动力调谐陀螺仪误差分析及补偿技术——陈智民共21页文档
- 格式:ppt
- 大小:2.32 MB
- 文档页数:21
动力调谐陀螺仪角位移测试中的数据处理技术
罗云;陈维义;沈远
【期刊名称】《舰船电子工程》
【年(卷),期】2011(031)012
【摘要】坦克炮控系统的性能测试关键为角位移的测试,因此,研制了基于动力调谐陀螺仪的角位移测试系统。
介绍了系统组成及工作原理,并着重分析了角位移测量原理和误差,以及在线实时数据处理技术。
实验结果表明:基于动力调谐陀螺仪并采用改进零点渐变算法的角位移测试系统零点漂移小,测角精度可达0.48%,完全能满足炮控系统性能测试的需求。
【总页数】4页(P90-93)
【作者】罗云;陈维义;沈远
【作者单位】海军工程大学兵器工程系,武汉430033;海军工程大学兵器工程系,武汉430033;中国人民解放军第四八零五工厂军械修理厂,上海200439
【正文语种】中文
【中图分类】TJ81
【相关文献】
1.动力调谐陀螺仪漂移测试与补偿系统设计 [J], 马云峰;周百令;赵立业;万振刚
2.闭环测试法测定动力调谐陀螺仪调谐频率 [J], 林萍;朱福祥;齐红霞
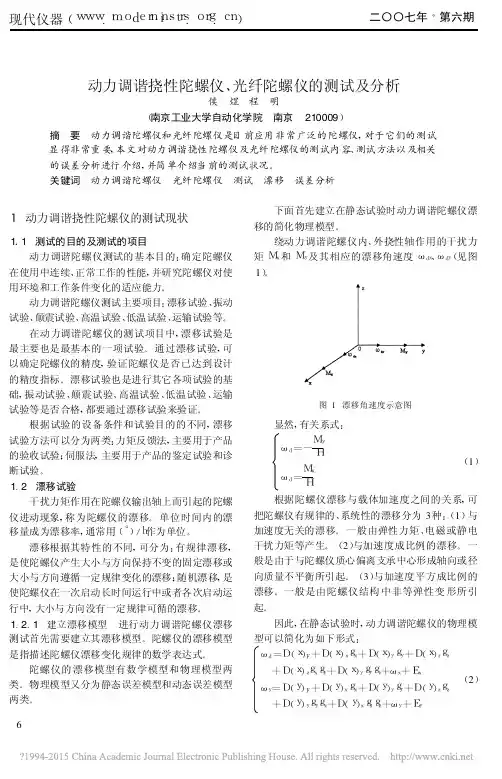
3.动力调谐挠性陀螺仪、光纤陀螺仪的测试及分析 [J], 侯煜;程明
4.动力调谐陀螺仪的八位置测试法 [J], 徐瑞峰;张英敏
5.HGA-RBF网络在动力调谐陀螺仪漂移预测中的应用 [J], 李真真;王宏力;王世方;王新国
因版权原因,仅展示原文概要,查看原文内容请购买。

第2章动力调谐陀螺仪原理及误差分析点,并选定X,y,Z三个坐标轴建立的坐标系Oxyz成为参考坐标系(简称参考系)。
质点P的位置即由(x,Y,z)确定。
质点P在该参考系中的位置也可以利用矢量方法来描述,以位置矢量(简称位矢),表示,则有,=订+力+庙(2—2—1)其中,“.,,膏分别表示空间的三个坐标方向上的单位矢量,称为坐标基矢。
通常把相对于观察者静止的参考系称为定参考系或静参考系,把相对于观察者运动的参考系称为动参考系,惯性定律(牛顿第一定律)成立的参考系称为惯性参考系,简称惯性系。
由于惯性定律指出:不受外力或所受外力的合力为零的物体将保持静止或作匀速直线运动,因此,通常把静止或保持匀速直线运动的参考系称为惯性系a必须指出,图2.1质点的位置矢量静止是一个相对概念,因为绝对静止的物体是不存在的。
2.2.2相对运动及科里奥利加速度物体相对于动参考系的运动称为相对运动,物体相对于静参考系的运动称为绝对运动,动参考系置。
相对于静参考系K的运动称为牵连运动。
动参考系世‘相对于静参考系置作任意方式的运动时,相对运动与绝对运动呈现比较复杂的关系。
即使K’系的原点D‘相对于足系静止,相对于x’系静止的物体相对于足系也在作圆周运动,它不但有沿圆周切向的速度,还具有加速度。
假设动参考系足。
相对于静参考系置既有平动,还有绕通过其原点o’的某根转轴转动,角速度矢量为∞,如图2.2所示。
对于某时刻位于空间的P点,其相对于足系的位矢为,,相对于K’系的位矢为,’,而丘’系的原点01相对于芷系的位矢为^,则,=L+rI(2—2—2)第2章动力调谐陀螺仪原理及误差分析其中K系的坐标用(2-2.1)式表示,量‘系的坐标为,’=z’f’+y’-,I+一詹’(2-2—3)其中,i’,,’,k’分别为动参考系K‘的坐标基矢。
图2.2动参考系作任意方式的运动o’点在K系中的坐标为I"o=Xoi+yJ+zok(2—2—4)在静参考系K中对时间的微商称为绝对微商,用导表示;在动参考系K1中对时问的微商称为相对微商,用昙表示。
摘要针对传统测控教学实验设备模块少,功能单一等的不足,本文设计一种基于动力调谐陀螺仪的教学系统,集系统辨识、桌面仿真、数字滤波与降噪、虚拟仪器等技术于一体,并按照测控系统正向设计流程,对此系统进行了理论分析、硬件设计和实验验证。
首先,结合动调陀螺的机械结构特点和欧拉动力学原理,得到动调陀螺开环简化模型,然后通过系统辨识方法,获取模型参数,并在开环模型参数基础上设计陀螺表头模拟器和教学实验系统,最后设计了电路实验和系统辨识实验,对整个系统进行实验验证,证明设计的合理性。
主要研究内容如下:1.分析了动调陀螺表头的开环模型和模型误差。
对动调陀螺内部复杂的机械结构进行欧拉动力学分析,得到陀螺开环模型;并根据陀螺转子的机械结构特点对系统进行模型误差分析,获取陀螺表头系统辨识的先验知识。
2.提出正交Levy辨识法,对陀螺表头模型参数进行辨识。
根据动调陀螺内部强有色噪声干扰的特点,提出了一种正交Levy辨识法,将正交投影算法和传统Levy辨识法相结合,提高传统Levy法抑制噪声的能力。
