测设的基本工作
- 格式:doc
- 大小:838.00 KB
- 文档页数:10
二测设的基本工作及方法施工测量的基本任务是正确地将各种建筑物的位胃(平面及高程)在实地标定出来,而距离、角度和高程是构成位置的基本要素因此,在施工测量中,经常需要进行距离、角度和高程测设工作,距离、角度和高程是测设的基本工作,1. 测设已知水平距离在地面上测设已知水平距离是从地面一个已知点开始,沿已知方向,量出给定的实地水平距离,定出这段距离的另一端点:根据测量仪器工具不同,主要有以下两种方法。
1.钢尺测设法(1)一般测设方法:当测设精度要求不高时,可从起始点开始,沿给定的方向和长度,用钢尺量距,定出水平距离的终点。
为了校核,可将钢尺移动l0cm-20 cm.,再测设一次。
若两次测设之差在允许范围内,取它们的平均位置作为终点最后位置:(2)精确测设方法、在实地测设巳知距离与在地面上丈量两点间距离的过程正好相反。
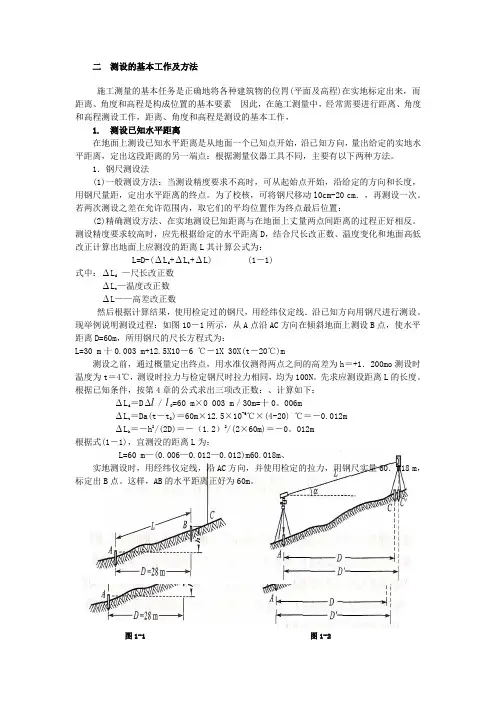
测设精度要求较高时,应先根据给定的水平距离D,结合尺长改正数、温度变化和地面高低改正计算出地面上应测没的距离L其计算公式为:L=D-(∆L d+∆L t+∆L) (1-1)式中:∆L d—尺长改正数∆L t—温度改正数∆L——高差改正数然后根据计算结果,使用检定过的钢尺,用经纬仪定线.沿已知方向用钢尺进行测设。
现举例说明测设过程:如图10-1所示,从A点沿AC方向在倾斜地面上测设B点,使水平距离D=60m,所用钢尺的尺长方程式为:L=30 m十0.003 m+12.5X10-6 ℃-1X 30X(t-20℃)m测设之前,通过概量定出终点,用水准仪测得两点之间的高差为h=+1.200mo测设时温度为t=4℃,测设时拉力与检定钢尺时拉力相同,均为100N。
先求应测设距离L的长度。
根据已知条件,按第4章的公式求出三项改正数:、计算如下:∆L d=D l∆/l0=60 m×0 003 m/30m=十0。
006m∆L t=Da(t-t0)=60m×12.5×10-6℃×(4-20) ℃=-0.012m∆L h=-h2/(2D)=-(1.2)2/(2×60m)=-0。

测设的基本工作测设的基本工作是指在科学研究、工程设计、技术开发等领域中进行实验和验证的核心过程。
它是一种系统性的方法,通过可控制、可重复的实验或观测来获取数据、验证理论、推断因果关系,并为决策提供指导。
测设的基本工作包括以下几个方面:1. 设定实验目标:在开始进行任何实验前,需要明确实验的目的和预期结果。
这个目标应该明确、具体,并与整个研究或开发项目的目标相一致。
2. 制定实验方案:根据实验目标,设计实验的步骤、流程和操作方法。
要考虑实验对象、实验条件、数据采集方法等因素,确保实验的可行性和准确性。
3. 收集数据:根据实验方案,执行实验并记录实验数据。
这包括观测、测量、采样等操作,以获取与实验目标相关的数量和性质的数据。
4. 数据处理与分析:对收集到的数据进行整理、清理和分析。
这包括数据的转化、计算、统计和图表展示,以揭示数据间的关系、规律和趋势。
5. 结果与讨论:根据数据处理与分析的结果,对实验的结论进行推断和解释。
这个过程需要综合考虑实验结果的可靠性、实用性和实际意义,进一步展开讨论和思考。
6. 编写实验报告:将整个实验的过程、数据、分析和讨论结果整理成报告。
报告应包括背景介绍、目的、方法、结果、讨论和结论等内容,便于他人理解和复现实验。
测设的基本工作在科学研究和技术发展中起着重要的作用。
它可以验证理论假设的可行性,揭示事物内在的规律和机制,为决策提供科学依据。
