B题 声音导引系统 (四川.西南科技大学)
- 格式:pdf
- 大小:194.99 KB
- 文档页数:7

2009全国大学生电子设计竞赛(江苏赛区)题目:B题--声音导引系统2009年9月声音导引系统(B题)摘 要:声音导引系统采用PIC16F877单片机和AT89S52做为主控制器,以自制的车体载上扬音器作为移动声源,依靠两个步进电机作动力,利用驻极体咪头及其外围电路接收并检测声音,经地面监测单片机处理后将声源距离Ox线(或O'y线)的偏差信号经无线传送给小车,经单片机控制对声源的行径路线进行精确调节,控制小车准确停在给定点上。
该系统除了完成题目所规定的基本要求外,还完成了液晶模块、无线通信的设计和调试,充分体现了检测、传感以及精确控制等技术在自动控制中的作用。
关键词:声音导引,驻极体咪头,检测声音,自动控制一、方案论证与选择1、主控芯片的确定主控芯片是整个系统的核心,通过外部采样决定整个系统的工作情况。
由于题目对通信和控制精度的要求比较高,因此主控芯片要能保证系统的稳定及达到系统的要求。
本题中需要应用两块主控芯片。
方案一:均采用89S52单片机作为主控制器。
优点:价格低廉,程序资源丰富,技术比较成熟,使用方便。
缺点:运算速度慢,程序储存空间小,数字外设少,抗干扰能力差,只有两个外部中断入口,不能实现对三个声音传感器的中断响应,且接口电路比较复杂。
方案二:均采用Microchip公司的PIC16F877A单片机。
优点:运行速度快采用RISC精简指令技术,低工作电压,低功耗,I/O口有较大的驱动能力,具有丰富的接口资源,配置了3个功能较强的多功能定时器模块,嵌入看门狗定时器,具有很强的抗干扰能力,同时还具有4个电平跳变中断输入,体积小,在线调试能力强。
缺点:价格偏高。
方案三:移动声源(即智能小车)上使用89S52单片机,地面监控部分使用Microchip公司的PIC16F877A单片机。
综合应用了两者的优点,使用89S52单片机控制小车的行径,控制简单方便;使用PIC16F877A进行数据采集并处理,并通过无线装置与89S52单片机通信,控制更为精确可靠。
编号:B甲1043声音导引系统(B题)学校:山东大学参赛队员:刘树林赵洋孙建凯指导老师:陈言俊秦峰王延伟文稿辅导老师:陈言俊声音导引系统(B题)摘要:本文介绍以AT89S52单片机为核心的智能声音导引小车系统,整个系统使用两片AT89S52单片机实现移动声源与三个基站的无线通讯。
电机驱动部分采用NEC公司生产的MMC-1驱动芯片级联L298构成。
声源部分采用无源蜂鸣器发出频率为16KHz的声音,三个基站分别安装压电陶瓷片检测蜂鸣器发出的声音,并将检测到得数据通过无线数传模块A7105传送到移动声源上的主控单片机。
主控单片机据此调整小车的运行。
实现声音导航。
ABSTRACT:This article introduces the AT89S52microcontroller as the core of the Smart Sound Guided Vehicle System,the entire system uses two AT89S52MCU moving sound source and the three base stations in wireless communication. Motor-driven part of the adoption of NEC's production of MMC-1cascade L298driver chip composition.Buzzer sound source part of the passive voice to issue a frequency of16KHz,three base stations were installed electrets detected buzzer sounds,and was detected in the data transmitted through the wireless module to the moving sound source master microcontroller.Host microcontroller to adjust the operation of car.To achieve voice guided navigation关键词:声音导航,无线通讯,NECK eywords:Voice guided navigation,wireless communication,NEC1.总体模块方案的论证与比较1.1主控部分的选择与论证方案(一):声源的主控核心采用AT89S52单片机,分别安装在移动声源部分和基站接收部分。
