转向梯形机构计算及优化案.doc
- 格式:doc
- 大小:562.00 KB
- 文档页数:9
V ol 121 N o 18公 路 交 通 科 技2004年8月JOURNA L OF HIGHWAY AND TRANSPORT ATION RESEARCH AND DEVE LOPMENT文章编号:1002Ο0268(2004)08Ο0124Ο05收稿日期:2003Ο07Ο03作者简介:李玉民(1969-),男,河南南阳人,东南大学博士研究生,主要研究方向为载运工具运用工程1转向梯形驱动机构的运动分析及优化设计李玉民1,李旭宏1,过学迅2(11东南大学交通学院,江苏 南京 210096;21武汉理工大学,湖北 武汉 430070)摘要:转向梯形驱动机构的空间布置对汽车的操纵稳定性影响很大。
本文以常见的非独立悬架结构为例,建立空间几何模型进行运动分析,提出同时满足“与前悬架运动协调”和“左右转向力均匀”两方面要求的转向梯形驱动机构优化设计方法。
实践应用表明该方法可行。
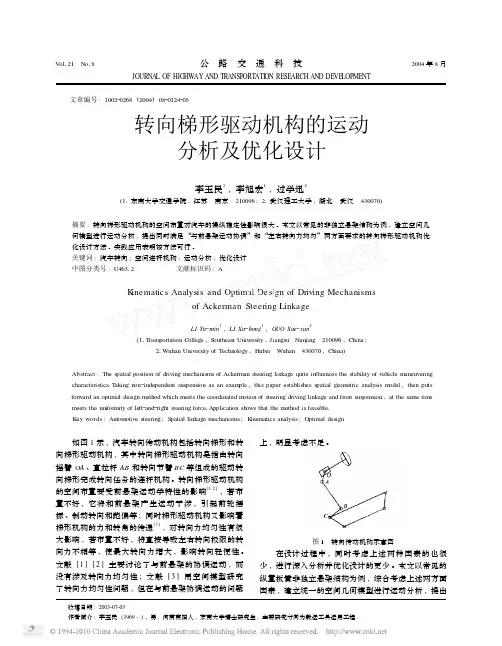
关键词:汽车转向;空间连杆机构;运动分析;优化设计中图分类号:U46312 文献标识码:AK inematics Analysis and Optimal De sign of Driving Mechanismsof Ackerman Steering LinkageLI Yu Οmin 1,LI Xu Οhong 1,G UO Xue Οxun2(11T ransportation C ollege ,S outheast University ,Jiangsu Nanjing 210096,China ;21Wuhan University of T echnology ,Hubei Wuhan 430070,China )Abstract :The spatial position of driving mechanisms of Ackerman steering linkage quite in fluences the stability of vehicle maneuvering characteristics 1T aking non Οindependent suspension as an example ,this paper establishes spatial geometric analysis m odel ,then puts forward an optimal design method which meets the coordinated m otion of steering driving linkage and front suspension ,at the same time meets the uniformity of left Οand Οright steering force 1Application shows that the method is feasible 1K ey words :Autom otive steering ;S patial linkage mechanisms ;K inematics analysis ;Optimal design 如图1示,汽车转向传动机构包括转向梯形和转向梯形驱动机构,其中转向梯形驱动机构是指由转向摇臂OA 、直拉杆AB 和转向节臂BC 等组成的驱动转向梯形完成转向任务的连杆机构。
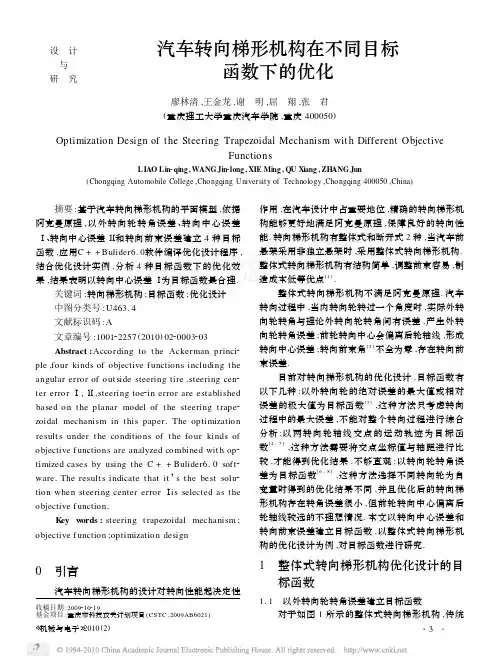
设 计与研 究汽车转向梯形机构在不同目标函数下的优化廖林清,王金龙,谢 明,屈 翔,张 君(重庆理工大学重庆汽车学院,重庆400050)Optimization Design of t he Steering Trapezoidal Mechanism wit h Different ObjectiveFunctionsL IAO Lin 2qing ,WANG Jin 2long ,XIE Ming ,QU Xiang ,ZHANG Jun(Chongqing Automobile College ,Chongqing University of Technology ,Chongqing 400050,China ) 摘要:基于汽车转向梯形机构的平面模型,依据阿克曼原理,以外转向轮转角误差、转向中心误差Ⅰ、转向中心误差Ⅱ和转向前束误差建立4种目标函数,应用C ++Bulider6.0软件编译优化设计程序,结合优化设计实例,分析4种目标函数下的优化效果,结果表明以转向中心误差Ⅰ为目标函数最合理.关键词:转向梯形机构;目标函数;优化设计中图分类号:U463.4文献标识码:A文章编号:100122257(2010)022*******收稿日期:2009210219基金项目:重庆市科技攻关计划项目(CSTC ,2009AB6021)Abstract :According to t he Ackerman princi 2ple ,four kinds of objective f unctions including t he angular error of out side steering tire ,steering cen 2ter error Ⅰ,Ⅱ,steering toe 2in error are established based on t he planar model of t he steering trape 2zoidal mechanism in t his paper.The optimization