单片机多机通信原理简述
- 格式:pdf
- 大小:88.07 KB
- 文档页数:1

摘要本文详细介绍了基于RS-485总线的单片机与多台单片机间的串行通信原理、实现方法和相应的通信硬件、软件设计。
该设计是由单片机与单片机组成的主从控制系统,其中单片机做为上位机对下位单片机是实现控制和监视功能。
它包括通信和控制两个功能模块。
单片机作为下位机在整个系统中属于从属地位,主要用来接收上位机的命令。
由于此通信的单片接口是RS232的9针接口,且下位机数目有限(32台)。
所以本设计采用了RS485总线以及RS232转RS485的协议芯片以满足长距离多机通信,本文讨论了总线接口转换、主从式通信协议设计方法,给出了采用中断式处理的通信过程流程图,并叙述了设计过程中必备的绘图软件Protel DXP的应用,以及编辑源代码软件keil uVision2的应用,实现了单片机对多个单片机组成采集终端的通信与管理。
关键词:单片机单片机RS-485 通信AbstractThe communication 、realized method and corresponding design of hardware and software between 单片and multiple MCUs based on RS-485 is described in detai in the article. This design instroduces a pincipal and subordinate control system which is composed of 单片and single chip. Divided from its function, it includes two parts: communication and control, in which 单片is used as master, and MCUs is used as slave so as to receive the single order from the master.The bus interface conversion and the design of master-slave communication protocol is introduced and The program flowchart of communication with interrupt process is also given. In the process of design, the use of unnecessary painter software and code editor software is depicted so that realize the communication and administration between 单片and multiple MCUs which composed collection terminal.Keywords: 单片MCUs RS-485 communication目录第一章绪论 (1)第二章课题实施方案 (2)2.1 系统硬件设计 (2)2.2 系统软件设计 (3)第三章硬件电路设计 (9)3.1 C51单片机结构 (9)一CPU结构 (10)二ROM存储器 (11)三I/O端口 (11)四定时器/计数器 (12)五中断系统 (13)3.1.2 51单片机引脚功能及其连接 (13)3.1.3 51 中断系统 (15)3.1.4 C-51的串行通信 (15)3.2.1串行接口RS232结构与引脚功能 (21)3.3 Protel DXP 2004原理图设计 (23)3.3.1 Protel 2004的基本操作 (23)3.3.2绘制原理图 (25)3.3.3制作芯片原理图库 (27)第四章软件电路设计 (30)4.1 系统的通信协议 (31)4.2 C51编程实现单片机与单片机之间的串行通信 (31)4.3 Windows集成开发环境uVision2 (35)4.3.1启动uVision2 (35)4.3.2创建程序 (36)总结 (41)致谢 (42)参考文献 (43)第一章绪论单片机由于其具有控制功能强、设计灵活和性能价格比高的特点。
