1-3传感器的误差和精度
- 格式:ppt
- 大小:854.50 KB
- 文档页数:12
传感器原理及工程应用答案1—1:测量的定义,答:测量是以确定被测量的值或获取测量结果为目的的一系列操作。
所以, 测量也就是将被测量与同种性质的标准量进行比较,确定被测量对标准量的倍数。
1—2:什么是测量值的绝对误差、相对误差、引用误差,答:绝对误差是测量结果与真值之差,即: 绝对误差=测量值—真值相对误差是绝对误差与被测量真值之比,常用绝对误差与测量值之比,以百分数表示 , 即: 相对误差=绝对误差/测量值×100%引用误差是绝对误差与量程之比,以百分数表示,即: 引用误差=绝对误差/量程×100%1—3什么是测量误差,测量误差有几种表示方法,它们通常应用在什么场合, 答: 测量误差是测得值减去被测量的真值。
测量误差的表示方法:绝对误差、实际相对误差、引用误差、基本误差、附加误差。
当被测量大小相同时,常用绝对误差来评定测量准确度;相对误差常用来表示和比较测量结果的准确度;引用误差是仪表中通用的一种误差表示方法,基本误差、附加误差适用于传感器或仪表中。
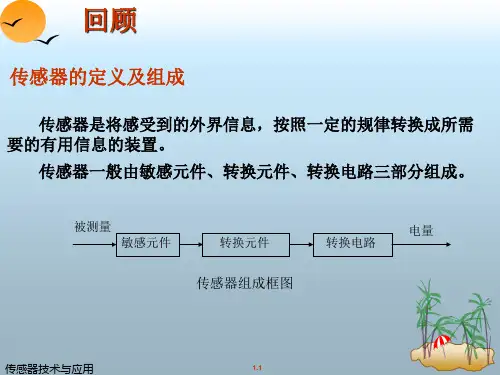
2,1:什么是传感器,它由哪几部分组成,它的作用及相互关系如何,答:传感器是能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置。
通常,传感器由敏感元件和转换元件组成。
其中,敏感元件是指传感器中能直接感受或响应被测量的部分; 转换元件是指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部分。
2—2:什么是传感器的静态特性,它有哪些性能指标,分别说明这些性能指标的含义, 答:传感器在被测量的各个值处于稳定状态时,输出量和输入量之间的关系称为传感器的静态特性;其主要指标有线性度、灵敏度、精确度、最小检测量和分辨力、迟滞、重复性、零点漂移、温漂。
灵敏度定义是输出量增量Δy与引起输出量增量Δy的相应输入量增量Δx之比。
传感器的线性度是指传感器的输出与输入之间数量关系的线性程度。
输出与输入关系可分为线性特性和非线性特性。
工业传感器精确度等级计算
1.级别0:级别0的传感器精确度最高,误差范围通常在0.1%以内。
这种传感器通常采用最先进的测量原理和制造工艺,用于对测量结果要求
非常高的应用领域,如科学研究、精密制造等。
2.级别1:级别1的传感器精确度较高,误差范围通常在0.1%-0.5%
之间。
这种传感器通常采用较先进的测量原理和制造工艺,适用于大多数
工业应用领域。
3.级别2:级别2的传感器精确度较低,误差范围通常在0.5%-1%之间。
这种传感器通常采用较简单的测量原理和制造工艺,适用于对测量结
果要求不是很高的应用领域。
在确定一个传感器的精确度等级时,需要考虑多种因素。
首先是测量
原理,不同的测量原理对传感器的精确度会有不同的影响。
其次是传感器
的结构和制造工艺,制造工艺越精良,对传感器的精确度要求越高。
此外,环境因素如温度、湿度、振动等也会对传感器的精确度产生影响。
为了保证传感器的精确度,需要进行严格的质量检验和校准。
质量检
验通常包括外观检查、性能测试等,校准则是通过与已知标准进行比较,
调整传感器的输出结果以使其更接近真实值。
总之,工业传感器的精确度等级是评估传感器测量结果准确性的重要
指标。
选择合适的精确度等级可以满足不同应用领域对测量精度的要求,
并提高生产过程的可靠性和效率。
思考题与习题参考答案第1章1-1 什么叫传感器?它由哪几部分组成?它们的相互作用及相互关系如何? 答:传感器是把被测量转换成电化学量的装置,由敏感元件和转换元件组成。
