异步电动机矢量控制系统
- 格式:doc
- 大小:60.50 KB
- 文档页数:3
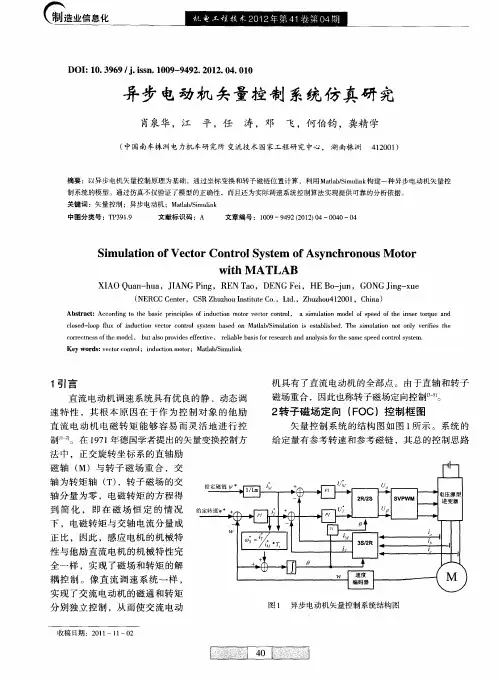
异步电机矢量控制原理一、引言异步电机是一种广泛应用的电动机,其控制方式主要有直接转矩控制和矢量控制两种。
其中,矢量控制是一种更加精确、灵活的控制方式,可以实现高效率、高性能的运行。
本文将详细介绍异步电机矢量控制原理。
二、异步电机基础知识1. 异步电机结构和工作原理异步电机由定子和转子两部分组成,定子上有三个相位交流绕组,转子上则有导体条。
当三相电源施加在定子上时,会产生旋转磁场,进而感应出转子中的感应电动势,并使得导体条在旋转磁场中感受到一个旋转力矩,从而带动转子运动。
2. 异步电机参数异步电机的参数包括定子电阻、定子漏抗、定子互感、转子漏抗等等。
这些参数对于确定异步电机的特性非常重要。
3. 感应电动势和反电动势当三相交流电源施加在定子上时,会产生一个旋转磁场,并且这个旋转磁场的频率与供电频率相同。
这个旋转磁场会感应出转子中的感应电动势,从而产生一个旋转力矩。
同时,由于异步电机的运动,转子中也会产生一个反电动势,其大小与运动速度成正比。
三、矢量控制基础知识1. 矢量控制简介矢量控制是一种通过模拟直流电机的方式来控制交流电机的方法。
它可以实现非常精确的控制,并且可以根据需要调整转速和转矩。
2. 矢量控制原理在矢量控制中,将交流电机看作一个带有两个分量(即直流分量和交流分量)的向量。
通过对这两个分量进行分别控制,就可以实现对交流电机的精确控制。
四、异步电机矢量控制原理1. 矢量控制与异步电机结合在异步电机中使用矢量控制时,需要将交流电源输入到变频器中,并将其输出到异步电机上。
变频器会将交流信号转换为直流信号,并将其分解为两个分量:一个用于产生旋转磁场(即定子磁通),另一个用于产生反向转矩(即转子电流)。
2. 矢量控制中的定子电流和磁通在矢量控制中,定子电流和磁通是非常重要的参数。
定子电流决定了旋转磁场的大小,而磁通则决定了旋转磁场的方向。
因此,在进行异步电机矢量控制时,需要对定子电流和磁通进行精确控制。
目录摘要I1绪论11.1交流调速技术概况11。
2异步电动机矢量控制原理22矢量控制理论42.1矢量控制42.2异步电机的动态数学模型52.3坐标变换73矢量控制系统硬件设计93。
1矢量控制结构框图93.2矢量控制系统的电流闭环控制方式思想9 3。
3各个子系统模块103.4矢量控制的异步电动机调速系统模块124 SIMULINK仿真134.1MATLAB/S IMULINK概述134。
2仿真参数134。
3仿真结果145总结16参考文献17摘要异步电机的物理模型之所以复杂,关键在于各个磁通间的耦合。
本设计把异步电动机模型解耦成有磁链和转速分别控制的简单模型,就可以模拟直流电动机的控制模型来控制交流电动机。
综合矩阵变换的控制策略及异步电动机转子磁场定向理论,采用计算机仿真方法分别建立了矩阵变换仿真模型以及基于矩阵变换的异步电动机矢量控制系统仿真模型,对矩阵变换的控制原理、输入、输出性能以及矢量控制系统的优质的抗扰能力及四象限运行特性进行分析验证,展现了该新型交流调速系统的广阔发展前景,并针对基于矩阵变换的异步电动机矢量控制系统的特点,着重对矢量控制单元进行了软件设计。
直接矢量控制就是一种优越的交流电机控制方式,它模拟直流电机的控制方式使得交流电机也能取得与直流电机相媲美的控制效果.本文研究了矢量控制系统中磁链调节器的设计方法。
并用MATLAB最终得到了仿真结果。
关键词:坐标变换;矢量控制;MATLAB/simulink1绪论1.1交流调速技术概况工农业生产、交通运输、国防军事以及日常生活中广泛应用着电机传动,其中很多机械有调速要求,如车辆、电梯、机床及造纸机械等,而风机、水泵等为了减少损耗,节约电能也需要调速。
