞机班学号ZY11DF120学生姓名叶心宇任课教师马耀飞2019年12月四旋翼飞行器的建模与仿真一、实验原理I.四旋翼飞行器简介四旋翼飞行器通过四个螺旋桨产生的升力实现飞行,原理与直升机类似。
四个旋翼位于一个几何对称的十字支架前、后、左、右四端,如图1-1所示。
旋翼由电机控制;整个飞行器依靠改变每个电机的转速来实现飞行姿态控制。
在图1-1中,前端旋翼1 和后端旋翼3 逆时针旋转,而左端旋翼2 和右端的旋翼4 顺时针旋转,以平衡旋翼旋转所产生的反扭转矩。
由此可知,悬停时,四只旋翼的转速应该相等,以相互抵消反扭力矩;同时等量地增大或减小四只旋翼的转速,会引起上升或下降运动;增大某一只旋翼的转速,同时等量地减小同组另一只旋翼的转速,则产生俯仰、横滚运动;增大某一组旋翼的转速,同时等量减小另一组旋翼的转速,将产生偏航运动。
图1-1 四旋翼飞行器旋翼旋转方向示意图从动力学角度分析,四旋翼飞行器系统本身是不稳定的,因此,使系统稳定的控制算法的设计显得尤为关键。
由于四旋翼飞行器为六自由度的系统(三个角位移量,三个线位移量),而其控制量只有四个(4 个旋翼的转速),这就意味着被控量之间存在耦合关系。
因此,控制算法应能够对这种欠驱动(under-actuated)系统足够有效,用四个控制量对三个角位移量和三个线位移量进行稳态控制。
本实验针对四旋翼飞行器的悬浮飞行状态进行建模。
II.飞行器受力分析及运动模型(1)整体分析如图1-2所示,四旋翼飞行器所受外力和力矩为:重力mg,机体受到重力沿-Z w方向四个旋翼旋转所产生的升力F i(i=1,2,3,4),旋翼升力沿Z B方向旋翼旋转会产生扭转力矩M i (i=1,2,3,4),M i垂直于叶片的旋翼平面,与旋转矢量相反。
图1-2 四旋翼飞行器受力分析(2)电机模型力模型2i F i F k ω= (1.1)旋翼通过螺旋桨产生升力。
一种基于Matalb的四旋翼飞行器姿态控制设计与仿真作者:周慧宋义来源:《科技资讯》2016年第20期摘要:近些年,航空界对四旋翼的研究与制造尤为关注。
该文针对四旋翼飞行器的飞行原理,推导了一种四旋翼飞行器数学模型,结合Matlab软件进行了四旋翼飞行器姿态控制仿真。
仿真分析结果表明了模型建立与姿态控制的准确性。
关键词:四旋翼建模仿真 Matlab中图分类号:TP271 文献标识码:A 文章编号:1672-3791(2016)07(b)-0062-02由于其本身的一些优势特性,使得近些年,航空界更加关注四旋翼的研究与制造。
四旋翼属于4轴4旋翼飞行器,四旋翼飞行时调节末端十字分布的4个电机转速,带动桨叶转动,使四旋翼在空中能够稳定飞行[1]。
4个电机与螺旋桨分布于机架4个轴的末端,2号、4号电机带动一组正桨顺时针旋转,1号、3号电机带动带动一组反桨旋转,同轴的电机转向相同,电机的转速越大,螺旋桨提供的升力就越大。
四旋翼无需改变旋翼桨距角进行飞行,而是通过改变4个螺旋桨的升力来获取不同的空中姿态,从而使四旋翼在空中能够稳定飞行并且做出各种姿态。
四旋翼属一种欠驱动系统,输入量大于输出量。
机架末端4个电机扭转力矩之和为总的输入,四旋翼有6个自由度,即3个轴向的角运动:俯仰、偏航、滚转;三轴向的线运动,前后、左右、升降,也是四旋翼的输出。
机体在空中的姿态中,俯冲运动是加大后端电机转速,同时减小前端电机转速来实现的,反之,可得到升仰运动。
滚转运动、偏航运动,都可通过电机调速来实现。
一般来说,四旋翼在空中的飞行姿态可以分为俯仰、偏航和滚转运动,都是通过调节4个螺旋桨的转速来实现的。
1 四旋翼空气动力学分析及建模四旋翼的动力学建模,是对实际飞行中涉及到的问题与方法进行数学描述和科学研究。
旋翼机的气动性,在本质上是非线性和非定常的,所以对其进行气动分析是建模的关键所在。
虽然四旋翼机体架构较为简单,但其在空中飞行的气动环境与飞行原理较为复杂。
四轴飞行器的建模与仿真 摘要 四旋翼飞行器是一种能够垂直起降的多旋翼飞行器,它非常适合近地侦察、监视的任务,具有广泛的军事和民事应用前景。本文根据对四旋翼飞行器的机架结构和动力学特性做详尽的分析和研究,在此基础上建立四旋翼飞行器的动力学模型。四旋翼飞行器有各种的运行状态,比如:爬升、下降、悬停、滚转运动、俯仰运动、偏航运动等。本文采用动力学模型来描述四旋翼飞行器的飞行姿态。在上述研究和分析的基础上,进行飞行器的建模。动力学建模是通过对飞行器的飞行原理和各种运动状态下的受力关系以及参考牛顿-欧拉模型建立的仿真模型,模型建立后在Matlab/simulink软件中进行仿真。 关键字:四旋翼飞行器,动力学模型,Matlab/simulink
Modeling and Simulating for a quad-rotor aircraft
ABSTRACT The quad-rotor is a VTOL multi-rotor aircraft. It is very fit for the kind of reconnaissance mission and monitoring task of near-Earth, so it can be used in a wide range of military and civilian applications. In the dissertation, the detailed analysis and research on the rack structure and dynamic characteristics of the laboratory four-rotor aircraft is showed in the dissertation. The dynamic model of the four-rotor aircraft areestablished. It also studies on the force in the four-rotor aircraft flight principles and course of the campaign to make the research and analysis. The four-rotor aircraft has many operating status, such as climbing, downing, hovering and rolling movement, pitching movement and yawing movement. The dynamic model is used to describe the four-rotor aircraft in flight in the dissertation. On the basis of the above analysis, modeling of the aircraft can be made. Dynamics modeling is to build models under the principles of flight of the aircraft and a variety of state of motion, and Newton - Euler model with reference to the four-rotor aircraft.Then the simulation is done in the software of Matlab/simulink. Keywords: Quad-rotor,The dynamic mode, Matlab/simulink 目录 一. 