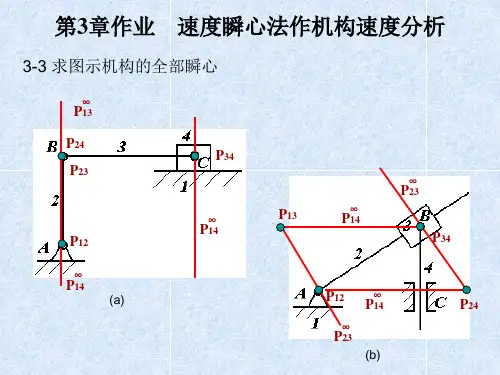
用速度瞬心法作机构的速度分析心法作机构的速度分析
- 格式:pdf
- 大小:474.34 KB
- 文档页数:7

《机械原理》第三章平面机构运动分析——利用瞬心法进行机构速度分析12345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(1)2n n N -=1、瞬心数目:5(51)2⨯-=10=2、瞬心位置:运动副联接:非运动副联接:1223344515P P P P P 、、、、1314242535P P P P P 、、、、P 13P 35P 1412345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(已知P 14在AE 线上)P 14P 13P 35P 13P 35P 141342P 34P 14P 23P 12P 24例2:设已知机构各构件尺寸,原动件2的角速度为ω2,求在图示位置时从动件4的角速度ω4。
分析:已知ω2,则构件2上各点运动已知,4构件为转动构件,如果知道构件上某点的速度大小,可求出其角速度ω4。
而P 24为2、4构件的等速重合点。
解:确定机构瞬心如图所示2142441224P P P P ωω=41424lP P ωμ=2421224P l v P P ωμ=机构的传动比机构的传动比等于该两构件的绝对瞬心至相对瞬心距离的反比。
为尺寸比例尺l μω4ω224P v 请问在此位置3构件的转动中心在哪儿?P 13分析:已知ω2,则构件2上各点运动已知,4构件为平动构件,构件上某点的运动可代替该构件的运动,P 24为2、4构件的等速重合点。
P 23P 24P 12234ω2v 4P 14→∞P 34例3:如图所示的带有一移动副的平面四杆机构中, 已知原动件2以角速度ω2等速度转动, 现需用瞬心法确定机构在图示位置时从动件4的速度v 4。
2421224P lv v P P ωμ==解:确定机构瞬心如图所示式中为尺寸比例尺l μv P 24例4:如图所示凸轮机构,设已知各构件尺寸和凸轮的角速度w 2,求从动件3的速度v 3。
内 容2. 解析法:计算精度高,随着数学软件和计算机辅助设计软件的不断完善和发展,采用解析法解决机构的分析、综合过程中的相关问题越来越普及。
利用计算机求解,相当方便。
例如:杆组法——将机构拆成若干基本杆组,在对机构进行运动分析时调用相应的杆组运动分析的通用子程序,进行计算,非常方便。
3. 实验法:在现有设备上测运动参数,能反映机构在工作环境下的真实运动,但需要设备。
3-2 速度瞬心及其在平面机构速度分析中的应用 一、 速度瞬心1.瞬心的定义、分类:彼此作平面相对运动的两刚体,在任一瞬时,其相对运动都可以看做是绕某一重合点的转动,此重合点称为瞬时速度中心,简称瞬心。
显然,速度瞬心是相对运动的两构件上绝对速度相等(相对速度为零)的瞬时重合点。
若两构件之一是静止的,则该瞬心处的绝对速度为零,称为绝对瞬心;若两构件都是运动的,则其瞬心处的绝对速度不为零,称为相对瞬心。
通常用ijP 或jiP 表示构件i 、j 的速度瞬心。
