轨检系统介绍
- 格式:docx
- 大小:1.74 MB
- 文档页数:5
《轨检仪轨距智能检测系统设计》篇一一、引言随着轨道交通的快速发展,轨距检测作为保障列车运行安全的重要环节,其准确性和效率性显得尤为重要。
传统的轨距检测方法主要依赖于人工测量,不仅效率低下,而且易受人为因素影响,难以满足现代轨道交通的高效、精准需求。
因此,设计一款轨检仪轨距智能检测系统,实现自动化、智能化的轨距检测,成为当前研究的热点。
本文将详细介绍轨检仪轨距智能检测系统的设计思路、方法及实现过程。
二、系统设计目标轨检仪轨距智能检测系统的设计目标主要包括以下几个方面:1. 提高检测效率:实现自动化、智能化的轨距检测,提高检测效率,减少人工干预。
2. 保证检测精度:采用高精度传感器和先进的算法,确保检测结果的准确性。
3. 易于操作和维护:系统操作简便,维护成本低,适用于各种轨道环境。
4. 实时数据传输与处理:实现数据的实时传输和处理,为列车调度和运营管理提供支持。
三、系统设计原理轨检仪轨距智能检测系统主要基于传感器技术、图像处理技术和人工智能算法等先进技术,实现对轨道的自动检测。
系统通过高精度传感器采集轨道数据,利用图像处理技术对采集的数据进行处理和分析,再通过人工智能算法对轨道状态进行判断和预测。
四、系统组成及功能轨检仪轨距智能检测系统主要由以下几个部分组成:1. 数据采集模块:负责采集轨道数据,包括轨道几何尺寸、表面状态等。
2. 数据处理模块:对采集的数据进行预处理、特征提取和模式识别等操作,为后续的判断和预测提供支持。
3. 智能判断模块:利用人工智能算法对轨道状态进行判断和预测,包括轨距、水平、高低等参数的判断。
4. 通信模块:实现系统与上位机的数据传输,为列车调度和运营管理提供支持。
5. 显示与控制模块:将检测结果以图像或数据的形式展示给操作人员,同时实现对系统的控制和管理。
五、系统实现轨检仪轨距智能检测系统的实现过程主要包括以下几个方面:1. 传感器选型与标定:选择合适的高精度传感器,并进行标定,确保采集数据的准确性。
GJY-T-4轨道检查仪数据采集分析系统使用说明书成都四方瑞邦测控科技有限责任公司ChengDu SiFang Railway-helper Observe And Control Science Co.,LtdCopyright ? 成都四方瑞邦测控科技有限责任公司中南大学交通装备研究所成都四方瑞邦测控科技有限责任公司 Tel (Fax): 86-28-87075088ChengDu SiFang Railway-helper Observe And Control Science Co.,Ltd 概述 ..................................................................... ........................................................................ .................... 2 使用注意事项 ..................................................................... ........................................................................ ..... 2 仪器连接说明 ..................................................................... ........................................................................ ..... 2 程序主菜单界面 ..................................................................... .........................................................................3 系统服务界面 ..................................................................... ............................................................................. 