西南科技大学试题(B卷)参考答案课程名称:《光电子技术》课程代码:1695命题人:命题组学院:理学院专业班级:光信息科学与技术2004级学号:共3页第页一、选择题(10分,2分/题)1、电磁波具有的性质有(A、B、C、D)A. 电场、磁场和波的传播方向满足右手定则B. 具有偏振C. 电场和磁场相位同步D. 电场与磁场存在相互依存关系2、图像通信系统主要由图像输入设备、(A、B、C、D)等组成。
A. 编码器B. 调制器C. 信道D. 显示终端3、在光线作用下,半导体的电导率增加的现象属于( D )A. 外光电效应B. 内光电效应C. 光电发射D. 光导效应4、厨房宜采用哪种形式的火灾报警探测器( C)A. 感温探测器B. 火焰探测器C. 感烟探测器D. 离子感烟探测器5、成像转换过程需要研究的有(A、B、C、D)A. 能量B. 成像特性C. 噪声D. 信息传递速率二、判断题(10分,2分/题)6、大气分子在光波电场的作用下产生极化,并以入射光的频率作受迫振动。
(√)7、某些晶体在外加电场的作用下,其折射率将发生变化,当光波通过此介质时,其传输特性就受到影响而改变,这种现象称为电光效应。
(√)8、光电池是利用光生伏特效应,直接将光能转换为电能的光电器件。
(√)9、热辐射光纤温度探测器是利用光纤内产生的热辐射来探测温度的一种器件。
(√)10、等离子体显示器缺点是每一个像素都是一个独立的发光管。
(√)三、填空题(10分,2分/题)11、处于空腔单位体积内,频率位于ν附近单位频率间隔的光波模式数为 3c 28πυ12、若超声频率为f s ,那么光栅出现和消失的次数则为2 f s ,因而光波通过该介质后所得到的调制光的调制频率将为声频率的 2 倍。
13、微光光电成像系统的核心部分是 微光像增强器件 。
14、 向列型 液晶由长径比很大的棒状分子组成,保持与轴向平行的排列状态。
15、光电二极管按结构分有 同质结与异质结光电二极管 。
声音引导系统(B题)摘要:为了满足声音引导系统的设计要求,进行了各单元电路方案的比较论证及确定,系统以凌阳16位单片机SPCE061A作为电动车的控制核心,控制小车运动。
采用MMC-1为电机驱动芯片,用AT89S52单片机控制接收器模块。
选用无线收发模块将S52单片机的处理数据传回SPCE061A单片机。
对于关键的小车动力部分,经过充分比较、论证,最终选用了价格便宜,性能稳定的直流电机。
以声音信号的发送和无线传送设备实现小车的运动过程。
光电指示模块通过发光二极管和凌阳语音系统来指示下车,是否到达指定位置。
最后的实验表明,系统完全达到了设计要求。
关键词:Abstract:Key word:1.系统方案:1.1 实现方法本题要求设计并制作一移动声源(小车),能实现小车发出声音后开始运动到达指定位置OX后停止,同时运动过程中的平均速度大于5cm/s。
到达指定位置OX线之间的定位误差小于3cm/s。
并且小车运动过程中不能超过OX线左侧5cm/s。
到达后有明显的光声指示。
上述各模块的方案论证如下:1.2 方案论证1.2.1 小车控制器模块方案一:采用ATMEL 公司的AT89S52。
51单片机价格便宜,应用广泛,但是功能单一,系统需要增加语音功能,还需外接语音芯片,实现较为复杂;另外51 单片机需要仿真器来实现软硬件调试,较为烦琐。
方案二:采用凌阳公司的SPCE061A 单片机作为控制器的方案。
该单片机I/O 资源丰富,并集成了语音功能。
芯片内置JTAG电路,可在线仿真调试,大大简化了系统开发调试的复杂度。
根据本题的要求,我们选择第二种方案。
1.2.2 声音接收器控制模块方案一:采用凌阳公司的SPCE061A 单片机作为控制器的方案。
单片机自带强大的语音,和在线仿真。
但价格昂贵,系统复杂,难于控制。
方案二:用ATMEL 公司的AT89S52,51单片机功能不够强大,但对与本体要求可以实现,同时价格低,技术成熟,性能稳定。
声音导引系统中文摘要:本系统为实现以声音引导小车按预定方案运行而设计。
系统采用51最小系统板作为此系统的检测核心和控制核心,通过对声音信号的检测,准确实现小车坐标定位,并通过无线发射接收模块将坐标信息传送至车载MCU,实现小车的声音引导控制。
小车无线传输模块采用集成nrf24l01模块,以期实现坐标信息实时无线传输。
电机驱动、控制模块采用ASSP芯片以及分离MOS管H桥电路使电机的控制精确、稳定。
声音检测模块则采用多级放大滤波电路接收三路声音信号准确检测,并将此信号传送至地面控制MCU进行坐标定位。
1 系统方案设计1.1 AT89S52系列单片机系统方案采用两块AT89S52单片机系统,车载单片机实现声音信号的发送,无线信号的接受,以及电机驱动芯片的控制。
陆基单片机完成三路声音信号捕获,处理并将小车坐标信息通过无线发射。
系统编程容易,性价比高。
1.2 MSP430单片机系统方案采用MSP430单片机系统作为控制的核心,来实现智能小车无线传输、声音处理、电机驱动等功能。
1.3系统方案比较AT89S52系列单片机系统方案价格低廉,技术比较成熟,使用简单,应用广泛,而且能较好的实现系统的要求。
