基于TMS320C6201DSP的实时弱小目标检测系统设计
- 格式:pdf
- 大小:262.14 KB
- 文档页数:4

基于DSPC6201的数字信号处理平台设计与实现的开题报告一、选题背景和意义随着现代通信和信号处理技术的不断发展和推广,数字信号处理(DSP)技术已成为现代通信、电子、计算机和自控等领域研究和应用的热点之一。
DSP芯片作为数字信号处理系统的核心,具有高速运算、可定制化、易于实现、省电等优点,是数字通信和信号处理领域应用最广泛的芯片之一。
因此,针对DSP技术的应用瓶颈和需求,研究和开发DSP芯片平台已成为当前重要的研究方向之一。
本次开题的选题基于DSPC6201的数字信号处理平台设计与实现。
DSPC6201是基于美国德州仪器公司(TI)TMS320 VC33 DSP内核和自主知识产权设计开发的高性能DSP芯片,具有高速运算、高效能和低功耗等特点。
通过对DSPC6201的设计和实现,可以深入了解DSP技术的特点、功能和应用,同时深化对DSP技术的研究和应用。
二、研究内容和方法本研究的主要内容是基于DSPC6201的数字信号处理平台设计与实现。
具体研究内容包括:1. DSPC6201的性能特点、工作原理和系统框架分析。
2. DSPC6201开发环境的搭建和调试,包括开发工具的选择、硬件平台的设计、底层驱动程序的编写等。
3. DSPC6201的应用研究,包括数字信号处理、多媒体处理和通信处理等方面的研究,对主要的应用场景进行深入研究和探讨。
4. DSPC6201与其他DSP芯片进行对比和分析,探索其优势和不足之处,为后续研究提供参考。
研究方法主要包括文献调研、实验验证和比较分析等。
通过查阅相关文献,了解DSP技术的发展现状和应用领域,选择合适的方法和技术路线,设计和实现基于DSPC6201的数字信号处理平台,同时将平台应用于数字信号处理、多媒体处理和通信处理等方面,测试和验证其性能和效果。
三、预期成果和创新点预期研究成果包括:1. 基于DSPC6201的数字信号处理平台设计和实现,实现数字信号处理、多媒体处理和通信处理等方面的应用。

基于DSP的微弱信号检测采集系统设计通常所用的数据采集系统,其采样对象都为大信号,即实用信号幅值大于噪声信号。
但在一些特别的场合,采集的信号很微弱,其幅值惟独几个μV,并且沉没在大量的随机噪声中。
此种状况下,普通的采集系统和测量办法无法检测该信号。
本采集系统硬件针对微弱小信号,优化设计前端调理电路,利用测量有效抑制共模信号(包括直流信号和沟通信号),保证采集数据的精度要求。
针对被背景噪声笼罩的微弱小信号特性,采纳容易的时域信号的取样堆积平均办法,有利于削减算法实现难度。
芯片因其具有哈佛结构、流水线操作、专用的硬件乘法器、特别的DSP 命令、迅速的命令周期等特点,使其适合复杂的数字信号处理算法。
本系统采纳TI公司的TMS320C542作为处理器,通过外部中断读取数据,并实现取样累加平均算法。
1 取样堆积平均理论微弱信号检测(Weak Signal Detection)是讨论从微弱信号中提取实用信息的办法。
通过分析噪声产生的缘由和逻辑,利用被测信号的特点和相干性,检测被背景噪声笼罩的实用信号。
常用的微弱信号检测办法有频域信号的相干检测、时域信号的堆积平均、离散信号的计数技术、并行检测办法。
其中时域信号堆积平均是常用的一种小信号检测办法。
取样是一种频率压缩技术,将一个高重复频率信号通过逐点取样将随时光变幻的模拟量,改变成对时光变幻的离散量的集合,从而可以测量低频信号的幅值、相位或波形。
时域信号的取样堆积办法是在信号周期内将时光分成若干间隔,在这些时光间隔内对信号举行多次测量累加。
时光间隔的大小取决于要求复原信号的精度。
某一点的取样值都是信号和噪声。
若要复原的信号靠近真切信号,重复采样的次数越多越好,取样时光第1页共3页。

基于DSP的时频图像微弱信号识别系统设计1. 引言1.1 背景介绍随着现代技术的不断进步,微弱信号的识别和处理在许多领域中变得越来越重要。
微弱信号通常具有低信噪比和频谱稀疏性等特点,传统的信号处理方法难以有效提取和识别这些信号。
基于数字信号处理(DSP)技术的微弱信号识别系统成为当前研究的热点之一。