2. 瞬心的数目由于任意两个构件形成一个瞬心,若机构由N 个构件(含机架)组成,则瞬心的数目为:2)1(2-=N N C N 。
如:四杆机构有6个瞬心。
其中3个绝对瞬心,3个相对瞬心。
3、瞬心的求法A )、直接接触的两构件间的瞬心(如图3-2所示) ● 转动副相连的两构件,转动副的中心为12P ,图a● 移动副联接的两构件,其瞬心在垂直于导路的无穷远处,图b ● 两构件组成高副时,若为纯滚动,则接触点为瞬心,图c ;● 若为滚动兼滑动:瞬心在过接触点的公法线上,具体位置另需条件确定。
图3-4 内 容B )、不直接接触的两构件间的瞬心不直接接触的两构件其瞬心常借助于“三心定理”来确定。
“三心定理”——三个彼此作平面运动的3个构件,共有3个瞬心,它们必位于同一条直线上。
例【3-1】:求铰链四杆机构的瞬心(如图3-4所示) 其中哪些是绝对瞬心,哪些是相对瞬心? 思考:构件3上速度为零的点是哪一点?二、速度瞬心法在机构速度分析上的应用用速度瞬心法对机构进行速度分析的一般方法是:找到已知构件与待求构件的相对瞬心,它是这两个构件上绝对速度大小相等、方向相同的点,建立待求运动构件与已知运动构件的速度关系即可求解。

第二讲平面机构的运动分析一用速度瞬心法作机构的速度分析1 速度瞬心的定义:作平面相对运动两构件上任一瞬时其速度相等的点,称为这个瞬时的速度中心。
分类:相对瞬心-重合点绝对速度不为零绝对瞬心-重合点绝对速度为零2 瞬心数目 K=N(N-1)/23 机构瞬心位置的确定直接观察法:适用于求通过运动副直接相联的两构件瞬心位置。
1)两构件组成转动副时,转动副中心即是它们的瞬心。
2)若两构件组成移动副时,其瞬心位于移动方向的垂直无穷远处。
3)若两构件形成纯滚动的高副时,其高副接触点就是它们的瞬心。
4)若两构件组成滚动兼滑动的高副时,其瞬心应位于过接触点的公法线上。
不直接形成运动副的两构件利用三心定理来确定其具体位置。
三心定理:三个彼此作平面平行运动的构件共有三个瞬心,且它们位于同一条直线上。
此法特别适用于两构件不直接相联的场合。
4传动比的计算ωi /ωj=P1j P ij / P1i P ij两构件的角速度之比等于绝对瞬心至相对瞬心的距离之反比5.角速度方向的确定相对瞬心位于两绝对瞬心的同一侧,两构件转向相同相对瞬心位于两绝对瞬心之间,两构件转向相反。
常见题型:1.速度瞬心的求解、2利用速度瞬心求解速度。
二、用矢量方程图解法作机构的速度和加速度分析 1.同一构件上两点之间速度,加速度的关系。
①由各速度矢量构成的图形称为速度多边形(或速度图);由各加速度矢量构成的图形称为加速度多边形(或加速度图)。
p ,'p 称为极点。
②在速度多边形中,由极点p 向外放射的矢量,代表构件上相应点的绝对速度。
而连接两绝对速度矢端的矢量,则代表构件上相应两点间的相对速度,方向与角标相反,如代表CB v (C 点相对B 点的速度)。
③在加速度多边形中,由极点'p 向外放射的矢量代表构件上相应点的绝对加速度。
而连接两绝对加速度矢量端的矢量代表构件上相应两点间的相对加速度,方向与角标相反。
相对加速度可用其法向加速度和切向加速度来表示。

