三点一维搜索法报告
- 格式:docx
- 大小:45.59 KB
- 文档页数:2
机械优化设计_第三章一维搜索方法一维方法是一种常用的优化方法,适用于在一个单变量的空间中寻找最优解或近似最优解的问题。
在机械优化设计中,一维方法可以用来寻找最佳的设计参数值,以优化机械系统的性能。
一维方法包括了多种常用的算法,如二分法、黄金分割法、斐波那契法等。
下面将介绍其中的二分法和黄金分割法这两种常用的一维方法。
二分法是一种简单而常用的方法,基本思想是不断将空间划分为两部分,直到找到最优解或接近最优解的区间。
具体步骤如下:1.初始化区间[a,b],其中a和b分别是空间的下界和上界。
2.计算区间的中点x=(a+b)/23.根据目标函数的取值情况,确定最优解或接近最优解所在的子区间。
4.更新区间为[a,x]或[x,b],继续步骤2和3,直到区间足够小或找到了最优解。
二分法的优点是简单易实现,但其收敛速度相对较慢,特别是对于空间为初值范围较大的问题。
黄金分割法是一种相对高效的一维方法,其基本思想是通过黄金分割点来确定区间的缩减比例。
具体步骤如下:1.初始化区间[a,b],其中a和b分别是空间的下界和上界。
2.计算区间的两个黄金分割点,即x1=a+(1-φ)(b-a)和x2=a+φ(b-a),其中φ是黄金分割比例,其取值约为0.6183.根据目标函数的取值情况,确定最优解或接近最优解所在的子区间。
4.更新区间为[x1,b]或[a,x2],同时更新黄金分割点,继续步骤2和3,直到区间足够小或找到了最优解。
黄金分割法的优点是收敛速度相对较快,通常比二分法更有效。
然而,其实现相对复杂一些,需要额外的计算和判断步骤。
除了二分法和黄金分割法,还有其他一维方法,如斐波那契法、插值法等。
这些方法可以根据具体问题的特点选择适合的方法进行优化设计。
总结起来,一维方法是机械优化设计中常用的方法之一,用于在一个单变量的空间中寻找最优解或近似最优解的问题。
通过选择适当的方法,可以有效地优化机械系统的性能。

【最新整理,下载后即可编辑】第四章 一维搜索法由第一章关于求解最优化问题概述中我们知道,从已知迭代点n k R X ∈出发按照基本迭代公式k k k k P t X X +=+1来求解最优化问题,其关键在于如何构造一个搜索方向n k R P ∈和确定一个步长1R t k ∈,使下一迭代点1+k X 处的目标函数值下降,即)()(1k k X f X f <+.现在我们来讨论,当搜索方向k P 已经确定的情况下,如何来确定步长k t ?步长因子的选取有多种方法,如取步长为常数,但这样选取的步长并不最好,如何选取最好步长呢?实际计算通常采用一维搜索来确定最优步长. 对无约束最优化问题)(min X f nR X ∈,当已知迭代点kX 和下降方向k P 时,要确定适当的步长k t 使=+)(1k X f)(k k k P t X f +比)(k X f 有所下降,即相当于对于参变量t 的函数)()(k k tP X f t +=ϕ要在区间],0[∞+上选取k t t =使)()(1k k X f X f <+,即)0()()()(ϕϕ=<+=k k k k k X f P t X f t .由于这种从已知点k X 出发,沿某一下降的探索方向k P 来确定步长k t 的问题,实质上是单变量函数()t ϕ关于变量t 的一维搜索选取问题,故通常叫做一维搜索.按这种方法确定的步长k t 又称为最优步长,这种方法的优点是,它使目标函数值在搜索方向上下降得最多.今后为了简便起见,我们用记号)(1k k k P X ls X ,=+ (4.1)表示从点k X 出发沿k P 方向对目标函数)(X f 作直线搜索所得到的极小点是1+k X .其中l 和s 分别是Linear search (直线搜索)两词的词首.在目标函数)(X f 已确定的条件下(4.1)等价于如下两式:⎪⎩⎪⎨⎧+==+=++kk k k tk k t k k k P t X X t tP X f P t X f 1)(min )(min )(,ϕ 下面进一步解释迭代点k k k k P t X X +=+1的空间位置.