飞思卡尔智能车入门资料大全
- 格式:ppt
- 大小:2.51 MB
- 文档页数:33
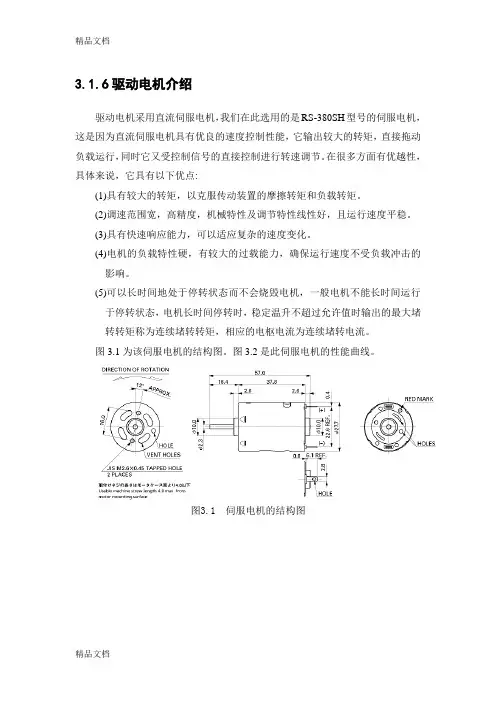
3.1.6驱动电机介绍驱动电机采用直流伺服电机,我们在此选用的是RS-380SH型号的伺服电机,这是因为直流伺服电机具有优良的速度控制性能,它输出较大的转矩,直接拖动负载运行,同时它又受控制信号的直接控制进行转速调节。
在很多方面有优越性,具体来说,它具有以下优点:(1)具有较大的转矩,以克服传动装置的摩擦转矩和负载转矩。
(2)调速范围宽,高精度,机械特性及调节特性线性好,且运行速度平稳。
(3)具有快速响应能力,可以适应复杂的速度变化。
(4)电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击的影响。
(5)可以长时间地处于停转状态而不会烧毁电机,一般电机不能长时间运行于停转状态,电机长时间停转时,稳定温升不超过允许值时输出的最大堵转转矩称为连续堵转转矩,相应的电枢电流为连续堵转电流。
图3.1为该伺服电机的结构图。
图3.2是此伺服电机的性能曲线。
图3.1 伺服电机的结构图图3.2 伺服电机的性能曲线3.1.7 舵机介绍舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。
它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
最后,电压差的正负输出到电机驱动芯片决定电机的正反转。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。
一般舵机的控制要求如图3.3所示。
图3.4为舵机的控制线。
图3.3 舵机控制要求图3.4 舵机的控制线控制线输入一个周期性的正向脉冲信号,这个周期性脉冲信号的高电平时间通常在1ms-2ms之间。
而低电平时间应在5ms到20ms间,并不很严格。
下表3.3表示出一个典型的20ms周期性脉冲的正脉冲宽度与微型伺服马达的输出臂的位置的关系:表3.3脉冲宽度与舵机位置表考虑到舵机安装的位置与舵机的响应速度有关,在设计中我把舵机安装在较高的位置,使转向拉杆加长,使得在舵机转动相同的角度时前轮(即方向轮)转动的角度加大,转向灵敏。

飞思卡尔智能车摄像头组新⼿指南(5)--让车跑起来篇舵机、电机控制策略让车跑起来彭岸辉控制器设置了快速的控制周期,在每个运算周期内,控制器即时地得到智能车车速以及传感器采样来的道路信号,经过控制算法的计算后,控制单元输出相应的前轮控制转⾓以及电机占空⽐的值,其输出值再经过函数映射关系转换为 PWM 脉宽信号传⾄前轮舵机以及驱动电机,从⽽实现⼀个周期的控制。
由于摄像头的信号是具有周期性的,可以直接采⽤摄像头采集⼀幅图像的周期作为控制周期。
舵机控制采⽤ PD 控制,控制跟随性较好,P可以及时对赛道的变化作出反应,当然舵机的 P 项值也是跟随赛道情况变化的,直道和较⼩的弯道时控制较弱,90 度弯道或 270 度⼤弯道控制量较强,D有预测道路类型的作⽤,也就是能使舵机提前打⾓。
电机控制采⽤ PID 控制,可以减⼩动态误差并且跟随性能较好。
当然也可以使⽤其他控制,很多⼈舵机采⽤P控制,电机采⽤PD或PI控制。
对⽐他们的优缺点⾃⼰选择适合⾃⼰⼩车的PID。
这⾥不进⾏深⼊讲解。
前⾯的⼯作完成后懂得基本的图像处理算法就差不多可以使⼩车跑起来了!要使⼩车跑起来其实不难的,很多初学者最希望的就是看⾃⼰的车跑起来,因为当初我也是这样的,很理解师弟师妹们此刻的想法!最基本的图像处理算法就是:图像中间往两边搜索⿊线注意:初学者在初学时不知道偏差是怎样计算的。