其中,敏感元件是指传感器中能直接感受或响应被测量的部分;转换元件是指传感器中能将敏感元件感受或响应的被测量转换成适于传输或测量的电信号部分。
由于传感器输出信号一般都很微弱,需要信号调理与转换电路进行放大、运算调制等,此外信号调理转换电路以及传感器的工作必须有辅助电源,因此信号调理转换电路以及所需的电源都应作为传感器组成的一部分。
1-2 什么是传感器的静态特性?它有哪些性能指标?分别说明这些指标的含义?答:传感器的静态特性是指被测量的值处于稳定状态时的输入与输出的关系。
衡量静态特性的重要指标是线性度、 灵敏度,迟滞和重复性等。
灵敏度是输入量∆y 与引起输入量增量∆y 的相应输入量增量∆x 之比。
传感器的线性度是指传感器的输出与输入之间数量关系的线性程度。
迟滞是指传感器在输入量由小到大(正行程)及输入量由大到小(反行程)变化期间其输入输出特性曲线不重合的现象。
重复性是指传感器在输入量按同一方向作全量程连续多次变化时,所得特性曲线不一致的程度。
漂移是指在输入量不变的情况下,传感器输出量随时间变化的现象。
精度是用来评价系统的优良程度。
1-3 某线性位移测量仪,当被测位移X 由3.0mm 变到4.0mm 时,位移测量仪的输出电压V 由3.0V 减至2.0V ,求该仪器的灵敏度。
解:该仪器的灵敏度为10.30.40.30.2X V -=--=∆∆=S (V/mm ) 1-4 用测量范围为-50~150KPa 的压力传感器测量140KPa 压力时,传感器测得示值为142KPa ,求该示值的绝对误差、实际相对误差、标称相对误差和引用误差。
解:绝对误差:X L ∆=-=142-140=2 相对误差100%L δ∆=⨯=2100% 1.4285%140⨯= 标称相对误差即%100⨯∆=x ξ=2100% 1.4084%142⨯= 引用误差100%-γ∆=⨯测量范围上限测量范围下限 =22100%1%150(50)200=⨯=--1-5 某传感器给定精度为2%F·S ,满度值为50mV ,零位值为10mV ,求可能出现的最大误差δ(以mV 计)。
传感器实验的误差分析原理传感器实验的误差分析原理是通过对传感器实验数据进行分析和处理,识别、评估和校正传感器测量中的各种误差来源和影响因素,从而提高传感器测量的准确性和可靠性。
传感器中的误差分析是传感器精度评定的重要一环,具有重要的理论和实际价值。
传感器实验的误差来源可以分为系统误差和随机误差两部分。
系统误差是由于传感器本身的固有缺陷、非线性特性、温度效应等因素引起的,通常与测量变量的值无关;随机误差则是由于外界干扰、电子噪声、测量环境变化等随机因素引起的,通常与测量变量的值相关。
在进行传感器实验误差分析时,通常依次进行以下几个步骤:1. 传感器参数校准:首先需要对传感器进行校准,确定传感器的基本参数,包括灵敏度、线性度、零偏等,以及与环境条件相关的温度补偿参数等。
校准一般使用标准信号源和标准设备进行,通过与标准参考的比较,确定传感器的输出特性,并建立转换模型。
2. 数据采集:进行传感器实验时,需要对传感器输出的信号进行采集和记录。
可使用数据采集卡、模拟-数字转换器等设备进行传感器信号的数字化。
采集的数据包括传感器输出的模拟电压值、数字编码值或其他物理量。
3. 数据分析:对采集到的传感器数据进行分析,包括数据的统计分布、均值和方差的计算,以及传感器的输出特性曲线的绘制等。
通过对数据的分析,可以初步了解数据中的误差来源和分布情况。
4. 误差评估:根据传感器的特性和数据分析的结果,对误差来源进行评估。
包括对系统误差和随机误差的评估,确定其大小和分布情况。
可以使用均方根误差(RMSE)、平均绝对误差(MAE)等指标进行评估。
5. 校正方法:根据误差评估的结果,采取相应的校正方法,对传感器输出进行修正。
校正方法可以是线性或非线性修正,根据传感器的特性和数据分析的结果确定。