result s under t he conditions of t he four kinds of objective f unctions are analyzed combined wit h op 2timized cases by using t he C ++Bulider6.0soft 2ware.The result s indicate t hat it ’s t he best solu 2tion when steering center error Ⅰis selected as t he objective f unction.K ey w ords :steering t rapezoidal mechanism ;objective f unction ;optimization design0 引言汽车转向梯形机构的设计对转向性能起决定性作用,在汽车设计中占重要地位,精确的转向梯形机构能够更好地满足阿克曼原理,保障良好的转向性能.转向梯形机构有整体式和断开式2种,当汽车前悬架采用非独立悬架时,采用整体式转向梯形机构.整体式转向梯形机构有结构简单,调整前束容易,制造成本低等优点[1].整体式转向梯形机构不满足阿克曼原理.汽车转向过程中,当内转向轮转过一个角度时,实际外转向轮转角与理论外转向轮转角间有误差,产生外转向轮转角误差;前轮转向中心会偏离后轮轴线,形成转向中心误差;转向前束角[2]不全为零,存在转向前束误差.目前对转向梯形机构的优化设计,目标函数有以下几种:以外转向轮的绝对误差的最大值或相对误差的极大值为目标函数[3],这种方法只考虑转向过程中的最大误差,不能对整个转向过程进行综合分析;以两转向轮轴线交点的运动轨迹为目标函数[4-5],这种方法需要将交点坐标值与轴距进行比较,才能得到优化结果,不够直观;以转向轮转角误差为目标函数[6-8],这种方法选择不同转向轮为自变量时得到的优化结果不同,并且优化后的转向梯形机构存在转角误差很小,但前轮转向中心偏离后轮轴线较远的不理想情况.本文以转向中心误差和转向前束误差建立目标函数,以整体式转向梯形机构的优化设计为例,对目标函数进行研究.1 整体式转向梯形机构优化设计的目标函数1.1 以外转向轮转角误差建立目标函数对于如图1所示的整体式转向梯形机构,传统的优化设计中常用外转向轮转角误差作为目标函数[1].设内转向轮转角α为自变量,外转向轮转角β为因变量.按照阿克曼原理可求得理论外转向轮转角β,从转向梯形机构的平面模型可推导出实际外转向轮转角β′.β′应尽可能接近β.由于小转角在使用中较频繁,大转角较少使用,所以引入加权系数ω(α).设x 为设计变量;αmax 为内转向轮的最大转角.由外转向轮转角误差建立的目标函数为:f (x )=∑αmaxα=0ω(α) arccosk -r cos (θ0-α)k 2+r 2-2k r cos (θ0-α)arccot cot α+kl+arccosr (1-2cos 2θ0)-k[cos (θ0-α)-2cos θ0]k 2+r 2-2kr cos (θ0-α)-θ0arccot cot α+kl-1×100%(1)图1 整体式转向梯形机构1.2以转向中心误差Ⅰ建立目标函数整体式转向梯形机构不满足阿克曼原理,在汽车转向时,前轮转向中心O 点不在后轮轴线上,如图2所示.此时,转向中心误差可以用O 点到后轮轴线的距离|O H |来表示.将|O H |记为转向中心误差Ⅰ,从图2可知:|O H |=kcot β-cot α-l(2)在整个转向过程中,转向中心误差Ⅰ的总和越小则表示梯形机构越好,同样引入加权系数ω(α),由转向中心误差Ⅰ建立的目标函数f (x )为:f (x )=∑αmaxα=0ω(α)‖O H ‖=∑αmax α=0ω(α)kcot β-cot α-l(3)1.3 以转向中心误差Ⅱ建立目标函数整体式转向梯形机构不满足阿克曼原理,在汽车转向时,两前轮在后轮轴线上的交点分别为O 1,O 2,如图2所示.转向中心误差也可以O 1,O 2在后轮轴线上的距离|O 1O 2|来表示.将|O 1O 2|记为转向中心误差Ⅱ,从图2可知:|O 1O 2|=l !(cot α-cot β)+k (4)在整个转向过程中,转向中心误差Ⅱ的总和越小则表示梯形机构越好,同样引入加权系数ω(α),由转向中心误差Ⅱ建立的目标函数为:f (x )=∑αmaxα=0ω(α)‖O 1O 2‖=∑αmax α=0ω(α)|l ・(cot α-cotβ)+k |(5)图2 转向中心1.4 以转向前束误差建立目标函数转向前束的定义:当满足阿克曼原理时,两前轮轴线与后轮轴线汇交于一点,此时转向前束角为0.当不满足阿克曼原理时,两前轮轴线的交点不在后轮轴线上.此时可以假想将内外转向轮回转轴线按相反方向偏移一个相等的角度Δθ,使转向轮回转轴线和后轮轴线三者交于一点,满足阿克曼原理,这个假想的偏移角度Δθ就是转向前束角[2].整体式转向梯形机构的转向前束如图3所示,则有内外转向轮转角的关系为:cot (β+Δθ)-cot (α-Δθ)=kl(6)从式(6)可得:Δθ=arccot (2+2B +A C )±(2+2B +A C )2+4(A -C )(A -B C )2(A -C )(7)A =cot β-cot α;B =cot β!cot α;C =k l在转向过程中,转向前束值越小说明梯形机构的误差越小,同样引入加权系数ω(α),由转向前束误差建立的目标函数为:f (x )=∑αmaxα=0ω(α)|Δθ|(8)图3 转向前束2 设计变量与约束条件的确定2.1 设计变量在汽车设计中,对转向梯形机构的设计主要是选择合适的梯形臂长度r 和梯形底角θ0,因此选取r 和θ0两个参数为设计变量.