MSP430系统方案功耗虽然较低,但编程比较复杂,价格昂贵,因而,决定采用该方案1。
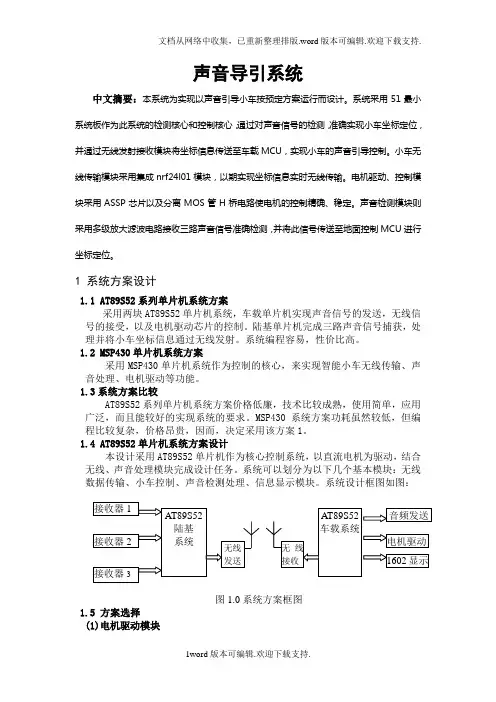
1.4 AT89S52单片机系统方案设计本设计采用AT89S52单片机作为核心控制系统,以直流电机为驱动,结合无线、声音处理模块完成设计任务。
系统可以划分为以下几个基本模块:无线数据传输、小车控制、声音检测处理、信息显示模块。
系统设计框图如图:图1.0系统方案框图1.5 方案选择(1)电机驱动模块方案一:采用两个步进电机,步进电机的准确定长步进性能方便的实现调速和转向,步进电机的输出力距较低,价格较高,而且步进电机的编程复杂,硬件连接的工作量大。
方案二:利用一个直流减速电机,具有转矩大,驱动力大,控制简单等特点。
经比较验证,显然方案一电机的机械结构难以满足题目的要求,而方案二利用直流电机完全能满足要求。
声音导引系统(B题)摘要:系统采用两片STC89C52单片机分别作为主从控制器,电动小车搭载蜂鸣器构成可移动声源,声音信号被驻极体话筒感知后再加以后续放大、滤波,构成声音检测模块。
从机控制声源发声,主机接收到声音信号后经无线通信向其发出距离误差信号,从机对该信号进行处理,采用差值控制法控制电动小车运动,从而实现对声源的导引功能。
经测试,系统运行时,声源最大平均速度能达到12.8cm/s,最小定位误差小于1.0cm。
当声源以平均速度大于10cm/s速度运行时,任意时刻不会超过直线Ox左侧2cm。
此外,系统还加入了液晶显示、语音提示等人机交互界面。
关键词:STC89C52 声音检测差值控制法声音导引目录1.系统设计 (4)1.1设计任务与要求 (4)1.2设计分析 (4)1.3各模块方案论证和选择 (4)1.3.1运动平台的选择 (4)1.3.2控制器模块 (4)1.3.3电机驱动模块 (4)1.3.4 发声模块 (4)1.3.5 声音接收模块 (5)1.3.6 无线通信模块 (5)1.3.7 速度检测模块 (5)1.3.8 数据显示模块 (5)1.3.9 声光提示模块 (5)1.4小结 (5)2.系统的硬件实现 (6)2.1电机驱动电路 (6)2.2发声模块电路 (6)2.3声音接收电路 (6)2.4速度检测电路 (6)2.5无线通信电路 (7)3 理论分析与计算 (7)3.1控制策略分析 (7)3.2控制理论计算 (7)4.系统的软件设计 (8)4.1主程序 (8)4.2距离测量子程序 (8)4.3无线通信子程序 (8)4.4电机驱动子程序 (8)5. 系统测试 (8)5.1测试仪器 (8)5.2系统整体测试数据 (8)5.2.1基本部分测试 (8)5.2.2发挥部分测试 (9)5.3系统整体测试结果分析 (9)6 结论 (9)参考文献: (10)附录一:使用说明 (11)附录二:元器件清单 (12)附录三:电路原理图及印制版图 (13)附录四:程序流程图 (19)附录五:程序清单 (24)1.系统方案设计及论证1.1设计任务与要求设计要求与任务详见2009全国大学生电子设计大赛试题(B 题)。
声音导引系统的设计与总结报告摘要:本系统用小车做可移动声源载体,以STC12C5A60S2单片机和FPGA为控制核心,电路由电源、电机驱动、无线通信、声音传送、车速检测等模块构成。
移动声源间断发出DTMF信号,各接收器将收到的信号解码后送入单片机和FPGA综合分析处理,将结果通过NRF2401无线集成通信电路传送给声源,引导小车运动。
采用光电传感器SG-2BC测速,提高了控制精度;该系统的特色在于采用MT8880产生DTMF信号并用MT8870解码,降低了环境噪声的影响,提高了距离测量的精确度和性价比。
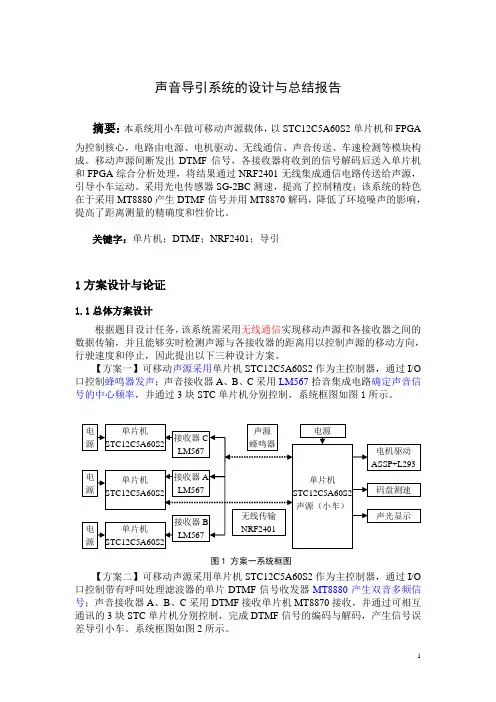
关键字:单片机;DTMF;NRF2401;导引1方案设计与论证1.1总体方案设计根据题目设计任务,该系统需采用无线通信实现移动声源和各接收器之间的数据传输,并且能够实时检测声源与各接收器的距离用以控制声源的移动方向,行驶速度和停止,因此提出以下三种设计方案。
【方案一】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制蜂鸣器发声;声音接收器A、B、C采用LM567拾音集成电路确定声音信号的中心频率,并通过3块STC单片机分别控制,系统框图如图1所示。
图1 方案一系统框图【方案二】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制带有呼叫处理滤波器的单片DTMF信号收发器MT8880产生双音多频信号;声音接收器A、B、C采用DTMF接收单片机MT8870接收,并通过可相互通讯的3块STC单片机分别控制,完成DTMF信号的编码与解码,产生信号误差导引小车。
系统框图如图2所示。