容易证明,若从k X 出发,沿k P 方向进行一维搜索得极小点k k k k P t X X +=+1,则该点1+=k X X 处的梯度方向)(1+∇k X f 与搜索方向k P 之间应满足0)(1=∇+k T k P X f .(4.2)事实上,设)()(k k tP X f t +=ϕ,对t 求导有k T k k P tP X f t )()(+∇='ϕ.令0)('=t ϕ,即0)(=+∇k T k k P tP X f ,所以0)(1=∇+k T k P X f .式(4.2)的几何意义是明显的.从某一点k X 出发沿k P 方向对目标函数)(X f 作直线搜索,所得到的极小点为1+k X .式(4.2)指出,梯度)(1+∇k X f 必与搜索方向k P 正交.又因为)(1+∇k X f 与目标函数过点1+k X 的等值面)()(1+=k X f X f 正交,所以进一步看到,搜索方向k P 与这个等值面在点1+k X 处相切(如图4.1所示).§4.1 搜索区间及其确定方法一、搜索区间设一维最优化问题为)(min max0t t t ϕ≤≤. (4.3)为了求解问题(4.3),我们引入如下的搜索区间概念.定义4.1 设])0[)(0[max **11t t t R R ,,,:∈∞+∈→ϕ,并且 )(min )(max0*t t t t ϕϕ≤≤=,若存在闭区间])0[])([0[][max t b a b a ,,,,⊂∞+⊂使][*b a t ,∈,则称][b a ,是问题(4.3)的搜索区间.简言之,一个一维最优化问题的搜索区间,就是包含该问题最优解的一个闭区间.通常,在进行一维搜索时,一般要先确定出问题的一个搜索区间,然后在此区间中进行搜索求解. 二、加步探索法下面,介绍一个确定问题(4.3)的搜索区间的简单方法.这个方法的思想是:先选定一个初始点])0[)(0[max 00t t t ,或,∈⊂∞+∈和初始步长00>h .然后,沿着t 轴的正方向探索前进一个步长,得到新点00h t +.若目标函数在新点处的值是下降了,即)()(000t h t ϕϕ<+,则下一步就从新点00h t +出发加大步长,再向前探索.若目标函数在新点处的 函数值上升,即)()(000t h t ϕϕ>+,图4.1则下一步仍以0t 为出发点以原步长开始向t 轴的负方向同样探索.当达到目标函数上升的点时,就停止探索,这时便得到问题(4.3)的一个搜索区间.这种以加大步长进行探索来寻找探索区间的方法叫做加步探索法.加步探索法算法的计算步骤:(1) 选取初始数据.选取初始点])0[)(0[max 00t t t ,或,∈⊂∞+∈,计算)(00t ϕϕ=.给出初始步长00>h ,加步系数1α>,令0=k . (2) 比较目标函数值.令k k k h t t +=+1,计算)(11++=k k t ϕϕ,若k k ϕϕ<+1,转(3).否则转(4).(3)加大探索步长.令k k h h α=+1,同时,令k t t =,1+=k k t t ,1k k ϕϕ+=,1k k =+,转(2).(4) 反向探索.若0=k ,转换探索方向,令1,+=-=k k k t t h h ,转(2).否则,停止迭代,令11min{}max{}k k a t t b t t ++==,,,输出][b a ,. 加步探索法算法的流程图如图4.2所示。
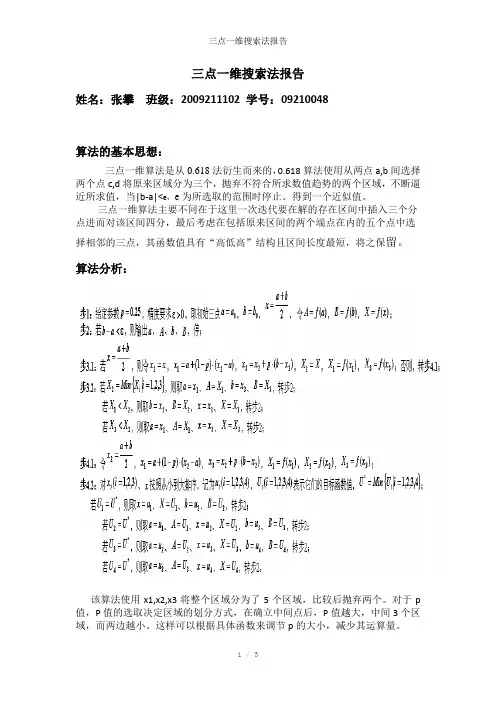
三点一维搜索法报告姓名:张攀班级:2009211102 学号:09210048算法的基本思想:三点一维算法是从0.618法衍生而来的,0.618算法使用从两点a,b间选择两个点c,d将原来区域分为三个,抛弃不符合所求数值趋势的两个区域,不断逼近所求值,当|b-a|<e,e为所选取的范围时停止。
得到一个近似值。
三点一维算法主要不同在于这里一次迭代要在解的存在区间中插入三个分点进而对该区间四分,最后考虑在包括原来区间的两个端点在内的五个点中选择相邻的三点,其函数值具有“高低高”结构且区间长度最短,将之保留。
算法分析:该算法使用x1,x2,x3将整个区域分为了5个区域,比较后抛弃两个。
对于p 值,P值的选取决定区域的划分方式,在确立中间点后,P值越大,中间3个区域,而两边越小。
