最大流算法
- 格式:ppt
- 大小:473.00 KB
- 文档页数:39
传说中效率最⾼的最⼤流算法(Dinic)呵呵,⼜从DK那偷代码了,好兴奋哈,以下是这个算法的简单介绍,不过我⽤它去解决HDU的1532 竟然TLE,郁闷.到时候再继续问问DK吧...so 烦躁.哈哈终于经过⼤⽜的指点原来本算法是从0开始标号的......Dinic是个很神奇的⽹络流算法。
它是⼀个基于“层次图”的时间效率优先的最⼤流算法。
层次图是什么东西呢?层次,其实就是从源点⾛到那个点的最短路径长度。
于是乎,我们得到⼀个定理:从源点开始,在层次图中沿着边不管怎么⾛,经过的路径⼀定是终点在剩余图中的最短路。
(摘⾃WC2007王欣上论⽂)注意,这⾥是要按照层次⾛。
那么,MPLA(最短路径增值)的⼀⼤堆复杂的证明我就略掉了,有兴趣的请⾃⾏参阅WC2007王欣上神⽜的论⽂。
⾸先我们得知道,Dinic的基本算法步骤是,先算出剩余图,然后⽤剩余图算层次图,然后在层次图⾥找增⼴路。
不知道你想到没有,这个层次图找增⼴路的⽅法,恰恰就是Ford-Fulkerson类算法的时间耗费最⼤的地⽅,就是找⼀个最短的增⼴路。
所以呢,层次图就相当于是⼀个已经预处理好的增⼴路标志图。
如何实现Dinic呢?⾸先我们必然要判⼀下有没有能到达终点的路径(判存在增⼴路与否),在这个过程中我们顺便就把层次图给算出来了(当然不⽤算完),然后就沿着层次图⼀层⼀层地找增⼴路;找到⼀条就进⾏增⼴(注意在沿着层次图找增⼴路的时候使⽤栈的结构,把路径压进栈);增⼴完了继续找,找不到退栈,然后继续找有没有与这个结点相连的下⼀层结点,直到栈空。
如果⽤递归实现,这个东西就很好办了,不过我下⾯提供的程序是⽤了模拟栈,当然这样就不存在结点数过多爆栈的问题了……不过写起来也⿇烦了⼀些,对于“继续找”这个过程我专门开了⼀个数组存当前搜索的指针。
上⾯拉拉杂杂说了⼀⼤堆,实际上在我的理解中,层次图就是⼀个流从⾼往低⾛的过程(这玩意⼉有点像预流推进的标号法……我觉得),在⼀条从⾼往低的路径中,⾃然有些地⽅会有分叉;这就是Dinic模拟栈中退栈的精华。
最大流常见算法最大流问题是图论中的一个重要问题,其求解方法有多种,本文将介绍最常见的几种算法。
一、最大流问题简介最大流问题是在一个网络中寻找从源点到汇点的最大流量的问题。
网络是由一些节点和连接这些节点的边构成的,每条边都有一个容量,表示该边所能承载的最大流量。
源点是流量的起点,汇点是流量的终点。
在网络中,还可能存在其他节点和边。
二、Ford-Fulkerson算法Ford-Fulkerson算法是最早用于解决最大流问题的算法之一。
该算法基于增广路径来不断增加流量,直到无法再找到增广路径为止。
1. 算法步骤(1)初始化:将所有边上的流量设为0。
(2)寻找增广路径:从源点开始进行深度优先或广度优先搜索,在搜索过程中只选择剩余容量不为0且没有被标记过的边,并记录路径上容量最小值min。
(3)更新路径上各个边上的流量:将路径上各个边上的流量加上min。
(4)返回第二步,直到无法找到增广路径为止。
2. 算法分析Ford-Fulkerson算法可以保证在有限步内求解出最大流,但是其时间复杂度与增广路径的选择有关,最坏情况下可能需要指数级的时间复杂度。
三、Edmonds-Karp算法Edmonds-Karp算法是基于Ford-Fulkerson算法的一种改进算法。
该算法使用BFS来寻找增广路径,可以保证在多项式时间内求解出最大流。
1. 算法步骤(1)初始化:将所有边上的流量设为0。
(2)寻找增广路径:从源点开始进行BFS,在搜索过程中只选择剩余容量不为0且没有被标记过的边,并记录路径上容量最小值min。
(3)更新路径上各个边上的流量:将路径上各个边上的流量加上min。
(4)返回第二步,直到无法找到增广路径为止。
