基于声音导引的声源定位系统设计
- 格式:pdf
- 大小:252.82 KB
- 文档页数:3
基于单片机的声音定位系统的设计【摘要】声音定位技术利用声学与电子装备,接收声波来确定声响模块具体位置的一种技术,它是一种重要的军事侦察手段,同时在其他方面也有广泛的应用。
本系统采用低功耗MSP430单片机作为控制器,控制整个声音定位系统的协调工作,在一块平板上贴一张坐标纸,在其四角外侧分别固定安装一个声音接收模块,通过驻极体话筒检测音频信号,然后声音接收模块将声音信号传送至信息处理模块,判定声响模块所在的位置的X、Y坐标,并以数字形式在液晶上显示X、Y坐标值。
【关键词】低功耗MSP430单片机;声音定位;声音接收模块;声响模块1.声音定位系统发展现状声音定位在人的日常生活中着重要意义。
例如,当你独自行走时,突然听到一个响声.你会想到这个声音什么意思,对你有无威胁,它来自何方等等。
确定声音的方向和距离需要比较来自两耳信息,然后做出对比判断和反应。
声音定位技术利用声学与电子装备接收声波来确定声响模块具体位置的一种技术,它是一种重要的军事侦察手段,产生于第一次世界大战。
开始根据火炮发出的声音测定火炮位置。
其系统有多个声测哨站与声测中心组成,两者用电缆连接。
声测哨站根据传感器接受信号,声测中心记录信号并根据同一信号到达不同传感器的时间差计算火炮位置。
声音定位在战场之外也同样具有广泛的应用前景。
它可用于电话会议系统、视频会议系统、可视电话等系统中的控制摄像头和传声器阵列波速方向对准正在说话的人;也可用于语音及说话人识别软件的前端预处理,以提供高质量的声音信号,提高语音及说话人识别软件的识别率;亦可用于强噪声环境下的声音获取、大型场所的会议记录,以提高声音拾取质量;还可用于助听装置中,更好地为耳障患者服务等。
2.本系统的功能本声音定位系统,在一块不大于1m2的平板上贴一张500mm×350mm的坐标纸,在其四角外侧分别固定安装一个声音接收模块,声音接收模块通过导线将声音信号传输到信息处理模块,声音定位系统根据声响模块通过空气传播到各声音接收模块的声音信号,判定声响模块所在的位置坐标。
可移动声源定位系统设计近年来,移动声源定位系统被广泛应用于语音识别、声音增强、语音通话等领域,因为它能够有效地解决人们在使用这些设备时遇到的问题。
在本文中,我们将详细介绍可移动声源定位系统的设计。
一、系统需求分析在设计可移动声源定位系统之前,首先需要对其需求进行分析。
根据用户的需求和使用场景,我们可以得出以下要求:(1)系统需要具备实时性和准确性,以满足用户对实际环境变化的要求。
(2)系统需要具备较高的定位精度,以满足用户对移动目标位置的要求。
(3)系统需要能够自适应地调整定位参数,以满足不同环境下的定位需求。
(4)系统需要能够满足不同科技应用的要求,包括虚拟现实、增强现实、游戏等。
二、系统设计方案在了解了用户需求后,我们可以考虑采用以下系统设计方案:(1)系统架构设计: 可移动声源定位系统可以分为两部分,即移动声源及其监测设备和声源定位分析器。
移动声源监测设备主要用于捕捉声源的声音信号,并将其传输到声源定位分析器。
声源定位分析器根据声音信号以及其他参数,实现对移动声源的精确定位。
(2)声音信号采集: 在移动声源监测设备中,我们采用微机电系统(MEMS)麦克风阵列。
由于MEMS麦克风阵列的体积小、灵敏度高、容易集成,可以满足我们对移动声源信号采集的要求。
(3)声音信号处理: 在声源定位分析器中,我们将使用数字信号处理技术,对采集到的声音信号进行处理。
主要包括滤波、能量计算、谱计算等操作。