基于DSP的时频图像微弱信号识别系统设计成为一种有效的解决方案。
本文将介绍DSP技术在信号处理中的应用,探讨时频图像在微弱信号识别中的重要性,阐述基于DSP的微弱信号识别系统设计原理,并详细讨论系统框架设计和关键技术算法,为后续研究和实践提供参考和指导。
1.2 研究意义微弱信号识别一直是信号处理领域的重要研究方向之一。
微弱信号通常指的是信号强度极低、噪声干扰严重的信号,其识别对于许多领域具有重要意义。
在军事领域,微弱信号可能是隐藏在庞大的噪声中的敌方通讯信号,对其进行有效识别可以帮助实现情报侦测和军事目标锁定。
在医学领域,微弱信号可能是人体内部的生理信号,如心电图、脑电图等,对其进行准确识别可以帮助医生及时发现疾病并进行治疗。
在通信领域,微弱信号可能是远距离通讯中受到衰减的信号,对其进行准确识别可以帮助提高通讯质量和距离。
研究基于DSP的时频图像微弱信号识别系统具有重要的实际意义和广阔的应用前景。
通过设计开发这样的系统,可以有效提高微弱信号的识别准确性和稳定性,满足不同领域对于微弱信号识别的需求,推动相关领域的技术发展和应用创新。
1.3 研究目的研究目的是构建一个基于DSP的时频图像微弱信号识别系统,实现对微弱信号的有效检测和分析。
通过深入研究DSP技术在信号处理中的应用,探讨时频图像在微弱信号识别中的重要性,以及设计基于DSP的微弱信号识别系统的原理和技术。
通过系统框架的设计和关键技术、算法的介绍,实现对微弱信号的高效识别和分析,为微弱信号的探测和监测提供可靠的技术支持。
研究目的还包括总结和展望研究成果的意义,提出系统的改进方向,为微弱信号识别技术的发展和应用提供理论支持和实践指导。

基于DSP的时频图像微弱信号识别系统设计随着数字信号处理(DSP)技术的发展,时频图像微弱信号的识别系统在许多领域中得到了广泛的应用。
无线通信领域中对微弱信号的识别与定位、环境监测领域中对微弱信号的提取与分析等。
本文将针对基于DSP的时频图像微弱信号识别系统进行设计,并对其原理和关键技术进行详细的介绍。
一、系统设计概述基于DSP的时频图像微弱信号识别系统主要由信号采集、预处理、时频分析、特征提取、分类识别等模块组成。
信号采集模块负责从外部环境中采集信号,并将其转换成数字信号。
预处理模块主要用于对采集到的信号进行滤波去噪、增强信号质量等操作。
时频分析模块用于将信号从时域转换到频域,并将时频图像用于表征信号特征。
特征提取模块用于从时频图像中提取出有区分度的特征,并将其作为输入进行分类识别。
分类识别模块则用于识别信号的类型,并给出相应的判断结果。
二、系统关键技术分析1、信号采集技术信号采集技术主要涉及模数转换(A/D)和信号调制等技术。
模数转换技术将模拟信号转化为数字信号,需要考虑采样频率、分辨率等因素。
信号调制技术主要用于对不同类型的信号进行调制,以便于后续处理和分析。
2、预处理技术预处理技术包括信号滤波、降噪、增强等操作。
信号滤波主要用于去除信号中的干扰成分,降低噪声对后续处理的影响。
降噪技术主要包括数字滤波、小波变换等算法。
信号增强技术主要用于增强信号的特征,提高信号的识别率。
3、时频分析技术时频分析技术有多种方法,包括短时傅里叶变换(STFT)、小波变换、Wigner Ville 分布等。
这些方法可以将信号从时域转换到频域,并生成相应的时频图像。
时频图像主要用于表征信号的时频特征,方便后续的特征提取和分类识别。
4、特征提取技术特征提取技术主要用于从时频图像中提取有区分度的特征,通常使用频域特征、时域特征和时频混合特征等。
频域特征包括频谱、功率谱、频谱熵等;时域特征包括均值、方差、偏度、峰度等;时频混合特征包括小波包系数、Wigner Ville谱等。

基于TMS320C6201的实时图像处理系统
孙勇;孙德宝
【期刊名称】《红外技术》
【年(卷),期】2003(25)6
【摘要】针对多目标跟踪中大数据量、高传输率、复杂运算的实际需要,设计了以DSPTMS320C6201为核心处理器,基于EPLD计算机系统模型的实时多目标图像处理系统.该系统可以满足当前的远程监控、电视电话、会议电视、道路交通管理等诸多视频图像处理与传输领域应用的需求.