2. 算法分析Edmonds-Karp算法相对于Ford-Fulkerson算法来说,在同样的网络中,其时间复杂度更低,可以保证在O(VE^2)的时间内求解出最大流。
但是在某些特殊情况下仍然可能需要指数级时间复杂度。
最大流算法及其应用随着社会经济的发展和科技的进步,许多问题需要通过优化算法来解决,最大流算法就是其中之一。
最大流算法是在一个有向图中找到从源点到汇点的最大可能流的算法。
该算法在网络设计,交通流量控制,通信网络等领域有着广泛的应用。
1. 最大流问题在一个有向图G=(V,E)中,包含源点s和汇点t,每条边(u,v)上有一个容量c,表示该边的最大流量。
现要从源点到汇点流过尽可能多的流量,问最大可能的流量是多少?这就是最大流问题,寻找的答案是最大流量F。
2. 最大流算法最大流算法有多种实现方法,其中最著名的是 Ford-Fulkerson算法。
该算法的核心是寻找增广路径。
增广路径是一条从源点到汇点的路径,并且在该路径上所有边的容量都大于0。
通过将增广路径上的每一条边的流量都增加相同的值,就可以增加当前的流量。
重复这个过程直到不能再找到增广路径为止。
算法的详细步骤如下:1. 初始化所有边流量为0。
2. 查找增广路径。
可以使用深度优先搜索或广度优先搜索实现。
每找到一条增广路径就更新整个图的流量。
3. 重复步骤 2 直到无法再找到增广路径。
4. 输出最大流F。
该算法的时间复杂度不稳定,最差情况下是指数级的,但是由于增广路径的挖掘和流量的增加都是“往前走一步”,因此这种最长路径的情况是非常少见的。
在实际应用中,最大流算法基本上可以忽略这种情况。
3. 最大流算法应用(1) 网络设计在网络设计中,如果可以量化每个设备之间的容量,比如光缆的传输带宽,那么就可以使用最大流算法确定网络的最大传输能力。
如果网络的总传输能力超过了最大数据需求,那么可以减少设备之间的传输带宽,从而节省成本。
(2) 交通流量控制在城市交通中,最大流算法可以用来确定道路的拥堵情况,以及交叉路口的物流控制。
在公路建设中,如果能够准确地预测车辆数量和流量,就可以使用最大流算法确定道路的最大承载能力,从而保证交通的顺畅。
(3) 通信网络最大流算法也可以用于网络协议的设计。
最大流问题的算法研究最大流问题是一类重要的图论问题,它通常描述了一个网络中的最大数据流量。
研究这个问题可以解决很多实际问题,例如:供应链管理、网络通信等等。
在本文中,我们将探索不同的算法,以及它们如何应用于不同的情景。
1. 算法一:Ford-Fulkerson算法Ford-Fulkerson算法是最大流问题的经典算法。
它的基本思想是从一个初始流出发,不断地增加流量,直到达到最大流为止。
这个算法可以使用不同的增广方式进行增量,例如DFS、BFS等等。
但是这个算法存在一些问题,例如:存在死循环、时间复杂度过高等等。
2. 算法二:Dinic算法Dinic算法是一种快速的最大流算法,它使用了一个叫做Dinic图的结构来寻找最大流。
这种算法对于具有大量边的图具有很好的效率,并且不容易出现死循环,因此更加实用。
然而,这个算法对于稠密图并不是最优选择。
3. 算法三:Push-Relabel算法Push-Relabel算法是另一种流网络问题的经典算法。
它基于一个启发式规则,即“推动和重贴标签”,来分配高度和流量。
这个算法具有较好的稳定性和可扩展性,可以用于处理大量的节点和边。
但是这个算法在某些情况下的运算效率并不是最高的。
4. 算法四:预测推动算法预测推动算法是一种优化型的推动-标签算法,它通过利用已知流的预测来减少计算时间。
这个算法保证在较小时间复杂度的情况下寻找到最优解。
然而,在生成预测数据时需要进行很多预处理,这也带来了一些时间和空间上的压力。
总之,最大流问题是一类非常重要的图论问题,可以解决很多实际问题。