3 状态监测界面 ..................................................................... ........................................................................ ..... 4 记录资料界面 ..................................................................... ........................................................................ ..... 4 系统设置界面 ..................................................................... ........................................................................ ..... 6 传感器标定选择界面 ..................................................................... .................................................................. 6 传感器零点标定界面 ..................................................................... .................................................................. 7 资料设置 ..................................................................... ........................................................................ ............. 8 日期、时间设定界面 ..................................................................... .................................................................. 9 设置标准界面 ..................................................................... ........................................................................... 10 格式化存储器界面 ..................................................................... .. (10)系统设置查看界面 ..................................................................... .. (11)轨道检查参数输入界面 ..................................................................... ............................................................ 11 轨道检查界面 ..................................................................... ........................................................................ ... 12 电源电压低提示界面 ..................................................................... ................................................................ 16 关闭系统界面 ..................................................................... ........................................................................ ... 17 电源充电 ..................................................................... ........................................................................ .. (17)1成都四方瑞邦测控科技有限责任公司 Tel (Fax): 86-28-87075088ChengDu SiFang Railway-helper Observe And Control Science Co.,Ltd 本系统包含机械和电气两部分,这里介绍的是电气部分的使用。
广州地铁轨道检测车轨检系统采购包安装项目招标文件广州市地下铁道总公司2008年11月总目录第一部分投标邀请第二部分投标人须知第三部分合同书第四部分用户需求书第五部分投标文件格式第六部分评标办法第一部分投标邀请投标邀请招标编号:项目名称:广州地铁轨道检测车轨检系统采购包安装项目日期:2008年11月1.广州地铁轨道检测车轨检系统采购包安装项目的实施地点在广州市,预计项目完成时间为20--年--月--日。
现邀请合格投标人就广州地铁轨道检测车轨检系统设备及有关服务提交密封投标。
详细内容请参阅招标文件。
2.本招标文件由业主发售。
通过资格预审的有兴趣的投标人可从 20--年--月--日8:00至18:00 (北京时间,下同)到以下地址购买招标文件,本招标文件每套售价为200.00元人民币,售后不退。
广州建设工程交易中心广州市天润路333号标前答疑会:购买了招标文件的投标人请于_____年____月____日____时前将需澄清的问题书面传真至________________(“招标人”),业主将在____年____月____日_____时举行标前答疑会并予以澄清答复。
3.所有投标书必须附有一份金额为人民币5万元的投标保证金。
投标保证金的有关事项按投标人须知的相关规定执行。
收取投标保证金地点:详见须知中有关条款。
4.投标书必须在20--年--月--日9:00-10:00时交到在广州建设工程交易中心的下列地点,业主将于年月日上午10:00在同一地点公开进行第一次开标:广州建设工程交易中心—-室广州市天润路333号第二次开标的具体日期、时间和地点将另行通知。
第一次开标时,请投标人的法定代表人或其授权代表(若非签署投标文件的授权代表,须另出具法定代表人授权书)出席开标会,同时出示本人身份证并签名报到,否则其投标将被拒绝。
第二次开标时,若投标人不出席开标会,则视同对开标过程及结果无异议。
5. 业主将不负责投标人准备标书和递交标书所发生的任何成本和费用。

城市轨道交通自动售检票系统体系概述摘要:城市轨道交通自动售检票系统由清分中心(ACC)、线路中心计算机系统(LCC)、车站计算机系统(SC)、车站终端设备(SLE)、车票五个层次构成,五层架构的自动售检票系统非常适用于城市轨道交通线网运营管理的需要,是目前国内外各城市的主要设计方案。
本文介绍了清分中心、线路中心计算机系统、车站计算机系统的主要功能及构成,并就车站终端设备、车票进行了组成及说明,为城市轨道交通自动售检票系统的设计提供参考。