过去由于直流调速系统调速方法简单、转矩易于控制,比较容易得到良好的动态特性,因此高性能的传动系统都采用直流电机,直流调速系统在变速传动领域中占统治地位。
但是直流电机的机械接触式换向器结构复杂、制造成本高、运行中容易产生火花、需要经常的维护检修,使得直流传动系统的运营成本很高,特别是由于换向问题的存在,直流电机无法做成高速大容量的机组,如目前3000转/分左右的高速直流电机最大容量只有400千瓦左右,低速的也只能做到几千千瓦,远远不能适应现代生产向高速大容量化发展的要求.交流电机高效调速方法的典型是变频调速,它既适用于异步电机,也适用于同步电机.交流电机采用变频调速不但能实现无极调速,而且根据负载的特性不同,通过适当调节电压和频率之间的关系,可使电机始终运行在高效区,并保证良好的动态特性。
异步电动机矢量控制_FOC_和直接转矩控制_DTC_方案的比较首先,我们来看看FOC方案。
FOC方案是基于电机矢量控制理论而发展起来的一种控制方法,在控制异步电动机时,可以通过精确测量和控制转子磁链矢量的方向和大小,来实现精确控制电机的转矩和转速。
其核心思想是将电动机的三相定子电流进行矢量拆分,分为一个磁场矢量和一个转矩矢量,从而实现转子磁链方向和大小的控制。
FOC方案的优点是控制精度高,响应速度快。
由于可以实时测量和控制电机的磁链矢量,FOC方案可以精确控制电机的转矩和转速。
此外,由于转子磁链矢量可以根据需要即时调整,FOC方案可以快速响应转矩和速度的变化,从而适用于需要快速响应和精确控制的应用。
然而,FOC方案也存在一些缺点。
首先,FOC方案的实现较为复杂,需要进行电流和电压的矢量控制,以及相应的转子定位和速度估算算法。
这些复杂的控制算法在实践中需要较高的计算能力和较多的计算资源,因此实现起来较为困难。
其次,FOC方案对于电机参数和系统模型的准确性要求较高。
由于FOC方案需要测量和控制转子磁链矢量,因此对电机参数和系统模型的准确性要求较高,如果参数不准确,将导致控制性能下降。
接下来,我们来看看DTC方案。
DTC方案是一种基于直接转矩控制原理的控制方法,其核心思想是通过采用转矩和磁链两个控制变量直接控制电机的转矩和速度。
DTC方案通过测量和计算磁链和转矩的误差,根据预定的控制规则直接调节电机的电压和频率,以实现对电机转矩和速度的控制。
DTC方案的优点是实现简单,控制快速。
DTC方案不需要进行电流和电压的矢量控制,只需要测量和控制磁链和转矩的误差,因此实现起来相对简单。
此外,DTC方案由于直接控制电机的电压和频率,可以快速响应转矩和速度的变化,适用于需要快速相应和简单控制的应用。
然而,DTC方案也存在一些缺点。
首先,DTC方案的动态性能较差。
由于DTC方案是基于磁链和转矩误差进行控制的,其控制性能受到不可避免的误差和延迟的影响,因此其动态性能较差,不能达到FOC方案的精确度和响应速度。
异步电动机矢量控制的基本思路1. 什么是异步电动机?大家好,今天我们来聊聊异步电动机,听上去是不是有点生涩?其实,这个词儿就像一杯淡淡的咖啡,虽然乍一看不怎么样,但细品之下却充满了风味。
异步电动机,顾名思义,它的转速并不是和电源频率完全一致的。
简单点说,就是电机的转速和电网的频率有点“拉锯”,就像朋友之间的小争执,谁也不愿意让步。
它是我们生活中常见的电动机之一,广泛应用于各种机械设备,比如空调、洗衣机,还有咱们家里常用的电风扇。
1.1 异步电动机的工作原理说到工作原理,这个就像是每个电动机的小秘密。
它是利用电流通过线圈产生磁场,与转子之间的相互作用来实现转动的。