在不同的应用场景下,我们可以选择不同的算法进行解决。
每个算法都有自己的优点和局限性。
选用最适合的算法的选择可以大大提高算法效率,减少计算时间。
最大流算法在网络优化中的应用最大流算法是一种常用的图论算法,用于解决网络中流量分配的问题。
它在许多领域中都有广泛的应用,尤其在网络优化中发挥着重要的作用。
本文将介绍最大流算法的原理和几个具体应用案例。
一、最大流算法原理最大流算法的核心思想是通过构建一个有向图来描述网络流量的传递。
在图中,节点代表网络中的顶点或交叉点,边表示两个节点之间的连接。
每条边上都有一个容量,表示该边能够传递的最大流量。
最大流算法通过从源节点(Source)向汇节点(Sink)不断推送流量,并更新路径上的容量,直到不能再推送为止。
这样,最终的结果就是源节点向汇节点的最大流量。
二、最大流算法的应用1. 网络流量优化在计算机网络中,最大流算法被广泛应用于网络流量的优化问题。
通过最大流算法,可以确定从源节点到汇节点的最大可用带宽,从而实现网络资源的合理分配和利用。
在网络拓扑结构复杂的大型系统中,最大流算法能够帮助我们优化网络性能,提高数据传输效率。
2. 电力网络调度在电力系统中,最大流算法可以用来解决电力网络调度问题。
通过最大流算法,可以确定发电站到用户之间的最大功率传输,从而实现电力的高效分配。
在电力系统的规划和管理中,最大流算法能够帮助我们确保电力供需平衡,提高电网的可靠性和稳定性。
3. 交通网络优化最大流算法还可以用于交通网络的优化。
通过最大流算法,可以确定交通网络中各路段的最大通过能力,从而实现交通流量的合理调度。
在城市交通规划和管理中,最大流算法能够帮助我们减少交通拥堵,提高交通效率,优化交通资源的利用。
4. 供应链管理在供应链管理中,最大流算法可以用来优化物流路径和资源分配。
通过最大流算法,可以确定供应链中各个节点之间的最大货物流量,从而实现供应链的高效运作。
在供应链的规划和执行中,最大流算法能够帮助我们减少成本,提高服务水平,实现资源的最优配置。
三、总结最大流算法在网络优化中具有广泛的应用。
通过构建有向图模型,最大流算法能够帮助我们解决网络中的流量分配问题,实现资源的最优配置和利用。
网络最大流的算法网络最大流的算法分类:一、Ford-Fulkerson增广路方法1、Ford-Fulkerson标号算法(最简单的实现)分别记录这一轮扩展过程中的每个点的前驱与到该节点的增广最大流量,从源点开始扩展,每次选择一个点(必须保证已经扩展到这个点),检查与它连接的所有边,并进行扩展,直到扩展到t。
2、最大容量增广路算法每次找一条容量最大的增广路来增广,找的过程类似Dijkstra,实现起来相当简单。
3、Edmonds-Karp,最短路增广算法的BFS实现每次找一条最短的增广路,BFS是一个可以很方便的实现思想。
4、距离标号算法最短路增广的O(n)寻找实现,使用距离函数d:d[t]=0;d<=d[j]+1若存在(i,j)∈E;只有路径上满足d=d[i+1]+1的增广路才为满足要求的,一开始我们初始化使标号恰好满足要求,之后不断更改标号使其可以使增广继续。
5、Dinic,分层思想对网络分层(按照距t的距离),保留相邻层之间的边,然后运用一次类似于距离标号的方法(其实质是DFS)进行增广。
二、预留与推进算法1、一般性算法随便找个点,要么将他的盈余推出去,要么对他进行重标记,直至无活跃点为止。
2、重标记与前移算法维护一个队列,对一个点不断进行推进与重标记操作,直至其盈余为0,若过程中他没有被重标记过,则可出列,否则加入队头,继续等待检查。
3、最高标号预留与推进算法记录d值,然后优先处理d值较高的,直至没有盈余。
网络最大流的算法实现一、Edmonds-Karp(EK)算法就是用广度优先搜索来实现Ford-Fulkerson方法中对增广路径的计算,时间复杂度为O(VE2),Shortest Augmenting Path (SAP) 是每次寻找最短增广路的一类算法,Edmonds - Karp 算法以及后来著名的Dinic 算法都属于此。
