现代导航技术第五章(动力调谐陀螺)
- 格式:pdf
- 大小:827.46 KB
- 文档页数:31

第2章动力调谐陀螺仪原理及误差分析点,并选定X,y,Z三个坐标轴建立的坐标系Oxyz成为参考坐标系(简称参考系)。
质点P的位置即由(x,Y,z)确定。
质点P在该参考系中的位置也可以利用矢量方法来描述,以位置矢量(简称位矢),表示,则有,=订+力+庙(2—2—1)其中,“.,,膏分别表示空间的三个坐标方向上的单位矢量,称为坐标基矢。
通常把相对于观察者静止的参考系称为定参考系或静参考系,把相对于观察者运动的参考系称为动参考系,惯性定律(牛顿第一定律)成立的参考系称为惯性参考系,简称惯性系。
由于惯性定律指出:不受外力或所受外力的合力为零的物体将保持静止或作匀速直线运动,因此,通常把静止或保持匀速直线运动的参考系称为惯性系a必须指出,图2.1质点的位置矢量静止是一个相对概念,因为绝对静止的物体是不存在的。
2.2.2相对运动及科里奥利加速度物体相对于动参考系的运动称为相对运动,物体相对于静参考系的运动称为绝对运动,动参考系置。
相对于静参考系K的运动称为牵连运动。
动参考系世‘相对于静参考系置作任意方式的运动时,相对运动与绝对运动呈现比较复杂的关系。
即使K’系的原点D‘相对于足系静止,相对于x’系静止的物体相对于足系也在作圆周运动,它不但有沿圆周切向的速度,还具有加速度。
假设动参考系足。
相对于静参考系置既有平动,还有绕通过其原点o’的某根转轴转动,角速度矢量为∞,如图2.2所示。
对于某时刻位于空间的P点,其相对于足系的位矢为,,相对于K’系的位矢为,’,而丘’系的原点01相对于芷系的位矢为^,则,=L+rI(2—2—2)第2章动力调谐陀螺仪原理及误差分析其中K系的坐标用(2-2.1)式表示,量‘系的坐标为,’=z’f’+y’-,I+一詹’(2-2—3)其中,i’,,’,k’分别为动参考系K‘的坐标基矢。
图2.2动参考系作任意方式的运动o’点在K系中的坐标为I"o=Xoi+yJ+zok(2—2—4)在静参考系K中对时间的微商称为绝对微商,用导表示;在动参考系K1中对时问的微商称为相对微商,用昙表示。
现代军用导航技术作者: 东北一只虎发布日期: 2005-11-11 查看数: 2694 出自: [复制链接]精确制导武器给人的印象是精确打击所需的末制导技术。
但是,实际的中远程制导武器(如防区外打击武器)在到达最后攻击处的巡航或滑翔阶段中,需要由导航系统按照一定的预定轨迹修正运动姿态,以保证导弹或制导炸弹在飞行末段进入末制导导引头的有效制导区域,否则就会因目标丢失造成脱靶。
此外,由于战场空间的拓展,导航技术在多种军事装备中广泛应用,甚至拓展到单兵系统。
现代战争迫切要求武器系统装备精密导航设备,提供准确的导航信息,来提高武器的战斗性能。
一、卫星导航技术卫星导航技术是指利用卫星导航定位系统提供位置、速度及时间等信息来完成对各种目标的定位、导航、监测和管理。
它综合了传统天文导航定位和地面无线电导航定位的优点,相当于设置在太空的一个无线电导航台,可在任何时间、任何地点为用户确定其所在的地理经纬度和海拔高度。
目前成功应用的卫星导航系统有1.美国的GPS、2.俄罗斯的GLONASS和3.我国自主研制生产的"北斗一号"卫星导航系统。
4.欧洲正在实施"伽利略"计划,预计将于2008年投入使用。
1. GPS导航系统GPS、GLONASS和"伽利略"均为全球导航系统。
它们工作原理类似,均是利用同时接收到4颗以上导航卫星的导航信号,计算出导航信息。
GPS是由美国国防部运作的军民两用系统,直接目的是为了满足军事需要。
该系统已经广泛地应用在美军的各种武器平台上,扩展为精确制导武器中复合制导的一种极其重要的手段。
GPS系统提供需授权的P码(可加密为Y码)精密定位服务(PPS)和C/A码标准定位服务(SPS)。
目前,P码提供的运动目标在空间的位置精度可达5m,测速精度优于0.1m/s,计时精度可达20ns。
GPS已成为美军实施远程精确打击的"法宝",在多次军事冲突中发挥了重要作用。
动力调谐陀螺仪动基座锁定回路设计
顾春杰;周百令;李宏生
【期刊名称】《传感技术学报》
【年(卷),期】2005(18)4
【摘要】为了使动力调谐陀螺仪从加电至工作至完全停止的全过程均有效工作,设计了动基座上的锁定回路,其解耦网络的交叉轴项随着陀螺转速一起动态变化.仿真表明:此动基座锁定回路能够较好地将动力调谐陀螺仪在静止→正常工作→静止的整个过程中都能锁定在零偏角附近.