关键词:自动售检票系统;清分中心;线路中心计算机系统;车站计算机系统;车站终端设备;车票自动售检票系统(AutomaticFareCollectionSystem,简称AFC系统)是基于计算机、通信、网络、自动控制等技术,实现轨道交通售票、检票、计费、收费、统计、清分、管理等全过程的自动化系统,是城轨系统中的运营核心子系统,该系统综合了机械、电子、通信、计算机等学科,替代传统的人工售检票,实现了地铁运营环境中售票、进站检票、出站检票、票务数据统计和处理等环节的自动化,杜绝了人为因素的影响,体现了地铁票务管理的现代化水平,同时也极大地方便了乘客。
目前国内外城市轨道交通已建和在建线路的AFC系统都是按照系统结构简单、扩充灵活、经济合理、管理方便的原则设计,基于此原则构建的五层架构AFC系统已经是目前国内外各城市的主要设计方案,并大量开花结果,如广州、上海等城市地铁中的广泛应用。
AFC的层次结构是按照全封闭的运行方式,以计程收费模式为基础,采用非接触式IC 卡为车票介质的组成原则,根据各层次设备和子系统各自的功能、管理职能和所处的位置进行划分的。
五层架构AFC系统总体结构如图1所示,它们分别是:第一层:轨道交通清分中心;第二层:线路中心计算机系统;第三层:车站计算机系统;第四层:车站终端设备;第五层:车票。
图1AFC系统总体架构图1轨道交通清分中心(ACC)ACC为各线路统一制定、发行和管理轨道交通专用车票,实现互联互通,并实现与城市公共交通一卡通系统在地铁各线路中的应用(即一票通和一卡通),负责对各联网线路一票通收益作清算、对账、系统安全管理及有关数据处理等和各联网线路与IC卡公司之间的一卡通清算、对帐等业务。
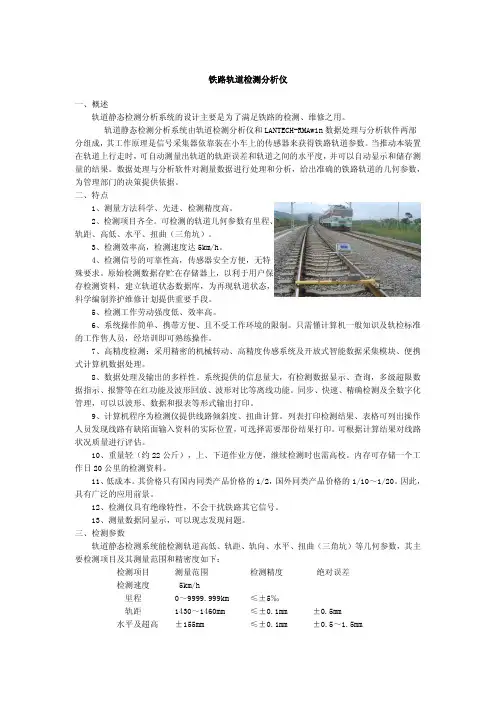
铁路轨道检测分析仪一、概述轨道静态检测分析系统的设计主要是为了满足铁路的检测、维修之用。
轨道静态检测分析系统由轨道检测分析仪和LANTECH-RMAwin数据处理与分析软件两部分组成,其工作原理是信号采集器依靠装在小车上的传感器来获得铁路轨道参数。
当推动本装置在轨道上行走时,可自动测量出轨道的轨距误差和轨道之间的水平度,并可以自动显示和储存测量的结果。
数据处理与分析软件对测量数据进行处理和分析,给出准确的铁路轨道的几何参数,为管理部门的决策提供依据。
二、特点1、测量方法科学、先进、检测精度高。
2、检测项目齐全。
可检测的轨道几何参数有里程、轨距、高低、水平、扭曲(三角坑)。
3、检测效率高,检测速度达5km/h。
4、检测信号的可靠性高,传感器安全方便,无特殊要求。
原始检测数据存贮在存储器上,以利于用户保存检测资料,建立轨道状态数据库,为再现轨道状态,科学编制养护维修计划提供重要手段。
5、检测工作劳动强度低、效率高。
6、系统操作简单、携带方便、且不受工作环境的限制。
只需懂计算机一般知识及轨检标准的工作售人员,经培训即可熟练操作。
7、高精度检测:采用精密的机械转动、高精度传感系统及开放式智能数据采集模块、便携式计算机数据处理。
8、数据处理及输出的多样性。
系统提供的信息量大,有检测数据显示、查询,多级超限数据指示、报警等在红功能及波形回放、波形对比等离线功能。
同步、快速、精确检测及全数字化管理,可以以波形、数据和报表等形式输出打印。
9、计算机程序为检测仪提供线路倾斜度、扭曲计算。
列表打印检测结果、表格可列出操作人员发现线路有缺陷面输入资料的实际位置,可选择需要部份结果打印。
可根据计算结果对线路状况质量进行评估。
10、重量轻(约22公斤),上、下道作业方便,继续检测时也需高校。
内存可存储一个工作日20公里的检测资料。
11、低成本。
其价格只有国内同类产品价格的1/2,国外同类产品价格的1/10~1/20。
因此,具有广泛的应用前景。
地铁AFC系统方案简介地铁AFC系统方案简介地铁AFC系统方案简介1概述随着城市人口的不断增加,发展快速轨道交通是世界上很多国家一致的共识。
地铁/轻轨以其安全、舒适、方便、快捷等突出优点成为大城市改善交通结构、构筑立体交通运输网络、解决交通拥挤难题、改善城市环境的最佳方案。
利用先进的地铁AFC系统来减少地铁工作人员的劳动强度,获取城市交通客流信息与地铁/轻轨系统运营效益的第一手资料,保证投资者的回报等成为系统运营商和投资商关注的焦点。