【总页数】4页(P6-9)
【作者】孙勇;孙德宝
【作者单位】华中科技大学,控制科学与工程系,湖北,武汉,430074;华中科技大学,控制科学与工程系,湖北,武汉,430074
【正文语种】中文
【中图分类】TN216
【相关文献】
1.基于TMS320C6201实时图像处理系统的EMC设计 [J], 陈寿才;陶炎焱
2.基于TMS320C6201的实时图像处理系统 [J], 孙勇;孙德宝
3.基于TMS320C6201的实时图像处理系统 [J], 刘松涛;周晓东;沈同圣
4.基于TMS320C6201与CPLD的实时图像采集/处理研究 [J], 刘德超;张鹏宇
5.基于TMS320C6201 EVM板开发图像处理系统 [J], 朱雷;黄席樾;杨璟;李强
因版权原因,仅展示原文概要,查看原文内容请购买。
基于TMS320C6202 DSP的运动目标跟踪系统
董福洲;武林
【期刊名称】《科技广场》
【年(卷),期】2007(000)005
【摘要】本文描述了一种以TMS320C6202数字信号处理器为核心的高速图像处理板和图像实时采集卡及摄像头构成的实时运动跟踪系统.提出了一种快速图像匹配的相关跟踪算法,给出了在复杂背景下跟踪飞机的实验结果.实验证明该系统性能可靠,跟踪效果较好,并有较高的实时性.
【总页数】2页(P141-142)
【作者】董福洲;武林
【作者单位】南昌大学信息工程学院,南昌,330031;南昌大学理学院,南昌,330031【正文语种】中文
【中图分类】TP391
【相关文献】
1.基于TMS320C6202和FPGA的红外导引头图像处理系统设计 [J], 蔡胜兵;段哲民;许家栋
2.基于DSP的主动视觉运动目标跟踪策略及实现 [J], 王睿;王林;姜志威
3.基于DSP的运动目标跟踪系统 [J], 李位星;范瑞霞
4.基于DSP的运动目标跟踪系统的实现 [J], 周香珍;芮筱亭;张顺
5.一种基于TMS320C6202 DSP的图像处理系统的设计 [J], 孙兴;张远新;鲁剑峰;高虹
因版权原因,仅展示原文概要,查看原文内容请购买。
基于DSP的时频图像微弱信号识别系统设计随着科技的发展和社会的进步,微弱信号识别技术在航空航天、海洋探测、医学检测等领域得到了广泛的应用。
在此背景下,基于DSP的时频图像微弱信号识别系统受到了研究者的关注。
本文将介绍一种基于DSP的时频图像微弱信号识别系统的设计。
一、系统设计思路本系统的设计基于DSP实现,通过对输入信号进行模拟滤波、时频变换等处理,从信号中提取出微弱的目标信号,并对目标信号进行识别。
该系统的设计思路主要包括以下几个方面:1.信号采集本系统采用ADC进行信号采集,采集到的信号经过放大和滤波处理,保证信号的质量和稳定性。
同时,利用DSP提供的被动滤波器器件,对信号进行数字滤波,丢弃高频噪声和不相关的信号。
2.时频变换时频变换是识别微弱信号的关键步骤,本系统采用了小波变换和Wigner-Ville分布两种时频变换方法,以提高信号的时频分辨率和识别能力。
其中,小波变换主要用于反映信号的瞬态特征,Wigner-Ville分布主要用于反映信号的频率特性。
3.微弱信号识别经过时频变换后,本系统识别出微弱信号的方法主要包括两种,基于模板匹配的识别和基于特征提取的识别。
其中,模板匹配是一种简单有效的识别方法,但对模板的质量和数量要求较高,选择合适的模板也是一个技术难点;特征提取则需要从信号中提取一定的特征值,通常利用功率谱密度、相关函数和自回归谱等方法进行提取。
提取出的特征值再通过分类器进行分类,从而实现微弱信号的识别。
二、系统实现方案基于以上系统设计思路,本文设计了一种基于DSP的时频图像微弱信号识别系统,主要包括以下几个模块:在模拟电路中采用低通滤波器使得噪声信号逐渐减小,使已经变得微弱的信号能够单独提取出来,通过ADC采集到信号,将其数字化,方便后续的处理。