通过实验的不断迭代和改进,可以推动科学技术的进步和创新。
为了进行有效的测设工作,需要注意以下几点:1. 确定变量:要明确实验中的自变量和因变量,控制其他可能的干扰变量。
在实验设计中应考虑变量的选择和控制,以减少误差和提高实验的准确性。
2. 重复实验:为了增加实验结果的可靠性,应进行多次重复实验,获取多组数据。
通过统计分析这些数据,可以获得更加稳定和可信的实验结论。
3. 安全和伦理:在进行实验时,要考虑安全和伦理的问题。
确保实验操作的安全性,保护被试者和研究人员的权益,遵守伦理规范和法律法规。
测设的基本工作是什么测设是指在工程领域中对某一物理量进行测量和确定其数值的过程。
测设的基本工作包括测量、记录、分析和报告。
在实际工程中,测设是非常重要的,它直接关系到工程质量和安全。
下面将详细介绍测设的基本工作内容。
首先,测设的基本工作之一是测量。
测量是指利用测量仪器对待测物理量进行观测和记录。
在测设过程中,测量是必不可少的一环,它直接影响到后续工作的准确性和可靠性。
在进行测量时,需要选择合适的测量仪器,并严格按照测量规程进行操作,确保测量结果的准确性和可靠性。
其次,测设的基本工作还包括记录。
记录是指将测量得到的数据进行整理和保存。
在测设过程中,记录是非常重要的,它可以为后续的数据分析和报告提供依据。
在记录过程中,需要确保数据的完整性和准确性,同时也需要标明数据的来源和测量时间,以便后续的数据分析和验证。
另外,测设的基本工作还涉及到数据分析。
数据分析是指对记录下来的数据进行整理、处理和分析,以获取有关物理量的信息和规律。
在数据分析过程中,需要运用数理统计和相关的分析方法,对数据进行合理的处理和解释,以获取准确的测量结果和结论。
最后,测设的基本工作还包括报告。
报告是指将测量和数据分析的结果进行总结和归纳,形成书面或口头的报告。
报告是测设工作的重要成果,它直接关系到工程项目的质量和安全。
在进行报告时,需要清晰地陈述测量的目的、方法和结果,同时也需要提出相应的建议和改进建议。
总之,测设的基本工作包括测量、记录、数据分析和报告。
这些工作环节相辅相成,缺一不可。
只有严格按照测设的基本工作流程进行操作,才能确保测量结果的准确性和可靠性,从而保证工程项目的质量和安全。
§7 测设的基本工作课前问题:1、测设和测绘有什么区别,测设俗称什么?2、测设的基本工作有哪些?§7.1 基本概念1、测设与测绘的区别⎩⎨⎧⇒⇒图纸测绘:实地实地测设:图纸 2、基本概念:测设(放样)工作是根据工程设计图纸上待建的建筑物、构筑物的轴线位置、尺寸及其高程,计算出建筑物、构筑物的轴线交点与控制点之间的距离、角度、高差等测设数据。
然后以控制点为依据,在实地标定出来,以便施工。
3、测设工作的实质是点位的测设。
4、测设点位的基本工作是测设已知的水平距离、测设已知的水平角、测设已知高程。
§7.2 已知水平距离、水平角、高程的测设1、已知水平距离的测设(1) 一般方法:在地面上沿给定的AB 方向上测设出水平距离AB ′=D 。
检核:重新按测量方法量取AB ′,若相对误差在1/3000~1/5000之内,则将B ′点加以改正。
改正数δ=D -D ′。
当δ>0时,向外改正,反之,向内改正(2) 精密方法:在一般的方法的基础上,加尺长、温度、倾斜三项改正。
根据给定的距离D 计算放样的数据距离D 0 。
h t d l l l D D ∆-∆-∆-=02、已知水平角的测设(1) 一般方法(盘左、盘右中分法)首先,盘左瞄准B 点,定零,按放样数据测设出C ′点。
再用盘右按上述方法测设出C ″点,取C C '''的中点C ,即为∠BAC=β,就是要放样的角度。