即x ={r ,θ0}(9)2.2 约束条件在转向过程中,其误差在最常使用的中间位置附近小转角范围内应尽量小,以减小高速行驶时轮胎的磨损;而在不经常使用且车速较低的最大转角时,可适当放宽要求.并且考虑到多数使用工况下转角θ0小于20°,且10°以内的小转角使用得更加频繁,因此取加权系数为:ω(α)=1.50°<α≤10°1.010°<α≤20°0.520°<α≤αmax(10)r 和θ0两个参数过小时,会使横拉杆上的转向力过大;当r 过大时,将使梯形布置困难;当θ0越大,梯形越接近矩形,f (x )值就越大.所以各设计变量的取值范围构成的约束条件为:r -r min ≥0r max -r ≥0θ0-θ0max ≥0(11)其中梯形臂长度r 常取为r min =0.11k 、r max =0.15k;梯形底角θ0min =70°.3 优化设计实例某种汽车的转向传动机构参数为:轴距l =4700mm ,两主销间的距离k =1480mm ,梯形臂长r =199.8mm ,梯形底角θ0=75.5°,内转向轮的最大转角αmax =42°.根据上述建立的目标函数、设计变量和约束条件,选用C ++Bulider6.0软件编译优化设计程序.对实例分别在4个目标函数下进行优化计算,得到优化前后的设计变量如表1所示,优化前后的误差曲线如图4所示.表1 优化前后的设计变量设计变量优化前优化后外转向轮转角误差转向中心误差Ⅰ转向中心误差Ⅱ转向前束误差梯形臂长度(mm )199.8162.8162.8162.8162.8梯形底角(°)75.575.674.174.376.7 从表1可以看出,整体式转向梯形机构优化设计时,选择的目标函数不同,得到的梯形底角的最优值不一致,梯形臂长度的最优值基本一致.所以选择不同的优化目标函数对梯形底角有影响,但对梯形臂长度基本没有影响.在转向梯形机构中,梯形底角的变化会改变内、外转向轮的转角关系以及前轮转向中心的运动轨迹,梯形臂长度直接影响转向梯形机构的布置,引起汽车转向性能的改变.图4 优化前后的误差曲线从图4可以看出,以外转向轮转角误差为目标函数优化后,误差值变化不大,优化效果不太明显;以转向中心误差Ⅰ为目标函数优化后,优化效果显著,而且转角小于20°的误差值都很小,转向效果最好;以转向中心误差Ⅱ为目标函数优化后,虽然误差的总和减小了,但转角大于10°的误差都比原来增大了;以转向前束误差为目标函数优化后,误差总和减小了,大转角范围内的误差也减小了,但20°转角附近的误差明显增大.所以4个目标函数中,以转向中心误差Ⅰ为目标函数,优化结果较理想.4 结束语通过以上分析和优化设计实例可知:选择的目标函数不同,求解的梯形底角的最优值不相同,梯形臂长度的最优值基本相同.4个目标函数中,传统的以外转向轮转角为目标函数,优化效果不明显.以转向中心误差Ⅰ为目标函数最合理,优化效果显著,优化后的转向梯形机构更精确,能够更好地满足阿克曼原理.参考文献:[1] 王望予.汽车设计[M ].北京:机械工业出版社,2004.[2] 吴晓建.齿轮齿条式转向机构转向特性研究[D ].重庆:重庆理工大学,2009.[3] 王国安,郝子军.轮式推土机转向梯形优化设计[J ].西安公路学院学报,1986,(9):89-112.[4] 周全申,等.车辆转向机构设计与分析[J ].河南工业大学学报(自然科学版),2006,(4):60-66.[5] Mitchell Wm C ,Staniforth Allan ,Scott Ian.Analysis ofackermann steering geometry [A ].Motorsports Engi 2neering Conference and Exhibition[C].USA.2006.[6] Leishman Robert ,Chase Kenneth.A new tool for de 2sign and analysis of optimized rack and pinion steering Mechanisms[C].USA ,2009.[7] 姚明龙,王福林.车辆转向梯形优化设计及其求解方法的研究[J ].机械设计与制造,2007,(5):24-26.[8] 陈朝阳,张代胜.汽车转向梯形最优化设计[J ].安徽工学院学报,1982,(3):28-36.作者简介:廖林清 (1966-),男,四川眉山人,教授,硕士研究生导师,主要从事现代设计法的教学与应用研究.挠性陀螺仪内外接头的质量控制贺新华,田梦君(西北工业大学机电学院,陕西西安710072)Quality Cont rol of t he J unction Between Inside and Out side of Flexible Gyro scopeHE Xin 2hu a ,TIAN meng 2jun(School of Mechanical Engineering ,Northwestern Polytechnical University ,Xi ’an 710072,China ) 摘要:从理论分析计算的角度,分析了关键尺寸(宽度和厚度)对内外挠性接头性能的影响,研究了困扰批生产的接头外观的控制等,保证了接头的质量,提高了接头加工效率和合格率,降低了生产成本.