其中,滤波操作用于滤除杂音和干扰信号;能量计算用于估计声源能量;谱计算用于估计频谱特征,如功率谱密度、频率、相位等。
(4)声源定位: 对于声源定位算法,我们将采用传统的波束形成算法或基于深度学习的算法进行。
波束形成算法基于麦克风阵列的均衡化和音源宽带响应特性,将目标声源的方向信息提取出来。
基于深度学习的算法利用深度卷积神经网络,提取输入特征的抽象表示,以此获得更好的分类和定位精度。
(5)优化算法: 在系统设计中,我们需要考虑优化算法以提高系统性能。
基于STM32的声音定位系统引言声音定位技术是近年来备受关注的一项技术,它可以通过声音信号的接收和处理,确定声源的位置。
这项技术在军事、安防、医疗等领域均有着广泛的应用,而随着技术的发展,声音定位系统也逐渐向普通民用领域渗透。
为了满足市场对于声音定位系统的需求,一些厂家推出了基于STM32的声音定位系统。
本文将介绍基于STM32的声音定位系统的设计及实现方法。
一、声音定位系统的工作原理声音定位系统是通过多个麦克风阵列收集声音信号,并利用算法处理声音信号,从而确定声源的位置。
通常,声音定位系统包括声音采集模块、数字信号处理模块和控制模块。
声音采集模块:声音采集模块采用多个麦克风构成的麦克风阵列,用于接收来自不同方向的声音信号。
多个麦克风可以接收到同一声源的声音信号,并通过麦克风之间的时间差或声音强度差来确定声源的位置。
数字信号处理模块:声音信号采集后,需要进行数字信号处理,一般包括信号滤波、时域分析、频域分析、噪声抑制等处理步骤。
处理后的声音信号可以更准确地确定声源的位置。
控制模块:控制模块通常采用微处理器或嵌入式系统,用于控制声音采集模块和数字信号处理模块的工作,并根据处理结果确定声源的位置。
二、基于STM32的声音定位系统的设计与实现基于STM32的声音定位系统通常包括硬件设计和软件设计两部分。
硬件设计:声音定位系统的硬件设计主要包括声音采集模块、数字信号处理模块和控制模块。
声音采集模块一般采用麦克风阵列,通过多个麦克风接收声音信号。
数字信号处理模块一般采用DSP或FPGA芯片,用于对采集到的声音信号进行处理。
控制模块一般采用STM32系列的单片机,用于控制声音采集模块和数字信号处理模块的工作,并进行数据处理和结果输出。
软件设计:声音定位系统的软件设计主要包括嵌入式软件和PC端软件。
嵌入式软件主要运行在STM32单片机上,用于控制硬件模块的工作,并进行声音信号的处理。
PC端软件一般用于与声音定位系统进行通信,接收处理结果并进行显示、记录等操作。
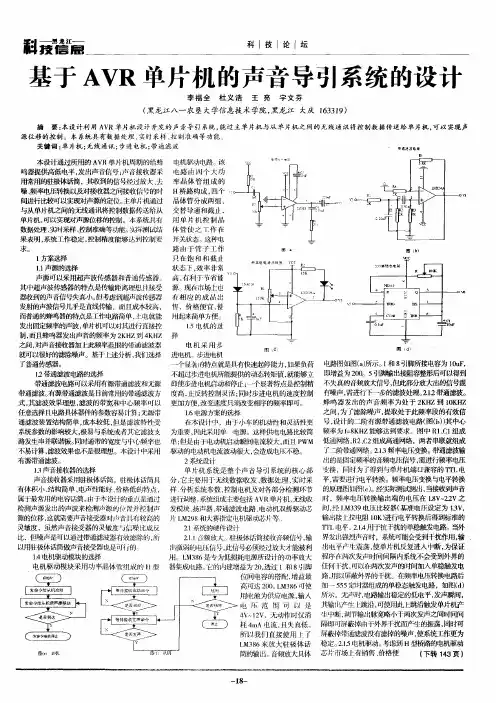
基于AT89S52的声音导引系统设计作者:冯洋来源:《现代电子技术》2010年第08期摘要:介绍了声音导引系统的设计与实现。
该系统包括单片机系统电路、声源调制电路、接收器电路、步进电机驱动电路、声光提示电路等。
采用两块单片机(AT89S52)分别作为可移动的声源的检测和控制核心。
由单片机1根据三个接收器接收声源信号的先后时间确定声源当前的位置,再由无线发送给单片机2。
单片机2利用ASSP芯片(型号MMC-1)控制电机的转速实现可移动声源的运动控制,并且移动到位后给出声光提示。
该电路设计方法简单、功耗低、性价比高,经调试可实现声音导引系统的精确控制。