(2) 精密方法:先按一般方法测设出AC 方向线,然后对∠BAC 进行多测回的水平角观测。
其值为β′,则 βββ'-=∆,垂距改正为: ρββ''∆⋅=∆⋅=AC AC D D CC tan 0 说明:0>∆β,从C 点向外量垂距,反之,向内改正。
3、已知高程的测设已知高程的测设是利用水准测量的方法,根据已知水准点,将设计高程测设到地面上。
首先,根据已知高差计算测设数据,测设时,将B 尺沿B 桩的侧面上下移动。
第七章 测设的基本工作教学目的:1、掌握测设的基本工作、点的平面位置的测设、坡度线的测设;2、熟悉全站仪的功能和使用。
教学重点:1、已知水平距离、水平角和高程的测设方法;2、点的平面位置测设数据计算和测设方法;教学难点:1、点的平面位置测设数据计算;2、全站仪的功能和使用;教学资料:测量学教材、教学课件教学方法:讲授法、演示法、多媒体教学讲授新课:测设(放样):在建筑场地上根据设计图纸所给定的条件和有关数据,为施工做出实地标志而进行的测量工作。
测设的三项基本工作:已知水平距离的测设、已知水平角测设、已知高程测设。
第一节 测设的基本工作一、测设已知水平距离已知水平距离的测设,是从地面上一个已知点出发,沿给定的方向,量出已知(设计)的水平距离,在地面上定出这段距离另一端点的位置。
(一)钢尺测设1、 一般方法当测设精度要求不高时,从已知点出发,沿给定的方向,用钢尺丈量已知水平距离两次,,两次丈量的相对误差在1/3000~1/5000内,取平均位置。
2、 精确方法当测设精度要求1/10000以上时,则用精密方法,使用检定过的钢尺,用经纬仪定线,水准仪测定高差,计算改正数,再根据计算结果,用钢尺进行测设。
L=D-△l d -△l t -△l h (7-1)举例:图7.1所示,已知待测设的水平距离D=26.000m ,在测设前进行概量定出端点,并测得两点间的高差h AB =+0.800m ,所用钢尺的尺长方程式为l t =30+0.005+0.000012×30(t-20℃)m ,测设时温度t=25℃,拉力与检定钢尺时拉力相同,求L 的长度(1)尺长改正△l d = D= ×26.000 =+0.0043m0l l △000.30005.0(2)温度改正△l t =α(t-20)D=0.000012×(25-20) ×26.000=+0.0016m(3) 倾斜改正△l h =- =- =-0.0123m (4)最后结果L=D-△l d -△l t -△l h =26-0.0043-0.0016+0.0123=26.0064m故测设时应在已知方向上量出26.0064m 定出端点B ,要测设两次求其平均位置并进行校核。
图7.1(二)光电测距仪测设如图7.2所示,安置光电测距仪于A 点,瞄准已知方向。
沿此方向移动棱镜位置,使仪器显示值略大于测设距离D ,定出C ′点。
在C ′点安置棱镜,测出棱镜的竖直角α及斜距L ,计算水平距离:D ′=L •COS α求出D ′与应测设的已知水平距离D 之差 △D=D - D ′。
根据△D 的符号在实地用钢尺沿已知方向改正C ′至C 点,并在木桩上标定其点位。
为了检核,应将棱镜安置于C 点,再实测AC 的水平面距离,与已知水平距离D 比较,若不符合要求,应再次进行改正,直到测设的距离符合限差要求为止。
图 7.2 二、测设已知水平角已知水平角的测设,就是在已知角顶点并根据一个已知边方向,标定出另一边的方向,使两方向的水平角等于已知水平角角值。
(一) 一般方法当测设水平角的精度要求不高时,可采用盘左、盘右取中的方法测设。