并通过正交Levy辨识法获取陀螺表头模型参数,拟合度达90%以上,为模拟表头和再平衡回路的设计提供了依据。
3.搭建动调陀螺模拟表头和动调陀螺测控教学系统,包括模拟表头的设计、积分器的选择、阻尼参数的计算以及再平衡回路中各电路模块的设计。
通过理论计算和桌面仿真的方式,确定设计参数,为实验过程中各个参数的调整提供理论指导。
4.设计动调陀螺测控教学系统的电路实验和系统辨识实验。
电路实验包括陀螺模拟表头实验、再平衡回路实验和闭环系统电路实验,对各个电路模块和整个系统的时域响应特性进行了验证;系统辨识实验包括模拟表头辨识实验和闭环系统辨识实验,主要从频域和模型角度对系统进行实验分析。
关键词:动力调谐陀螺仪;测控系统;教学设备;模型辨识ABSTRACTAiming at the shortages of traditional experiment equipment for measuring and control teaching in simple module and single function, this paper designed a teaching system based on Dynamic Tuning Gyroscope (DTG), which combines system model identification, desktop simulation, digital filter and noise reduction, virtual instrument and some other technology, and according to the design process of measuring and control system, theoretical analysis, hardware design and experiment tests were carried out in this paper. First of all, based on the DTG mechanical structure and Euler dynamics, the DTG simplified open-loop model was derived. Then, the model parameters are obtained through system identification, which was used to design the gyro header simulator and teaching experiment system. Finally, the circuit and system identification experiments were designed to verify the whole system. The main research contents of this paper were as follows:1.This paper analyzed the DTG open-loop model and model error. ThroughEuler dynamics analysis of the complex mechanical structure in DTG, the open-loop model was derived. And based on the mechanical structure characteristics of gyro rotor, the model error was analyzed to obtain the prior knowledge for DTG open-loop model identification.2.The orthogonal levy identification method was proposed to identify DTGopen-loop model. According to the strong colored noise in the DTG, an orthogonal Levy identification method was proposed, which combines the orthogonal projection algorithm and the traditional Levy identification method, whose noise suppression ability was improved, and the identification fitting degree was more than 90%.And