关键词:内外挠性接头;尺寸控制;外观控制中图分类号:T H123文献标识码:A文章编号:100122257(2010)022*******收稿日期:2009209203Abstract :In terms of t heoretical analysis ,t he key parameters (widt h and t hickness )impacting on t he performances of flexible junction and t he con 2t rol strategy which conf used batch p roduction were analyzed and t he result s were given at last.The st rategy not only assured t he ability of gyroscopebut also imp roved t he efficiency of processing and t he acceptance rate was improved.K ey w ords :flexible gyroscope ;size control ;ap 2pearance cont rol0 引言内外挠性接头是挠性陀螺仪的关键部位,它把飞轮转子与底座电机的驱动轴连接起来,是引起陀螺仪基本误差的元件[1].可以说挠性接头性能的好坏,从某种程度决定了整个陀螺仪性能的好坏.接头的尺寸,外观设计要求很严,材料价格昂贵,批量生产中,超差、报废较多,直接经济损失较大.挠性接头的品质因素F M 对接头的性能起决定作用,其与总漂移误差成反比,即F M 越大,表示精度越高,因此,为了提高陀螺仪的精度,应尽可能增大F M .由F M =(J Z +I e )/(2I e -I Z ),可知,F M 与陀。
汽车整体式转向梯形机构仿真计算与优化首先,需要进行操纵性能仿真计算。
操纵性能是指车辆在转向过程中的稳定性、准确性和操纵力的大小。
通过建立车辆动力学模型,可以模拟车辆在不同转向输入下的行驶状态,并计算车辆的操纵性能参数,如转向响应时间、转向幅度和操纵力矩等。
通过对不同转向梯形机构参数的变化进行仿真计算,可以评估梯形机构对操纵性能的影响,并进行优化设计。
其次,还需要进行力学性能仿真计算。
力学性能是指转向机构在不同工况下的强度、刚度和耐久性等。
通过建立转向机构的有限元模型,可以分析转向机构在不同工况下的应力、应变和位移等力学参数,评估转向机构的设计是否满足强度和刚度要求,并进行优化调整。
同时,还可以通过应用疲劳分析方法,预测转向机构在长期使用过程中的损伤、疲劳寿命和可靠性等问题,以提高整体转向机构的耐久性。
最后,需要进行优化设计。
在进行仿真计算的基础上,可以通过参数优化和结构优化方法,对转向机构的参数和结构进行调整和改进。
例如,通过对齿条、滚珠丝杠、主动齿轮和从动齿轮等关键部件的几何参数进行优化,可以减小滚动摩擦和间隙,提高转向机构的机械效率和动力传递精度。
同时,还可以通过改变转向机构的布局和材料选择,减少转向机构的质量,并提高其刚度和强度,从而提升整体转向机构的性能。
综上所述,汽车整体式转向梯形机构的仿真计算与优化是确保汽车操纵性和稳定性的重要环节,能够通过操纵性能仿真计算、力学性能仿真计算和优化设计方法,对转向机构的性能进行评估和改进,提高汽车整体转向梯形机构的性能和可靠性。
齿轮齿条式转向器双梯形转向机构的优化设计李睿扬(学号:02000404)(东南大学机械工程系)汽车转向系统需精确地实现阿克曼转向条件,这与转向传动机构的设计密切关联。
在本文,将以与齿轮齿条式转向器配用的转向传动机构为实例,讨论机构的优化设计。
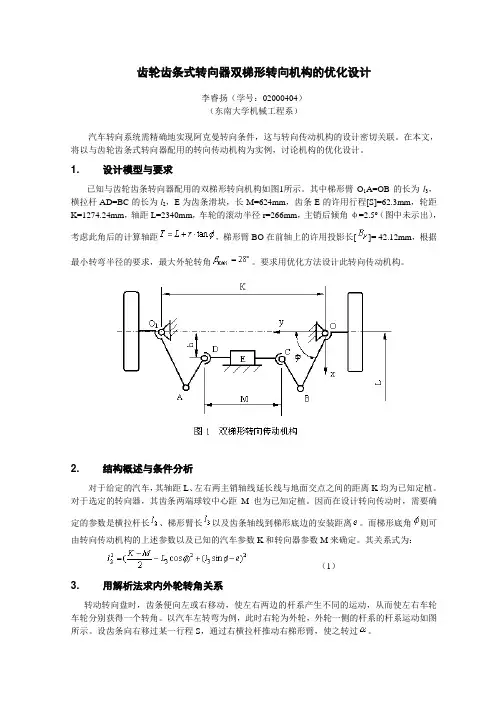
1.设计模型与要求已知与齿轮齿条转向器配用的双梯形转向机构如图1所示。
其中梯形臂O1A=OB的长为l3,横拉杆AD=BC的长为l2,E为齿条滑块,长M=624mm,齿条E的许用行程[S]=62.3mm,轮距K=1274.24mm,轴距L=2340mm,车轮的滚动半径r=266mm,主销后倾角φ=2.5o(图中未示出),考虑此角后的计算轴距,梯形臂BO在前轴上的许用投影长[]= 42.12mm,根据最小转弯半径的要求,最大外轮转角。
要求用优化方法设计此转向传动机构。
2.结构概述与条件分析对于给定的汽车,其轴距L、左右两主销轴线延长线与地面交点之间的距离K均为已知定植。
对于选定的转向器,其齿条两端球铰中心距M也为已知定植。
因而在设计转向传动时,需要确定的参数是横拉杆长、梯形臂长以及齿条轴线到梯形底边的安装距离。
而梯形底角则可由转向传动机构的上述参数以及已知的汽车参数K和转向器参数M来确定。
其关系式为:(1)3.用解析法求内外轮转角关系转动转向盘时,齿条便向左或右移动,使左右两边的杆系产生不同的运动,从而使左右车轮车轮分别获得一个转角。
以汽车左转弯为例,此时右轮为外轮,外轮一侧的杆系的杆系运动如图所示。
设齿条向右移过某一行程S,通过右横拉杆推动右梯形臂,使之转过。
图2 转向传动机构几何关系如图2所示,取梯形右底角顶点O为坐标原点,则可导出齿条行程S与外轮转角的关系:(2)另外,由图可知:(3)而,(4)(5)将(4)、(5)表达式代入(3)式。
因此,利用(2)式便可求出对应于任一外轮转角的齿条行程S,再将S代入公式(3)(4)(5),即可求相应的内轮转角。
将上述公式结合起来便可将表示为的函数,记作。
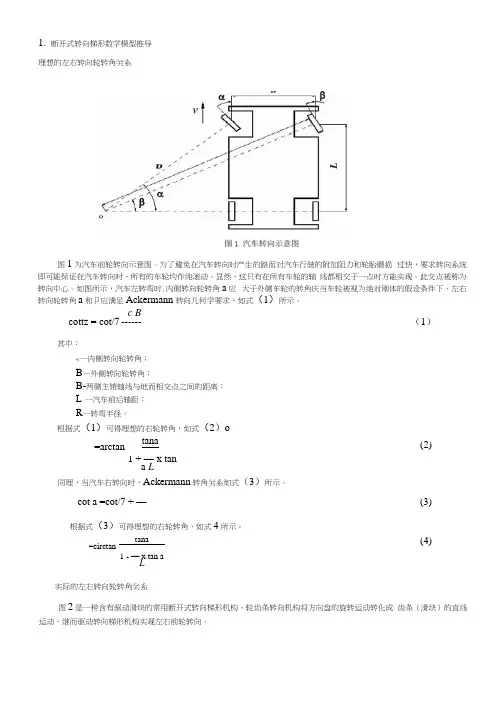
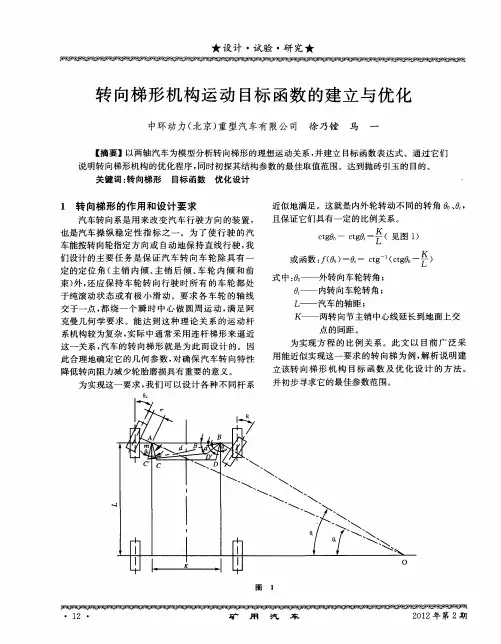
1.断开式转向梯形数学模型推导理想的左右转向轮转角关系图1为汽车前轮转向示意图。
为了避免在汽车转向时产生的路而对汽车行驶的附加阻力和轮胎磨损过快,要求转向系统即可能保证在汽车转向时,所有的车轮均作纯滚动。
显然,这只有在所有车轮的轴线都相交于一点时方能实现。
此交点被称为转向中心。