(二) 精确方法D h 222628.02当水平角测设精度要求较高时,可采用垂线支距法进行改正。
举例:已知地面上A 、O 两点,要测设直角∠AOB 。
测设方法:在O 点安置经纬仪,利用盘左、盘右取中方法测设直角,得中点B ′,量得OB ′=50m ,用测回法测了三个测回,测得∠AOB ′=89º59′30″。
β=89º59′30″-90º00′00″=-30″BB ′= OB ′ = 50× =0.007m 过点B ′沿OB ′的垂直方向向外量出距离BB ′=0.007m 定得B 点,则∠AOB 即为直角。
三、测设已知高程高程测设,是利用水准测量的方法,根据已知水准点,将设计高程测设到现场作业面上。
(一)地面上测设已知高程图7.5举例:如图7.5所示,某建筑物的室内地坪设计高程H d为8.500m ,附近有一水准点BM3,其高程为H B =8.350m 。
现在要求把该建筑物的室内地坪高程测设到木桩A 上,作为施工时控制高程的依据。
测设方法如下:(1)在水准点BM3和木桩A 之间安置水准仪,在BM3立水准尺上,用水准仪的水平视线测得后视读数a 为1.050m ,此时视线高程H 视为:H 视=H B +a =8.350十1.050=9.400m(2)根据视线高程和室内地坪高程即可算出桩点尺上的应有读数b应为:b应=H 视-H d=9.400-8.500=0.900m(3)在A 点立尺,使尺根紧贴木桩一侧上下移动,直至水准仪水平视线在尺上的读数b应为0.900m 时,紧靠尺底在木桩上划一道红线,此线就是室内地坪±0.000标高的位置。
(三) 高程传递当向较深的基坑或较高的建筑物上测设已知高程点时,只用水准尺已无法测定点位的高程,就必须采用高程传递法,利用钢尺将地面水准点的高程(或室内地坪±0.000)向下或向上引测。
举例:如图7.6所示,欲在一深基坑内设置一点B ,使其高程为H 。
地面附近有一水准点R ,其高程为H R 。
"ρ△β""20626530图 7.6 (1)在基坑一边架设吊杆,杆上吊一根零点向下的经检定的钢尺,尺的下端挂上一个与要求拉力相等的重锤,放在油桶内。
(2)在地面安置一台水准仪,设水准仪在R点所立水准尺上读数为a1,在钢尺上读数为b1。
(3)在基坑底安置另一台水准仪,设水准仪在钢尺上读数为a2。
(4)计算B点水准尺底高程为H时,B点处水准尺的读数b应为b=(H R+ a1)- ( b1- a2) – H (5-3)用同样的方法,亦可从低处向高处测设已知高程的点。
(三)测设水平面工程施工中,欲测设设计高程为H设的某施工平面,如图7.7所示,可先在地面上按图7.7一定的间隔长度测设方格网,用木桩定出各方格网点。
然后,根据已知高程测设的基本原理,由已知水准点A的高程H A测设出高程为H设的木桩点。
测设时,在场地与已知点A之间安置水准仪,读取A尺上的后视读数a,则仪器视线高程Hi为:Hi=H A+a依次在各木桩上立尺,使各木桩顶或木桩侧面的尺上读数b应为:b应=Hi-H设此时各桩顶或桩侧面标记处构成的平面就是需测设的水平面。
第二节点的平面位置测设测设点的平面位置的基本方法有直角坐标法、极坐标法、角度交会法和距离交会法等。
一、直角坐标法直角坐标法是根据直角坐标原理,利用纵横坐标之BM Ra1b1a2 b2吊杆水平桩B差,测设点的平面位置。
直角坐标法适用于施工控制网为建筑方格网或建筑基线的形式,且量距方便的建筑施工场地。
1、计算测设数据2、点位测设方法(1)在Ⅰ点安置经纬仪,瞄准Ⅳ点,沿视线方向测设距离30.00m ,定出m 点,继续向前测设50.00m ,定出N 点。