地铁AFC系统是基于计算机技术、网络技术、现代通讯技术、自动控制技术、非接触IC卡技术、大型数据库技术、机电一体化技术、模式识别技术、传感技术、精密机械技术等多项高新技术于一体的大型系统。
该系统可实现:1、购票、检票、计费、收费、统计的全过程自动化,将大量减少票务管理人员、提高地铁系统的运行效率和效益、使乘车收费更趋合理、减少逃票情况的发生。
2、减少现金流通、堵塞人工售/检票过程中的各种漏洞和弊端、避免售票”找零”的繁琐、方便乘客。
3、通过对客流量、营业额收入等综合业务信息的汇总分析,可以增强客流分析预测的能力、合理地调配车辆,提高了运营公司的经营管理水平。
2方案介绍地铁AFC系统采用全封闭的运行方式,以及计程、计时的收费模式。
以非接触式IC卡为车票介质,通过高度安全、可靠、保密性能良好的自动售检票计算机网络系统,完成地铁/轻轨运营中的售票、检票、计费、收费、统计等票务运营的全过程、多任务自动化管理。
系统设计采用分布式处理结构。
2.1系统组成 AFC系统主要由中央计算机系统、站点计算机系统、终端设备和车票四部分组成。
终端设备包括出/入站检票闸机、自动售票机、车站票务系统、自动充值机、自动验票机等现场设备。
车票有单程票、储值票、特殊票、月票等,可以根据不同的应用需求增加车票类型。
系统结构图如下图所示:2.2系统功能中央计算机系统中央计算机系统的主要功能是对地铁AFC及在相关交通系统内部乘坐联运相关的乘价进行快速和高效的结算。
GJ—6型轨检系统在南京地铁中的应用结合中国铁道科学研究院研发的GJ-6 型轨检系统在南京地铁多年的使用经验,从检测原理、數据运用等方面分析,提出充分利用波形图精确定位超限病害,治理道岔、曲线、碎石地段病害的方法。
同时,对该系统在应用中存在的不足提出了改进意见。
标签:地铁;GJ-6 型轨检系统;病害定位;病害整治;应用0 前言南京作为国内第 6 个开通地铁的城市,从2005 年 1 号线22 km 单线运营到2017 年底356 km的9线线网运营,经历了一个地铁快速发展期。
随着地铁线网密度的增加,对地铁设备的养护要求也在逐渐提升。
南京地铁在轨道设备养护过程中,采用计划修与状态修相结合的形式,其中,动态轨检车的运用在状态修中发挥着不可替代的作用。
自2007 年第一台动态轨检车投入使用,轨检系统从GJ-4 到GJ-6 型均由中国铁道科学研究院研制。
GJ-6 型轨检系统的应用可实现对现场病害的准确判断,避免了正线设备维护中由于环境条件限制、作业人员能力等因素引起的无效作业和有害作业。
1 GJ-6 型轨检系统概况GJ-6 型轨道检测系统主要由激光摄像组件、惯性测量组件、信号处理组件、数据处理组件、里程定位组件 5 部分组成。
南京地铁利用GJ-6 型轨检车对各线路每月进行1 次检测,速度等级采用120~160 km/h 级别,检测项目包括左、右轨向,左、右高低,轨距,水平,三角坑等。
安装有GJ-6 型轨检系统的轨检车如图1 所示。
2 轨检系统的应用2.1 超限病害的精确定位2.1.1 利用道岔精确定位超限病害通常进行动态轨检时,正线道岔开行直股,通过判断波形图中道岔直尖轨、直基本轨、尖轨尖、导曲、岔心等各部位位置(图2),利用道岔尖轨尖或岔心处检测里程与实际里程的差值,可修正超限病害的检测里程。
同时,利用波形图中道岔各部位(转辙部分、连接部分、辙叉部分)可确定超限病害在道岔中的相对位置。
2.1.2 利用曲线精确定位超限病害利用直缓点或缓直点处检测里程与实际里程的差值,可修正超限病害的检测里程。

轨检车的检测原理轨检车的检测原理:1、轨距的检测原理:GJ-4型轨检车所采用的轨距检测系统为激光光电伺服跟踪轨距测量装置。
在测量梁上安装激光光电传感器、位移计、驱动马达及伺服机械。
当钢轨产生位移,使轨距变化时,光电传感器感受其变化并输出相关电信号。
经调制解调器处理后,成为与轨距变化成线形比例的电压信号,再经过信号处理器、功放、驱动马达使光电传感器在伺服的推动下,发出的光束投身到左右股钢轨顶面下16mm处(16mm处是有效位置),跟踪钢轨位移。
经计算显示轨距。
(光电头被堵住、就不能检测轨距、同时也不检测方向)。
监测范围1415mm---1480mm +45mm、–20mm,误差为±1mm。