单片机原理及应用第2版课后答案第6章习题答案1.异步通信和同步通信的主要区别是什么?MCS-51串行口有没有同步通信功能?答案:异步通信因为每帧数据都有起始位和停止位,所以传送数据的速率受到限制。
但异步通信不需要传送同步脉冲,字符帧的长度不受限制,对硬件要求较低,因而在数据传送量不很大。
同步通信一次可以连续传送几个数据,每个数据不需起始位和停止位,数据之间不留间隙,因而数据传输速率高于异步通信。
但同步通信要求用准确的时钟来实现发送端与接收端之间的严格同步。
MCS-51串行口有同步通信功能。
2.解释下列概念:(1)并行通信、串行通信。
(2)波特率。
(3)单工、半双工、全双工。
(4)奇偶校验。
答案:(1)并行通信:数据的各位同时进行传送。
其特点是传送速度快、效率高,数据有多少位,就需要有多少根传输线。
当数据位数较多和传送距离较远时,就会导致通信线路成本提高,因此它适合于短距离传输。
串行通信:数据一位一位地按顺序进行传送。
其特点是只需一对传输线就可实现通信,当传输的数据较多、距离较远时,它可以显著减少传输线,降低通信成本,但是串行传送的速度慢。
(2)波特率:每秒钟传送的二进制数码的位数称为波特率(也称比特数),单位是bp(bitperecond),即位/秒。
(3)单工:只允许数据向一个方向传送,即一方只能发送,另一方只能接收。
半双工:允许数据双向传送,但由于只有一根传输线,在同一时刻只能一方发送,另一方接收。
全双工:允许数据同时双向传送,由于有两根传输线,在A站将数据发送到B站的同时,也允许B站将数据发送到A站。
(4)奇偶校验:为保证通信质量,需要对传送的数据进行校验。
对于异步通信,常用的校验方法是奇偶校验法。
采用奇偶校验法,发送时在每个字符(或字节)之后附加一位校验位,这个校验位可以是“0”或“1”,以便使校验位和所发送的字符(或字节)中“1”的个数为奇数——称为奇校验,或为偶数——称为偶校验。
接收时,检查所接收的字符(或字节)连同奇偶校验位中“1”的个数是否符合规定。

mcs51串行多机通讯的工作原理以mcs51串行多机通讯的工作原理为标题,我们来探讨一下其详细内容。
让我们了解一下什么是mcs51。
MCS-51是英特尔公司(Intel)开发的一款8位单片机系列,它广泛应用于各种嵌入式系统中。
MCS-51具有丰富的外设接口和强大的功能,因此被广泛应用于各种应用领域,包括串行多机通讯。
串行多机通讯是指在多台计算机之间通过串行通讯接口进行数据传输和通信。
在mcs51系列单片机中,串行多机通讯是通过UART (通用异步收发传输器)来实现的。
UART是一种串行通讯接口,它可以将并行数据转换为串行数据进行传输,并将接收到的串行数据转换为并行数据。
在mcs51中,串行多机通讯的工作原理如下:1. 首先,需要配置UART的工作模式。
mcs51系列单片机通常具有多个UART接口,每个接口都有自己的控制寄存器和数据寄存器。
通过配置这些寄存器的值,可以设置UART的工作模式、波特率和其他参数。
2. 在发送数据之前,首先需要将要发送的数据存储在数据寄存器中。
mcs51通过写入数据寄存器来发送数据。
当数据写入数据寄存器后,UART将自动将其转换为串行数据,并通过串行通讯线路发送出去。
3. 接收数据时,mcs51将从串行通讯线路接收到的串行数据存储在数据寄存器中。
通过读取数据寄存器,可以获取接收到的数据。
当数据被读取后,数据寄存器将被清空,以接收下一次接收到的数据。
4. 在串行多机通讯中,需要为每个参与通讯的设备分配唯一的地址。
通过地址,可以确定数据的发送和接收方。
在mcs51中,地址通常通过配置UART的控制寄存器来实现。
通过设置控制寄存器的地址位,可以选择发送或接收特定地址的数据。
5. 数据的传输可以是单向的,也可以是双向的。
对于单向传输,一台设备将数据发送到另一台设备,而另一台设备只负责接收数据。
对于双向传输,两台设备既可以发送数据,也可以接收数据。
在mcs51中,可以通过配置UART的工作模式来选择单向传输还是双向传输。

梁晨3116301095用51单片机实现一主多从一、多机通信原理在多机通信中,每台从机均分配有一个从机地址,主机与从机之间进行串行通信时,通常是主机先呼叫某从机地址,唤醒被叫从机后,主、从两机之间进行数据交换。
而未被呼叫的从机则继续进行各自的工作。
可是,如果在主机与某被呼叫从机进行数据交换过程中,其他从机如果不采取相应的数据识别技术,则这些从机就会因为串行通信线上有数据传输而时时被打断,影响正常的工作。