选择小波变换是因为其具有较强的时频局部化特性,能够应对信号中的瞬态和非平稳特性。
我们可以利用小波变换将微弱信号进行重构和滤波处理,以便更好地提取出目标信号。
收稿日期:2004-03-07;修回日期:2004-08-18。
作者简介:李正周(1974-),男,博士研究生,主要研究方向为信号处理,目标识别与跟踪以及DSP 应用。
基于TMS320C6201DSP 的实时弱小目标检测系统设计李正周,李维雅,董能力,金 钢(中国科学院光电技术研究所,四川成都610209)摘 要:为解决电视跟踪系统中弱小目标检测算法复杂性和系统实时性之间矛盾,设计了以T MS320C6201数字信号处理器(DSP )为核心处理器、基于现场可编程门阵列(FPG A )和PCI 总线的实时目标检测处理平台。
重点介绍了该平台的基本组成与工作原理。
针对弱小运动目标的特点,采用了一种基于灰值形态学滤波和运动关联的检测方法来检验该平台性能。
实测结果表明该平台满足电视跟踪系统的实时性要求。
关键词:弱小运动目标;数字信号处理器;现场可缩程门阵列;运动关联中图分类号:T N941.1 文献标识码:ADesign of real 2time hardw are system based on TMS320C6201DSPfor detecting a small dim targetLI Zheng 2zhou ,LI Wei 2ya ,DONG Neng 2li ,J I N G ang(Institute o f Optics and Electronics ,Chinese Academy o f Sciences ,Chengdu 610209,China )Abstract :In view of the con flict between alg orithm ’s com plexity and the real 2time property in the T V tracking system ,a platform is designed to detect small dim targets in real time.The platform is based on T MS320C6201digital signal process or (DSP ),field programmable gate arrays (FPG A )and PCI Bus.The basic com ponents and w orking principle are introduced.According to the characters of the small dim m oving target ,a meth od based on m orph ology and m otion ass ociation is applied to the platform to verify its performance.The experimental result indicates that the platform satis fies the real 2time requirement of the T V tracking system.K ey w ords :small dim m oving target ;digital signal process or ;field programmable gate arrays ;m otion ass ociation1 引 言强杂波背景下低信噪比、低对比度空间弱小运动目标的提取、识别是捕获、跟踪和瞄准(ATP )系统的关键技术之一,同时也是制约系统性能提升的难点问题[1]。