这样可以根据具体函数来调节p的大小,减少其运算量。
实例分析:选择函数:f[x] := Sin[x^4] + Cos[x]该函数在[0,1]范围内有极小值,令a=0,b=1,p=0.1,e选取1*10^(-9),运算后结果在x=0.4904089750976563时有最小值0.939949。
运算次数为22次,P值选取效率的影响:在该函数中,[0,1]内函数波动较为平缓,从中间缓慢向两边扩展显然速度较快,因为所求点接近终点,当p增大的时能很快覆盖到所求点效率将变高,如果区域远超过所求点则效率将变低。
P取值以及逼近次数i的关系:P=0.1,i=22P=0.2,i=26P=0.25,i=19P=0.3,i=19P=0.35,i=21P=0.4,i=23P=0.5,i=26P=0.6,i=30P=0.7,i=36P=0.8,i=57可见最好的取值应为0.25到0.3之间。
总结:三点一维算法实际通过多次比较,减少了0.618法对点的移动,和对区域的选择,比0.618法稳定。
在比较区域大时三点一维算法比起0.618法更加优秀。
友情提示:范文可能无法思考和涵盖全面,供参考!最好找专业人士起草或审核后使用,感谢您的下载!。


第二章 一维搜索法● 概述● 确定初始单谷区间的进退法 ● 一维搜索法分类 ● 区间消去法 ● 函数逼近法概述求一元函数()F x 的极小点和极小值问题就是一维最优化问题。
求解一维优化问题的方法称为一维优化方法,又称一维搜索法。
一维搜索法是优化问题中最简单、最基本方法。
因为它不仅可以解决单变量目标函数的最优化问题,而且在求多变量目标函数的最优值时,大多数方法都要反复多次地进行一维搜索,用到一维优化法。
一般多维优化计算的迭代的基本格式:从一个已知点()k x 出发(()k x由上次迭代获得,开始时就是起始点(0)x),沿某一优化方法所规定的是目标函数值下降的搜索方向()k S,选择一个步长因子α,求得下一个新迭代点(1)k x +,(1)()()k k k xx S α+=+并且满足1()()k k F x F x +≤,即新点必须能够使目标函数值有所下降,这个新点就是下一次迭代的出发点,如此重复,直到求出目标函数的最优解为止。
理想步长kα可以通过()()()()k k F F x S αα=+的极小点获得min ()F α,使得目标函数达到最小()()min ()k k F x S α+,这种在第k 次迭代中求理想步长k α的过程,就是一维搜索过程。
大致分为两个步骤:1. 确定初始搜索区域[a,b],该区域应该包括一维函数极小点在内的单谷区域;2. 在单谷区域[a,b]上寻找极小点。
寻找极小点kα可以采用解析解和数值解等方法。
确定初始单谷区间的进退法单谷区域的定义:设函数()F x 在区域12[,]x x 内有定义,且(1) 在区域12[,]x x 内存在极小值x *,既有min ()()F x F x *=,12[,]x x x ∈; (2) 对区域1[,]x x *上任意自变量x ,有()()F x F x x >+∆,0x ∆>;对区域2[,]x x *上任意自变量x ,有()()F x F x x <+∆,0x ∆>;则称12[,]x x 为函数()F x 的单谷区域。
实验一一维搜索方法
一、概述:
求解一维目标函数最优解的过程称为一维搜索或一维优化;所采用的方法就称为一维搜索方法或一维优化方法。
它是各种优化方法中最简单而又最基本的方法,不仅用来解决一维目标函数的求优问题,而且多维优化问题通常也是转化为若干次一维优化问题来处理,同时多维优化问题每次迭代计算过程中,每前进一步都要应用一维寻优方法确定其最优步长。
一维搜索方法可分为两大类,一类称作试探法,有黄金分割法(0.618法)、裴波纳契(Fibonacci)法等;另一类称作插值法或函数逼近法,有二次插值法、三次插值法等。
二、实验目的:
1)加深对一维搜索方法的基本理论和算法步骤的理解。
2)培养学生独立编制计算机程序的能力。
三、实验设备:
微机(P4配置),C语言(Turbo C)或Visual C软件。
四、实验内容:
练习一维搜索方法(黄金分割法和二次插值法任选一种)。