利用单片机的串口工作方式2、方式3可以很好解决上述问题。
它们的通信方式之一如图1所示。
图1 多机通信结构图在多机通信过程中,从机首先要解决的是如何识别主机发送的是地址信息还是数据信息。
当发送的是地址信息时,各从机都响应串口中断,接收主机下发的一帧地址数据。
而当主机发送数据帧时,无关从机可不响应串口中断。
解决的方法是:当主机发送一帧地址信息时,应保持这帧数据的第9位为1(即TB8=1)。
从机按照工作方式2或工作方式3运行时,将串口寄存器SCON中的控制位SM2置为1,当所接收的一帧数据的第9位为1,所有从机都产生串口中断,接收这一帧地址数据并与各自的从机地址进行比较,以判断主机是否要与本机通信。
接收到的地址数据与从机地址相等达到为被呼叫从机,该从机将串口控制寄存器SCON中的控制位SM2清为0,去接收主机发送来的数据帧(数据帧的第9位为0),此时不管接收到的第9位数据是否为1或0,都要产生串口中断,这就保证了主机与被呼叫从机间的正常数据通信。
数据通信结束后,该从机又重新将串行口控制寄存器SCON中的控制位SM2置为1,为下一次与主机进行通信做好准备。
其他从机则一直在SM2=1下继续自己的工作,不会因为主、从机之间的数据通信而被打断。
多机通信的实现,主要靠主、从机正确地设置与判断多机通信控制位SM2和发送或接收的第9位数据(TB8或RB8)。
当主机给从机发送信息时,要根据发送信息的性质来设置TB8,发送地址信号时,设置TB8=1;发送数据或命令时,设置TB8=0。

一、多机通信原理在多机通信中,主机必须要能对各个从机进行识别,在51系列单片机中可以通过SCON 寄存器的SM2位来实现。
当串口以方式2或方式3发送数据时,每一帧信息都是11位,第9位是数据可编程位,通过给TB8置1或置0来区别地址帧和数据帧,当该位为1时,发送地址帧;该位为0时,发送数据帧。
在多机通信过程中,主机先发送某一从机的地址,等待从机的应答,所有的从机接收到地址帧后与本机地址进行比较,若相同,则将SM2置0准备接收数据;若不同,则丢弃当前数据,SM2位不变。
二、多机通信电路图此处,U1作为主机,U2为从机1,U3为从机2。
三、C语言程序(1)主机程序#include<reg51.h>#include<string.h>#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char Table[9]={0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39}; unsigned char Buff[20]; //数据缓冲区unsigned char temp=0xff;sbit KEY1=P1^6;sbit KEY2=P1^7;//unsigned char addr;//延时1ms函数void delay_1ms(unsigned int t){unsigned int x,y;for(x=t;x>0;x--)for(y=110;y>0;y--);}//缓冲区初始化void Buff_init(){unsigned char i; //将Table里的数据放到缓冲区里for(i=0;i<9;i++){Buff[i]= Table[i];delay_1ms(100);}}//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//发送数据函数void SEND_data(unsigned char *Buff){unsigned char i;unsigned char lenth;unsigned char check;lenth=strlen(Buff); //计算数据长度check=lenth;TI=0; //发送数据长度TB8=0; //发送数据帧SBUF=lenth;while(!TI);TI=0;for(i=0;i<lenth;i++) //发送数据{check=check^Buff[i];TB8=0;SBUF=Buff[i];while(!TI);TI=0;}TB8=0; //发送校验字节SBUF=check;while(!TI);TI=0;}//向指定从机地址发送数据void ADDR_data(unsigned addr){while(temp!