强杂波图像通常目标弱小,信噪比低,对比度小,背景起伏。
目前检测该类目标采用的方法多为序列图像轨迹关联[2~4]。
这些算法一般都具有算法复杂、运算量大等特点,需要具有强大运算能力的硬件平台来支撑,以保证系统的实时性。
因此,检测强杂波背景下的弱小运动目标存在算法复杂性与系统实时性之间的矛盾:一方面要求采用复杂的、智能化程度高的检测算法来提高系统的识别能力和跟踪精度;另一方面伺服跟踪系统的响应带宽要求算法具有强实时性。
本文从实时弱小目标检测的要求出发,设计了以T MS320C6201数字信号处理器为核心处理器、基于FPG A 和PCI 总线的硬件处理平台。
在该实时图像处理系统中,图像预处理算法运算量大,对处理速度要求高,但运算结构相对简单,适于用FPG A 硬件实现;目标识别和跟踪算法与目标的特征有关,判断的准则多,算法控制复杂,适于用DSP 软件实现;通过PCI 总线,图像处理板与计算机实时通信。
实测结果表明,该平台满足实时检测、识别和跟踪复杂背景下弱小目标的要求。
2 实时弱小目标检测平台设计该平台在主控计算机的控制下实现图像数据的采集、处理、存储和显示等多种功能。
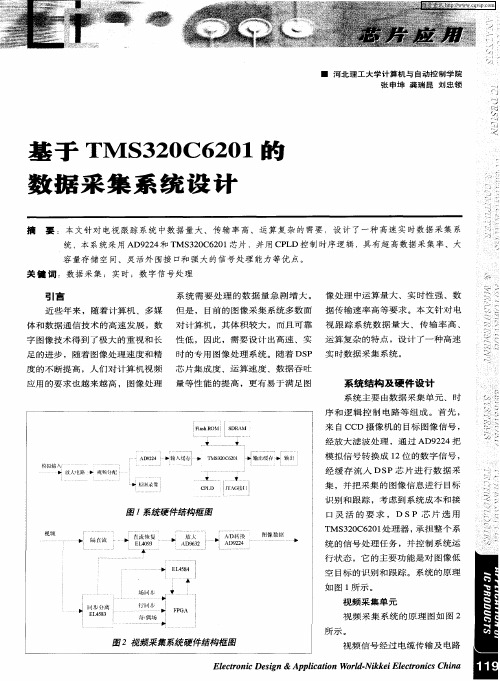
2.1 系统组成该平台由三部分组成:视频信号处理、FPG A +C6201图像处理和PCI 接口。
计算机与DSP 之间采用主/从模式,即计算机为主控设备,DSP 为被控设备;DSP 和FPG A 之间也2005年5月系统工程与电子技术May 2005第27卷 第5期Systems Engineering and Electronics V ol.27 N o.5文章编号:10012506X (2005)0520814204采用主/从模式,由DSP 控制FPG A 完成相应的功能[5]。
因此,该系统可在计算机的控制下协调工作,具有较强的灵活性,其结构框图如图1所示。
图1 系统结构框图2.2 视频信号预处理CCD 输出的视频信号在由同步分离电路分离处理后的行、场同步信号的控制下,经箝位、滤波、去同步头和放大处理后,经过A/D 转换芯片转换成数字信号输出。
FPG A 在行、场同步信号和时钟信号的驱动下,产生存储原始图像数据的地址;数字信号按照该地址写入FPG A 所开辟的存储器中,为图像预处理作好准备。
2.3 FPG A +C6201图像处理实时输入的数字图像信号经过FPG A 图像预处理后,按照FPG A 产生的地址写入大容量的双口RAM ,同时DSP 通过与FPG A 相连的INT 7中断信号触发中断程序以DM A 方式从双口RAM 中将数据写入片外的S DRAM ,以便DSP 完成目标的识别处理;并将目标的脱靶量数据通过HPI 口写入计算机,计算机通过相应的接口将其送给伺服控制系统,驱动系统闭环跟踪。
本设计采用的FPG A 是X ilinx 公司S partan 2X L 系列的XCS20X LT Q144。
该芯片有400个可编程逻辑功能块(C LB ),20000个逻辑门。
若干C LB 通过可编程布线的互连能够完成相应的数学运算;一些C LB 可配置为片内RAM ,用来存放待处理和处理过的数据。
FPG A 在外部时钟信号的驱动下高速、并行地处理图像数据。
设计者可根据系统接口和所需资源的多少选用相应容量的FPG A 。
T MS320C6201DSP 是TI 公司新近推出的定点DSP 芯片,主频为200MH z ,峰值处理速度为每秒1600条指令[6,7]。
该DSP 以下面的三个结构特点为开发弱小目标检测算法提供了物理支持。