可以想象一下,当你在滑冰场上,滑冰者的动作和滑冰场的冰面就像电机和电源之间的关系。
电流通过定子线圈,形成旋转磁场,而转子则在这个磁场的“引导”下开始转动。
虽然这个过程听起来复杂,但其实它的运行就像在舞池里跳舞一样,只要节奏对了,所有的一切就会顺畅无比。
1.2 为何要用矢量控制?那么,矢量控制又是什么呢?听起来像是高大上的术语,其实就是让电动机更聪明、表现更好的一种方法。
咱们都知道,电动机的性能好不好,转速和扭矩是关键。
这就像是赛车比赛,车速和加速度决定了谁能先冲过终点线。
而矢量控制的核心就在于将电机的电流分解成两个部分:一个是产生转矩的部分,另一个是控制磁场的部分。
通过这样的方式,我们就能精准地控制电机的运行状态,确保它能在各种条件下都表现得游刃有余,简直就像是专业赛车手在赛道上飞驰,毫无压力。
2. 矢量控制的基本原理接下来,我们聊聊矢量控制的基本原理。
想象一下,你在玩一款射击游戏,敌人四处移动,而你需要精准瞄准才能一枪命中。
矢量控制的思路就是这样,通过实时监测电机的状态,动态调整控制策略,确保电机能够适应不同的负载和运行环境。
它主要依靠两个重要的参数:电流和电压。
通过控制这两个参数,我们就能精确调节电机的运行状态。
2.1 参考框架矢量控制可以看作是建立在一个参考框架上的。
基于Matlab/Simulink 的异步电机矢量控制系统仿真摘要在异步电机的数学模型分析中以及矢量控制系统的基础之上,利用Matlab/Simulink运用建立模块的思想分别组建了坐标变换模块、PI调节模块、转子磁链个观测模块、SVPWM等模块,然后将这些模块有机的结合,最后构成了异步电动机矢量控制的仿真模块,并且进行了仿真验证。
仿真结果分别显示了电机空载与负载情况下转矩、转速的动态变化曲线,验证了该方法的有效性、实用性,为电机在实际使用中打下了坚实的基础。
本文主要研究异步电机在矢量控制下的仿真。
使用Matlab/Simulink中的电气系统模块(PowerSystem Blocksets)将其重组得到新的模型并对其仿真,最后分析仿真结果得出结论。
关键词: 异步电机矢量控制 MATLAB/SIMULINK 变频调速目录摘要 (I)Abstract......................................................................................... 错误!未定义书签。
1 绪论 (1)1.1 电机及电力拖动技术的发展概况 (1)1.2 异步电动机的控制技术现状................................................. 错误!未定义书签。
1.3 仿真软件的简介及其选择..................................................... 错误!未定义书签。
1.4 论文的主要内容及结构安排................................................. 错误!未定义书签。
2 异步电动机的数学模型 (4)2.1 异步电动机的稳态数学模型 (4)2.2 异步电动机的动态数学模型 (5)2.3 本章小结 (7)3 矢量控制系统基本思路 (8)3.1 矢量控制的基本原理 (8)3.2 坐标变换 (9)3.3SVPWM调制 (21)3.3本章小结 (11)4 异步电机矢量控制系统仿真 (14)4.1矢量控制系统模型 (14)4.2仿真结果与分析 (15)4.5本章小结 (17)5结论与展望 (18)5.1结论 (18)5.2后续研究工作的展望 (19)参考文献 ....................................................................................... 错误!未定义书签。