=addr) //主机等待从机返回其地址作为应答信号{TI=0; //发送从机地址TB8=1; //发送地址帧SBUF=addr;while(!TI);TI=0;RI=0;while(!RI);temp=SBUF;RI=0;}temp=_ERR_; //主机等待从机数据接收成功信号while(temp!=_SUCC_){SEND_data(Buff);RI=0;while(!RI);temp=SBUF;RI=0;}}void main(){Buff_init();serial_init();while(1){if(KEY1==0){delay_1ms(5);if(KEY1==0){while(!KEY1);ADDR_data(0x01);}}if(KEY2==0){delay_1ms(5);if(KEY2==0){while(!KEY2);ADDR_data(0x02);}}}}(2)从机1程序#include<reg51.h>#include<string.h>#define addr 0x01//从机1的地址#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char aa=0xff;//主机与从机之间通信标志unsigned char Buff[20];//数据缓冲区//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//接收数据函数unsigned char RECE_data(unsigned char *Buff) {unsigned char i,temp;unsigned char lenth;unsigned char check;RI=0; //接收数据长度while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;lenth=SBUF;RI=0;check=lenth;for(i=0;i<lenth;i++) //接收数据{while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;Buff[i]=SBUF;check=check^(Buff[i]);RI=0;}while(!RI); //接收校验字节if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;temp=SBUF;RI=0;check=temp^check; //将从主机接收到的校验码与自己计算的校验码比对if(check!=0) //校验码不一致,表明数据接收错误,向主机发送错误信号,函数返回0xff {TI=0;TB8=0;SBUF=_ERR_;while(!TI);TI=0;return 0xff;}TI=0; //校验码一致,表明数据接收正确,向主机发送成功信号,函数返回0x00 TB8=0;SBUF=_SUCC_;while(!TI);TI=0;return 0;}void main(){serial_init();while(1){SM2=1; //接收地址帧while(aa!=addr) //从机等待主机请求自己的地址{RI=0;while(!RI);aa=SBUF;RI=0;}TI=0; //一旦被请求,从机返回自己的地址作为应答,等待接收数据 TB8=0;SBUF=addr;while(!TI);TI=0;SM2=0; //接收数据帧aa=0xff; //从机接收数据,并将数据保存到数据缓冲区while(aa==0xff){aa=RECE_data(Buff);}if(aa==0xfe)continue;P1=Buff[1]; //查看接收到的数据}}(3)从机2程序#include<reg51.h>#include<string.h>#define addr 0x02//从机2的地址#define _SUCC_ 0x0f//数据传送成功#define _ERR_ 0xf0//数据传送失败unsigned char aa=0xff;//主机与从机之间通信标志unsigned char Buff[20];//数据缓冲区//串口初始化函数void serial_init(){TMOD=0x20; //定时器1工作于方式2TH1=0xfd;TL1=0xfd; //波特率为9600PCON=0;SCON=0xd0; //串口工作于方式3TR1=1; //开启定时器TI=0;RI=0;}//接收数据函数unsigned