清华大学飞思卡尔智能汽车教程共71页
- 格式:ppt
- 大小:6.64 MB
- 文档页数:71
![[电子教案(PPT版本)]“飞思卡尔”杯智能汽车设计与实例教程 (3)[72页]](https://uimg.taocdn.com/efb98131a5e9856a56126098.webp)
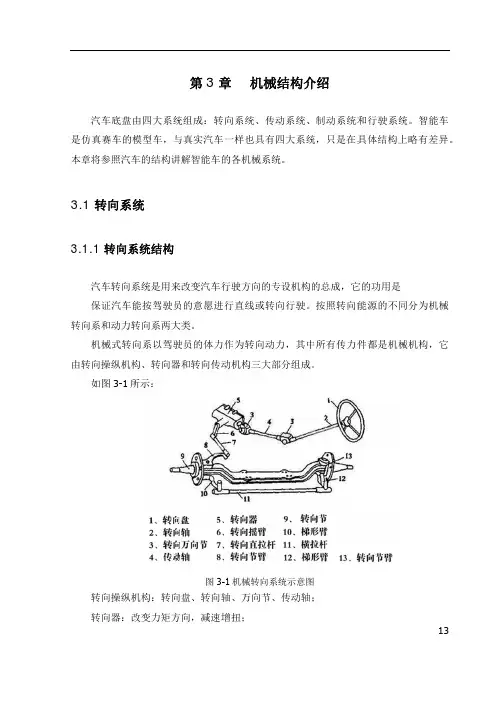
目录目录 (1前言 (3一、基于飞思卡尔芯片的智能循迹车 (11、智能循迹车简介 (12、摄像头组方案 (1(1CMOS模拟摄像头 (2(2CMOS数字摄像头 (33、光电组方案 (4(1红外传感器 (4(2激光传感器 (64、电磁组方案 (10(1工型电感传感器 (10(2色环电感传感器 (10(3硬件设计 (105、道路识别策略 (11(1摄像头信号采集 (12(2红外传感器信号采集 (13(3电磁传感器信号采集 (136、电机驱动 (147、速度检测 (168、调试策略 (17(1速度调试(以摄像头组为例子 (17(2综合调试 (18二、入门级别智能车方案——基于STC89C52单片机智能小车 (191、简介 (192、方案 (19(1基于红外传感器循迹方案 (19(2基于激光传感器循迹方案 (203、利用中断调制PWM占空比驱动直流电机 (23 (1直流电机的实物图片 (23(2直流电机的介绍 (23(3直流电机的驱动 (234、利于中断调制PWM占空比驱动舵机摇头 (24 1、舵机的原理及其应用 (24(1舵机的实物图片: (24(2舵机的介绍 (25(3舵机的工作原理 (255、数码管显示 (251、数码管原理 (256、LED流水灯控制 (27LED灯参考电路图 (277、液晶显示 (28(11602液晶显示 (28a主要技术参数 (28b信号接脚 (29c基本操作时序 (29d电路图接法 (29(212864液晶显示 (30a主要技术参数 (30b信号接脚 (30c基本操作时序 (30d电路图接法 (318、ADC0804 (319、DAC0832 (3210、I2C总线 (3411、矩阵控制 (3512、蜂鸣器控制 (36前言智能化是21世纪机电一体化技术发展的一个重要发展方向。
人工智能在机电一体化及自动控制领域日益得到重视,现阶段在机电一体化及自动化专业教学方式上,部分院校较重视实践而轻理论,部分院校较重视理论而轻实践,但有一个共同点就是:通过一些相关技能竞赛能够有效地提高学生的综合能力,在比赛过程中充分锻炼了参赛者理论知识和实操能力;如:飞思卡尔智能汽车竞赛,电子设计竞赛,机械创新设计竞赛,瑞萨竞赛等。
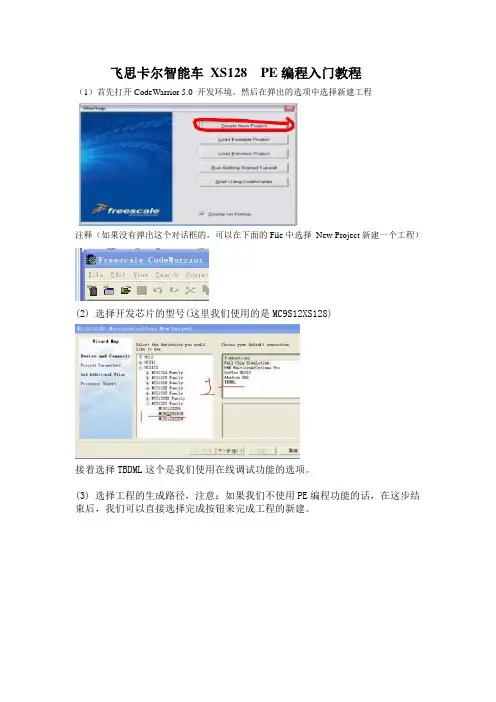
飞思卡尔智能车XS128 PE编程入门教程(1)首先打开CodeWarrior 5.0 开发环境。
然后在弹出的选项中选择新建工程注释(如果没有弹出这个对话框的,可以在下面的File中选择New Project新建一个工程)(2) 选择开发芯片的型号(这里我们使用的是MC9S12XS128)接着选择TBDML这个是我们使用在线调试功能的选项。
(3) 选择工程的生成路径,注意:如果我们不使用PE编程功能的话,在这步结束后,我们可以直接选择完成按钮来完成工程的新建。
(4) (PE编程功能的步骤)下一步,这个对话框我们什么都不用选择,直接点击下一步。
(5)选择下面这个选项来启动PE编程功能。
(6) 红色边框中的选项的功能为是否启动浮点数据的使用,默认第一个是不启用,第二个是启用,float数据为32位。
double为32位,第三个是启用,float 数据为32位,double数据为64位。
(7)最后一步什么都不要设置,直接点击完成。
(8) 以上步骤我们完成了一个XS128工程的新建步骤。
PE的使用步骤:(1) 新建工程后,会自动弹出个芯片封装型号的选择,选择好后点击OK。
(注意:我们学校有些芯片是80管脚的,也有112管脚的,所以注意选择红线标注的选项)(2) 点击OK后,就会出现我们要编程的环境了。
如下(3)红色标注的地方就是我们该工程的工作区了。
细心的同学就会发现,它生成的文件中没有我们需要写的源文件XXX.c 。
那我们现在就来生成这些文件。
找到下图的按键Processor Expert。
然后点击第二个选项的Generate Code ' XXXX .mcp' (这里的XXXX表示该工程名称).下面是自动生成的文件。
这时候我们发现软件为我们自动的生成了一个Project.c(Project 是我这个工程建立的文件命,不同的工程文件名将导致这个名字不同)的文件。
这个就是我们将要编写的源文件了,它里面包含了我们的主函数main()。