这⾥就提⼀下:偏差就是计算出的中线即图中赛道中的⿊线与摄像头所看到的中线即图中赛道中的竖直红线(例如采集到的图像是100列的,那么摄像头看到的中线就是50)做差得到的值就是偏差。
它表⽰车当前位置与期望位置的偏离程度。
再看个图吧:⽤两⾏来说明,其他的⼀样。
第⼀⾏左边坐标(0,1)右边坐标(0,99),得出的中线就是(0,50),那么50所在的那⼀列就是摄像头所看到的中线(就是图中竖直的红线)。
这⾥再提⼀下,很多⼈提出中线后发现上位机上或LCD上没显⽰出中线,其实显⽰出中线很简单的:根据RGB,⼀个像素点的像素值为255时显⽰出来的是⽩⾊,像素值为0时显⽰出来的是⿊⾊。
飞思卡尔智能车光电资料概述飞思卡尔智能车(Smart car)系列是一款基于飞思卡尔公司的光电传感技术的自动驾驶小车。
光电传感技术是利用光电元件将感受到的光信号转化为电信号,并通过处理电信号得到有用的信息。
飞思卡尔智能车光电资料提供了有关自动驾驶小车的光电传感器的详细信息,包括工作原理、技术规格和应用案例等。
工作原理飞思卡尔智能车光电传感器是通过感受周围的光线来实现环境感知和障碍物检测的。
光电传感器通常由发射器和接收器两部分组成,发射器将红外线或其他光束发射出去,接收器则接收到从目标物体反射回来的光线。
通过测量发射光束和接收光束之间的差异,可以判断目标物体的位置、形状和距离等。
光电传感器可以分为两种类型:距离传感器和线路传感器。
距离传感器主要用于测量目标物体与车辆之间的距离,常用于自动驾驶小车的防碰撞系统。
线路传感器主要用于检测车辆行驶的路径,常用于自动驾驶小车的导航系统。
技术规格飞思卡尔智能车光电传感器具有以下技术规格:•工作电压:3.3V•工作电流:10mA•输出信号:数字信号•工作距离:10cm - 100cm•发射角度:60度•接收灵敏度:高于5000Lux应用案例飞思卡尔智能车光电传感器广泛应用于自动驾驶小车的各个方面,包括但不限于以下应用案例:防碰撞系统飞思卡尔智能车光电传感器可以配备在车辆的前部,用于检测前方是否有障碍物。
当传感器检测到前方有障碍物时,会向控制系统发出警告信号,控制系统则会采取相应措施,如减速或避让,以防止碰撞事故的发生。
导航系统飞思卡尔智能车光电传感器可以配备在车辆的底部,用于检测车辆行驶路径。
传感器将红外线发射到地面上的线路上,通过接收反射回来的光线来确定车辆的行驶方向和位置。
导航系统可以根据传感器的信号来控制车辆的行驶轨迹,以实现自动驾驶。
环境感知系统飞思卡尔智能车光电传感器可以配备在车辆的四周,用于感知周围的环境。
传感器可以检测到周围物体的位置、形状和距离等信息,以帮助车辆做出相应的决策,如避让行人或停车等。
目录目录 (1前言 (3一、基于飞思卡尔芯片的智能循迹车 (11、智能循迹车简介 (12、摄像头组方案 (1(1CMOS模拟摄像头 (2(2CMOS数字摄像头 (33、光电组方案 (4(1红外传感器 (4(2激光传感器 (64、电磁组方案 (10(1工型电感传感器 (10(2色环电感传感器 (10(3硬件设计 (105、道路识别策略 (11(1摄像头信号采集 (12(2红外传感器信号采集 (13(3电磁传感器信号采集 (136、电机驱动 (147、速度检测 (168、调试策略 (17(1速度调试(以摄像头组为例子 (17(2综合调试 (18二、入门级别智能车方案——基于STC89C52单片机智能小车 (191、简介 (192、方案 (19(1基于红外传感器循迹方案 (19(2基于激光传感器循迹方案 (203、利用中断调制PWM占空比驱动直流电机 (23 (1直流电机的实物图片 (23(2直流电机的介绍 (23(3直流电机的驱动 (234、利于中断调制PWM占空比驱动舵机摇头 (24 1、舵机的原理及其应用 (24(1舵机的实物图片: (24(2舵机的介绍 (25(3舵机的工作原理 (255、数码管显示 (251、数码管原理 (256、LED流水灯控制 (27LED灯参考电路图 (277、液晶显示 (28(11602液晶显示 (28a主要技术参数 (28b信号接脚 (29c基本操作时序 (29d电路图接法 (29(212864液晶显示 (30a主要技术参数 (30b信号接脚 (30c基本操作时序 (30d电路图接法 (318、ADC0804 (319、DAC0832 (3210、I2C总线 (3411、矩阵控制 (3512、蜂鸣器控制 (36前言智能化是21世纪机电一体化技术发展的一个重要发展方向。
人工智能在机电一体化及自动控制领域日益得到重视,现阶段在机电一体化及自动化专业教学方式上,部分院校较重视实践而轻理论,部分院校较重视理论而轻实践,但有一个共同点就是:通过一些相关技能竞赛能够有效地提高学生的综合能力,在比赛过程中充分锻炼了参赛者理论知识和实操能力;如:飞思卡尔智能汽车竞赛,电子设计竞赛,机械创新设计竞赛,瑞萨竞赛等。

飞思卡尔智能车摄像头组入门指南摄像头摄像头的组成主要分为三部分:镜头、含传感器的处理芯片、外围电路板。
镜头主要就是一个凸透镜,透镜焦距越小越广角,同时桶形失真越严重;焦距越大,视角越窄,透镜越接近理想的“薄透镜”则可忽略桶形失真。
处理芯片将传感器上的电压信号按照已定义的协议输出。
外围电路主要提供电源、稳压、时钟等功能。
摄像头按照信号类型可分为模拟摄像头、数字摄像头两种。
由于单片机普通IO口只能读取数字信号,故对于模拟摄像头要设计模数转换(ATD)。
数字摄像头数据可以直接进单片机。
用模拟摄像头的缺点是要自己设计模数转换电路,同步信号分离电路。
优点是可以自行加入硬件二值化电路,即对某一个像素点只用1、0来表示黑、白。
摄像头按照传感器,可分为CCD、CMOS。
CCD成像质量好,贵。
CMOS 成像质量略差,便宜。
摄像头的选取从尽快实现,缩短开发时间的方面考虑,应购买数字摄像头。
典型的型号是OV7620(该型号是指处理芯片的型号)。
OV7620是CMOS数字摄像头,采用PAL制式,默认隔行扫描,默认YUV颜色空间输出(详见后文)。
长远考虑,应选取CCD模拟摄像头。
一来可以避免高速状态下的运动模糊,二来可以自行设计硬件二值化电路,FIFO电路等,大大降低CPU 运算压力。
摄像头信号协议介绍每秒超过24帧的连续图片即可形成动态的视频。
考虑到我国采用50Hz交流电,为了实现方便,摄像头被设计为每秒25帧,每帧耗时两个周期。
还是为了实现方便,每一帧图片被分为两半,每半帧耗时一个周期。
半帧的划分方式为:奇数行和偶数行各组成半帧。
即通常的电视机,每20ms奇数行的信息刷新一次,接下来20ms偶数行刷新一次,再20ms奇数行刷新一次……。
欧美采用60Hz交流电,摄像头每16.6ms刷新一次,被称为PAL制式。
摄像头拍摄的一帧画面被称为“一场”(field),一场又分为“奇场”和“偶场”,各称“半场”,合称“全场”。
像这样分奇偶场分别刷新的扫描方式被称作“隔行扫描”(interlace),某些摄像头支持“逐行扫描”(progressive),其意自见。