关键词:单片机; 声音导引; 移动声源; ASSP芯片中图分类号:TP271文献标识码:B文章编号:1004-373X(2010)08-0182-04Design of Voice Guidance System Based on AT89S52FENG Yang(Weinan Teachers University, Weinan 714000, China)Abstract:The design and implementation of the voice guidance systerm are introduced. The system consists of SCM system circuit, sound source modulation circuit, receiver circuit, stepping motor drive circuit and acoustoopic cuecircuit.Two single chip computers (AT89S52) are respectively used as the mobile sound source detection and control cores. The current location of the sound source is determined by MCU1 according to the time sequence of receiving a sound source signal by three receivers, and then is sent to the MCU2 through radio. MCU2 uses ASSP chip microcontroller (model MMC-1) to control the motor speed to achieve the motion control of mobile source, and sends out an acoustooptic cue when arriving at the designated place. The circuit is simple and haslow power consumption and high cost-performance ratio. The precise control of the voice guidance system can be realized by debugging.Keywords:single chip computer; voice guidance; moving sound source; ASSP chip0 引言2009年全国大学生电子设计大赛的B题是“声音导引系统”;题目要求设计并制作一声音导引系统声音导引系统有一个可移动声源S,三个声音接收器A,B,C,声音接收器之间可以有线连接。
可移动声源定位系统设计一、系统原理可移动声源定位系统基于声波的传播特性,通过收集声波信号的时间差和相位差信息,计算声源位置。
该系统由多个节点组成,每个节点都有麦克风接收声波信号,然后将信号通过无线传输方式发送到一个中心节点,中心节点计算出声源位置并将位置信息反馈给用户。
二、系统硬件设计1. 麦克风阵列麦克风阵列是收集声波信号的核心部件,其设计要求能够有效地捕捉声源的声波信号。
本系统采用了六个麦克风组成的线性阵列,阵列中每个麦克风之间的距离为1.5厘米。
2. 数据采集卡数据采集卡是用来将麦克风阵列收集到的声波信号转换为数字信号,以便进行后续计算。
本系统采用了PCIe接口的数据采集卡,采样率为48kHz,位深为24位。
3. 中央处理器中央处理器是系统的核心,用于计算声源位置和与用户进行交互。