SAP 类算法可统一描述如下:Shortest Augmenting Path{ x <-- 0while 在残量网络Gx 中存在增广路s ~> t do{ 找一条最短的增广路径Pdelta <-- min{rij:(i,j) 属于P}沿P 增广delta 大小的流量更新残量网络Gx}return x}在无权边的有向图中寻找最短路,最简单的方法就是广度优先搜索(BFS),E-K 算法就直接来源于此。
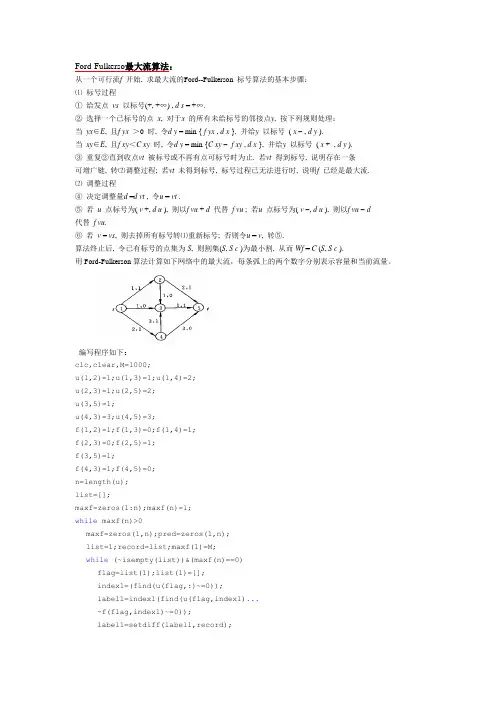
Ford-Fulkerso最大流算法:从一个可行流f 开始, 求最大流的Ford--Fulkerson 标号算法的基本步骤:⑴标号过程①给发点vs 以标号(+, +∞) , d s = +∞.②选择一个已标号的点x, 对于x 的所有未给标号的邻接点y, 按下列规则处理:当yx∈E, 且f yx >0 时, 令d y = min { f yx , d x }, 并给y 以标号( x - , d y ).当xy∈E, 且f xy<C xy 时, 令d y = min {C xy - f xy , d x }, 并给y 以标号( x + , d y ).③重复②直到收点vt 被标号或不再有点可标号时为止. 若vt 得到标号, 说明存在一条可增广链, 转⑵调整过程; 若vt 未得到标号, 标号过程已无法进行时, 说明f 已经是最大流.⑵调整过程④决定调整量d =d vt , 令u = vt .⑤若u 点标号为( v +, d u ), 则以f vu + d 代替 f vu ; 若u 点标号为( v -, d u ), 则以f vu - d代替 f vu.⑥若v = vs, 则去掉所有标号转⑴重新标号; 否则令u = v, 转⑤.算法终止后, 令已有标号的点集为S, 则割集(S, S c )为最小割, 从而Wf = C (S, S c ).用Ford-Fulkerson算法计算如下网络中的最大流,每条弧上的两个数字分别表示容量和当前流量。
编写程序如下:clc,clear,M=1000;u(1,2)=1;u(1,3)=1;u(1,4)=2;u(2,3)=1;u(2,5)=2;u(3,5)=1;u(4,3)=3;u(4,5)=3;f(1,2)=1;f(1,3)=0;f(1,4)=1;f(2,3)=0;f(2,5)=1;f(3,5)=1;f(4,3)=1;f(4,5)=0;n=length(u);list=[];maxf=zeros(1:n);maxf(n)=1;while maxf(n)>0maxf=zeros(1,n);pred=zeros(1,n);list=1;record=list;maxf(1)=M;while (~isempty(list))&(maxf(n)==0)flag=list(1);list(1)=[];index1=(find(u(flag,:)~=0));label1=index1(find(u(flag,index1)...-f(flag,index1)~=0));label1=setdiff(label1,record);list=union(list,label1);pred(label1(find(pred(label1)==0)))=flag;maxf(label1)=min(maxf(flag),u(flag,label1)... -f(flag,label1));record=union(record,label1);label2=find(f(:,flag)~=0);label2=label2';label2=setdiff(label2,record);list=union(list,label2);pred(label2(find(pred(label2)==0)))=-flag;maxf(label2)=min(maxf(flag),f(label2,flag)); record=union(record,label2);endif