异步电机的矢量控制引言异步电机是一种常用的电动机类型,多用于工业领域。
在控制异步电机的过程中,矢量控制技术被广泛应用。
本文将详细介绍异步电机的矢量控制原理及其应用。
矢量控制原理1.矢量控制概述矢量控制是一种基于电机磁链方向和大小的控制技术。
通过控制电机转子磁链,可以实现电机的启动、停止、加速、减速等控制操作。
2.矢量控制基本原理矢量控制的基本原理是通过实时测量电机的电流、转速、位置等参数,实现对电机转子磁链的实时控制。
控制器根据测量值计算出所需的电流矢量,并通过逆变器向电机施加相应的电流,使电机实现特定的运动。
矢量控制的参数测量与计算1.电机电流测量电机电流是矢量控制的重要参数之一。
可以通过采样电机两相之间的电压,利用欧姆定律计算得到电机电流。
2.电机转速测量电机转速测量可以通过安装编码器或霍尔传感器来实现。
编码器可以直接测量电机转子的位置,通过计算单位时间内的位置变化,可以得到电机转速。
3.电机位置测量电机位置测量可以通过编码器或霍尔传感器来实现。
编码器可以直接测量电机转子的位置,通过计算单位时间内的位置变化,可以得到电机位置。
4.电机磁链计算电机磁链可以通过测量电机的电流和电压来计算。
根据电机的等效电路模型,可以得到电机磁链的表达式。
矢量控制策略1.矢量控制模型矢量控制模型包括电流模型和转矩模型。
电流模型用于控制电机的电流矢量,转矩模型用于控制电机的转矩。
2.电流闭环控制电流闭环控制是矢量控制的重要组成部分。
通过对电机电流进行实时的测量、采样和控制,可以实现对电机转矩和速度的精确控制。
3.磁链闭环控制磁链闭环控制是矢量控制的关键环节。
通过对电机磁链进行实时的测量、采样和控制,可以实现对电机的磁场方向和大小的精确控制。
4.转速闭环控制转速闭环控制是矢量控制的基本要求之一。
通过对电机转速进行实时的测量、采样和控制,可以实现对电机速度和位置的精确控制。
矢量控制的应用1.电动汽车矢量控制技术在电动汽车中得到广泛应用。
基于Matlab/Simulink异步电机矢量控制系统仿真1、Matlab仿真程序及各仿真系统工作原理首先,读懂本文献并结合相关参考文献,分析异步电机矢量控制系统机构原理。
1.1矢量控制系统分析矢量控制系统的基本思路是以产生相同的旋转磁动势为准则,将异步电动机在静止三相坐标系上的定子交流电流通过坐标变换等效成同步旋转坐标系上的直流电流,并分别加以控制,从而实现磁通和转矩的解耦控制,以达到直流电机的控制效果。
所谓矢量控制,就是通过矢量变换和按转子磁链定向,得到等效直流电动机模型,在按转子磁链定向坐标系中,用直流电动机的方法控制电磁转矩与磁链,然后将转子磁链定向坐标系中的控制量经变换得到三相坐标系的对应量,以实施控制。
其中等效的直流电动机模型如图1所示,在三相坐标系上的定子交流电流i A、i B、i C,通过3/2变换可以等效成两相静止正交坐标系上的交流i sα和i sβ,再通过与转子磁链同步的旋转变换,可以等效成同步旋转正交坐标系上的直流电流i sm和i st。
图1矢量控制系统原理结构图其次,原理分析清楚后,利用Matlab/Simulink强大的仿真能力,建立交流异步电机控制系统的仿真模型。
由于老师所给文献篇幅有限,学生又查阅了相关文献,结合其他相关文献,将控制系统分为几个功能模块:转速调节模块、定子电流励磁分量模块、定子电流转矩分量调节模块和坐标变换模块等,将这些模块有机组合,就可在Matlab/Simulink中搭建出交流异步电机系统的仿真模型。