图2 方案二系统框图【方案三】可移动声源采用单片机STC12C5A60S2作为主控制器,通过I/O 口控制带有呼叫处理滤波器的单片DTMF信号收发器MT8880产生双音多频信号;声音接收器A、B、C采用MT8870信号收发器电路,各声音接收器用有线连接并通过FPGA和STC单片机组成的小系统统一控制,完成DTMF信号的编码与解码,产生信号误差导引小车。
基于STM32控制的声音导引系统摘要:设计了一个基于STM32控制的声音导引系统。
该系统由1个可移动声源S和3个声音接收器A、B、C构成。
由一片从控STM32单片机控制无线发送模块,实现声音导引信号的发送。
主控单片机根据无线接收模块所接收到的信息来判断可移动声源运动的启停。
关键词:无线收发模块;STM32单片机;声音导引;移动声源引言声音导引系统,主要是靠声音来完成对机器的智能控制,既方便又快捷。
尤其是环境比较恶劣、不适合人类停留的地方,可以依靠声音来控制机器的正常运行。
声音导引系统也是智能化控制的一个方面,对未来的智能化发展有较大的促进作用,对未来智能机器人的研究也大有帮助。
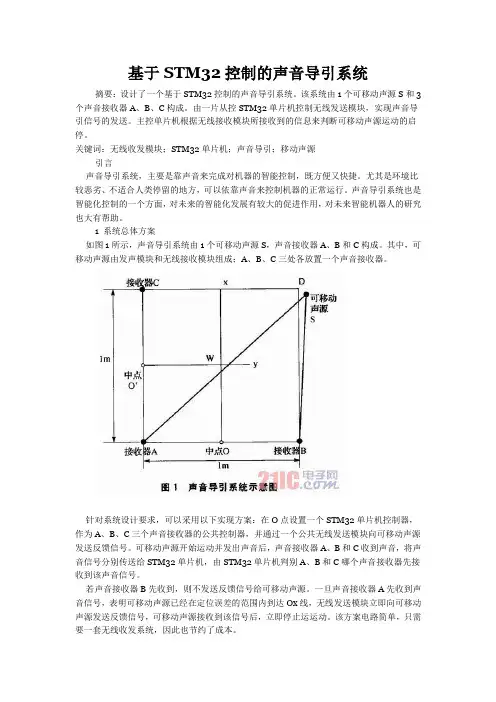
1 系统总体方案如图1所示,声音导引系统由1个可移动声源S,声音接收器A、B和C构成。
其中,可移动声源由发声模块和无线接收模块组成;A、B、C三处各放置一个声音接收器。
针对系统设计要求,可以采用以下实现方案:在O点设置一个STM32单片机控制器,作为A、B、C三个声音接收器的公共控制器,并通过一个公共无线发送模块向可移动声源发送反馈信号。
可移动声源开始运动并发出声音后,声音接收器A、B和C收到声音,将声音信号分别传送给STM32单片机,由STM32单片机判别A、B和C哪个声音接收器先接收到该声音信号。
若声音接收器B先收到,则不发送反馈信号给可移动声源。
一旦声音接收器A先收到声音信号,表明可移动声源已经在定位误差的范围内到达Ox线,无线发送模块立即向可移动声源发送反馈信号,可移动声源接收到该信号后,立即停止运运动。
该方案电路简单,只需要一套无线收发系统,因此也节约了成本。
2 系统硬件设计本系统中,可移动声源由EDC-CarX V1.0-2007.06四驱版DIY竞赛小车、日本NEC 电机控制ASSP芯片MMC-1、STM32 Cortex-M3系列单片机、无线接收模块、天线、蜂鸣器组成;音频接收模块、无线发送模块、天线组成声音接收器。
2009全国大学生电子设计竞赛设计报告题目:声音导引系统二○○九年九月六日目录目录1系统方案 (1)1.1系统整体方案 (1)1.2移动声源控制方案 (2)1.3系统控制器方案 (2)1.4无线收发方案 (2)1.5音频收发定位方案 (3)1.6移动声源选择方案 (3)1.6.1 车体选择 (3)1.6.2 电机控制方案选择 (3)1.6.3 电源选择方案 (3)2设计与论证 (3)2.1音频信号的发射和接收设计 (3)2.2PID算法设计 (5)2.3无线发送设计 (6)3系统软件设计 (7)3.1移动声源端软件设计 (7)3.2音频接收处理端软件设计 (7)4系统测试 (8)5总结 (8)参考文献 (8)附录 (9)声音导引系统摘要:本设计是基于LM3S1138为主控制器的声音导引系统。
设计采用两片EasyARM1138单片机作为核心器件,辅以移动声源、音频收发定位、无线收发模块、液晶显示、键盘控制、电源等单元模块,以实现对可移动声源的运动控制。
移动声源产生音频信号,音频接收模块接收音频信号后,对所接收的音频信号进行处理,并通过另外一片EasyARM1138单片机得到移动声源的坐标。
应用无线收发模块将处理后的坐标数据发送到移动声源上的EasyARM1138控制器。
EasyARM1138控制器通过PID算法控制改变移动声源的前进速度以及转角方向,从而控制移动声源的行进。
移动声源将整个行程的平均速度和移动位移通过显示模块显示出来。
关键词:移动声源,声音定位,无线射频通信,PID算法Abstract: This design is based on the LM3S1138 controller-based voice guidance system. Design uses EasyARM1138 microcontroller as the core device, supplemented by moving sound source (Applied Motor Control ASSP chip (Model MMC-1)-controlled car), audio transceiver positioning, wireless transceiver, LCD, keyboard control, power and other units to achieve pairs of movable sound source motion control. Moving sound source audio