校正方法包括增益校正、零点校正和非线性校正等。
6. 可靠性评估:对经过校正的传感器进行可靠性评估,包括评估传感器测量的精度、准确度、稳定性和可重复性等指标。
1-1 衡量传感器静态特性的主要指标。
说明含义。
1、 线性度——表征传感器输出-输入校准曲线与所选定的拟合直线之间的吻合(或偏离)程度的指标。
2、 回差(滞后)—反应传感器在正(输入量增大)反(输入量减小)行程过程中输出-输入曲线的不重合程度。
3、 重复性——衡量传感器在同一工作条件下,输入量按同一方向作全量程连续多次变动时,所得特性曲线间一致程度。
各条特性曲线越靠近,重复性越好。
4、 灵敏度——传感器输出量增量与被测输入量增量之比。
5、 分辨力——传感器在规定测量范围内所能检测出的被测输入量的最小变化量。
6、 阀值——使传感器输出端产生可测变化量的最小被测输入量值,即零位附近的分辨力。
7、 稳定性——即传感器在相当长时间内仍保持其性能的能力。
8、 漂移——在一定时间间隔内,传感器输出量存在着与被测输入量无关的、不需要的变化。
9、 静态误差(精度)——传感器在满量程内任一点输出值相对理论值的可能偏离(逼近)程度。
1-2 计算传感器线性度的方法,差别。
1、 理论直线法:以传感器的理论特性线作为拟合直线,与实际测试值无关。
2、 端点直线法:以传感器校准曲线两端点间的连线作为拟合直线。
3、 “最佳直线”法:以“最佳直线”作为拟合直线,该直线能保证传感器正反行程校准曲线对它的正负偏差相等并且最小。
这种方法的拟合精度最高。
4、 最小二乘法:按最小二乘原理求取拟合直线,该直线能保证传感器校准数据的残差平方和最小。
1-3 什么是传感器的静态特性和动态特性为什么要分静和动(1)静态特性:表示传感器在被测输入量各个值处于稳定状态时的输出-输入关系。
动态特性:反映传感器对于随时间变化的输入量的响应特性。
(2)由于传感器可能用来检测静态量(即输入量是不随时间变化的常量)、准静态量或动态量(即输入量是随时间变化的变量),于是对应于输入信号的性质,所以传感器的特性分为静态特性和动态特性。
Z-1 分析改善传感器性能的技术途径和措施。
传感器规格与精度计算
简介
本文档旨在介绍传感器规格以及如何计算传感器的精度。
传感器规格
传感器规格是描述传感器性能的重要指标。
常见的传感器规格
包括以下几个方面:
1. 测量范围:传感器能够测量的物理量的范围。
2. 灵敏度:传感器输出信号与所测量物理量变化之间的关系。
3. 分辨率:传感器能够检测的最小变化量。
4. 频率响应:传感器能够响应的最大变化频率。
5. 噪声:传感器输出信号中存在的随机干扰。
精度计算
传感器的精度是评估传感器测量结果与真实值之间的误差大小。
精度通常用以下几个指标来表示:
1. 绝对误差:传感器测量结果与真实值之间的差异。
2. 相对误差:绝对误差与真实值之间的比率。
3. 精度等级:根据绝对误差或相对误差的大小,将传感器分为
不同的等级。
计算传感器的精度可以通过以下步骤进行:
1. 测量一系列已知真实值的物理量,并记录对应的传感器测量
结果。
2. 计算每个测量结果与对应真实值之间的差异,得到绝对误差。
3. 若需要,将绝对误差转化为相对误差。
4. 根据绝对误差或相对误差的大小,判断传感器的精度等级。
总结
传感器规格包括测量范围、灵敏度、分辨率、频率响应和噪声
等指标。
计算传感器的精度可以通过测量已知真实值并比较测量结
果与真实值之间的差异来完成。
传感器的误差名词解释传感器作为现代科技领域中的重要组成部分,被广泛应用于各个领域。
它们能够将环境中的物理量转换为电信号,并通过电子装置进行处理和分析。
然而,由于各种因素的影响,传感器的输出结果并不完全准确,存在着一定的误差。