1.2转速(ASR)调节模型图2 转速控制模型1.3磁链(APsirR、ACMR)控制模型图3 磁链控制模型1.4转矩计算(ACTR)模型图4 转矩控制模型1.5坐标变换(2s/2r、2r/2s)模型图5 坐标变换模块模型1.6整体模型图6 整体模型2、仿真结果及分析由于学生能力有限,在按照相关文献上的程序编写后,大致模块已经建立出来,但是,在电机建模上不太清楚,不能完整的运行程序,故无法来改变参数来进行完整的仿真,希望老师能够谅解。
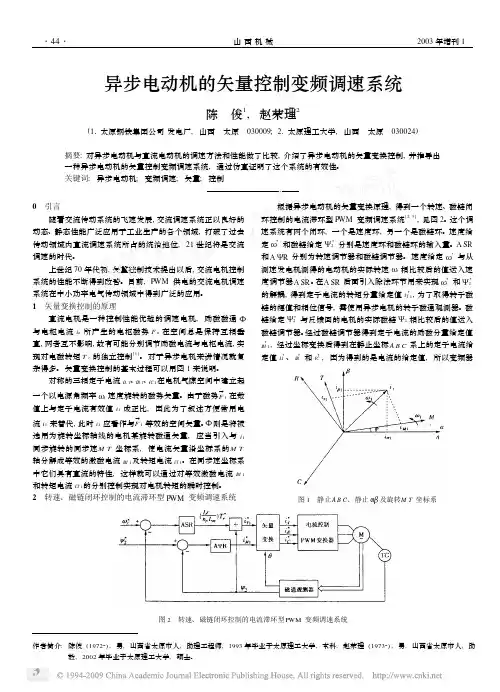
基于Matlab转差频率控制的矢量控制系统的仿真概述:常用的电机变频调速控制方法有电压频率协调控制(即v/F比为常数)、转差频率控制、矢量控制以及直接转矩控制等。
其中,矢量控制是目前交流电动机较先进的一种控制方式。
它又有基于转差频率控制的、无速度传感器和有速度传感器等多种矢量控制方式。
其中基于转差频率控制的矢量控制方式是在进行U /f恒定控制的基础上,通过检测异步电动机的实际速度n,并得到对应的控制频率f,然后根据希望得到的转矩,分别控制定子电流矢量及两个分量间的相位,对输出频率f进行控制的。
采用这种控制方法可以使调速系统消除动态过程中转矩电流的波动,从而在一定程度上改善了系统的静态和动态性能,同时它又具有比其它矢量控制方法简便、结构简单、控制精度高等特点。
Simulink仿真系统是Matlab最重要的组件之一,系统提供了标准的模型库,能够帮助用户在此基础上创建新的模型库,描述、模拟、评价和细化系统,从而达到系统分析的目的。
在此利用Matlab/Simulink软件构建了转差频率矢量控制的异步电机调速系统仿真模型,并对此仿真模型进行了实验分析。
矢量控制是目前交流电动机的先进控制方式,一般将含有矢量交换的交流电动机控制都称为矢量控制,实际上只有建立在等效直流电动机模型上,并按转子磁场准确定向地控制,电动机才能获得最优的动态性能。
转差频率矢量控制系统结构简单且易于实现,控制精度高,具有良好的控制性能、因此,早起的矢量控制通用变频器上采用基于转差频率控制的矢量控制方式。
基于此,本文在Mtalab/Simulink环境下对转差频率矢量控制系统进行了仿真研究。
1转差频率矢量控制系统由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。
转差频率矢量控制是按转子磁链定向的间接矢量控制系统,不需要进行复杂的磁通检测和繁琐的坐标变换,只要在保证转子磁链大小不变的前提下,通过检测定子电流和旋转磁场角速度,通过两相同步旋转坐标系(M-T坐标系)上的数学模型运算就可以实现间接的磁场定向控制。
三相异步电机vf矢量控制
三相异步电机的VF(Voltage-Frequency,电压-频率)控制是一种基本的交流调速技术,它通过改变电源的电压和频率来调节电机的速度。
这种控制方式在恒转矩负载下可以保持电机输出转矩与频率成正比变化,以实现电机速度的平滑调节。
然而,VF控制存在一些局限性,如低频时由于电压降低导致的转矩不足、动态响应较慢以及无法精确控制电机磁通等。
而矢量控制(Vector Control),也称为磁场定向控制(Field Oriented Control, FOC),则是一种更为先进的交流电动机控制方法,尤其是对三相异步电机而言。
矢量控制通过对定子电流进行解耦处理,分别控制励磁电流分量(产生磁场)和转矩电流分量(产生转矩),使得电机能够在宽广的速度范围内获得接近直流电机的性能表现。
在矢量控制中,控制器根据电机模型实时计算出应该施加到电机上的最佳电压矢量,从而精准地控制电机的磁场强度和转矩输出,达到高精度的速度控制和快速的动态响应效果。
相比于VF控制,矢量控制能够有效提高系统的稳定性和动态性能,并能在低频运行时保持较高的输出转矩,适用于对速度控制要求较高的场合。
