平面连杆机构设计
- 格式:pdf
- 大小:3.45 MB
- 文档页数:5
返回目录第 3章平面连杆机构设计3.1 教课基本要求1.认识构成铰链四杆机构的各构件的名称 ;熟习铰链四杆机构的基本形式、应用和演化 ;掌握行程速比系数、传动角、压力角、死点等的基本观点。
2.能依据四杆机构中存在曲柄的条件 ,娴熟判断出平面四杆机构的基本类型。
3.认识平面四杆机构设计往常采纳的作图法、分析法、实验法和图谱法。
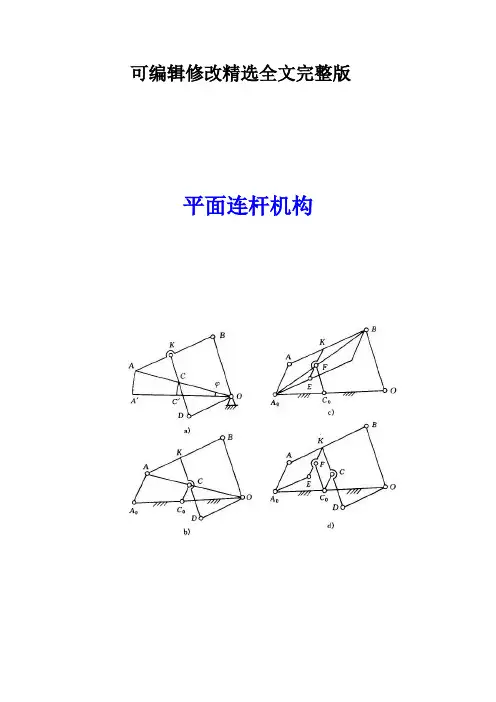
掌握按行程速比系数、给定连杆地点和给定两连架杆对应地点设计四杆机构的作图法。
3.2 要点与难点剖析本章的重点是平面四杆机构的基本特征以及平面四杆机构的设计 ; 难点是用作图法设计四杆机构。
1.极位夹角θ:机构从动件摇杆处于两极限地点时 , 原动件曲柄在相应两位置所夹的锐角。
假如θ≠表0,示机构有急回特征 , 且θ角愈大 ,机构的急回运动就愈明显。
所以要判断一个机构能否有急回特征就要找出极位夹角。
比如 , 一个对心曲柄滑块机构 , 因其极位夹角θ=0,机构就没有急回特征 ,但一个偏置曲柄滑块机构 , 因其极位夹角θ≠机0,构就有急回特征 ; 摆动导杆机构的摆角与其极位夹角相等,它有急回特征 ,但转动导杆机构就没有急回特征。
2.压力角α与传动角γ:在四杆机构中 , 当不计摩擦时 , 主动件通过连杆作用在从动件上的力的作用线与其作用点的速度方向之间所夹的锐角, 称为机构在此地点的压力角。
而把压力角的余角γ即, 连杆与从动摇杆所夹的锐角,称为传动角。
它们常用来权衡机构的传动性能 ,传动角γ愈大 , 即压力角愈小 , 机构的传动性能愈好 ,效率愈高。
多半机构运动中的传动角是变化的, 为了使机构传动质量优秀 , 一般规定机构的最小传动角γmin ≥ 40。
°为了检查机构的最小传动角,需要确立最小传动角的地点。
经过剖析可知:曲柄摇杆机构的最小传动角出此刻曲柄与机架共线的两地点之一;曲柄滑块机构的最小传动角出此刻曲柄与导路垂直的地点 ,导杆机构在任何地点的最小传动角都等于 90 °。
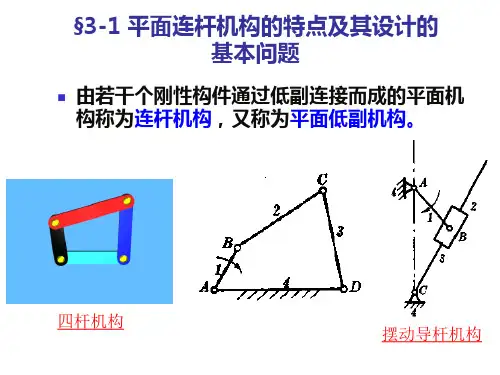
可编辑修改精选全文完整版平面连杆机构
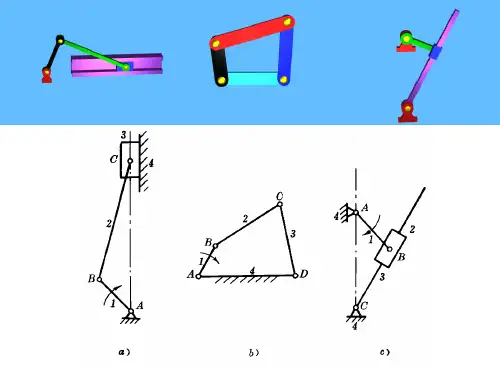
1 平面四杆机构的类型
平面四杆机构可分为两类:
1.全转动副的平面四杆机构,称为铰链四杆机构;
2.含有移动副的平面四杆机构,如曲柄滑块机构。
1.1 铰链四杆机构的基本类型
铰链四杆机构的基本类型
类型判断
铰链四杆机构存在曲柄的条件:
(1)最短杆与最长杆的长度之和,小于或等于其余两杆长度之和;
(2)连架杆和机架中必有一个是最短杆。
根据上述曲柄存在条件可得以下推论:
①铰链四杆机构中,若最短杆与最长杆的长度之和小于或等于其余两杆长度之和,则
取最短杆的相邻杆为机架时,得曲柄摇杆机构;
取最短杆为机架时,得双曲柄机构;
取与最短杆相对的杆为机架时,得双摇杆机构。
②铰链四杆机构中,若最短杆与最长杆的长度之和大于其余两杆长度之和,则不论取何杆为机架时均无曲柄存在,而只能得双摇杆机构。
1. 曲柄摇杆机构
雷达
汽车前窗刮雨器
搅拌机
飞剪
2. 双曲柄机构
两连架杆均为曲柄的四杆机构称为双曲柄机构。
特殊:平行双曲柄机构(平行四边形机构)
机车车轮联动机构反平行四边形机构。
如公共汽车车门启闭机构。
公共汽车车门启闭机构3. 双摇杆机构
两连架杆均为摇杆的四杆机构称为双摇杆机构。
起重机。
02平面连杆机构的设计计算设计计算是指根据设计要求和机构参数进行计算,以确定机构的尺寸、材料和工作性能等技术指标的过程。
本文将介绍02平面连杆机构的设计计算,包括机构类型选择、杆件尺寸设计和运动性能分析等。