速度瞬心在机构分析中的应用机构运动分析是在已知机构尺寸和原动件运动规律的前提下,确定机构中其他构件上某些点的轨迹、位移、速度及加速度和某些构件的角位移、角速度及角加速度。
而速度瞬心法对于一些较简单机构的速度求解十分方便。
一.定义所谓速度瞬心是指两个相对运动的构件上瞬时相对速度为零的重合点,简称瞬心。
若该重合点的绝对速度为零则称为绝对速度瞬心,若重合点绝对速度不为零则称为相对速度瞬心。
二.瞬心的确定方法直接以运动副相连的两构件速度瞬心确定方法:若为转动副连接,铰链中心即为速度瞬心;若以移动副相连,速度瞬心在垂直于导路方向的无穷远处;若构成平面高副,速度瞬心必位于接触点的公法线。
此外,做平面运动的三个构件之间的三个速度瞬心必定在同一条直线上。
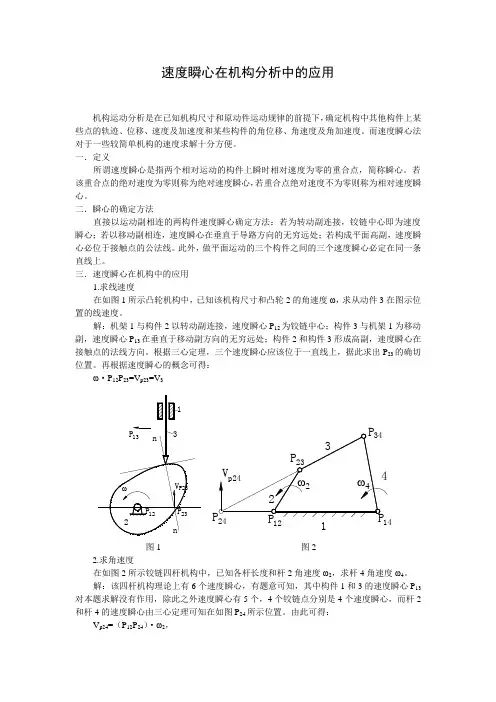
三.速度瞬心在机构中的应用1.求线速度在如图1所示凸轮机构中,已知该机构尺寸和凸轮2的角速度ω,求从动件3在图示位置的线速度。
解:机架1与构件2以转动副连接,速度瞬心P12为铰链中心;构件3与机架1为移动副,速度瞬心P13在垂直于移动副方向的无穷远处;构件2和构件3形成高副,速度瞬心在接触点的法线方向。
根据三心定理,三个速度瞬心应该位于一直线上,据此求出P23的确切位置。
再根据速度瞬心的概念可得:ω·P12P23=V p23=V3121图1 图22.求角速度在如图2所示铰链四杆机构中,已知各杆长度和杆2角速度ω2,求杆4角速度ω4。
解:该四杆机构理论上有6个速度瞬心,有题意可知,其中构件1和3的速度瞬心P13对本题求解没有作用,除此之外速度瞬心有5个,4个铰链点分别是4个速度瞬心,而杆2和杆4的速度瞬心由三心定理可知在如图P24所示位置。
由此可得:V p24=(P12P24)·ω2,V p24=(P24P14)·ω4,ω4=ω2·(P24P14)/(P12P24)3.求高副机构的传动比。
已知高副机构如图3所示,求该机构传动比。
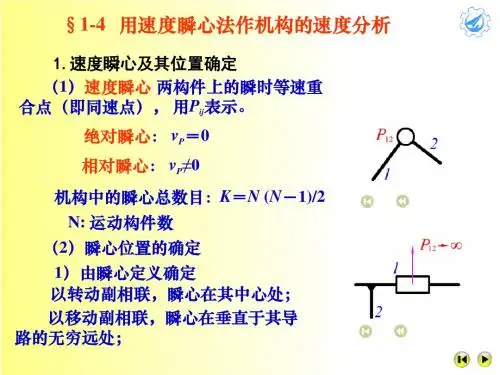
图3.2 三心共线图3.3 铰链四杆机构与速度瞬心3.2 平面机构运动分析的图解法对平面机构作运动分析的方法有速度瞬心法与矢量方程图解法,其中速度瞬心法只能对平面机构作速度分析。
3.2.1速度瞬心法1) 速度瞬心与位置速度瞬心是两个作平面相对运动构件上的同速点,当该点的速度等于零时,称为绝对瞬心;当该点的速度不等于零时,称为相对瞬心。
由于每两个构件形成一个瞬心,对于N 个构件形成的机构,其瞬心的数目S 为)13(2/)1(--= N N S 运动副与速度瞬心的关系如图3.1所示,转动副的几何中心是速度瞬心;移动副的速度瞬心在垂直于运动方向的无限远处;高副的速度瞬心在过接触点所作的公法线上;纯滚动高副的速度瞬心在接触点上。
三个构件形成三个速度瞬心,这三个速度瞬心位于一条直线上,如图3.2所示,该规律称为三心定理。
2) 用速度瞬心法作机构的速度分析在图3.3所示的铰链四杆机构中,主动件1以ω1作匀速转动,求图示位置构件2、摇杆3的角速度ω2、ω3。