signal occurs, audio transceiver positioning unit receives the audio signal, processing and get the coordinates of moving sound source. Application of wireless transceiver modules will be processed the data sent to the mobile sound source controller side, moving the sound source controller PID algorithm for control of the road moving sound source, and the average speed throughout the trip and mobile displacement through the display unit display. In addition, the system can detect the specific environment of temperature, humidity and light intensity, so that the whole system multi-functionality. Based on system stability, intelligence, the system can work in without any working environment.Keywords: LM3S1138 ASSP chip (Model MMC-1) Audio PID algorithm for sending and receiving location1系统方案1.1系统整体方案本系统采用电动小车作为移动的声源,以单片机作为声音导引系统的检测和控制核心。
声音导引智能系统蔡卫刚【摘要】设计采用MSP430单片机作为核心器件的声音导引智能系统,可以实现对电机控制、ASSP芯片以及显示模块、语音收发、无线收发模块的控制,应用多通道两相四线式步进电机/直流电机控制芯片ASSP芯片,实现对可移动声源的运动控制,系统通过语音收发模块实现可移动声源的定位,并通过无线收发模块进行对可移动声源的运动控制.同时应用ZX240128M1液晶显示,可以显示过程的测量响应时间、可移动声源的起始位置到OX线的垂直距离及平均速度.整个系统具有人性化,智能化等优点.%The design uses MSP430 microcontroller as the core device of the voice guidance system,ASSP chip and display control module,voice transceiver,a wireless transceiver module,the multi-channel phase four wire type stepping motor / DC motor control chip ASSP,the realization of the mobile sound source movement control,system positioning mobile sound source through voice transceiver module,and carry on the motion controlof mobile source through the wireless transceiver module.At the same time,application of ZX240128M1 liquid crystal display,can display the vertical distance measuring response time,the mobile sound source starting position to the OX line and the average speed of process.The whole system has the advantages of humanization,intelligent etc.【期刊名称】《电子设计工程》【年(卷),期】2013(021)014【总页数】3页(P168-170)【关键词】MSP430;ASSP芯片;无线收发模块【作者】蔡卫刚【作者单位】西安航空职业技术学院电子工程学院,陕西西安710089【正文语种】中文【中图分类】TN13人工智能目前在计算机领域内,得到了愈加广泛的重视。
声音导引系统(B题)摘要:本文描述了声音导引系统的设计原理和实现方法。
该系统由AT89S52单片机控制,通过NEC公司的ASSP电机控制芯片和单片机之间的串行通信实现可移动声源的运动。