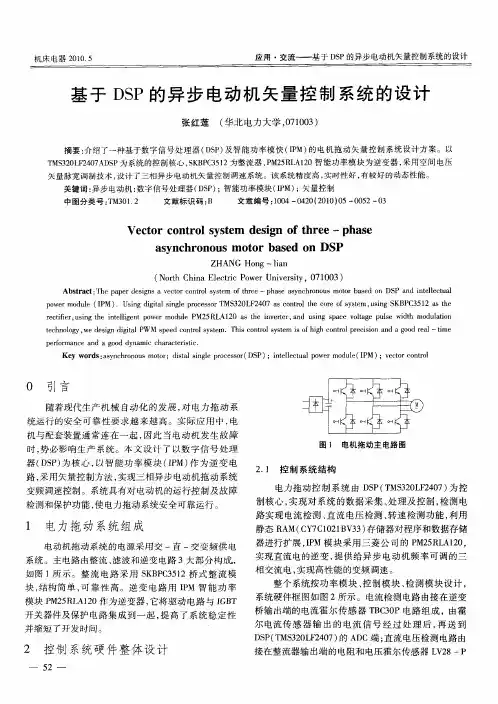
异步电动机矢量控制系统
由于DSP能对输入数据进行高速处理,克服了一般单片机处理能力有限的问题,而且电路设计较为简单,能获得较强的抗干扰能力,另外DSP具有专业化的指令集,提高了数字滤波器的运算速度,使得DSP在控制器的规则实施、矢量控制和矩阵变换等方面具有独特的优势。
在电机控制系统中多用DSP作为核心控制器,以满足对实时性、稳定性及可靠性的要求。
控制器选用TMS320F2812,具有丰富的电机控制外设电路,16个12位A/D转换通道,12个PWM输出通道,能控制两台三相电机,体积小、价格低、可靠性高,能在高度集成的环境中实现高性能电机控制。
基本结构如下:
通过芯片内部自带的ADC转换模块中的3个A/D转换通道捕捉霍尔位置传感器的3个相位置信号,接到ADCINA3、ADCINA4、ADCINA5引脚上,可以检测转子的转动位置。
F2812同时需要3个A/D转换通道对霍尔电流传感器电流进行采集,以获得3个相电流信号。
霍尔电流传感器采集电机相电流的瞬时值,估计电机的实时运行状态,如转矩的大小和方向、电机的转速和滑差。
测量电机转速常用的方法有增量编码器和测速发电机。
本设计采用光电编码器,F2812包含一个正交编码单元,电机的码盘信号通过CAP1和CAP2端口进行捕捉。
捕捉到的数据存放在寄存器中,通过比较捕捉到的两相脉冲值可以确定当前电机转子的速度和方向,完成这些仅需两个数字量输入和一个内部寄存器。
为防止电流过高对DSP造成损坏,信号经过一个光耦合器件连接到DSP引脚。
2.A/D转换模块
F2812内部集成了16路12位A/D转换模块,模拟量的输入范围是0-3.3V,通道分为两组,0-7为一组,8-15为一组,每组具有一个专门的输入端。
事件转换器可将ADC配置成两个独立的8通道模块,也可串接成一个16通道模块。
8通道模块将8路输入信号自动排序,并按序选择一路信号进行转换,完成后的结果保存在对应的结果寄存器中。
串接模式下,成为16通道的A/D转换器模块允许对同一个通道信号进行多次转换,主要用于过采样的算法中。
3.电机驱动器
F2812有16路PWM输出口供电机使用,通过控制PWM波的占空比来改变加在电机两端的电压,从而改变电机的转速。
由于DSP发出的PWM波功率不足以驱动大功率电机,需要经过IGBT进行功率转换。
设计中采用功率芯片如PM100DSA120等,这类芯片利用TTL电平即可实现功率驱动,而且具有完整的隔离及保护功能,如过流、过压保护等。
主要软件设计如下:
1.初始化程序;
CLRC CNF
SETC OVM
SPM 0
SETC SXM
LAR AR0,#DEC_MS
LAR AR1,#(24-1)
LACC #ANGLES_
LARP AR0
INIT_TBL
TBLR *+,AR1
ADD #1
BANZ INIT_TBL,AR0
LAR AR4,#79H
LDP #0E0H
SPLK #68H,WDCR
SPLK #0284H,SCSR1
LDP #0E1H
SPLK #900H,ADCTRL1
SPLK #0001H,MAXCONV
SPLK #0010H,CHSELSEQ1
LACC MCRA
OR #0FD8H
SACL MCRA
2.电流采样和A/D转换子程序
LDP #0E1H
SPLK #2000H,ADCTRL2
BIT ADCTRI2,3
BCND CONVERSION,TC
LACC RESULT0,10
LDP #0
SACH IA
LDP #0E1H
LACC RESULT1,10
LDP #0
SACH IB。