本系统采用了英特尔i7处理器,主频为3.6GHz,内存为16GB。
4. 无线模块无线模块是用来将数据从分布式节点传输到中心节点。
本系统采用了2.4Ghz的无线模块,最大传输速率为2Mbps。
1. 信号处理算法信号处理算法是用来对从麦克风阵列收集到的声波信号进行处理,以得到时间差和相位差信息。
本系统采用了交叉相关算法(Cross-Correlation)和相位差算法(Phase Difference),以提高定位精度。
2. 定位算法定位算法是用来计算声源位置的核心算法。
本系统采用了三边定位算法(Three-Side Localization Algorithm),能够通过三个节点接收到的信号时间差信息计算出声源位置。
3. 用户界面设计用户界面是用来与用户进行交互的重要组成部分。
本系统采用了图形用户界面(Graphical User Interface),将声源位置以地图图像的形式展现给用户,增强用户体验。
四、实验结果通过对可移动声源定位系统进行实验测试,得到了较为理想的实验结果,可正确地计算出声源位置。
在不同环境下进行测试,定位误差在1-2米之间,可以满足实际应用需求。
目录目录第1章绪论 (1)1.1课题研究的目的与意义 (1)1.2课题研究的内容与要求 (2)1.3国内外发展状况 (3)1.3.1 国内智能机器人发展概况 (3)1.3.2 国外智能机器人发展概况 (4)1.4智能移动机器人的广泛应用 (7)1.5智能移动机器人的发展趋势展望 (8)第2章系统方案论证和比较 (12)2.1系统整体方案比较与选择 (12)2.1.1 误差信号判断方式的比较与选择 (13)2.1.2 接收器分布方式的比较与选择 (13)2.1.3 移动体运动方式的比较与选择 (13)2.2系统各模块选择与论证 (14)2.2.1 车体方案的选择 (14)2.2.2 电源种类方案的选择 (15)2.2.3 供电方式方案的选择 (15)2.2.4 主控器芯片方案的选择 (16)2.2.5 电机驱动方案的选择 (16)2.2.6 电机模块方案的选择 (17)2.2.7 声源与声音传感器方案的选择 (17)2.2.8 声音调理期间的选择 (18)2.3制导系统方案的理论计算 (19)2.3.1 误差信号的产生 (19)2.3.2 滤波电路的理论计算 (20)2.3.3 声源定位原理 (20)2.4驱动系统方案的理论计算 (21)2.4.1 电机运行速度理论计算 (21)2.4.2 控制理论的简单计算 (22)第3章系统硬件设计 (23)i吉林工程技术师范学院本科毕业论文设计3.1系统总体框图设计 (23)3.2系统各模块硬件设计 (24)3.2.1 控制器子系统硬件设计 (24)3.2.2 声音接受子系统硬件设计 (27)3.2.3 电机驱动子系统硬件设计 (29)3.2.4 发声系统硬件设计 (30)第4章系统软件设计 (33)4.1系统主程序流程图 (33)4.2系统各模块子程序流程图 (34)4.2.1 声源位置计算子程序流程图设计 (34)4.2.2 电机驱动子程序流程图设计 (35)4.2.3 光标示子程序流程图设计 (36)4.2.4 PWM算法子程序 (36)4.2.5 控制接收器的子程序流程图设计 (36)第5章测试方案与测试结果 (38)5.1测试方案 (38)5.1.1 测试仪器 (38)5.1.2 测试数据 (39)5.2测试结果与误差分析 (40)5.2.1 测试结果分析 (40)5.2.2 误差分析 (40)附录 (41)致谢 (47)ii第1章绪论第1章绪论随着计算机技术和人工智能技术的飞速发展, 使机器人在功能和技术层次上有了很大的提高。