主控制器利用不同声音接收器间产生的误差信号,并用无线通信方式将此误差信号传输至可移动声源,引导其运动。
系统最大特点在于软件设计采用层次化、模块化的设计方法,使得复杂数学模型和控制算法得以简化和快速开发。
经调试和测试,系统各项性能参数已基本达到设计指标。
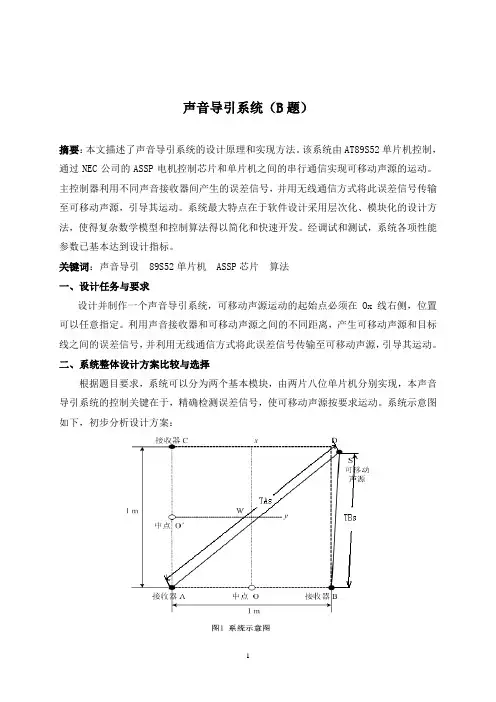
关键词:声音导引 89S52单片机 ASSP芯片算法一、设计任务与要求设计并制作一个声音导引系统,可移动声源运动的起始点必须在Ox线右侧,位置可以任意指定。
利用声音接收器和可移动声源之间的不同距离,产生可移动声源和目标线之间的误差信号,并利用无线通信方式将此误差信号传输至可移动声源,引导其运动。
二、系统整体设计方案比较与选择根据题目要求,系统可以分为两个基本模块,由两片八位单片机分别实现,本声音导引系统的控制关键在于,精确检测误差信号,使可移动声源按要求运动。
系统示意图如下,初步分析设计方案:方案一、在可移动声源向Ox线逼近时,把接收器A和B接收到声源的声音的强弱分别转换成它们与声源之间的距离,从而判断声源是否到达目的地。
方案二、启用单片机定时器,根据接收器A和B接收到声音的时间差来判断声源的位置,进而调节电机运行的速度,直至声源是否到达目的地。
方案分析:鉴于方案一中声音的强弱受外界干扰太大,检测到的声音信号不定,而测量时间差则相对精确,所以本系统采用方案二。
三、设计与论证1、电机运行速度设计根据题目要求,可移动声源发出声音后开始运动,到达Ox线并停止。
要求平均速度大于 5cm/s。
如上图1所示,鉴于此要求,可以采用霍尔传感器直接测出电机的转速,并将此速度反馈给辅控制单片机,由此来调节占空比,进而调节电机的转速。
但由于比赛时间有限,此方案并未落实。
2、误差信号的产生声源发出声音并移动,辅助控制器控制A、B接收器同时启动,利用A、B接收器接收到声音的时间差来判断声源与Ox线之间的误差,若时间差大于零则说明声源与Ox线之间有误差,声源继续移动,直到时间差为零时停止。
声音导引系统(B题)摘要:声音导引系统由声音收发装置及信号处理控制两部分组成。
发送由接受由控制关键字:目录一系统设计1 设计任务与要求设计并制作一声音导引系统。
1.基本要求(1)制作可移动的声源。
可移动声源产生的信号为周期性音频脉冲信号,如图2所示,声音信号频率不限,脉冲周期不限。
图2 信号波形示意图(2)可移动声源发出声音后开始运动,到达Ox 线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于 5cm/s 。
(3)可移动声源停止后的位置与Ox 线之间的距离为定位误差,定位误差小于3cm 。
(4)可移动声源在运动过程中任意时刻超过Ox 线左侧的距离小于5cm 。
(5)可移动声源到达Ox 线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
2系统设计方案论证与比较方案一: 方案二:三 单元电路设计3.13.2单元电路设计3.2.1音调译码器集成电路设计音调集成电路由LM567构成。
LM567为带宽可调,抗干扰能力强,中心频率稳定的音调译码器。
LM567的工作过程概述如下:当LM567的3脚输入幅度≥25mV、频率在其带宽内的信号时,8脚由高电平变成低电平,2脚输出经频率/电压变换的调制信号;如果在器件的2脚输入音频信号,则在5脚输出受2脚输入调制信号调制的调频方波信号。
在图1的电路中仅利可移动声源的起始位置到Ox 线的垂直距离响应时间平均速度=用了LM567接收到相同频率的载波信号后8脚电压由高变低这一特性,就可以形成对控制对象的控制其5、6脚外接的电阻和电容决定了内部压控振荡器的中心频率0f ,01111.1f R C ≅。
过滤器的带宽为:BW =,其中,i V 为输入电压, 200i V m V ≤;2C 为2引脚上接的电容。
图1音调译码器集成电路设计3.2.2 整形电路设计整形电路采用滞会比较电路,采用MAXIM 公司生产的双组高速电压比较器MAX912 。
编号:01 2009全国大学生电子设计竞赛题目B:《声音导引系统》参赛学生:吴飞、王理、徐全指导教师:王文杰、严石、李亚舟学校:淮阴工学院院系:电子与电气工程学院目录1方案设计与论证 (2)1.1主控系统选择 (3)1.2电机选择 (3)1.3电机控制系统选择 (3)1.4无线数据通信模块选择 (3)1.5声音信号处理方案选择 (3)2电路设计 (3)2.1系统组成 (4)2.2音频发射 (4)2.3音频处理 (4)2.4电机控制系统 (5)3软件设计 (5)4系统测试 (6)4.1测试仪器 (6)4.2测试方法 (6)4.3测试数据 (7)4.4误差分析 (7)5设计总结 (7)6参考文献 (7)7 附录 (8)附1:部分元器件清单 (8)附2:仪器设备清单 (8)附3:部分程序清单 (8)声音导引系统设计与总结报告淮阴工学院电子与电气工程学院参赛队员:吴飞王理徐全指导教师:王文杰严石文稿整理指导老师李亚舟摘要:本系统采用两片STC12C5A60S2增强型51单片机,双直流电机双轮驱动小车。