引言 ................................................................................................................................. 1 1.1 简介 ............................................................................................................................ 1 1.2研究背景 ..................................................................................................................... 2 1.3目标和内容 ................................................................................................................. 2 二.飞行器建模 ....................................................................................................................... 2 2.1 机体质心运动模型 .................................................................................................... 2 2.2 机体角运动模型 ........................................................................................................ 4 三.仿真与分析 ....................................................................................................................... 6 3.1仿真平台和参数选取 ................................................................................................. 6 3.2仿真过程 ..................................................................................................................... 8 3.2.1飞行器的升降运动仿真 .......................................................................................... 8 3.2.2飞行器的滚转运动仿真 .......................................................................................... 9 3.2.3飞行器的俯仰运动仿真 .......................................................................................... 9 3.2.4飞行器的偏航运动 ................................................................................................ 10 3.3 仿真结果分析 .......................................................................................................... 11 四.结论 ................................................................................................................................. 12 参考文献 ......................................................................................................................... 13 1
一.引言 1.1 简介
四旋翼飞行器也称为四轴飞行器,是一种有4个螺旋桨且螺旋桨呈十字形交叉的飞行
器,可以实现各种的运行状态,如:爬升、下降、悬停、滚转运动、俯仰运动、偏航运动等 四旋翼飞行器是一种无人机,无人机和有人飞机比较,具有体积相对较小,造价也比载人机低很多,使用非常的方便,在各种复杂的作战环境都可以进行作战等优点。无人机的优点备受世界各国军队的喜爱,在几次局部战争中,无人机都得以应用。无人机的准确度、高效性以及灵便的侦查能力得到了充分的发挥,并且引起了对无人机的军事应用和装备技术等相关问题的研究和发展。在21世纪的陆地战争、海洋战争甚至是在空中的战争,已经出现了很多的无人驾驶的武器,自行进行攻击的武器。无人机在其中占据了一个非常重要的角色,并且会在未来的军事战争中产生巨大的影响。 四旋翼飞行器是一种能够实现垂直的起降具有四个旋翼的飞行器,它分为两种,一种是用遥控器进行遥控的,另外一种是可以实现自主控制自主飞行。从总体的布局上来看,四旋翼飞行器是属于非共轴的多旋翼飞行器。与传统的旋翼飞机相比较而言,一方面机体的结构相对更为紧凑,另一方面旋翼的增多会产生更大的升力。由于四旋翼的前后与左右的旋翼转向相反,这样就可以抵消反扭力矩,因此就不需要去设置专门的尾桨来平衡机体的反力矩。小型的多旋翼飞行器可以对近地而的环境进行监视和侦察,利用摄像头可以实现实吋的摄像与航拍。