基于单片机的声音导航定位系统的设计关健生(厦门理工学院,福建厦门,361024)摘要:详细阐述了基于单片机的声音导航定位系统的设计过程,并给出了主要电路图。
该系统是以智能小车为运动体的声音定位测控系统,控制器由主从结构的两片STC89C52单片机构成,主芯片同时对三个处于不同位置的声音接收模块的音频信号进行处理和时间差测量,从芯片控制小车上的声源发出音频信号,根据主芯片用无线信号传送过来的误差信号,引导小车往目的地运动,也可实现路线选择及较精确定位 ,使该声音导航定位小车具有智能化。
关键词:单片机;声音定位;无线收发1 引 言 工业生产、生活的自动化都离不开智能化的机器,譬如:人们对太空的探索,对单调工作的替代,在危险环境中的操作等都需借助于智能化的行走、运动机构。
智能小车作为最常用的行走机构在工业生产与生活中得到了广泛的应用。
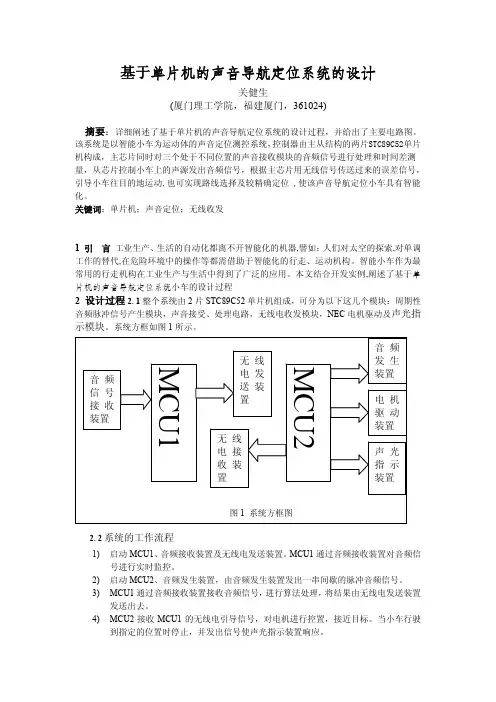
本文结合开发实例,阐述了基于单片机的声音导航定位系统小车的设计过程2 设计过程2. 1整个系统由2片STC89C52单片机组成,可分为以下这几个模块:周期性音频脉冲信号产生模块,声音接受、处理电路,无线电收发模块,NEC电机驱动及声光指示模块。
系统方框如图1所示。
2. 2系统的工作流程1)启动MCU1、音频接收装置及无线电发送装置。
MCU1通过音频接收装置对音频信号进行实时监控。
2)启动MCU2、音频发生装置,由音频发生装置发出一串间歇的脉冲音频信号。
3)MCU1通过音频接收装置接收音频信号,进行算法处理,将结果由无线电发送装置发送出去。
4)MCU2接收MCU1的无线电引导信号,对电机进行控置,接近目标。
当小车行驶到指定的位置时停止,并发出信号使声光指示装置响应。
压陶瓷片接收声音信号通过NE5532运放组成的音频检测放大电路。
压电陶瓷片由多晶体结构的压电材料锆钛酸铅制成。
在压电陶瓷片的两个底面加上正弦交变电压,它就会按正弦规律发生纵向伸缩,同样压电陶瓷可以在声压的作用下把声波信号转化为电信号。
声音定位系统介绍声音定位系统是一种通过声音的方向和距离来确定声源位置的技术。
声音定位系统在很多领域中都有广泛的应用,包括通信、安全监控、自动驾驶等。
本文将介绍声音定位系统的原理、应用以及未来发展趋势。
原理声音定位系统的原理基于声音在空气中传播的特性。
当声源发出声音时,声波会在空气中传播,并且以特定的速度以球面的形状扩散。
当声波到达接收器时,通过计算声波到达不同接收器的时间差(Time of Arrival,TOA),可以确定声源的方向。
另外,通过接收器之间的距离差异(Time Difference of Arrival,TDOA),可以确定声源的距离。
声音定位系统通常由多个麦克风阵列组成。
这些麦克风分布在不同的位置上,并通过算法来处理接收到的声音信号。
常用的算法包括交叉相关函数(Cross-Correlation Function,CCF)和迭代最小二乘(Iterative Least Squares,ILS)等。
这些算法可以通过比较接收到的声音信号的差异来确定声源位置。
应用声音定位系统在许多领域中都有广泛的应用。
通信声音定位系统可以用于改善通信质量。
通过确定对方的位置,系统可以自动调整音频的方向和音量,以提供更好的听觉体验。
此外,声音定位系统还可以用于实现多方通话,通过确定每个参与者的位置,系统可以将声音定向传输,从而减少干扰。
安全监控声音定位系统可以用于安全监控领域。