如图所示,汽车左转弯时.内侧转向轮转角a应大于外侧车轮的转角庆当车轮被视为绝对刚体的假设条件下,左右转向轮转角a和卩应满足Ackermann 转向几何学要求,如式(1)所示。
c Bcottz = cot/7 ------ (1)其中:«一内侧转向轮转角;B—外侧转向轮转角;B-两侧主销轴线与地而相交点之间的距离:L 一汽车前后轴距:R—转弯半径。
根据式(1)可得理想的右轮转角,如式(2)otana (2) =arctan1 + — x tana L同理,当汽车右转向时,Ackermann转角关系如式(3)所示。
(3)cot a =cot/7 + —根据式(3)可得理想的右轮转角,如式4所示。
tana(4)=circtan1 - — x tan aL实际的左右转向轮转角关系图2是一种含有驱动滑块的常用断开式转向梯形机构。
轮齿条转向机构将方向盘的旋转运动转化成齿条(滑块)的直线运动,继而驱动转向梯形机构实现左右前轮转向。
图中:厶一转向机齿条左右球较中心的距离;L 2 一左右横拉杆的长度;厶一左右转向节臂的长度:厶•一车轮中心至转向主销的距离:S] —转向齿条从中心位置向左的位移量: s 2 一转向齿条从中心位宜向左的位移量:y —转向齿条左右球狡中心连线与左右转向主销中心连线之偏距,图示位置取正值,反之取负值: S 。
一直线行驶时,转向齿条左球钱中心和左转向主销的水平距离:一转向节骨与汽车纵轴线的夹角。
运用余弦泄理和三角函数变换公式,经推导可得: ______________________-Cv - S xcos a = cos (ZAOB + Z.BOY )= 一;----- - ------------2厶(丁 +尸)A 点的坐标值为:v CxS-yx>jA 2 + B 2-C 2B2x (/+r )2*…Cxy + SxyjA 2 + B 2-C 2 沧=_ ------------- —zn ----------2x (/+S') 其中:A = -2LyxS,B = _2厶xy,C = 15,-1^-y 2-~s\ F —表示转向齿条弐球钱中心和左转向主销中心的实际距藹,对于直线行驶时,g = S 。
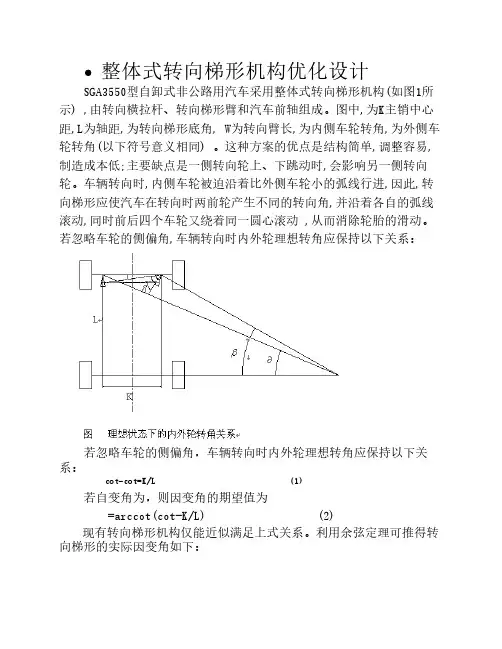
整体式转向梯形机构优化设计SGA3550型自卸式非公路用汽车采用整体式转向梯形机构(如图1所示) ,由转向横拉杆、转向梯形臂和汽车前轴组成。
图中,为K主销中心距,L为轴距,为转向梯形底角, W为转向臂长,为内侧车轮转角,为外侧车轮转角(以下符号意义相同) 。
这种方案的优点是结构简单,调整容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
车辆转向时,内侧车轮被迫沿着比外侧车轮小的弧线行进,因此,转向梯形应使汽车在转向时两前轮产生不同的转向角,并沿着各自的弧线滚动,同时前后四个车轮又绕着同一圆心滚动 ,从而消除轮胎的滑动。
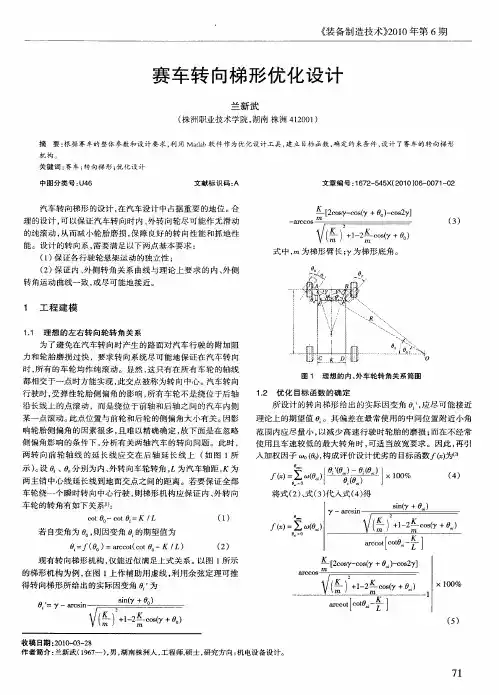
若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:若忽略车轮的侧偏角,车辆转向时内外轮理想转角应保持以下关系:cot-cot=K/L (1)若自变角为,则因变角的期望值为=arccot(cot-K/L) (2)现有转向梯形机构仅能近似满足上式关系。
利用余弦定理可推得转向梯形的实际因变角如下:图2(3)(4)(5)(6)由(4)(5)(6)式得出(7)(8)由(3)(7)(8)式得出:实际因变角要求:(1) 列出转向机构的优化数学模型(2) 已知轮距2900mm;轴距L= 3800 mm;主销中心距K= 2100 mm;用Matlab中lsqcurvefit(……)函数或lsqnonlin(……)函数进行优化,求取设计变量梯形底角的值(要求底角范围在60-90度之间),转向梯形臂长度的值(要求在250-450mm之间)以满足设计需求。
该优化问题可以看作是将理想的内外转向轮曲线同待优化的内外转向轮角度关系进行拟合,MATLAB优化工具箱中提供了几种可供选择的优化函数:(1) [x,resnorm]=lsqcurvefit(fun,x0,xdata,ydata,lb,ub),该函数是进行非线性曲线的二次拟合。
其中F(x)为待优化的函数,数学模型为:(2) [x,resnorm]=lsqnonlin(……),该函数求解非线性最小二乘问题,包括非线性数据拟合问题。
齿轮齿条式转向梯形的优化设计学院:车辆与能源学院专业:2012级车辆工程学号:S12085234009姓名:刘建霞日期:2014年4月15日齿轮齿条式转向器(如图1)具有结构简单紧凑,制造工艺简便等优点,不仅适用于整体式前轴也适用于前轮采用独立悬架的断开式前轴,目前被广泛地用于轿车、轻型客货车、微型汽车等车辆上。
与该转向器相匹配的转向梯形机构与传统的整体式转向梯形机构相比有其特殊之处,下面举一实例加以说明.图1 齿轮齿条式转向梯形机构运动实体模型题目:已知某微型汽车(如图2所示)各参数如下:1274.24K mm =,0()=2.5β主销后倾角,L(轴距)=2340mm ,=mm r (车轮滚动半径)266,=oy B y 梯形臂球头销中心的()42坐标.12mm ,由最小转弯半径得最大外轮转角为28o ,许用齿条行程[]62.3S mm =,选用参数624M mm =,试设计转向传动机构。
要求:(1)用优化方法设计此转向梯形传动机构。
(2)优化后校验,压力角40o α≤。
(3)计算出l 1长度,齿条左右移动最大距离。