the identified model parameters could be used to design gyro header simulator and the rebalance loop.3.Gyro header simulator and teaching experiment system was designed,including header simulator design, integrator selection, damping parameter calculation and the parameter design for each circuit module in the rebalance loop. And through theoretical calculation and desktop simulation, the designparameters are determined, which could guide the parameter adjustment in experiments.4.The circuit and system identification experiments were designed. Circuitexperiments included gyro header simulator experiment, rebalance loop experiment and circuit experiment of closed loop system, which could test the time-domain response characteristics of each circuit and the whole system;System identification experiments included gyro header simulator identification experiment and closed-loop system identification experiments, which were mainly used to analyze its frequency-domain model.KEY WORDS: dynamic tuning gyro; measurement and control system; teaching equipment; model identification目录目录 (IV)第1章绪论 (1)1.1课题背景和意义 (1)1.2国内外发展现状 (3)1.2.1测控教学系统国内外发展现状 (3)1.2.2动力调谐陀螺仪国内外发展现状 (4)1.2.3系统辨识国内外发展现状 (5)1.3主要研究内容 (6)第2章动力调谐陀螺仪机理建模与误差分析 (10)2.1动力调谐陀螺仪开环模型分析 (10)2.1.1动力调谐陀螺仪表头结构组成 (10)2.1.2动力调谐陀螺仪表头动力学分析 (11)2.1.3动力调谐陀螺仪开环模型 (12)2.2动力调谐陀螺仪模型误差分析 (14)2.3本章小结 (16)第3章动力调谐陀螺仪开环模型辨识 (17)3.1频率响应辨识法 (17)3.1.1相关分析法 (18)3.1.2 Levy辨识法 (19)3.2正交Levy辨识法 (21)3.2.1噪声对Levy法的影响 (21)3.2.2正交Levy法 (23)3.3动力调谐陀螺仪开环辨识实验 (25)3.3.1激励信号设计 (25)3.3.2辨识实验 (26)3.4本章小结 (30)第4章动力调谐陀螺仪教学系统参数设计 (31)4.1动力调谐陀螺仪表头模拟器 (31)4.1.1积分项传函电路 (31)4.1.2模拟表头耦合电路 (33)4.1.3模拟表头调制电路 (35)4.2动力调谐陀螺仪再平衡回路 (36)4.2.1动力调谐陀螺仪控制解耦 (36)4.2.2再平衡回路电路设计 (37)4.2.3动力调谐陀螺仪闭环模型简化 (43)4.3系统仿真 (44)4.3.1模拟表头系统仿真 (44)4.3.2闭环系统仿真 (46)4.4本章小结 (47)第5章动力调谐陀螺仪教学系统实验设计 (48)5.1电路实验 (48)5.1.1模拟表头电路实验 (49)5.1.2再平衡回路电路实验 (49)5.1.3闭环电路实验 (51)5.2系统辨识实验验证 (53)5.2.1模拟表头辨识实验 (53)5.2.2闭环系统辨识实验 (54)5.3本章小结 (56)第6章总结与展望 (57)6.1本文内容总结 (57)6.2展望 (57)参考文献 (59)发表论文和参加科研情况说明 (64)致谢 (65)第1章绪论1.1课题背景和意义当今信息社会,是科技迅速发展的时代,现代科技的进步不断促使测控技术实现智能化、数字化、信息化、集成化。