通过安装多个麦克风阵列,系统可以实时监测声音的方向和距离。
当系统检测到异常声音时,可以立即通知安全人员,以便采取相应的措施。
此外,声音定位系统还可以用于定位紧急呼叫或报警设备的位置,以便及时响应。
自动驾驶声音定位系统在自动驾驶领域也有重要的应用。
通过安装多个麦克风阵列和声音定位系统,车辆可以实时监测周围环境中的声音,并确定声源的位置。
这对于识别交通信号灯、行人或其他车辆的位置非常有帮助,从而提高自动驾驶车辆的安全性和可靠性。
未来发展趋势随着技术的不断进步,声音定位系统将会有更广泛的应用和更高的精度。
基于STM32的声音定位系统一、引言随着科技的不断进步,声音定位技术在各个领域都有着广泛的应用。
比如在军事领域,声音定位技术可以用于敌情侦察和目标定位;在消费电子领域,声音定位技术可以用于实现音频增强和环绕声效果。
本文将介绍一种基于STM32的声音定位系统,该系统可以实现对声源的方向定位,并且可以应用到智能音箱、智能家居等领域。
二、STM32介绍STM32是意法半导体公司生产的一种32位RISC处理器微控制器,具有高性能、低功耗、丰富的外设以及丰富的开发资源等特点。
STM32系列产品广泛应用于工业控制、智能家居、汽车电子等领域。
三、声音定位系统原理声音定位系统是通过测量声音在不同麦克风之间的传播时间差来确定声源的方向。
在声音定位系统中,需要使用至少3个麦克风来实现声音的定位。
1. 声音信号采集系统首先需要进行声音信号的采集。
可以通过麦克风或者MEMS麦克风芯片来采集声音信号。
在STM32中,可以通过ADC模块实现模拟信号的采集。
2. 信号处理采集到的声音信号需要进行信号处理,主要是通过测量声音在不同麦克风之间的传播时间差来确定声源的方向。
常用的算法有交叉相关函数(Cross-Correlation)和最小二乘法(Least Square Method)。
3. 方向定位通过信号处理得到的传播时间差,可以根据声音传播的速度和声音的波形来计算声源的方向。
最后可以通过串口或者无线通信模块将定位结果传输到其他设备。
四、基于STM32的声音定位系统设计基于STM32的声音定位系统主要包括硬件设计和软件设计两个方面。
1. 硬件设计硬件设计包括麦克风模块、STM32单片机、时钟模块、无线通信模块等组成部分。
麦克风模块用于采集声音信号,STM32单片机用于信号处理和方向定位,时钟模块用于进行时钟同步,无线通信模块用于传输定位结果。
2. 软件设计软件设计主要包括STM32的程序设计和定位算法设计。
STM32的程序设计包括AD采集、信号处理、通信等模块的设计。
基于STM32的声音定位系统【摘要】基于STM32的声音定位系统是一种新兴的技术,具有广泛的应用前景。
本文首先介绍了声音定位系统的背景和研究意义,明确了研究目的。
接着,详细探讨了STM32在声音定位系统中的应用以及声音定位算法原理。
然后,介绍了系统的硬件设计与实现,并进行了系统性能测试。
对系统进行了优化,并总结出了创新点。
未来,我们可以进一步探讨声音定位系统在各个领域的应用,并完善系统的功能和效率。
通过本文的研究,为声音定位技术的发展提供了重要的参考和指导。
【关键词】STM32、声音定位系统、声音定位算法、硬件设计、系统性能测试、系统优化、创新点、研究展望、结论1. 引言1.1 背景介绍声音定位是一种在智能技术领域中十分重要的技术,它可以通过对声音信号的分析和处理,确定声源的位置信息。
随着科技的发展和人工智能的应用越来越普及,声音定位系统在安防监控、智能家居、无人驾驶等领域都有着广泛的应用前景。