图2 齿轮齿条转向梯形机构一 建模由转向基本要求可知,在不计轮胎侧偏时,实现转向轮纯滚动、无侧滑转向的条件是内、外轮转角符合Arckerman 理想转角关系:cot cot /O i k L θθ-=,如图3所示.图3 理想的内外轮转角关系(1)设计变量:选取变量 1(,,)X l h γ=图4 外轮一侧杆系运动情况由图4内外轮转角的关系得:221o 21o l cos(r )l [sin()h]2K M S l r θθ-=-+-+-(1) S M K h 22arctan +-=ϕ (2)221222221)2(2)2(arccos h S M K l l h S M K l ++--++-+=γ (3) i r θφγ=-- (4)联立上式可得o ()i g θθ=的函数关系式.对于给定的汽车和选定的转向器,转向梯形机构有横拉杆长l 1和梯形臂长m 两个设计变量。
整体式转向梯形机构的优化设计随着机械设备的不断发展,对于机构的优化设计也变得越来越重要。
其中,整体式转向梯形机构是一种常见的机构类型,它在工业领域中具有重要的应用价值。
本文将探讨整体式转向梯形机构的优化设计。
整体式转向梯形机构是一种通过摆动约束框架来实现转向功能的机构。
目前,其主要应用领域为车辆转向系统。
通常情况下,该机构由主动轮、从动轮、转向架以及梯形连杆等部件组成。
其中,主动轮和从动轮通过梯形连杆相互连接,转向架则通过约束框架连接至主动轮和从动轮上,以实现车轮的转向功能。
整体式转向梯形机构的优化设计主要从以下几个方面展开:首先,对于梯形连杆的设计要求。
梯形连杆是整个机构的核心部件,其尺寸和形状对机构的性能起着至关重要的作用。
因此,在进行设计时,应根据机构的具体使用环境和转向要求,合理确定梯形连杆的尺寸和形状,以保证机构的工作稳定性和可靠性。
其次,对于转向架的设计要求。
转向架主要起到连接主动轮和从动轮的作用。
在优化设计中,应考虑到转向架的稳定性、刚度以及连接方式等因素,以确保转向架的性能达到要求。
再次,对于摆动约束框架的设计要求。
摆动约束框架用于约束转向架的转向运动,使车轮能够良好的适应路面的起伏和承受各种路况下的压力。
因此,在设计时,应考虑到摆动约束框架所承受的载荷和力矩的大小,以提高机构的适应性和稳定性。
最后,对于轮胎的选择要求。
整体式转向梯形机构的性能也受到轮胎的影响,因此,在进行优化设计时,应选择具有优良性能的轮胎,以提高车辆的使用寿命和行驶安全性。
综上所述,整体式转向梯形机构的优化设计应从多个方面展开,在具体应用中,根据不同情况灵活调整优化方案。
相信通过更加精细的优化,整体式转向梯形机构将能更好地满足工业生产和社会发展的需求,为推动机械设备的高质量发展做出更大的贡献。
数据分析是对大量数据进行分析和解释的过程,以发现潜在的模式、预测趋势或寻找关联性。
在现代社会,数据分析已经成为各个领域的重要部分。
前言汽车工业开展的关键是汽车设计的更新和提高。
近几年来,随着用户对产品需求的日益多样化,汽车产品开发竞争也越来越剧烈,特别是随着以计算机为代表的信息技术的出现。
汽车设计方法有了新的飞跃,设计过程彻底改变,并进入一个新的阶段——计算机辅助设计阶段,计算机辅助设计可以明显提高设计效率,降低设计本钱,使得设计周期大大缩短。
目前,世界上兴旺国家的不少汽车公司已经大量采用计算机技术对汽车进展辅助设计,设计质量和设计效益有了很大的提高,加快了产品更新换代,提高了产品的竞争力,并正朝着智能型计算机辅助设计开展。
而我国汽车设计长期处于传统的低效的手工设计阶段,尽管近今年来我国汽车工业开展迅速,前后引进了许多国家的先进技术和产品,形成了批量生产汽车的能力。
但是在汽车设计方面,尤其是在汽车的优化设计方面还与国外存在着相当大的差距。
利用计算机进展最优化设计,是在六十年代才开展起来的一门新技术。
国内在近几年才开场从事这方面的研究与应用。
值得注意的是,虽然在汽车设计中采用最优化技术的历史时间很短,但其进展的速度确实十分惊人的。
无论在机构综合,通用机械零部件设计方面,还是在各种专业机械和工艺装备的设计方面都由于采用了最优化技术而取得了显著成果。
开展速度如此迅猛的原因,一方面是由于生产实践中有大批最优化的问题等待人们去解决,另一方面是由于计算机日益广泛的使用,为采用最优化技术提供了一个得力的计算工具。
运用计算机进展汽车最优化设计,对整个汽车设计学科产生了十分深刻的影响,使许多过去无法解决的关键性问题,获得了重大突破,可以说它正在引起机械设计领域里的一场革命。
优化设计作为一种新兴的技术,尽管目前还不很成熟和完善,但正在日益广泛的受到人们的重视。
转向梯形机构是汽车转向传动机构中很关键的一局部,在汽车转向系统中为了减少轮胎磨损,减小转向力,保证汽车转向时的内、外转向轮尽可能作纯滚动,这一要求由转向梯形机构的几何性能来实现。
汽车的转向梯形对于汽车的工作状况,譬如汽车的平安驾驶等诸多方面具有重要的实际意义,以前技术人员往往通过FORTRAN或VISUAL、C++等计算语言,利用复合变形法、惩罚函数法、简约梯度法等现代设计理论的方法来进展最优化设计;但苦于没有标准的子程序可以调用,技术人员往往将自己编好的程序逐条敲入计算机,然后进展调试,最后进展最优化设计,这样的程序当其中任何一条语句有了毛病,甚至调试不当〔如数组维数不匹配〕,那可能导致错误结果的出现。
汽车整体式转向梯形机构仿真计算与优化
1汽车整体式转向梯形机构
汽车整体式转向梯形机构是汽车转向系统的重要组成部分,将驱动轴连接到车轮,形成一个梯形的整体机构,具有尺寸小、重量轻、安装容易、结构稳定等优点。
汽车整体式转向梯形机构可以显著改善汽车的行驶及操纵性能,从而提高汽车的安全性能。
2相关仿真计算
为了计算汽车整体式转向梯形机构的性能,使用计算机辅助工程软件进行仿真计算,获取梯形机构在不同载荷下的结构变形、动态参数和响应频谱,综合参数判断汽车整体式转向梯形机构的安全性和可靠性。