char RECE_data(unsigned char *Buff){unsigned char i,temp;unsigned char lenth;unsigned char check;RI=0; //接收数据长度while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;lenth=SBUF;RI=0;check=lenth;for(i=0;i<lenth;i++) //接收数据{while(!RI);if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;Buff[i]=SBUF;check=check^(Buff[i]);RI=0;}while(!RI); //接收校验字节if(RB8==1) //若接收到地址帧,则返回0xfereturn 0xfe;temp=SBUF;RI=0;check=temp^check; //将从主机接收到的校验码与自己计算的校验码比对if(check!=0) //校验码不一致,表明数据接收错误,向主机发送错误信号,函数返回0xff {TI=0;TB8=0;SBUF=_ERR_;while(!TI);TI=0;return 0xff;}TI=0; //校验码一致,表明数据接收正确,向主机发送成功信号,函数返回0x00 TB8=0;SBUF=_SUCC_;while(!TI);TI=0;return 0;}void main(){serial_init();while(1){SM2=1; //接收地址帧while(aa!=addr) //从机等待主机请求自己的地址{RI=0;while(!RI);aa=SBUF;RI=0;}TI=0; //一旦被请求,从机返回自己地址作为应答,等待接收数据TB8=0;SBUF=addr;while(!TI);TI=0;SM2=0; //接收数据帧aa=0xff; //从机接收数据,并将数据保存到数据缓冲区while(aa==0xff){aa=RECE_data(Buff);}if(aa==0xfe)continue;P1=Buff[2]; //查看接收到的数据}}。

51单片机的多机通信原理1. 什么是51单片机的多机通信?51单片机的多机通信是指在多个51单片机之间进行数据传输和通信的过程。
通过多机通信,可以实现不同单片机之间的数据共享和协作,从而实现更加复杂的功能。
2. 多机通信的原理是什么?多机通信的原理是通过串口进行数据传输。
在多个单片机之间,可以通过串口进行数据的发送和接收。
通过定义好的协议,可以实现数据的传输和解析,从而实现多机之间的通信。
3. 多机通信的步骤是什么?多机通信的步骤包括以下几个方面:(1)定义好通信协议:在多机通信之前,需要定义好通信协议,包括数据的格式、传输方式等。
(2)设置串口参数:在单片机中,需要设置好串口的参数,包括波特率、数据位、停止位等。
(3)发送数据:在发送数据之前,需要将数据按照协议进行格式化,然后通过串口发送出去。
(4)接收数据:在接收数据之前,需要设置好串口的中断,然后在中断中接收数据,并按照协议进行解析。
(5)处理数据:在接收到数据之后,需要对数据进行处理,包括数据的存储、显示等。
4. 多机通信的应用场景有哪些?多机通信的应用场景非常广泛,包括以下几个方面:(1)智能家居系统:通过多机通信,可以实现智能家居系统中不同设备之间的数据共享和协作。
(2)工业控制系统:在工业控制系统中,多机通信可以实现不同设备之间的数据传输和控制。
(3)智能交通系统:在智能交通系统中,多机通信可以实现不同设备之间的数据共享和协作,从而实现更加智能化的交通管理。
(4)机器人控制系统:在机器人控制系统中,多机通信可以实现不同机器人之间的数据传输和控制,从而实现更加复杂的任务。
5. 多机通信的优缺点是什么?多机通信的优点包括以下几个方面:(1)实现数据共享和协作:通过多机通信,可以实现不同设备之间的数据共享和协作,从而实现更加复杂的功能。
(2)提高系统的可靠性:通过多机通信,可以实现数据的备份和冗余,从而提高系统的可靠性。
(3)提高系统的扩展性:通过多机通信,可以实现系统的模块化设计,从而提高系统的扩展性。