(2)在m 点安置经纬仪,瞄准Ⅳ点,按逆时针方向测设90º角,由m 点沿视线方向测设距离20.00m ,定出a 点,作出标志,再向前测设距离30.00m ,定出b 点,作出标志。
(3)在n 点安置经纬仪,瞄准Ⅰ点,按顺时针方向测设90º角,由n 点沿视线方向测设距离20.00m ,定出d 点,作出标志,再向前测设距离30.00m ,定出c 点,作出标志。
(4)检查建筑物四角是否等于90º,各边长是否等于设计长度,其误差均在限差以内。
测设上述距离和角度时,可根据精度要求分别采用一般方法或精密方法。
在直角坐标法中,一般用经纬仪测设直角,但在精度要求不高、支距不大、地面较平坦时,可采用钢尺根据勾股定理进行测设。
二、极坐标法极坐标法是根据一个水平角和一段距离测设点的平面位置。
极坐标法适用于量距方便,且待测设点距离控制点较近的建筑施工场地。
1、计算测设数据(1)计算AB 边的坐标方位角(2)计算AP 与AB 之间的夹角。
(3)计算A 、P 两点间的水平距离。
举例:已知 x A =348.758m, y A =433.570m, x P =370.000m, y P =458.000m, αAB =103º48′48″,试计算测设数据β和D AP 。
【解】αAP = arctan = arctan = 48º59′34″β=αAB -αAP =103º48′48″-48º59′34″=54º49′14″D AP =22570.433000.458758.348000.370)()(-+-=32.374m 2、点位的测设方法(1)在A 点安置经纬仪,瞄准B 点,按逆时针方向测设β角,定出AP 方向。
(2)沿AP 方向测设水平距离D AP ,定出P 点,作出标志。
(3)用同样的方法测设建筑物的另外三个角点。
全部测设完毕后,检查建筑物四角是否等于90º,各边长是否等于设计长度,其误差均应在限差以内。
三、角度交会法角度交会法是在两个或多个控制点上安置经纬仪,通过测设两个或多个已知水平角角度,交会出待定点的平面位置。
这种方法又称为方向交会法。
角度交会法适用于待定点离控制点较远,且量距较困难的建筑施工场地。
1、计算测设数据(1)按坐标反算公式。
AP AP X Y △△758.348000.370570.433000.458--(2)计算水平角。
2、点位测设方法(1)在A、B两点同时安置经纬仪,同时测设水平角β1和β2定出两条方向线,在两条方向线相交处钉一个木桩,并在木桩上沿AP、BP绘出方向线及其交点。
(a)(b)图 7.10(2)在C点安置经纬仪,测设水平角β3,同样在木桩上沿CP绘出方向线。
(3)如果交会没有误差,则此方向线应通过前两方向线的交点,此交点即为待测点P点。
由于测设有误差,往往三个方向不交于一点,而形成一个误差三角形,如图7.10(b)所示。
如果此三角形最长边不超过允许范围,则取三角形的重心作为P点的最终位置。
四、距离交会法距离交会法是根据两个控制点测设两段已知水平距离,交会定出待测点的平面位置。
距离交会法适用于场地平坦,量距方便,且控制点离测设点不超过一尺段长的建筑施工场地。
1、计算测设数据2、点位测设方法(1)将钢尺的零点对准A点,以D AP为半径在地上画一圆弧。
(2)将钢尺的零点对准B点,以D BP为半径在地上再画一圆弧。
两圆弧的交点即为P点的平面位置。
(3)用同样方法测设出Q、R、S的平面位置。
(4)测量各条边的水平距离,与设计长度进行比较,其误差应在限差以内。
测设时如有两根钢尺,则可将钢尺的零点同时对准A、B点,由一人同时拉紧两根钢尺,使两根钢尺读数分别为D AP、 D BP,则此两读数相交处即为待测设的P点。