进一步用实验计算模型,模拟汽车实际行驶中的结构响应,更好地分析转向系统整体性能。
3优化设计
计算机仿真计算结果可以及时反馈至优化设计,使汽车整体式转向梯形机构得到不断改进。
基于多目标优化,可以改变机构的参数,同时充分考虑机构的性能指标和视觉外观,得到更合理的设计。
4结论
汽车整体式转向梯形机构是汽车转向系统的重要组成部分,可以大大改善汽车的行驶及操纵性能,提高汽车的安全性能。
针对汽车整
体式转向梯形机构,可以通过计算机仿真计算获取参数,从而进行多目标优化设计,得到更合理优化的结果。
转向梯形机构确定、计算及优化转向梯形有整体式和断开式两种,选择整体式或断开式转向梯形方案与悬架采用何种方案有联系。
无论采用哪一种方案,必须正确选择转向梯形参数,做到汽车转弯时,保证全部车轮绕一个瞬时转向中心行驶,使在不同圆周上运动的车轮,作无滑动的纯滚动运动。
同时,为达到总体布置要求的最小转弯直径值,转向轮应有足够大的转角。
5.5.1转向梯形结构方案分析1.整体式转向梯形图5-14 整体式转向梯形1—转向横拉杆2—转向梯形臂3—前轴整体式转向梯形是由转向横拉杆1,转向梯形臂2和汽车前轴3组成,如图5-14所示。
其中梯形臂呈收缩状向后延伸。
这种方案的优点是结构简单,调整前束容易,制造成本低;主要缺点是一侧转向轮上、下跳动时,会影响另一侧转向轮。
当汽车前悬架采用非独立悬架时,应当采用整体式转向梯形。
整体式转向梯形的横拉杆可位于前轴后或前轴前(称为前置梯形)。
对于发动机位置低或前轮驱动汽车,常采用前置梯形。
前置梯形的梯形臂必须向前外侧方向延伸,因而会与车轮或制动底板发生干涉,所以在布置上有困难。
为了保护横拉杆免遭路面不平物的损伤,横拉杆的位置应尽可能布置得高些,至少不低于前轴高度。
2.断开式转向梯形转向梯形的横拉杆做成断开的,称之为断开式转向梯形。
断开式转向梯形方案之一如图5-15所示。
断开式转向梯形的主要优点是它与前轮采用独立悬架相配合,能够保证一侧车轮上、下跳动时,不会影响另一侧车轮;与整体式转向梯形比较,由于杆系、球头增多,所以结构复杂,制造成本高,并且调整前束比较困难。
图5-15断开式转向梯形横拉杆上断开点的位置与独立悬架形式有关。
采用双横臂独立悬架,常用图解法(基于三心定理)确定断开点的位置。
其求法如下(图5-16b):1)延长B K B 与A K A ,交于立柱AB 的瞬心P 点,由P 点作直线PS 。
S 点为转向节臂球销中心在悬架杆件(双横臂)所在平面上的投影。
当悬架摇臂的轴线斜置时,应以垂直于摇臂轴的平面作为当量平面进行投影和运动分析。
2)延长直线AB 与B A K K ,交于AB Q 点,连AB PQ 直线。
3)连接S 和B 点,延长直线SB 。
4)作直线BS PQ ,使直线AB PQ 与BS PQ 间夹角等于直线A PK 与PS 间的夹角。
当S 点低于A 点时,BS PQ 线应低于AB PQ 线。
5)延长PS 与B BS K Q ,相交于D 点,此D 点便是横拉杆铰接点(断开点)的理想的位 置。
图5-16断开点得确定以上是在前轮没有转向的情况下,确定断开点D位置的方法。
此外,还要对车轮向左转和向右转的几种不同的工况进行校核。
图解方法同上,但S点的位置变了;当车轮转向时,可认为S点沿垂直于主销中心线AB的平面上画弧(不计主销后倾角)。
如果用这种方法所得到的横拉杆长度在不同转角下都相同或十分接近,则不仅在汽车直线行驶时,而且在转向时,车轮的跳动都不会对转向产生影响。
双横臂互相平行的悬架能满足此要求,见图5-16a和c。
5.5.2整体式转向梯形机构优化设计1.优化设计的一般过程以机械产品设计为例,通常的设计方法是从任务中给定的原始数据出发,通过理论计算或经验性的类比试凑,先确定若干主要的参数,然后按照强度、刚度、几何等方面的限制条件进行必要的验算,以判断这些参数是否合理。
如果不合理,则妖对其中某些参数做适当的更改,再进行验算,知道满足各项限制条件为止。
这样的设计方法不但使设计人员要消耗大量的时间和精力,而且最后确定的参数方案也只能作为一种认可的方案,而并不一定是一种最优方案。
因此,设计工作中就提出了这样一个问题:能否找到某种方法或途径,使所选择的参数不仅满足各种限制条件,而且使它在某一方面达到最理想的效果。
例如机械性能指标最好,用料最省或成本最低等。
这样一个问题就是机械产品设计中的最优化设计问题,简称优化设计问题。
机械优化设计的一般过程与传统的设计方法有所不同,它是以计算机自动设计选优为其基本特征的,其过程可分为四个阶段。
(1)工程设计问题的提出。
首先决定设计目标,它可以是单项设计指标,也可以是多项设计指标的组合。
从技术经济观点出发,机器的运动学和动力学性能、体积、质量、效率、成本、可靠性等都可以作为设计所追求的目标,然后分拆设计应满足的要求。
主要有以下三类:一类是某些设计参数的取值范围;二类是由某些设计性能或指标根据设计规范推导出的性能要求;三类是工艺条件对某些设计参数的限制等。
(2)建立数学模型。
将以上工程设计问题用数学方程式的形式予以全面地、准确地描述,其中包括:根据设计目标建立起评价设计方案优劣的目标函数;把设计应满足的各类要求以等式或不等式的形式建立约束方程;确定哪些参数参与优选,也就是确定设计变量。
这里,一是要准,必须严格提按各种规范建立相应的数学描述;二是要全,必须把设计中应考虑的各种因素全部包括进去,这两点对于整个优化设计的效果是至关重要的。
一个优化问题首先要把它用数学的形式表达出来,也就是要建立一个数学模型。
最优化问题的数学模型必须考虑设计变量、设计约束和目标函数等诸方面才能完整地予以描述。
