飞思卡尔智能车机械结构简介 共21页PPT资料
- 格式:ppt
- 大小:2.86 MB
- 文档页数:21
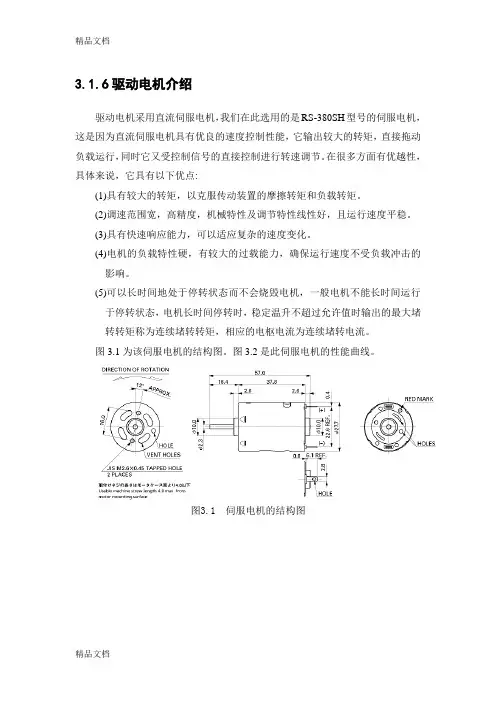
3.1.6驱动电机介绍驱动电机采用直流伺服电机,我们在此选用的是RS-380SH型号的伺服电机,这是因为直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。
在很多方面有优越性,具体来说,它具有以下优点:(1)具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。
(2)调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。
(3)具有快速响应能力,可以适应复杂的速度变化。
(4)电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击的影响。
(5)可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时间运行于停转状态,电机长时间停转时,稳定温升不超过允许值时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连续堵转电流。
图3.1为该伺服电机的结构图。
图3.2是此伺服电机的性能曲线。
图3.1 伺服电机的结构图图3.2 伺服电机的性能曲线3.1.7 舵机介绍舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图3.3所示。
图3.4为舵机的控制线。
图3.3 舵机控制要求图3.4 舵机的控制线控制线输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms-2ms之间。
而低电平时间应在5ms到20ms间,并不很严格。
下表3.3表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂的位置的关系:表3.3脉冲宽度与舵机位置表考虑到舵机安装的位置与舵机的响应速度有关,在设计中我把舵机安装在较高的位置,使转向拉杆加长,使得在舵机转动相同的角度时前轮(即方向轮)转动的角度加大,转向灵敏。
智能车制作F R E E S C A L E学院:信息工程学院班级:电气工程及其自动化132 学号:6101113078姓名:李瑞欣目录:1. 整体概述2.单片机介绍3.C语言4.智能车队的三个组5.我对这门课的建议一、整体概述智能车的制作过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作。
内容涵盖自动控制、模式识别、传感技术、电子、电气、计算机、机械与汽车等多学科多专业。
下面是一个智能车的模块分布:总的来说智能车有六大模块:信号输入模块、控制输出模块、数据处理模块、信息显示模块、信息发送模块、异常处理模块。
1、信号输入模块:智能车通过传感器获知赛道上的路况信息(直道,弯道,山坡,障碍物等),同时也通过传感器获取智能车自身的信息(车速,电磁电量等)。
这些数据构成了智能车软件系统(大脑)的信息来源,软件系统依靠这些数据,改变智能车的运行状态,保证其在最短的时间内按照规定跑完整个赛道。
2、控制输出模块:智能车在赛道上依靠转向机构(舵机)和动力机构(电机)来控制运行状态,这也是智能车最主要的模块,这个模块的好坏直接决定了你的比赛成绩。
电机和舵机都是通过PWM控制的,因此我们的软件系统需要根据已有的信息进行分析计算得到一个合适的输出数据(占空比)来控制电机和舵机。
3数据处理模块:主要是对电感、编码器、干簧管的数据处理。
信号输入模块得到的数据非常原始,有杂波。
基本上是不能直接用来计算的。
因此需要有信号处理模块对采集的数据进行处理,得到可用的数据。
4信息显示模块:智能车调试过程中,用显示器来显示智能车的部分信息,判断智能车是否正常运行。
正式比赛过程中可关闭。
主流的显示器有:Nokia 5110 ,OLED模块等,需要进行驱动移植。
5信息发送模块智能车的调试过程中,我们需要观察智能车的实时状态(采集的信号是否正常,输出是否正常),这个时候就需要用到信息发送模块,将智能车运行时的数据发送到电脑上就行分析处理。
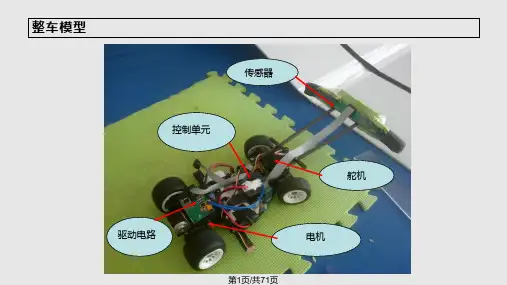
飞思卡尔智能车控制系统硬件设计硬件部分:电机舵机传感器车模电机:主要作用是产生驱动转矩,作为小车的动力源。
舵机:能够转舵并保持舵位的装置,也就是让小车拐弯的装置。
传感器:能感受规定的被测量并按照一定的规律转换成可用输出信号的器件或装置,在智能车中,最重要的传感器就是摄像头。
车模:智能车车架,包括底板、齿轮、车轮、电池等等。
主要内容:•MCU最小系统设计•电机及舵机驱动电路设计•光电检测电路原理与设计•图像检测原理与设计1.控制系统的构成一般控制系统由传感器、控制器和执行器组成。
智能车中主要体现:光电器件或器件构成的寻线传感器。
用于操纵小车行走和转向的执行器。
根据传感器信息控制执行器动作的控制器。
三者之间的关系可用如下的关系图描述:飞思卡尔杯规定了比赛用车模、控制器所使用的MCU、执行器、传感器的数量等,比赛中硬件设计所涉及的主要工作是:•设计可靠的MCU控制电路;•执行器驱动电路;•传感器电路;(进行硬件设计的工具很多,建议使用Protel99SE,该软件易上手、效率高,可满足一般电路设计要求。
)MC9S12DG128 的封装2 .MCU最小系统设计MCU最小系统设计分为供电系统设计、复位系统设计、时钟电路设计、BDM调试接口设计、串口通讯设计。
2.1 MCU供电系统设计MCU正常工作需要合理供电,为获取良好的抗干扰能力,电源设计很重要。
针对此次比赛使用的电池和MCU,在供电系统设计中要充分考虑以下因素的影响:1.系统供电电源为7.2V镍氢电池组,不能直接为MCU及其它TTL电路供电。
2.为保证较高的行驶速度,驱动电机需使用电池组直接驱动,故电源电压波动较大。
3.转向用舵机工作电压为5V,其启动电流较大,如与MCU共用5V电源,会引入较大的干扰。
4.采用三端稳压器7805存在效率低、抗干扰能力差的缺点。
采用三端稳压器的电源设计:升降压开关稳压电路•MCU供电飞思卡尔S12系列单片机采用了若干组电源,必须很好的对这些供电电源进行良好的滤波,才能设计出抗干扰能力强的控制器。