单片机多机通信的原理一、引言随着科技的发展,单片机在各个领域中得到了广泛的应用。
而多机通信作为单片机应用的重要组成部分,对于实现系统的互联互通起着至关重要的作用。
本文将介绍单片机多机通信的原理。
二、单片机多机通信的概念单片机多机通信是指在多个单片机之间进行数据交换和传输的过程。
通过多机通信,不同的单片机可以实现相互之间的数据传输和共享,从而协同工作,提高系统的整体性能。
三、多机通信的基本原理1. 通信协议:多机通信的实现离不开通信协议的支持。
通信协议规定了数据的格式、传输方式和通信规则等,确保数据能够正确、高效地传输。
常见的通信协议有UART、SPI、I2C等。
2. 硬件连接:多机通信需要通过物理连接来实现。
通常使用串口、总线等方式进行连接。
通过连接线将多个单片机连接在一起,形成一个通信网络。
3. 主从模式:多机通信中通常存在主从模式。
主机负责控制整个通信过程,从机负责接收和处理主机发送的数据。
主机发送命令或请求,从机接收并返回响应。
这样可以实现通信的协同工作。
4. 数据传输:在多机通信过程中,数据的传输是核心环节。
主机将数据封装成指令或数据包发送给从机,从机接收到数据后进行解析和处理,然后返回相应的结果给主机。
数据的传输可以通过串口、总线等方式进行。
5. 数据校验:为了确保数据的正确性,在数据传输过程中需要进行校验。
常见的校验方式有奇偶校验、CRC校验等。
通过校验,可以检测出数据传输过程中产生的错误,保证数据的准确性。
四、多机通信的应用场景1. 工业控制:在工业自动化领域中,常常需要多个单片机之间进行数据交换和传输。
通过多机通信,可以实现各个设备之间的协同工作,提高生产效率和质量。
2. 物联网:在物联网应用中,多机通信可以实现各个终端设备之间的数据传输和共享。
通过多机通信,可以实现智能家居、智能交通等应用场景。
3. 军事领域:在军事系统中,多机通信可以实现指挥系统和各个终端之间的数据交互。
通过多机通信,可以实现指挥决策的快速响应和准确执行。
单片机的双机串口通信原理单片机的双机串口通信原理是通过串口连接两个单片机,使它们能够进行数据的传输和通信。
串口是一种常见的通信方式,它使用两条信号线进行数据的传输:一条是串行数据线(TXD),用于发送数据;另一条是串行接收线(RXD),用于接收数据。
通过串口通信,两个单片机可以进行双向的数据传输,实现信息的互相交流和共享。
在双机串口通信中,一台单片机充当主机(Master),另一台单片机充当从机(Slave)。
主机负责发起通信请求并发送数据,从机负责接收并响应主机发送的数据。
通信过程中,主机和从机需要遵守相同的协议和通信规则,以确保数据的正确和可靠传输。
双机串口通信的主要步骤如下:1. 端口初始化:在双机串口通信开始之前,两台单片机的串口端口需要初始化。
主机和从机需要设置相同的波特率(Baud Rate),数据位数(Data Bits)、停止位数(Stop Bits)和校验方式(Parity Bit),确保两台单片机之间的通信能够正常进行。
2. 数据发送:主机将要发送的数据写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给从机。
主机发送完所有数据位后,等待从机的响应。
3. 数据接收:从机通过串口接收线路接收主机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待从机的处理。
4. 数据处理:从机接收到主机发送的数据后,根据通信协议和通信规则进行数据处理。
从机可能需要对数据进行校验、解析和执行相应的操作,然后将处理结果写入到串口发送寄存器中,以供主机进行相应的处理。
5. 响应发送:从机将处理结果写入到串口发送寄存器中,然后通过串口发送线路将数据位一位一位地发送给主机。
从机发送完所有数据位后,等待主机的进一步操作。
6. 数据接收:主机通过串口接收线路接收从机发送的数据位,然后将接收到的数据位存放在串口接收寄存器中,等待主机的处理。
7. 数据处理:主机接收到从机发送的数据后,根据通信协议和通信规则进行数据处理。
单片机多机通信在单片机多机通信过程中,PC机将指令打包后发给智能接口单元(以下简称主单片机)。
主单片机收到完整一包后将包解开,按对每个从机的指令分别发送,同时将各从机发给PC机的指令送给PC机。
由于64个从机和主单片机使用同一串口通信线,为避免发生冲突,主单片机处于主动状态,按一定的定时间隔与每一台从机顺序通信。