下面我们将分别讨论这些问题。
机械设计地一个方案常用一组参数来表示。
在各类不同的设计问题中,这些参数也是各不相同的。
但概括起来不外是两种类型:一是几何参数,例如零件的直径、长度尺寸,齿轮的模数、变位系数等;令一类是物理参数,例如力、功率、质量、效率等。
最优化问题中设计变量的数目称为该问题的维数。
设计变量越多,即问题的维数越高,则设计的自由度也越大,容易得到比较理想的设计结果。
但随着设计变量的增多也必然使问题复杂化,给优化设计带来更大的困难,因此在一般情况下,设计者还应尽量减少设计变量的数目为好。
对于那些按照过去设计经验或工艺生产要求能给予规定的值先确定为设计常量,则对设计所追求的目标影响比较大的少量参数选定为设计变量。
根据设计变量的多少。
可将最优化设计的题目分成三种。
设计变量有2~10个为小型题目:设计变量有10~50个为中型题目;而设计变量在50个以上的称为大型题目。
根据文献报道,目前已解决200个变量的优化问题。
在机械设计问题中,设计变量一般总要受到某些条件的限制,这些限制条件就称为设计约束。
设计约束一般分为两大类:边界约束和性能约束。
所谓边界约束是指考虑到设计变量的许可变化范围而给予的一种界限条件。
例如,在机构设计中,杆件的长度必须满足max 0l l ≤<,某铰链支点的位置需限定在21A A A X X X ≤≤,21A A A Y Y Y ≤≤范围内等;在齿轮设计中,为避免非变位齿轮的根切和结构尺寸上的合理性,齿数的选择范围一般限制在12017≤≤Z 范围内等。
所谓性能约束是指由机械工作性能所提出的一些限制条件,例如:设计一曲柄摇杆机构需要各杆的长度关系满足曲柄存在的条件;齿轮设计中需要所选的参数满足接触强度和弯曲强度条件等。
设计约束在数学模型中用约束函数不等式来表示:⎪⎭⎪⎬⎫⋅⋅⋅==≥⋅⋅⋅=≤q u X h X g p u X g v u u ,,2,10)(0)(,,2,10)(式中,)(X g u ,)(X h v 是按设计限制条件建立起来的函数关系式,称为约束函数。
)(X g u ≤0和)(X g u ≥0形式的设计约束称为不等式约束条件,简称不等约束。
)(X h v =0形式的约束则称为等式约束条件,简称等约束。
由于引入了设计约束,设计点X 在n 维设计空间内就被分成两个部分。
一部分是满足设计约束条件的设计点,称之为可行设计点,可行设计点的集合D 称为可行设计区域,或称可行域;另一部分是不满足设计约束条件的设计点,称之为非可行设计点,这种设计点的集合为非可行域。
当设计点处于某一不等约束条件的边缘上时,该设计点称为边界设计点。
这是一个为该约束所允许的极限设计方案。
带有约束条件的最优化问题称为约束最优化问题。
显然,没有约束条件的则称为无约束最优化问题。
约束最优化问题较之无约束最优化问题难度要更大一些。
在机械设计中,大多数问题都属于约束最优化问题。
最优化设计是要在多种因素下寻求使人满意的、最适宜的一组参数。
这里所指的“最满意”和“最适宜”当然都是针对某具体问题体现出来的人们所追求的某一特定目标而言的。
根据特定问题所追求的目标,用设计变量的数学函数来表达它,这就是优化设计的目标函数,也称评价函数。
对于有n 个设计变量的最优化问题,目标函数可以写成),,,()(21n x x x F X F ⋅⋅⋅=目标函数的值是评价设计方案优劣程度的标准。
在一般情况下,我们是追求目标函数的最小值,即目标函数值最小,设计方案最优。
当然,对于某些设计问题也可以追求目标函数的的最大值(如追求效率最高),但对于追求)(X F 极大值的问题也可转化为追求-)(X F 的极小值问题。
故在下面叙述中的最优化问题,都把优化过程看成是追求目标函数极小值的过程。
目标函数有单目标函数和多目标函数之分,仅根据一项设计准则建立起来的目标函数称为单目标函数。
若某项设计要求同时兼顾若干个设计准则,这就是多目标函数,例如设计一多档汽车变速器的设计准则为:a )要求箱体体积最小,即各齿轮中心距之和为最小;b )要求质量最轻,即齿轮、轴等体积之和最小;c)要求设计的变速器噪声最小等。
工程实际问题中存在的大多数问题属于多目标优化问题。
由于这类问题要同时考虑多个指标,往往比较复杂,所以多目标函数的最优化问题比起单目标函数来就复杂得多了。
(3)选择优化方法。
根据数学模型中的函数的性质,设计的精度要求等选择适用的优化方法,并做出相应的程序设计。
我们简单介绍一下较为常用的复合形法。
复合形法的基本思想来源于单纯形法,它实质上是对单纯形法的修正。
复合形法的大致过程是这样的:在可行域内选取K 个设计点作为初始复合形的顶点,通常取n K n 21≤≤+。
比较这些顶点的目标函数值,其中目标函数值最大的为坏点,以坏点之外其余各点的中心为映射中心,寻找坏点的反射点。
如果反射点优于坏点,则以反射点代替坏点,构成新的复合形。
依次步骤重复多次,使复合形的位置越来越靠近最优点,最后输出复合形中目标函数值最小的点作为近似最优点。
现以一个二维问题为例,在可行区域内先找出)1(X ,)2(X ,)3(X ,)4(X四个点作为初始复合形的顶点,计算这四个点的目标函数值,并作比较,得出好点)(L X 与坏点)(H X 。
)(L X :{}K i X F X F i L ,,2,1),(min )()(⋅⋅⋅==)(H X :{}K i X F X F i H ,,2,1),(max )()(⋅⋅⋅==若点)2(X 为好点)(L X,点)1(X 为坏点)(H X 。
以点)2(X ,)3(X ,)4(X 三点之中心)0(X 为映射中心,寻找)(H X 之反射点)(R X ,)()()0()0()(H R X X X X -+=α式中α为反射系数。