动力调谐陀螺仪共22页
- 格式:ppt
- 大小:2.01 MB
- 文档页数:22

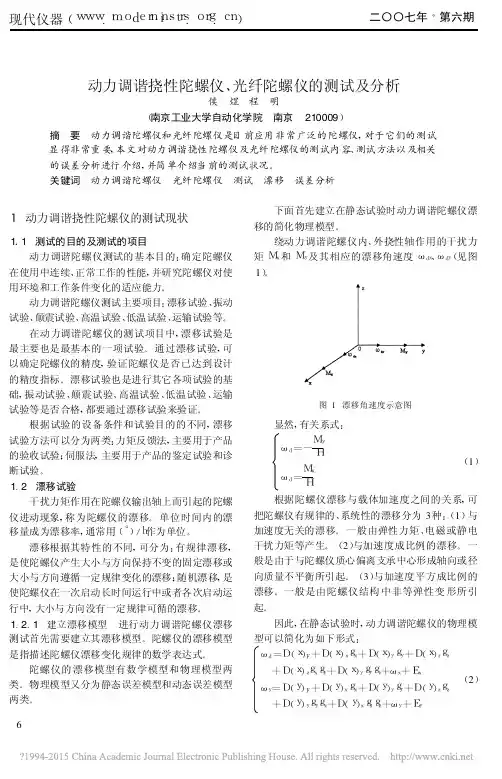
第2章动力调谐陀螺仪原理及误差分析点,并选定X,y,Z三个坐标轴建立的坐标系Oxyz成为参考坐标系(简称参考系)。
质点P的位置即由(x,Y,z)确定。
质点P在该参考系中的位置也可以利用矢量方法来描述,以位置矢量(简称位矢),表示,则有,=订+力+庙(2—2—1)其中,“.,,膏分别表示空间的三个坐标方向上的单位矢量,称为坐标基矢。
通常把相对于观察者静止的参考系称为定参考系或静参考系,把相对于观察者运动的参考系称为动参考系,惯性定律(牛顿第一定律)成立的参考系称为惯性参考系,简称惯性系。
由于惯性定律指出:不受外力或所受外力的合力为零的物体将保持静止或作匀速直线运动,因此,通常把静止或保持匀速直线运动的参考系称为惯性系a必须指出,图2.1质点的位置矢量静止是一个相对概念,因为绝对静止的物体是不存在的。
2.2.2相对运动及科里奥利加速度物体相对于动参考系的运动称为相对运动,物体相对于静参考系的运动称为绝对运动,动参考系置。
相对于静参考系K的运动称为牵连运动。
动参考系世‘相对于静参考系置作任意方式的运动时,相对运动与绝对运动呈现比较复杂的关系。
即使K’系的原点D‘相对于足系静止,相对于x’系静止的物体相对于足系也在作圆周运动,它不但有沿圆周切向的速度,还具有加速度。
假设动参考系足。
相对于静参考系置既有平动,还有绕通过其原点o’的某根转轴转动,角速度矢量为∞,如图2.2所示。
对于某时刻位于空间的P点,其相对于足系的位矢为,,相对于K’系的位矢为,’,而丘’系的原点01相对于芷系的位矢为^,则,=L+rI(2—2—2)第2章动力调谐陀螺仪原理及误差分析其中K系的坐标用(2-2.1)式表示,量‘系的坐标为,’=z’f’+y’-,I+一詹’(2-2—3)其中,i’,,’,k’分别为动参考系K‘的坐标基矢。
图2.2动参考系作任意方式的运动o’点在K系中的坐标为I"o=Xoi+yJ+zok(2—2—4)在静参考系K中对时间的微商称为绝对微商,用导表示;在动参考系K1中对时问的微商称为相对微商,用昙表示。

![动力调谐陀螺仪[实用新型专利]](https://uimg.taocdn.com/e8eae579c950ad02de80d4d8d15abe23482f032e.webp)
(10)授权公告号 (45)授权公告日 2014.02.12C N 203432588U (21)申请号 201320520515.5(22)申请日 2013.08.23G01C 19/02(2006.01)(73)专利权人重庆天箭传感器有限公司地址400060 重庆市南岸区花园路街道金山路158号3单元(72)发明人许吉金 庞宝泉(74)专利代理机构重庆市前沿专利事务所(普通合伙) 50211代理人谭小容(54)实用新型名称动力调谐陀螺仪(57)摘要本实用新型公开了一种动力调谐陀螺仪,包括壳体、陀螺转子、挠性接头、信号器、力矩器、陀螺电机、信号放大器,壳体包括左盖、底座、右盖和右罩,陀螺电机位于底座与右盖之间的空腔内,陀螺电机的驱动轴穿过底座并通过挠性接头与陀螺转子连接,陀螺转子的右端面具有环形槽,信号器和力矩器分别固定在底座上,且信号器位于力矩器的内侧,力矩器的左端伸入到陀螺转子的环形槽内,陀螺转子、挠性接头、信号器与力矩器均位于底座与左盖之间的空腔内,信号放大器位于右盖与右罩之间的空腔内,且信号放大器分别与信号器、力矩器电连接。
将陀螺电机、陀螺转子、信号器、力矩器和信号放大器合理布局,并封装于壳体内,具有体积小,重量轻的优点。
(51)Int.Cl.权利要求书1页 说明书2页 附图1页(19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书1页 说明书2页 附图1页(10)授权公告号CN 203432588 U1/1页1.一种动力调谐陀螺仪,包括壳体、陀螺转子(10)、挠性接头(9)、信号器(7)、力矩器(8)、陀螺电机(6)、信号放大器(5),其特征在于:所述壳体包括从左到右依次连接的左盖(1)、底座(2)、右盖(3)和右罩(4);所述陀螺电机(6)位于底座(2)与右盖(3)之间的空腔内,所述陀螺电机(6)的驱动轴(6a)穿过底座(2)并通过挠性接头(9)与陀螺转子(10)连接,所述陀螺转子(10)的右端面具有环形槽(10a),所述信号器(7)和力矩器(8)分别固定在底座(2)上,且信号器(7)位于力矩器(8)的内侧,所述力矩器(8)的左端伸入到陀螺转子(10)的环形槽(10a)内,所述陀螺转子(10)、挠性接头(9)、信号器(7)与力矩器(8)均位于底座(2)与左盖(1)之间的空腔内,所述信号放大器(5)位于右盖(3)与右罩(4)之间的空腔内,且信号放大器(5)分别与信号器(7)、力矩器(8)电连接。