一、机构类型选择1.传动比要求:根据实际需要确定机构的传动比,即输入与输出杆件的运动比值。
2.运动要求:根据机构所需完成的运动类型和精度要求,选择适合的机构类型。
3.结构紧凑度:考虑机构安装空间、结构合理性和制造工艺等因素,选择紧凑、易制造的机构类型。
二、杆件尺寸设计杆件尺寸设计是机构设计的关键环节,决定着机构的强度、刚度和运动特性。
具体步骤如下:1.确定负荷:根据使用条件和设计要求,确定机构的负荷、转矩和速度等参数。
2.计算受力:根据杆件的位置和受力情况,计算杆件的拉压应力和弯矩等。
3.材料选择:根据受力情况和材料性能,选择合适的材料,如碳钢、合金钢等。
4.尺寸计算:根据受力计算结果,计算杆件的截面尺寸、直径和长度等。
5.强度校核:根据材料强度和尺寸,进行强度校核,确保杆件在工作条件下不发生破坏。
6.刚度分析:根据杆件尺寸和连接方式,计算机构的刚度和变形情况,确保机构的工作精度。
三、运动性能分析运动性能分析是对机构运动特性进行计算和评估的过程,对于确定机构的工作性能和优化设计具有重要意义。
具体步骤如下:1.运动解析:根据机构的运动模式和约束条件,进行运动解析,得到机构的运动方程和转角速度等。
2.运动参数计算:根据机构的运动方程和参数,计算机构的位移、速度、加速度和滑动速度等。
3.动力学分析:对机构的动力学特性进行计算和分析,包括惯性力、弹性力和粘性力等。
4.稳定性分析:对机构的稳定性进行分析,确保机构的运动平稳和可靠性。
5.优化设计:根据运动性能分析结果,对机构的参数和结构进行优化设计,提高机构的工作效率和精度。
总结:02平面连杆机构的设计计算是通过选择合适的机构类型、进行杆件尺寸设计和运动性能分析,来确定机构的尺寸、材料和工作性能等指标。
《平面连杆传动机构》作业设计方案第一课时一、设计要求1.1 设计一个平面连杆传动机构,实现输出轨迹的特定运动要求。
1.2 提供设计方案的详细绘图和计算过程。
1.3 分析设计方案的合理性和可行性,评估传动机构的性能。
二、设计方案2.1 传动机构的结构设计本传动机构由曲柄连杆机构组成,曲柄为输入连杆,连杆为输出连杆。
曲柄的转动带动连杆进行往复运动,实现输出轨迹的特定运动要求。
曲柄的长度和连杆的长度根据特定运动要求进行选择。
2.2 传动机构的设计参数根据输出轨迹的特定运动要求,确定曲柄的转动角度范围和连杆的长度。
假设曲柄长度为L1,连杆长度为L2,曲柄转动角度为θ,连杆角度为φ,输出轨迹的特定运动要求为待定。
2.3 传动机构的运动分析根据曲柄和连杆的几何关系,分析曲柄的转动与连杆的运动之间的关系,确定输出轨迹的特定运动要求是否能够实现。
进行运动学分析,计算输出轨迹的运动参数。
2.4 传动机构的性能评估对传动机构的稳定性、运动精度、工作效率等性能进行评估和优化。
通过计算和仿真分析,验证设计方案的合理性和可行性,评估传动机构的性能是否满足输出轨迹的特定运动要求。
三、设计计算3.1 曲柄长度计算根据输出轨迹的特定运动要求,计算曲柄长度L1。
3.2 连杆长度计算根据输出轨迹的特定运动要求,计算连杆长度L2。
3.3 转动角度计算根据输出轨迹的特定运动要求,计算曲柄的转动角度θ。
3.4 运动参数计算根据曲柄和连杆的几何关系,计算输出轨迹的运动参数,如连杆角度φ。
四、设计绘图4.1 绘制传动机构的结构图绘制曲柄连杆机构的结构图,标注曲柄、连杆和输出轨迹的运动轨迹。
4.2 绘制传动机构的运动图绘制曲柄连杆机构的运动图,展示曲柄的转动和连杆的运动轨迹,验证输出轨迹的特定运动要求是否能够实现。
五、总结与展望通过本次作业设计,我对平面连杆传动机构的结构和运动原理有了更深入的了解,加深了对机械传动的认识。
在今后的学习和工作中,我将继续深入研究机械传动领域,不断提升自己的设计和分析能力,为机械设计领域的发展贡献自己的力量。