动力调谐陀螺动态误差的两种补偿方案
赵健;以光衢
【期刊名称】《中国惯性技术学报》
【年(卷),期】1997(000)003
【摘要】本文针对动力调谐陀螺的动态误差模型,提出了动力调谐陀螺的动态误差补偿的计算机算法。
算法中的输出值是角增量,它是二次拟和函数。
该算法具有精度高,实时性好的特点。
【总页数】3页(P17-19)
【作者】赵健;以光衢
【作者单位】北京航空航天大学
【正文语种】中文
【中图分类】V241.5
【相关文献】
1.动力调谐陀螺仪动态误差试验仿真器 [J], 陈熙源;万德钧
2.双轴平台动力调谐陀螺漂移补偿技术 [J], 李磊磊;陈家斌;谢玲
3.动力调谐陀螺仪温度补偿技术研究 [J], 顾春杰;周百令;张雪;黄丽斌
4.动力调谐陀螺寻北仪倾斜补偿算法 [J], 李宝林;卜继军;胡小兵
5.基于高阶补偿器的加速度传感器动态误差补偿方法 [J], 赵宁宁;王建林;魏青轩;于涛;赵利强
因版权原因,仅展示原文概要,查看原文内容请购买。
捷联式定位定向系统中动力调谐陀螺误差实时补偿
王明峰;胡学同
【期刊名称】《航天控制》
【年(卷),期】1994()1
【摘要】恶劣的工作环境给进一步提高捷联系统的性能带来了较大的困难,究其所有误差源,系统中的动力调谐陀螺误差对系统的精度影响较大。
为此,本文主要对“捷联式定位定向系统”中动力调谐陀螺的误差作分析与研究。
本文结合“捷联式定位定向系统”的特点,对动力调谐陀螺的主要漂移误差进行了分析,接着根据推得的动力调谐陀螺的静态、动态误差模型,提出了相应的误差补偿算法,并设计了误差实时补偿软件。
最后经仿真计算,证明其补偿效果较好。
【总页数】8页(P41-48)
【关键词】捷联式系统;动力调谐陀螺;误差
【作者】王明峰;胡学同
【作者单位】东南大学
【正文语种】中文
【中图分类】V241.55
【相关文献】
1.多层局部回归神经网络在激光陀螺捷联惯导系统惯性敏感器误差补偿中的应用[J], 吴美平;胡小平
2.激光陀螺捷联惯导中陀螺比例因子误差补偿技术 [J], 冯鸿奎;钟德安;战德军;邹
春华;刘扬
3.激光陀螺捷联惯导系统误差补偿技术 [J], 谢波;秦永元;万彦辉
4.捷联惯性系统初始对准中IMU安装误差及陀螺漂移的估计与补偿 [J], 程向红;黄华
5.激光陀螺捷联惯性导航系统中惯性器件误差补偿技术 [J], 熊智;刘建业;林雪原;曾庆化
因版权原因,仅展示原文概要,查看原文内容请购买。
动力调谐陀螺再平衡回路的误差分析作者:陈巍路林吉来源:《中国科技纵横》2012年第20期摘要:动力调谐陀螺是一种双输入双输出的系统,要完成测量功能需要对其解耦。
本文在分析了动调陀螺再平衡回路数字模型的同时进行了误差分析,分别分析了系统的稳定性、稳态误差和温度特性,具有较强的工程实践基础。
关键词:动力调谐陀螺解耦误差分析1、引言动力调谐陀螺(又称动调陀螺)因其结构简单,成本低廉,目前仍然在惯性系统中大量采用,随着人们对挠性陀螺的要求越来越高,大家采取新的改进措施从机械和电路两方面提高性能。
机械方面受到设计方法、材料、工艺等限制不容易实施,所以对通过设计再平衡回路来提高系统性能有着十分重要的意义。
目前现有的动调陀螺再平衡回路设计中一般采用工程简化陀螺模型,且随之设计的再平衡回路也是如此,没有充分考虑到陀螺的本身误差特性,在实际工程应用中,再平衡回路较少地进行误差分析。
本文就目前常用的模拟再平衡回路进行误差分析,找出再平衡回路的误差源,为工程设计提供一个理论基础。
2、动调陀螺的模拟再平衡回路的数学模型动调陀螺是一种双输入双输出的干式陀螺,在力反馈回路下可以测量两个方向的角速度信号,两输入两输出之间存在交叉耦合的作用。
陀螺从易于控制和补偿的角度考虑,应该消除陀螺交叉耦合的影响,所以陀螺的再平衡回路一般采用解耦控制的方案。
随着近几年大规模集成电路的飞速发展,动调陀螺的模拟再平衡回路以其线路简单可靠、体积小等优势被广泛使用。
目前针对二余度的动调陀螺模拟再平衡回路一般由信号处理级、校正级和功放级组成,其中信号处理级包括前置放大器、带通滤波器和相敏解调器,并在陀螺的调谐频率和章动频率处可以设置陷波器以消除交叉耦合以及减小陀螺马达转动引起的噪声,如图1所示。
3、再平衡回路的稳定性分析作为一个双输入双输出的系统,在各回路存在关联时,系统的稳定性、瞬态特性和稳态特性就比单变量的系统要复杂得多。
对于模拟再平衡回路来讲,系统的不完全解耦会使得按照单回路设计系统的增益裕度有所下降,而再平衡回路里使用的陷波器电路也会降低系统的增益裕度,所以在系统设计时需要考虑留有一定的增益裕度。