通过接收点收到声音信号时间不同,判断小车离各个接收站的距离远近,通过无线传输模块控制车载单片机,进而控制小车运动,到达目的地,发出声光信号。
本系统在设计中注意低功耗处理和力求高性价比等细节。
本设计主要特点:1. 高效的L293电机驱动电路,提高电源利用率。
2.双电源设计,控制电路电源与电机电源隔离,信号通过光耦传输。
3.采用测时间差的方式,通过3点声音信号实现精确定位。
关键词: 声音导引可移动声源声音接收器单片机智能车AbstractT his system use two STC12C5A60S2 enhanced 51-series microcomputer, double dc motor drive car outfit. Through different voice signal method-the peak-trough received from various terminal, the car of distance, through wireless transmission module control vehicle, and control chip car movement, destination, a sound signal. This system in the design of low power consumption and high performance to such details.1.方案设计与论证1.1主控系统选择方案一:采用高性能嵌入式系统,比如ARM。
声音导引系统(B题)摘要:采用STC12C32S2单片机作为声音引导系统的核心,使用STC单片机作为可移动声源的控制器。
以1W小喇叭作为声源在发出10-10kHz连续可调、10mS-10S连续可调的周期性声频脉冲信号。
该声源由MMC-1型ASSP芯片驱动下的直流电机可以在赛场内任意运动。
声音由麦克风接收,并根据智能滤波和声频脉冲信号辨识算法从环境噪声中提取声频脉冲信号,由此计算出可移动声源在赛场中的位置。
采用饱和PD 控制算法控制可移动声源接近中线OX和中点W,并用无线通讯模块将运动命令传送给可移动声源的位移量。
检测表明:该系统可达到竞赛基本和发挥部分的要求。
关键词:声音导引,STC12C32S2单片机, MMC-1型ASSP芯片,智能滤波,声频脉冲信号辨识Abstract:Using a singlechip STC12C32S2 as the core of the sound guidance system and another singlechip xxx as the controller of movable sound source. Driven by Speaker, Taking STC as the sound source to give a 10-10kHz and 10mS-10S continuous tunable periodic audio pulse signal. The D.C machine is driven by the ASSP MMC-1 chip. And the sound source can be random movement in the racing field. The sound is received by the microphone .According to the intelligent filtering and audio pulse signal identification algorithm, the audio pulse signal can be collected from the environment noise. And then figuring out the location of the movable sound source in the racing field. Adopting the saturation PD control algorithm which can move the movable sound source close to the midline and the mid-point. Moreover, using the wireless communication module to send the movement commonds to the displacement of the movable sound source. Testing shows that the system can achieve the requirements of the basic and creative parts in the contest. Keywords: sound guidance, singlechip STC12C32S2, ASSP MMC-1, intelligent filtering, audio pulse signal identification1一、方案论证与比较1.