研究基于STM32的声音定位系统具有重要的理论意义和实际价值。
随着STM32单片机在嵌入式系统中的广泛应用,它在声音定位系统中也被广泛采用。
STM32具有低功耗、高性能、丰富的外设接口等优势,能够满足声音定位系统对实时性、稳定性和精度的要求。
基于STM32开发声音定位系统成为了当前研究的热点之一。
本文旨在探讨基于STM32的声音定位系统的设计与实现,通过对声音定位算法原理的介绍和硬件设计的讨论,结合系统性能测试和优化,使得声音定位系统能够更好地适应不同场景的需求,提高系统的性能和稳定性。
希望通过本文的研究能够为声音定位系统的发展提供一些有益的参考和借鉴。
1.2 研究意义声音定位系统是一种能够准确识别声音来源方向的智能系统,具有广泛的应用前景和重要的研究意义。
在智能家居领域,声音定位系统可以帮助用户实现声控操作,提高生活的便利性和舒适性。
在安防监控领域,声音定位系统可以帮助监控人员快速定位异常声音来源,提升安防监控的效率和准确性。
基于声学精密定位的导航研究随着科技的不断进步,我们的生活越来越方便。
从以前的“看路标”到今天的“导航”,我们的出行已经变得更加的智能化。
而这些智能化的技术背后,都离不开实现定位功能的技术。
目前市场上主流的定位技术有GPS、北斗等卫星定位系统,还有基于声学精密定位的技术(Acoustic Precise Positioning,简称APP)。
这里将重点讲述基于声学精密定位的导航研究。
一、APP原理APP是一种基于声学测距的定位技术。
它通过发射声波或者超声波,并测量声波在空气中传播所用时间来计算出声源的位置坐标。
根据波的传播原理,声速在不同介质中是不同的,因此APP 的原理正是利用声波在不同介质中传播的差异,来计算出声源的准确位置。
APP技术的基本流程如下:首先确定好参考点,可以是一个固定的物体或者一组已知坐标的设备;然后通过超声波对目标进行回声探测,获得距离信息;最后通过三角定位原理,计算出目标精确的位置坐标。
二、APP的应用多数人将声学精密定位技术和潜艇、舰船上的应用联系在一起。
然而,APP不仅可以用于海洋深部的探测,而且在工业、军事、医疗、安全、环保、农业等各个领域都有广泛的应用。
1. 工业在工业领域中,APP被用来监测设备的位置和运动轨迹。
生产线设备在运转中往往会出现各种故障,因此维护时间和维护成本都需要掌握好。
APP可以检测设备是否在正确的位置上,并记录每个设备的运动方向,从而提高生产效率和运维效率。
2.医疗在医疗领域中,APP技术应用在医院导航中的定位、导引、语音播报和红外线传送等多个渠道传递,使医生、护士和患者都能更好的了解和掌握病房和医院的信息,更加高效、准确地提供服务。
3. 安全在安全领域中,APP被用于智能家居系统,如门禁、烟雾警报器、监控器、电子锁等。
依托声音传感技术,APP可以精准地掌握门禁开启者、房屋”入侵”等情况,提高了家庭的安全性。
4. 环保在环保领域中,APP可以用于水利设施维护,如水管及阀门的维护和数值水位的监测。
可移动声源定位系统设计可移动声源定位系统是一种用于确定移动声源位置的技术,其应用领域涵盖了音乐制作、影视制作、语音识别、通信系统等多个领域。
本文将介绍可移动声源定位系统的设计原理、系统结构以及相关算法,并探讨其在实际应用中可能遇到的挑战和解决方案。
一、设计原理可移动声源定位系统的设计原理主要依赖于声音在空间中传播的特性。
当声音源发出声音时,声音会在空间中以波的形式传播,而不同位置的声音传播路径和传播时间会有所不同。