编程求函数F(x)=8x3-2x2-7x+3的最优解,搜索起始点为x=0,基本步长h=0.1, 收敛精度ε=0.001。
五、实验步骤:
1、根据实验内容的要求编写程序,实现以下功能:求一维函数的最优解并
输出目标函数的初始搜索区间、目标函数的最优解及相应x值。
2、将程序输入计算机并运行、调试,得到所要结果。
记录程序及运行结果。
实验报告一、一维搜索方法的基本原理:
二、自编源程序及运行结果:。
一维优化算法数学实验报告数学实验实验报告实验名称一维优化算法比较班级2022211122学号2022210532姓名朱海潮一、实验概述:【问题简述】有关“三点一维搜索”、“改进的抛物线法”两个优化算法,你可以选择其中一个,也可以将二者统一考虑。
需要你编程实现(注:课件所附程序仅作参考,存在瑕疵),选择适当的算例进行测试,就你所得到的实验结果给出翔实的报告——当然,你可以给出可能的改进性算法及其相应的数值结果。
【实验目的】熟悉使用mathmatic软件进行计算机模拟的方法,掌握在该环境下的编程办法。
掌握三种一维优化算法。
【实验环境】WolframMathamtic9.0二、实验内容:【算法】0.618算法步骤:三点一维搜索步骤:改进的抛物线算法:【程序代码】【实验步骤】实验讨论两个问题1.对于函数,讨论当α取不同值时算法的效率(即迭代次数)。
2.对于三点一维搜索算法,讨论当p取不同值时算法的效率。
每次进行100次计算,然后取100次的平均值作为最终结果。
首先编写三种搜索算法的函数,然后通过改变α获得不同α时的结果(α取0到7),并作图。
同理,改变p获得不同p时三点一维算法的搜索结果(),并作图。
三.实验总结【实验结论】图1三点一维算法在取不同p值时的迭代次数如图1所示,在p取0.25左右时,迭代次数最小,此时三点一维算法的效率最好。
图2三种算法在α取不同值时的迭代次数如图2所示,在p取0.25时,三点一维搜索算法的波动较小且迭代次数较少;而0.618算法的迭代次数多且波动较大,算法不稳定;改进的抛物线算法在α取不同值时迭代次数改变很大。
综上所述,三点一维算法可以说是最好的算法。
【实验小结】通过实验,掌握了三种一维搜索算法,并且比较了三种算法的优劣,最后得出了三点一维搜索算法为较好的算法的结论。
三点一维搜索法报告
姓名:张攀班级:2009211102 学号:09210048
算法的基本思想:
三点一维算法是从0.618法衍生而来的,0.618算法使用从两点a,b间选择两个点c,d将原来区域分为三个,抛弃不符合所求数值趋势的两个区域,不断逼近所求值,当|b-a|<e,e为所选取的范围时停止。
得到一个近似值。
三点一维算法主要不同在于这里一次迭代要在解的存在区间中插入三个分点进而对该区间四分,最后考虑在包括原来区间的两个端点在内的五个点中选择
相邻的三点,其函数值具有“高低高”结构且区间长度最短,将之保留。
算法分析:
该算法使用x1,x2,x3将整个区域分为了5个区域,比较后抛弃两个。
对于p 值,P值的选取决定区域的划分方式,在确立中间点后,P值越大,中间3个区域,而两边越小。
这样可以根据具体函数来调节p的大小,减少其运算量。
实例分析:
选择函数:f[x] := Sin[x^4] + Cos[x]
该函数在[0,1]范围内有极小值,令a=0,b=1,p=0.1,e选取1*10^(-9),运算后结果在x=0.4904089750976563时有最小值0.939949。
运算次数为22次,
P值选取效率的影响:
在该函数中,[0,1]内函数波动较为平缓,从中间缓慢向两边扩展显然速度较快,因为所求点接近终点,当p增大的时能很快覆盖到所求点效率将变高,如果区域远超过所求点则效率将变低。
P取值以及逼近次数i的关系:
P=0.1,i=22
P=0.2,i=26
P=0.25,i=19
P=0.3,i=19
P=0.35,i=21
P=0.4,i=23
P=0.5,i=26
P=0.6,i=30
P=0.7,i=36
P=0.8,i=57
可见最好的取值应为0.25到0.3之间。
总结:
三点一维算法实际通过多次比较,减少了0.618法对点的移动,和对区域的选择,比0.618法稳定。
在比较区域大时三点一维算法比起0.618法更加优秀。