maxf(n)>0v2=n;v1=pred(v2);while v2~=1if v1>0f(v1,v2)=f(v1,v2)+maxf(n);elsev1=abs(v1);f(v2,v1)=f(v2,v1)-maxf(n);endv2=v1;v1=pred(v2);endendendf最大流通用程序%function [f,s]=maxflow(startp,endp,c)%c为容量网络%对容量网络的填写做一下说明%容量具有方向性,比如弧(i,j)的容量为10,弧(j,i)为0%即矩阵无须有对称性function [f,s]=maxflow(startp,endp,c)n=length(c);f=zeros(size(c));l=zeros(1,n);d=zeros(1,n);examine=zeros(1,n);l(startp)=0.5;d(startp)=inf;while 1ifexam=0;ifl=0;for i=1:nif l(i)~=0ifl=ifl+1;if examine(i)==1ifexam=ifexam+1;endendendif ifl==ifexambreak;endfor i=1:nif l(i)~=0&examine(i)==0break;endendfor j=1:nif c(i,j)~=0if f(i,j)<c(i,j)&l(j)==0l(j)=i;d(j)=min(d(i),c(i,j)-f(i,j)); endendif c(j,i)~=0if f(j,i)>0&l(j)==0l(j)=-i;d(j)=min(d(i),f(i,j));endendendexamine(i)=1;if l(endp)~=0j=endp;while 1if l(j)~=0.5if l(j)>0i=l(j);f(i,j)=f(i,j)+d(endp);j=i;endif l(j)<0i=-l(j);f(j,i)=f(j,i)-d(endp);j=i;endelsel=zeros(1,n);break;endendl(startp)=0.5;d(startp)=inf;examine=zeros(1,n); endends=[];ns=0;for i=1:nif l(i)~=0ns=ns+1;s(ns)=i;endendfprintf('f为最大可行流\n');fprintf('图的最小截划分得到的一个子集s为:\n');disp(s);。
最⼤流算法-最⾼标号预流推进(HLPP)昨天我们学习了ISAP算法,它属于增⼴路算法的⼤类。
今天学习的算法是预流推进算法中很⾼效的⼀类——最⾼标号预流推进(HLPP)。
预流推进预流推进是⼀种很直观的⽹络流算法。
如果给到⼀个⽹络流让你⼿算,⼀般的想法是从源点开始流,遇到不够的就减掉,⼀直往前推到汇点。
这就是预流推进算法的基本思想。
每个节点是⼀个储⽔池,最开始源点有⽆限多的⽔。
⽤⼀个队列维护需要处理的点。
最开始把源点加进去,对于每⼀个当前点,我们把将这个点⽔池中有的流量沿着边(⽔管)推到相邻的点,然后把相邻的点加⼊队列中。
算法思想如此,但其中有⼀个问题:这样做有可能出现两个点⼀个推过来⼀个推回去,结果就死循环了。
这时候我们给每个点引⼊⼀个⾼度来解决这个问题。
源点的⾼度为\(n\),汇点的⾼度为\(0\),其他点初始⾼度为0,我们规定,⽔往下⼀层流,即我们只推\(h[x]=h[v]+1\)的边\((x,v)\)。