基于这一原理,可以通过对声音信号进行处理和分析,推断出声音源的位置。
在实际应用中,可移动声源定位系统通常会使用多个麦克风阵列来采集声音信号,并通过对采集到的声音信号进行时延分析、双麦克风法、波束成形等技术来确定声音源的位置。
二、系统结构可移动声源定位系统的结构主要包括信号采集模块、信号处理模块和位置推断模块三个部分。
信号采集模块通常由多个麦克风组成的麦克风阵列构成,用于采集声音信号。
这些麦克风会将采集到的声音信号传输给信号处理模块。
位置推断模块根据信号处理模块推断出的声音源位置信息,对声音源的位置进行推断和估计,并输出声音源的位置信息。
三、相关算法1. 时延分析算法时延分析算法是一种常用的声源定位算法,它通过分析不同麦克风接收到的声音信号的时延来推断出声音源的位置。
具体来说,当声音源发出声音时,不同位置的麦克风会在不同时间接收到声音信号,通过分析这些时延信息,可以确定声音源的位置。
2. 双麦克风法3. 波束成形算法四、挑战和解决方案在实际应用中,可移动声源定位系统可能会面临一些挑战,例如环境噪声干扰、多路径效应、定位精度等问题。
针对这些挑战,可以采取一些解决方案来提高可移动声源定位系统的性能。
1. 环境噪声干扰环境噪声会对声源定位系统的性能产生影响,为了降低环境噪声的干扰,可以采用自适应滤波、智能降噪等技术来提高系统的抗噪性能。
2. 多路径效应多路径效应会导致声音信号在空间中形成多条路径传播,从而影响声源定位的准确性。
声音定位方案设计引言声音是我们日常生活中重要的信息传递方式之一。
声音定位是通过利用声音波传播到不同位置的时间差和强度差,来确定声源在空间中的位置。
声音定位在许多领域中有广泛的应用,如智能音箱、无人驾驶车辆、安防监控等。
本文将介绍声音定位方案的设计思路和实施步骤,以及常见的技术方法和算法。
设计思路声音定位方案的设计需要考虑以下几个方面:1.定位算法的选择:由于声音在传播过程中会受到多种因素的影响,如噪声、反射等,因此需要选择具有良好抗干扰能力的定位算法。
2.传感器选择:常用的声音定位传感器包括麦克风阵列、声纳、超声波传感器等,根据具体应用场景选择适合的传感器。
3.信号处理和数据分析:获取到传感器采集到的声音信号后,需要经过信号处理和数据分析,提取有效的定位信息。
4.定位精度评估:对设计的声音定位方案进行实际测试,评估其定位精度和可靠性。
实施步骤声音定位方案的实施步骤如下:1.环境准备:选择适合的实验环境,要求背景噪声较小,无明显的声音反射物体。
2.传感器部署:根据定位需求和传感器特性,确定传感器的部署方式和数量,例如麦克风阵列可以采用线性、圆形或矩形布置。
3.信号采集:使用选择的传感器对环境中的声音进行采集,获取到声音信号。
4.信号处理:对采集到的声音信号进行预处理,包括滤波、去噪、增强等步骤,提高后续定位算法的准确性和稳定性。
5.定位算法:根据实际需求选择合适的定位算法,常见的算法包括互相关法、波束形成法、传播时间差法等。
6.数据分析:对经过定位算法处理后的数据进行分析,提取定位结果和相关统计信息。
7.定位精度评估:将定位结果与实际位置进行比对,评估定位方案的精度和可靠性,根据评估结果进行优化和改进。
常见技术方法和算法1. 互相关法互相关法是一种常见的声音定位算法,它利用麦克风阵列中各个麦克风之间的相互关系来估计声源位置。
该算法可以通过计算麦克风之间的互相关函数,从而确定声源在空间中的位置。
2. 波束形成法波束形成法通过调整麦克风阵列中每个麦克风的增益和相位差,使得声源信号在特定方向上形成一个较大的波束,从而提高定位的准确性和抗干扰能力。