(1)外部存储器接口(E MIF )实现了与各种外部高速、大容量存储器件的连接。
检测弱小目标的过程中,通常要保留大量的原始数据和中间数据,高速、大容量的存储器为高速读、写数据提供了物理空间。
(2)主机接口(HPI )实现计算机和DSP 的连接,组成主/从控制模式,便于程序的调试和开发。
(3)较多的硬中断实现与外部接口的突发异步通信,为系统各部分之间的实时通讯提供支撑。
T MS320C6201DSP 既有高速计算能力,又有友好的外部接口,有利于实时图像处理的高速度计算、强实时通讯和大容量数据存储。
在TI 公司的CCS (code com poser studio )集成开发环境中,通过调用其提供的系统函数,便捷地进行系统调试并实现实时处理中的中断调度、DM A 控制等功能。
最终生成的可执行代码可通过J T AG 口或HPI 接口加载到DSP 中,触发DSP 程序运行。
2.4 PCI 接口DSP 与PC 机之间的数据传输和通信利用S5933来实现。
S5933提供与PCI 总线、附加总线(add 2on bus )和非易失存储器三种物理接口。
PC 机和DSP 通过对S5933中寄存器的读、写实现相互间的数据传输和通信。
图2是基于S5933 第27卷 第5期基于T MS320C6201DSP 的实时弱小目标检测系统设计・815 ・ 的PCI 接口框图。
图2 基于S5933的PCI 接口框图本系统中S5933设计成从设备模式,将附加总线映射到C6201的CE3内。
当DSP 完成目标识别后,就向特定的Mailbox Register 中写入标志信号。
PC 机查询到该信号后,就通过PCI 总线从DSP 相应存储区中读出数据,实时显示当前目标的识别、跟踪情况。
3 实时检测算法原理图像中目标的灰度值较周围背景或高或低,与背景存在较大程度的不相关,是图像中较为孤立的区域,因此可表示为(x (i ,j ,k )=s (i ,j ,k )+n (i ,j ,k )目标区b (i ,j ,k )+n (i ,j ,k )背景区(1)式中:i ,j ,k ———图像空间的水平坐标、垂直坐标和帧序,x (i ,j ,k )———第k 帧图像(i ,j )点的灰度值,n (i ,j ,k )、s (i ,j ,k )、b (i ,j ,k )———噪声、目标和背景的灰度值。
灰值形态学提供了一种基于形状分析的信号处理方法,它能够保持图像中重要的形状信息,并滤除相关性差的噪声。
它通过4种基本运算,即灰值腐蚀f .g 、灰值膨胀f ・g 、灰值开O g (f )和灰值闭C g (f )完成图像非线性平滑滤波,其中f 表示图像,g 为形态结构元素。
灰值形态学基本运算的详细定义可参考文献[2]。
采用O g (f )和C g (f )的平均值来表示图像f (x ,y )的平滑部分hyb (f ),即 hyb (f )=(C g (f )+O g (f ))/2(2)滤波后的残差图像r 表示为 r =f -hyb (f )(3)残差图像是包含目标在内的图像高频部分,它通常服从正态分布。
采用恒虚警率准则自适应地获取门限对其分割,得到包括目标和噪声的候选目标。
目标遵循着一定的运动规律,其运动轨迹具有一定的连续性和关联性;相反,噪声是随机波动起伏的,没有特定的运动规律。
目标的运动规律决定了其在后续的图像上只能出现在附近区域,并且灰度在短时间内保持连续。
设目标灰度在相邻帧的变化为d (i ,j ,k ),则d (i ,j ,k )=min [c 3(f (i +di ,j +dj ,k )-f (i ,j ,k -1))], di ,dj ∈σ(4)式中:c ———常数,(i ,j )———像素的坐标,k ———序列图像的帧序,σ———几个像素大小的区域。