如果⼀个点还有⽔,但是却⽆法推出去,即周围的点都⽐他⾼,那么我们就抬⾼这个点,因为\(h\)值是连续的,所以每次出现这种情况我们就给它加⼀。
如果这个点根本就流不出去,那么最后它会被抬⾼到\(n+1\)的⾼度,回流给源点。
最⾼标号Tarjan和Goldberg在1986年提出了最⾼标号预留推进算法,即把普通队列换成优先队列,每次取出⾼度最⾼的那个来推进。
Cheriyan和Maheshwari在1988年证明了这样做的复杂度为\ (O(n^2\sqrt m)\)。
优化喜闻乐见的gap优化,但和ISAP的形式不太⼀样。
如果我们发现在给⼀个点抬⾼1的⾼度的时候,这个点原来的⾼度已经没有点了,那么我们直接把⼤于这个⾼度的点全部设为⾼度\(n+1\),让他们回流到源点去,因为根据算法,他们⽆法再有机会把⽔推到汇点(为什么不能有下⾯⼀个点抬上来形成路径呢?因为⼀个点的⾼度是所有相邻点⾼度最⼩值加⼀,所以不可能出现这种情况)。
福特-福尔克森最大流算法Ford-Fulkerson Algorithm定理假设f是网络G=(V, E, s, t, c) 的一个流,则以下陈述等价:(a)f 是一个最大流(b) 当前f的剩余图中不存在可增广道路(c) 存在G的一个s-t割(S, T)使得| f | = cap( S, T )由(a)和(b)的等价性可以给出最大流的构造算法——福特-福尔克森最大流算法(Ford-Fulkerson,1956):最大流算法Ford-Fulkerson (G)输入:网络G = ( V, E, s, t, c )输出:G的一个最大流f1.初始流量选为0流量,即对所有边uv,f uv ← 02.构造G关于f的剩余图G f3.若G f中存在增广道路P,则按照前述方法由增广道路P构造G的一个新的流f ’,f←f ’,转到步骤2;否则输出fs234 5t10 1098 410106 2 0 0 0 0 0 0 0 0 G:0 流 容量Flow value = 0s23 4 5t101098 4101062G f :8 0 0 0 0 8 8 0 0s2345t1029842 1062G f :8 8Flow value = 8s234 5t1010 98 41010 6 2 8 0 0 0 0 8 8 00 G:s2345 t 1010984101062100 2 1082G: 0s2345 t 1010784101062G f:2Flow value = 10s2345 t 10109841010621066 8 1082G: 6s2345 t 41018410462G f:866Flow value = 16s2345 t 101098410106210288 8 108G: 6s2345 t 21018210262G f:88 82Flow value = 18s2345 t 101098410106210399 9 107G: 6s2345 t 11097110162G f: 19 93Flow value = 19s2 3 4 5 t 10 10 9 8410 10 6 2 10 39 991070 G: 6如果各边的容量都是整数,则每次“f ←f ’”的更新都使得流的值至少增加1,因此算法至多在 次后结束()sv v succ s c ∈∑E nd。
By ----Kash最近在在学习网络流,但是网上的网络流资料比较分散,所以总结一下,希望为大家带来帮助网络流定义:流网络G(V,E)是一个V有向图,其中S为源点,T为汇点。
定义:C(u,v)为u到v的容量,其中对于每条边(u,v)∈E,有C(u,v)≥0。
否则C(u,v)=0。
定义:f(u,v)为u到v的流量,对所有u,v∈V, 有f(u,v)≤c(u,v)。
∑f(u,v)称作网络的流,记作f(S,T) 定义:max(∑f(u,v))=max(f(S,T))为网络的最大流量。