主单片机在与每一台从机通信过程中先发送地址,从机收到地址后若与自己的地址一致,则继续接收主单片机发来的一个字节的命令码,从机收到命令后,将自己的一个字节的命令发送到主单片机。
主单片机完成与64个从机的通信需要64个定时间隔,只要定时间隔足够短,主单片机与从机基本上可以实现实时通信。
在整个通信过程中,主单片机起着通信枢纽的作用。
单片机多机通信过程安排如下:使所有从机的SM2位置1,处于只接收地址帧的状态;主机发送一帧地址信息,其中包含8位地址,第9位为地址、数据标志位,第9位置1表示发送的是地址;从机接收到地址帧后,各自将所接收的地址与本从机的地址相比较,对于地址相符的从机,使SM2清0以接收主机随后发来的信息,对于地址不相符的从机,仍保持SM2=1状态,对主机随后发送的数据不予理睬,直至发送新的地址帧;主机发送控制指令与数据,给被寻址的从机数据帧的第9位置0,表示发送的是数据。
�单片机程序采用PLM51语言设计,主单片机定时中断服务程序框图如图4所示。
主单片机RS-485串行口接收和发送中段服务程序框图如图5所示。
主单片机RS-232C串行口接收中断服务程序如图6所示。
从单片机RS-485串行口接收和发送中段服务程序框图如图7所示。
主单片机在主程序中以查询方式将各从机送来的数据从内存中读出后顺序发送给上位PC机。
程序清单略。
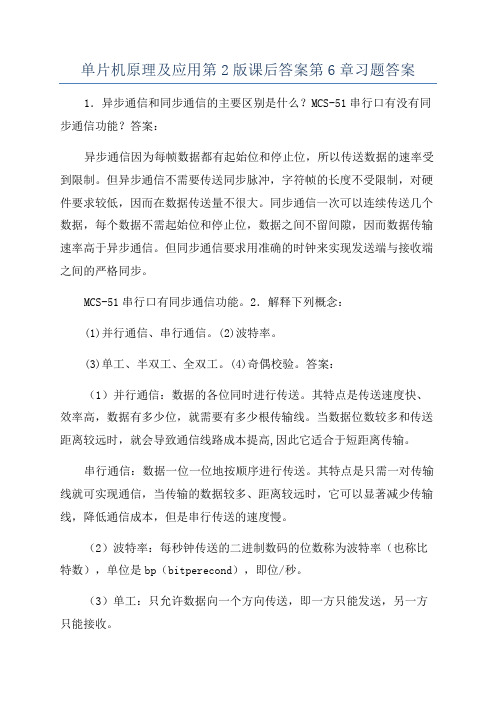
图1 RS485通信接口原理图2 单片机多机通信硬件电路设计中需注意的问题2.1 电路基本原理某节点的硬件电路设计如图1所示,在该电路中,使用了一种RS-485接口芯片SN75LBC184,它采用单一电源Vcc,电压在+3~+5.5 V范围内都能正常工作。
单片机双机通信原理双机通信是指通过单片机(Microcontroller,MCU)系统中的串行通信接口,在两个单片机之间进行数据传输和交换的过程。
其中一个单片机被定义为主机(Master),另一个被定义为从机(Slave)。
双机通信可以实现不同单片机之间的数据共享和协作,使得系统具备更高的可靠性、灵活性和性能。
在双机通信的原理中,主机负责发起通信和控制通信过程,从机负责接收主机发送的指令并执行相应的操作。
通信的过程一般包括以下几个步骤:1. 主机初始化:主机在通信开始前需要进行初始化设置,包括选择合适的通信波特率(Baud Rate),设置通信参数和接收/发送缓冲区等。
2. 建立连接:主机通过发送一个特定的请求信号来与从机建立通信连接。
请求信号可以是一个特定的命令码或者特定的数据帧。
3. 从机响应:从机接收到主机发送的请求信号后,通过发送一个响应信号来回复主机。
响应信号可以是一个应答码或者相应的数据帧。
4. 数据传输:一旦建立了连接并完成了响应过程,主机和从机可以开始进行数据传输。
主机通过发送数据帧给从机,从机则接收并处理这些数据。
5. 错误处理:在数据传输过程中,可能会发生数据错误或者通信错误。
主机和从机通过相应的机制(如校验和)来检测和处理这些错误,以保证通信的可靠性和准确性。
6. 断开连接:当数据传输完成后,主机和从机可以通过发送断开连接的信号来结束通信过程。
断开连接的信号可以是特定的命令码或者特定的数据帧。
总的来说,双机通信的原理是通过主机和从机之间的串行通信接口进行数据传输和交换。
通过建立连接、数据传输和断开连接等步骤,实现两个单片机之间的数据共享和协作。
这种通信方式广泛应用于各种嵌入式系统中,如智能家居系统、工业自动化系统等。
单片机多机通信原理简述
简述单片机多机通信的原理。
答:若置SM2=1,则允许多机通信。
多机通信协议规定,第9位数据(D8)为1,说明本帧数据为地址帧;若第9位为0,则本帧为数据帧。
当一片
89C52(主机)与多片89C5l(从机)通信时,所有从机的SM2位都置l。
主机首先发送的一帧数据为地址,即某从机机号,其中第9位为1,所有的从机接收到数据后,将其中第9位装入RB8中。
各个从机根据收到的第9位数据(RB8中)的值来决定从机可否再接收主机的信息。
若(RB8)=0,说明是数据帧,则使接收中断标志位RI=0,信息丢失;若(RB8)=1,说明是地址帧,数据装入SBUF并置RI=1,中断所有从机,被寻址的目标从机清除SM2,以接收主机发来的一帧数据。
其他从机仍然保持SM2=1。