【总页数】3页(P860-862)
【作者】顾春杰;周百令;李宏生
【作者单位】东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096;东南大学,仪器科学与工程系,南京,210096
【正文语种】中文
【中图分类】V241.5;O318
【相关文献】
1.动力调谐陀螺仪动基座启停技术研究 [J], 刘文虎
2.动力调谐陀螺仪数字化全状态伺服回路设计 [J], 蒋昭兴;李宏生;武强
3.动力调谐挠性陀螺仪、光纤陀螺仪的测试及分析 [J], 侯煜;程明
4.动力调谐陀螺仪动基座启停技术研究 [J], 刘文虎
5.实现动基座上动调陀螺仪启停锁定 [J], 吴本寿;周百令
因版权原因,仅展示原文概要,查看原文内容请购买。
动力调谐陀螺仪系统辨识方法田凌子;李醒飞;赵建远;王亚辉【摘要】针对动力调谐陀螺仪(DTG)系统辨识中,传统辨识方法(最小二乘类辨识法和频域辨识法)辨识拟合度不高的问题,提出去离群点频域辨识法.该方法结合DTG 模型结构特征和固有有色噪声特点,将去离群点思想应用于DTG模型的频域辨识.实验结果表明,去离群点频域辨识法的辨识效果优于最小二乘类辨识法和传统频域辨识法,辨识拟合度在90%以上,并且辨识结果重复性好,辨识算法稳定.在DTG系统辨识中,去离群点频域辨识法能够提高辨识拟合度.【期刊名称】《计算机应用》【年(卷),期】2014(034)012【总页数】5页(P3641-3645)【关键词】动力调谐陀螺仪;系统辨识;强有色噪声;频域辨识法;最小二乘类辨识法【作者】田凌子;李醒飞;赵建远;王亚辉【作者单位】天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072;天津大学精密仪器与光电子工程学院,天津300072;精密测试技术及仪器国家重点实验室(天津大学),天津300072【正文语种】中文【中图分类】TP273;U666.120 引言陀螺仪作为惯性导航系统的核心部件,能够为载体提供精确的空间角位置信息[1-2]。
目前,能达到惯性级的中高精度陀螺仪仍多为工作在闭环条件下的机械式陀螺仪[3],如液浮陀螺仪、动力调谐陀螺仪(Dynamically Tuned Gyroscope,DTG)等。
陀螺仪闭环系统在建立过程中,需要可靠的陀螺模型,以便调整控制器参数,保证整个闭环系统的性能。
传统的陀螺仪建模方法主要是机理建模[4],然而由于陀螺仪系统结构复杂,机理建模需要忽略掉诸多因素,建模精度不高,也难以针对某个陀螺仪的实际情况进行具体分析,建模不具有普适性[4]。

动力调谐陀螺仪动基座锁定回路及稳定性研究动力调谐陀螺仪再平衡回路的设计已经有很多报道,但是它只能满足陀螺仪在正常工作情况下的锁定。
当陀螺仪处于启动和关机状态时,常规的再平衡回路不能将陀螺仪锁定在零偏角附近,其转子将反复碰撞双轴的止挡,导致动力调谐陀螺仪的挠性接头频繁地作大角度的弯曲,从而使动力调谐陀螺仪不能正常工作并严重影响陀螺仪的使用寿命。
因此,必须设计动力调谐陀螺仪的动基座锁定回路,将陀螺仪在陀螺电机从加电至完全停止的全过程中锁定在零偏角附近。
动力调谐陀螺仪的性能稳定性受多方面因素的影响,包括设计过程中材料的选择,结构的设计、热设计、电磁兼容性设计以及制造加工工艺等影响,以及应用过程中环境条件的影响,而温度变化对动力调谐陀螺仪性能稳定性的影响是最主要的,在陀螺仪表中,加入温度补偿环节,以减小温度变化对陀螺仪性能稳定性的影响。
具体步骤是:(1)实验测得各温度下陀螺仪的温度漂移,建立整个陀螺仪输出的温度模型,(2)通过测温元件,实测该时刻的陀螺仪温度值,并利用温度模型估计出陀螺仪当前温度下的漂移输出值,(3)从陀螺仪实测的输出中将估计出的漂移值扣除,即为陀螺仪补偿后的输出。
本文在动力调谐陀螺仪再平衡回路基础上,进行了动基座锁定回路设计、仿真和电路板制作,从仿真结果看,所设计的方案满足性能要求,硬件调试功能良好。
最后,通过实测的动力调谐陀螺仪温度漂移实验数据[2],进行了温度补偿方案研究和仿真。
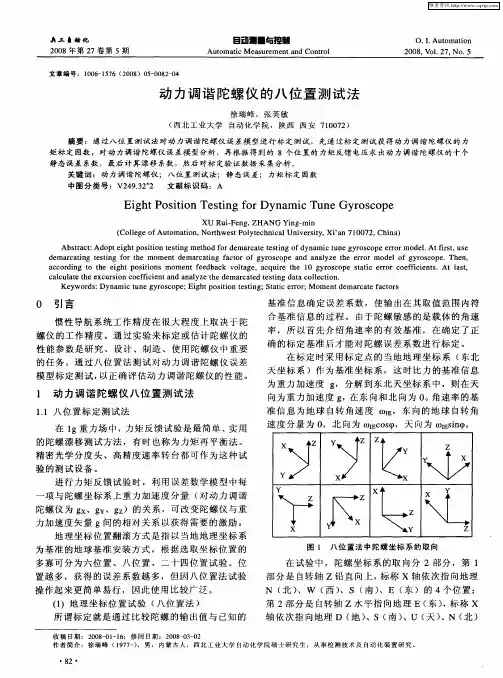
从仿真结果可以看到,所设计的温度补偿方案,能够很好地补偿温度漂移,减小温度变化对动力调谐陀螺仪性能稳定性的影响。