记住|f(s,t)|残留网络定义:Cf(u,v)为u到v的残留容量, Cf(u,v)=C(u,v)-f(u,v)。
定义:残留网络Ef={(u,v)∈VXV,Cf(u,v)}石油残留边组成的网络。
定义:增广路径是起点为S,终点为T的一组边集,其中Cf(p)=min{cf(u,v):(u,v)∈p}称为增广路径的容量。
最大流最小割定义:割(S,T)将网络分成两部分,割得流等于∑c(u,v) ,(u∈S,v∈T) 记作c(S,T)。
明显f(S,T)≤c(S,T),我们以后用c(S,T) 表达最小割。
定理:若残留网络中不存在增广路,则当前流为最大流定理:最大流等于最小割证明:假设残留图Gf不存在增广路径,根据以下规则划分两个点集合S={v∈V:Gf 存在从s到v的路径}T={v∈V:v∉S}因为Gf不存在增广路,所以t ∉ S, 对顶点u,v, 若u∈S,f(u,v)=c(u,v),则v属于T,否则v属于 S,此时 f(S,T)=C(S,T),f(S,T)<=C(S,T) 所以f(S,T)为最大流,此时残留图中无增广路Ford-Fulkerson方法Ford-Fulkerson方法每次在残留图中寻找增广路,直到图中没有增广路结束。
伪代码:Memset(f,0,sizeof(f));While(exist path from s to t){Cf=min{cf(u,v): (u,v)in p}For(each (u,v) in p )F[u,v]+=cf;F[v,u]-=cf;}Ford-Fulkerson方法中寻找增广路可用BFS,或者DFS完成,其中DFS完成的算法效率低下。
最大流问题算法一、最大流问题简介最大流问题是图论中的一个经典问题,是指在给定一个有向图中,找到一个流量最大的流,从源节点流向汇节点的过程。
最大流问题在物流、通信网络、电力系统等领域有广泛的应用。
二、最大流问题算法分类2.1 Ford-Fulkerson算法Ford-Fulkerson算法是最大流问题的经典解法之一,基于增广路径的思想,通过多次寻找增广路径,不断增加网络中的流量,直到无法找到增广路径为止。
2.2 Edmonds-Karp算法Edmonds-Karp算法是对Ford-Fulkerson算法的一种改进。
它利用BFS(广度优先搜索)找出最短增广路径,从而加快了算法的收敛速度。
2.3 Dinic算法Dinic算法是一种高效的最大流算法,它基于分层图的思想,通过构建分层图和阻塞流的概念,有效地降低了算法的时间复杂度。
2.4 Push-relabel算法Push-relabel算法是一种基于预流推进和重贴标签操作的最大流算法。
它通过动态调整节点的剩余容量和高度来寻找最大流。
三、Ford-Fulkerson算法详解3.1 算法思想Ford-Fulkerson算法的思想很简单,即通过不断寻找增广路径,将增加的流量加到原有的流上,直到无法找到增广路径为止。
3.2 算法步骤1.初始化网络的流为0;2.利用DFS或BFS寻找一条增广路径;3.如果找到增广路径,则确定这条路径上的最小容量;4.增加流量,并更新网络中相关的容量;5.重复步骤2~4,直到无法找到增广路径。
3.3 算法复杂度Ford-Fulkerson算法的时间复杂度依赖于增广路径的选择策略。
最坏情况下,算法的时间复杂度为O(E * |f|),其中E为边的数量,|f|为最大流的流量。
四、Dinic算法详解4.1 算法思想Dinic算法基于分层图的思想,通过构建分层图和阻塞流的概念,有效地降低了算法的时间复杂度。
4.2 算法步骤1.构建分层图,确定每个节点的层次,并初始化节点的过剩容量;2.通过DFS在分层图上寻找阻塞流,直到找不到增广路径为止;3.更新每个节点的过剩容量和残余网络的容量;4.重复步骤2~3,直到无法找到阻塞流。