利用三心定理确定速度瞬心P 13、P 24,由P 13是构件1、3的同速点得L 34133L 14131μωμω⋅⋅=⋅⋅P P P P式中μL 是长度比例尺(μL =实际尺寸/图上尺寸),由此得构件3的角速度ω3为)23(/3413141313-⋅= P P P P ωω由于P 24是绝对瞬心,构件2在此时绕P 24点作瞬时转动,由P 12是构件1、2的同速点得速度方程与ω2分别为L 24122L 14121μωμω⋅⋅=⋅⋅P P P P)33(/2412141212-⋅= P P P P ωωω2、ω3的方向如图所示。
在图3.4所示的曲柄滑块机构中,利用三心定理确定速度瞬心P 13、P 24,由P 13是构件1、3的同速点得滑块3的速度V 3得(a)(c)(b)1图3.1 运动副与速度瞬心(d))43(L 131413-⋅⋅= μωP P V在图3.5所示的正弦机构中,利用三心定理确定速度瞬心P 13、P 24,由P 13是构件1、3的同速点得滑块3的速度V 3得)53(L 131413-⋅⋅= μωP P V在图3.6所示的凸轮机构中,利用三心定理确定速度瞬心P 12,由P 12是凸轮1与从动件2的同速点得从动件2的速度V 2得)63(L 121312-⋅⋅= μωP P V以上分析表明,利用速度瞬心作机构的速度分析较简单,但有时速度瞬心位于图纸之外,另外,用速度瞬心不能作机构的加速度分析。
《机械原理》第三章平面机构运动分析——利用瞬心法进行机构速度分析12345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(1)2n n N -=1、瞬心数目:5(51)2⨯-=10=2、瞬心位置:运动副联接:非运动副联接:1223344515P P P P P 、、、、1314242535P P P P P 、、、、P 13P 35P 1412345P 23P 12P 15P 45P 34P 15P 12P 23P 34P 45例1:图示五杆机构,标出全部瞬心。
(已知P 14在AE 线上)P 14P 13P 35P 13P 35P 141342P 34P 14P 23P 12P 24例2:设已知机构各构件尺寸,原动件2的角速度为ω2,求在图示位置时从动件4的角速度ω4。
分析:已知ω2,则构件2上各点运动已知,4构件为转动构件,如果知道构件上某点的速度大小,可求出其角速度ω4。
而P 24为2、4构件的等速重合点。
解:确定机构瞬心如图所示2142441224P P P P ωω=41424lP P ωμ=2421224P l v P P ωμ=机构的传动比机构的传动比等于该两构件的绝对瞬心至相对瞬心距离的反比。
为尺寸比例尺l μω4ω224P v 请问在此位置3构件的转动中心在哪儿?P 13分析:已知ω2,则构件2上各点运动已知,4构件为平动构件,构件上某点的运动可代替该构件的运动,P 24为2、4构件的等速重合点。
P 23P 24P 12234ω2v 4P 14→∞P 34例3:如图所示的带有一移动副的平面四杆机构中, 已知原动件2以角速度ω2等速度转动, 现需用瞬心法确定机构在图示位置时从动件4的速度v 4。
2421224P lv v P P ωμ==解:确定机构瞬心如图所示式中为尺寸比例尺l μv P 24例4:如图所示凸轮机构,设已知各构件尺寸和凸轮的角速度w 2,求从动件3的速度v 3。