本文将通过对传感器误差的名词解释,揭示误差的成因和影响,以及如何减小误差以提高传感器的精度和可靠性。
1. 精度(Accuracy)精度是指传感器输出值与真实值之间的偏差程度,它是衡量传感器输出准确性的重要指标。
通常以百分比或部分比例表示精度,并分为静态精度和动态精度。
静态精度是在静止场景下进行测量时的精度,而动态精度则是在变化场景下进行测量时的精度。
2. 分辨率(Resolution)分辨率是指传感器在输入范围内能够检测到的最小变化量,也可称作最小可分辨步进。
它决定了传感器能够测量的最小精度。
通常以数字或模拟单位表示,较高的分辨率意味着传感器能够更精确地测量细微变化。
3. 灵敏度(Sensitivity)灵敏度是指传感器输出值对于输入变化的响应程度。
它描述了传感器的增益特性,即输入信号与输出信号之间的关系。
灵敏度越高,传感器能够更加敏感地感知到输入量的变化。
4. 线性度(Linearity)线性度是指传感器输出与输入之间的线性关系程度。
即传感器输出与输入之间的比例关系是否保持恒定。
线性度越高,传感器输出的误差越小,能够更准确地反映输入量的变化。
5. 偏移误差(Offset Error)偏移误差是指传感器输出与真实值之间的常量差异,也称为零位误差。
它表示了传感器在无输入信号时的输出偏离程度。
偏移误差可能由于传感器的制造缺陷或环境变化引起。
对于某些应用,需要经常校准传感器以减小偏移误差。
6. 非线性误差(Non-linearity Error)非线性误差是指传感器输出与输入之间的非线性关系导致的误差。
即传感器输出值与真实值之间的偏差不是恒定的,而是随着输入值的改变而变化。
非线性误差通常由传感器内部元件的非线性响应或环境因素引起。
〈传感器与传感器技术》计算题解题指导(供参考)第1章传感器的一般特性1-5某传感器给定精度为2%F • S,度值为50mV,零位值为10mV,求可能出现的最大误差以mV计)。
当传感器使用在满量程的1/2和1/8时,计算可能产生的测量百分误差。
由你的计算结果能得出什么结论?解:满量程(F?S)为50~10=40(mV)可能出现的最大误差为:m = 40 2%=0.8(mV)当使用在1/2和1/8满量程时,其测量相对误差分别为:0 8! 100% =4%40 12斗0.82 100% =16%40叫1-6有两个传感器测量系统,其动态特性可以分别用下面两个微分方程描述,试求这两个系统的时间常数和静态灵敏度K。
(1)30dy3y =1.5 10*T dt式中,y为输出电压,V; T为输入温度,C。
(2) 1.4史4.2y =9.6xdt式中,y——输出电压,J V; x——输入压力,Pa。
解:根据题给传感器微分方程,得(1) T =30/3=10(s) ,力--------------- sin[4t arctan(_,「)]1 Cv)21 . --------------- sin[4t —arctan(4=<0.1) 1 (4 0.1)2 = 0.93sin(4t -21.8 )1%⑴〔1(40 0.1)2=0.049sin(40t -75.96 )0.2sin[40t —arctan(40 0.1)]K =1.5 10勺3=0.5 10'(V/ C );(2)T =1.4/4.2=1/3(s),K =9.6/4.2=2.29( J V/Pa)。
1-7 设用一个时间常数=0.1s 的一阶传感器检测系统测量输入为x (t )=sin4 t +0.2sin40 t 的信号,试求其输出y (t )的表达式。
设静态灵敏度 K =1。
解 根据叠加性,输出y (t )为X !(t )=sin4 t 和X 2(t )= 0.2sin40 t 单独作用时响应 y 1(t )和 y 2(t )的叠加,即 y (t )= y 1(t )+ y 2(t )。