最大流算法在网络问题中的应用网络问题是计算机科学中的一个重要领域,主要研究节点之间的连通性,以及数据在网络中的传输和处理方式。
网络问题的解决方法之一就是最大流算法。
最大流算法可以用来求解网络流问题,是一种常用的优化算法。
下面将详细介绍最大流算法在网络问题中的应用。
一、最大流算法的定义最大流算法(Maximum Flow Algorithm)是计算最大流问题的常用算法,用于解决网络流问题。
最大流问题是在网络中从源点s 到汇点t的最大可行流问题,也可以理解为管道输送液体的最大流量问题。
最大流算法求解的本质就是如何找到一条从源点到汇点的路径,并计算出最大流量,以使所有流量达到最大。
二、最大流算法的应用最大流算法的应用非常广泛,在交通、卫星通信、电信等领域均有广泛应用。
下面分别从交通、卫星通信和电信三个方面来介绍最大流算法的应用。
1、交通领域在交通领域,最大流算法可以应用于城市道路布局规划、交通信号灯调度和公交线路规划等问题。
以城市道路布局规划为例,我们可以通过最大流算法来确定城市中心和周边地区之间的交通流量。
这样,我们就可以在城市道路规划过程中根据交通流量分配道路宽度和车行道数量,以确保道路能够承载最大交通流量。
2、卫星通信领域在卫星通信领域,最大流算法可以应用于网络拓扑设计、路由设计和带宽分配等问题。
通过最大流算法,我们可以确定卫星通信网中每个节点之间的最大传输速率,以便于选择最佳的路径或设计最优的路由方案。
此外,最大流算法也可以用于带宽管理,以确保卫星通信网中的每个节点都能够按照其需求获得足够的带宽。
3、电信领域在电信领域,最大流算法可以应用于网络拓扑设计、路由设计和负载均衡等问题。
电信网络中的节点之间互相连通,通过最大流算法,我们可以确定节点之间的最大传输速率,并根据传输速率设计最优的路由方案,以确保数据传输的完整性和可靠性。
此外,最大流算法还可以用于网络负载均衡,以确保所有节点的负载能够均衡分配。
最大流常见算法介绍最大流算法是图论中的经典问题之一,涉及在一个有向图中,确定从一个源节点到一个汇节点的最大流量。
最大流常见算法用来解决这个问题的是Ford-Fulkerson 算法和Edmonds-Karp算法。
本文将重点介绍这两种算法及其应用。
Ford-Fulkerson算法算法原理1.初始化网络流为0。
2.寻找一条从源节点到汇节点的增广路径(即路径上的边上还有可用容量)。
3.如果存在增广路径,则通过这条路径增加流量,并更新网络流。
4.重复2-3,直到不存在增广路径。
算法步骤1.使用深度优先搜索或广度优先搜索找到一条增广路径。
2.计算增广路径上可用容量的最小值,即该路径上所有边上的剩余容量的最小值。
3.更新增广路径上的每条边的流量,并更新网络流。
4.重复1-3,直到不存在增广路径。
时间复杂度Ford-Fulkerson算法的时间复杂度取决于寻找增广路径的方法。
使用深度优先搜索的时间复杂度为O(E|f|),其中E为边的数量,|f|为最大流量。
使用广度优先搜索的时间复杂度为O(VE^2)。
Edmonds-Karp算法算法原理Edmonds-Karp算法是Ford-Fulkerson算法的一种优化算法,使用广度优先搜索寻找增广路径。
与Ford-Fulkerson算法不同的是,Edmonds-Karp算法每次寻找增广路径时,选择最短路径(即路径上的边数最少)。
算法步骤1.使用广度优先搜索找到一条最短增广路径。
2.计算增广路径上可用容量的最小值,即该路径上所有边上的剩余容量的最小值。
3.更新增广路径上的每条边的流量,并更新网络流。
4.重复1-3,直到不存在增广路径。
时间复杂度Edmonds-Karp算法的时间复杂度为O(VE^2),其中V为节点数,E为边的数量。
应用最大流算法具有广泛的应用领域,包括但不限于以下几个方面: 1. 交通流量优化:在道路交通网络中,最大流算法可以用于优化交通流量分配,确保交通效率最大化。