2.曲率的检测原理:曲率为一定弦长曲线轨道(如30米)对应的圆心角a,即、度/30m、度数大、曲率大、半径小。
反之,度数小、曲率小、半径大。
轨检车通过曲线时、测量轨检车每通过30米后车体方向角的变化值,计算出轨检车通过30米后的相应圆心角的变化值。
即曲率。
曲率、曲率变化率是检测曲线圆度的波形通道、仅供参考、不作考核内容。
能正确判断曲线正矢连续差和曲线的圆度。
曲率变化率的波形通道有突变、正矢肯定不好,(50×曲率)=正矢、如:某曲线曲率为0.46、正矢=50×0.46=23mm。
在直线上存在碎弯、小方向或轨距递减不好。
3、水平的检测原理:水平为轨道同一横断面内钢轨顶面之高差。
曲线水平称为超高。
GJ-4型轨检车采用补偿加速度系统测量水平,利用补偿加速度系统测量车体对地垂线滚动角,利用位移计测量车体与轨道相对滚动角,二者结合计算出轨道倾角。
利用两轨道中心线间距(1500mm)计算出水平值。
监测范围±200mm,误差±1.5mm。
4、高低的检测原理:高低是指钢轨顶面纵向起伏变化。
GJ-4型轨检车采用惯性基准的原理测量轨道变化的实际波型,得到高低变化的空间曲线,数据采集处理系统实时采集数据的间隔距离为0.305m,同时可换算成5米、10米、20米或其它弦长之测量法测量。
现代“巡道工”——工务轨道综合巡检系统对现场轨道设备状态的检查一直是工务重点工作之一,安排有管理人员的定期检查、周一(四)手检和巡道工巡查等。
随着科学技术的进步和高速铁路的发展,对轨道巡查有了更高的要求和条件,铁科院根据总公司的安排研发了工务轨道综合巡检系统,作为高效智能检查手段之一。
现就该新设备检查方式和发现的有关问题介绍如下。
以便大家认识、重视该设备。
系统介绍
工务轨道综合巡检系统主要由视觉子系统、图像采集存储子系统和图像处理子系统组成。
图像存储方式(存储图像的大文件设计)是图像采集系统和图像处理系统相互联系的关键环节;图像识别算法是图像处理子系统的技术核心。
发现的缺陷
钢轨状态。
从图像上可以看出钢轨轨面擦伤、掉块、鱼鳞伤和轨面光带位置情况等轨面状态;还可以从外观区分厂焊(接触焊)、现场气压焊和铝热焊,为疑是伤损区分是否是焊筋波提供帮助;为探伤提供现场钢轨加固与否,是鼓包夹板还是无孔夹具等信息。
贵广客专路材路料
道岔螺栓缺失。
发现合金钢组合岔心连接螺杆脱落。
轨枕失效。
在回放时发现砼轨枕折断,劈裂。
道床缺砟、脏污。
从图像中可以看出轨枕外露情况,判断缺砟情况;还可以明显看出道床板结、脏污情况,为大修清筛提供参考资料。
[此文档可自行编辑修改,如有侵权请告知删除,感谢您的支持,我们会努力把内容做得更好]。
一、对轨检车检测性能应了解的内容:用轨检车对轨道进行动态检测,掌握线路在列车实际动载作用下、轨道几何尺寸偏差(四大项、是了解掌握线路局部不平顺、是峰值管理的考核内容)与相关的各项参数(曲线要素、区段总结报告、公里总结报告)及相应的轨道质量指数(各种偏差的加权平均值、TQI是了解掌握线路区段整体不平顺、是均值管理的考核内容)。
每250mm可测7项的加权平均值。
维规规定每200米质量指数大于15g,要按排维修。
对线路状态作出评价。
是线路动态质量检查的重要手段。
以便科学地指导线路养护维修工作。
即是工务管理科学化的一个重要组成部分。
也是上级领导衡量、考核设备状态的重要措施之一(应该说轨检车是为我们检查线路、发现问题、指导我们维修保养的工具,现已成为考核的工具、又提倡检后修。
这就需要我们努力、对我们的日常工作提出了更高的要求。
不过上级领导考核线路质量凭轨检车是比较科学的)。
并用于各级管理部门之间决策的依据。
要消灭轨检车三级分,就要了解掌握它的检测原理。
但是轨检车成绩好能代表线路基础好吗?也不完全说明线路质量好。
要认真对待。
如;-----。
我国利用轨道检查车检测动态已有40佘年的历史,经过更新、改造、引进技术、目前路局应用的是GJ-4型轨检车车号997990。
车底是160km/h(997740、997519是3型轨检车、车底是120km/h、997519、04年3季度已报废)(今天主要讲997990,因它出分多,优良率低,三级分时有发生)。
自1996年投入使用,(04年5—9月份在南京对车辆进行了大修,其它设备要逐步更换)。
它采用了当今世界上最先进的惯性基准检测原理,被设计成捷联式检测系统。
(现部轨检车已定GJ--5型)监测原理和GJ-4型一样,也是采用惯性基准的检测原理。
不一样的是它采用摄像形式,能看到就能监测到,包括钢轨飞边、垂直、侧面磨耗,还能测出脱轨糸数。
(公式:Q/P≤1.2。
Q表示横向力、P表示垂直力。
安全评估李 谷,祖宏林,张志超(中国铁道科学研究院集团公司机车车辆研究所,北京 100081)摘 要:城市轨道交通检测车的研制很好地适应了我国城市轨道交通快速发展对轨道线路基础设施状态检测的需求。
文章详细介绍了为城轨检测车最新研发的具有自主知识产权的轮轨力检测系统。
阐述了轮轨力检测系统的核心技术,介绍了该检测系统的构成、基本原理、评价方法等几个基本要素;论述了轮轨力检测系统在城市轨道交通线路检查中的作用,分析了轮轨相互作用对于列车安全平稳运行和线路疲劳损伤的影响。
采用轮轨力检测系统对城轨线路质量进行状态检查是具有创新意义的新技术应用,具有独特的技术优势,更适用于轨道线路短波不平顺的检测和识别,有利于保障城轨交通运输安全性,提高运营经济性。
关键词:城市轨道交通;轮轨力检测系统;测力轮对;连续测量;轨道病害中图分类号:U 298城市轨道交通列车轮轨力检测系统作者简介:李谷(1961—),男,研究员0 引言随着我国城市轨道交通行业的迅猛发展,路网规模已经由初期个别超大城市拥有零星地铁线路,快速发展到目前已经有40多个大中型城市拥有超过200条城轨线路,总计长度已经超过5 500 km 。
在这些已经建成或正在建设的城轨线路中,除少数线路采用了单轨、磁悬浮等新类型外,绝大部分仍采用的是传统轮轨运输方式。
城市轨道交通线路的最高运营速度达到甚至超过了160 km/h 。
面对如此庞大的城市轨道交通运营网络,如何更好地保障列车运行安全性和平稳性,提高线路养护的经济性,是城市轨道交通领域面临的一个关键问题。
为了在确保城市轨道交通列车安全运行的基础上进一步综合评价轨道线路的质量,在充分借鉴现有干线铁路和高速铁路综合检测技术的基础上[1-3],研发了具有多专业综合检测能力的城市轨道交通基础设施检测列车,其中轮轨力检测系统对于保障城市轨道交通列车运行安全、提高线路养护维修精准性和经济性能够发挥重要作用(图1)。
本文从轮轨作用机理、检测系统构成、基本原理、评价方法等若干方面对该检测系统进行了详细介绍[4-6]。
1轨道几何状态检测系统
轨道几何状态检测系统采用惯性基准和激光断面摄像原理进行轨道几何参数测量,并实时进行数据分析处理和报告输出,指导线路养护维修。
1.1功能目标
轨道检测系统具有如下检测功能:检测基本轨道几何形位、检测车体加速度响应。
基本轨道几何项目指:轨距、高低、轨向、水平(超高)、三角坑、曲率。
利用以轨道为中线顺时针旋转形成的坐标系统来描述轨道几何项目(参见图2-1)。
—X轴:在轨道上沿列车运行方向的轴;
—Y轴:平行于走行面的轴;
—Z轴:垂直于走行面并指向下的轴。
注:1运行方向;2走行面;3轨道坐标系统
图1 轨道坐标系统各轴的关系
基本轨道几何项目完整地描述了轨道横向、纵向的平顺程度以及两根钢轨相对位置的平顺程度,是轨道检测系统的必检项目。
获取基本轨道几何项目数据后,将按照动态检测标准(或用户要求的检测标准)对几何不平顺进行超限评判,评判项目包括轨距、高低、轨向、水平、三角坑、车体横加、车体垂加。
1.2检测系统技术架构
检测系统的主要传感器都安装在特殊设计的检测梁上。
检测系统主要由激光摄像组件、惯性测量组件、信号处理组件、数据处理组件几个部分组成。
采用惯性基准原理、无接触测量方式,采样间隔为250mm ,采集数据的每一次采样以米为单位标记里程。
图2 检测系统结构示意图
1.3轨道几何波形分析
数据应用计算机可以运行超限数据浏览和波形超限浏览、波形打印、超限打印等应用程序。
波形浏览如图3-14。
激光摄像组件图像处理计算机网络交换机
数据编辑惯性组件
报表打印数据处理计算机
图3 轨道几何状态波形浏览图
2、轨道状态巡检系统
采用视觉测量方法,应用模式识别技术,实现高速条件下钢轨扣件状态动态检测,并具备缺陷自动判别、分类和报表打印等功能。
软件界面
扣件缺失。