系统基本方案本系统主要由主控电路板、可移动声源电路板、声音传感器、直流电机等部分组成,主控电路板由STC12C5A32S2单片机、声音信号调理电路、显示器、无线通讯发生器和电源等组成部分;可移动声源电路板包括STC89C58单片机、ASSP驱动芯片、无线通讯接收器、声频脉冲源和电源等部分,系统框图如图1所示。
历届全国大学生电子设计竞赛试题第一届(1994年)全国大学生电子设计竞赛题目(1)简易数控直流电源(A题)(2)多路数据采集系统(B题)第二届(1995年)全国大学生电子设计竞赛题目(1)实用低频功率放大器(A题)(2)实用信号源的设计和制作(B题)(3)简易无线电遥控系统(C题)(4)简易电阻、电容和电感测试仪(D题)第三届(1997年)全国大学生电子设计竞赛题目(1)直流稳压电源(A题)(2)简易数字频率计(B题)(3)水温控制系统(C题)(4)调幅扩播收音机(D题)第四届(1999年)全国大学生电子设计竞赛题目(1)测量放大器设计(A题)(2)数字式工频有效值多用表(B题)(3)频率特性测量仪设计(C题)(4)短波调频接收机设计(D题)(5)数字化语音存储与回放系统(E题)第五届(2001年)全国大学生电子设计竞赛题目(1)波形发生器(A题)(2)简易数字存储示波器(B题)(3)自动往返电动小汽车(C题)(4)高效率音频功率放大器(D题)(5)数据采集与传输系统(E题)(6)调频收音机(F题)第六届(2003年)全国大学生电子设计竞赛题目(1)电压控制LC振荡器(A题)(2)宽带放大器(B题)(3)低频数字式相位测量仪(C题)(4)简易逻辑分析仪(D题)(5)简易智能电动车(E题)(6)液体点滴速度监控装置(F题)第七届(2005年)全国大学生电子设计竞赛题目(1)正弦信号发生器(A题)(2)集成运放测试仪(B题)(3)简易频谱分析仪(C题)(4)单工无线呼叫系统(D题)(5)悬挂运动控制系统(E题)(6)数控恒流源(F题)(7)三相正弦波变频电源(G题)第八届(2007年)全国大学生电子设计竞赛题目(1)音频信号分析仪(八)【本科组】(2)无线识别(B)【本科组】(3)数字示波器(C)【本科组】(4)程控滤波器(D)【本科组】(5)开关稳压电源(E)【本科组】(6)电动车跷跷板(F)【本科组】(7)积分式直流数字电压表(G)【高职高专组】(8)信号发生器(三)【高职高专组】(9)可控放大器(D【高职高专组】(10)电动车跷跷板(J)【高职高专组】第九届(2009年)全国大学生电子设计竞赛题目(1)光伏并网发电模拟装置(A题)【本科组】(2)声音导引系统(B题)【本科组】(3)宽带直流放大器(C题)【本科组】(4)无线环境监测模拟装置(D题)【本科组】(5)电能收集充电㈱(E题)【本科组】(6)数字幅频均衡的功率放大器(F题)【本科组】(7)低频功率放大器(G题【高职高专组D(8)LED点阵书写显示屏(H题【高职高专组D (9)模拟路灯控制系统Q题【高职高专组】)。
声音导引系统(B题)摘要:本设计以Atmega128单片机为控制核心,STC89C52RC为辅助控制器,电动车为执行器件,实现声音引导电动车精确定位的功能。
系统采用NEC电子电机控制ASSP 芯片(型号MMC-1),控制直流电机的运行,可实现256档调速。
小车平均速度达14cm/s。
采用斜率补偿法,实际最小定位误差为0.6cm。
采用nRF905无线模块实现小车与主控制器之间的通讯;采用RT12864液晶和ZLG7290键盘模块做为人机界面;采用MP3语音模块,提供优质的语音提示。
关键词:声音导引智能电动车无线收发定位目录1系统方案 (1)1.1总体设计方案 (1)1.1.1整体方案比较 (1)1.2设计与论证 (2)1.2.1定位方案的设计 (2)1.2.2误差信号产生及控制算法分析 (2)2单元电路设计 (3)2.1系统组成 (3)2.2控制器电路设计 (3)2.3音频接收电路设计 (3)2.4 nRF905无线模块电路设计 (4)2.5电机驱动电路设计 (4)2.6 SK-SDMP3语音模块电路设计 (4)2.7 其他硬件模块介绍 (4)3.软件设计 (4)3.1开发软件介绍 (4)3.2系统程序设计 (5)3.2.1主机系统主程序 (5)3.2.2从机系统主程序 (5)3.2.3其他子程序 (5)4.系统测试 (5)4.1测试使用的仪器及设备 (5)4.2指标测试和测试结果 (5)4.3 测试结果分析 (6)5.结论 (7)参考文献 (7)附录1图2.2.1 (7)附录2图2.5.1 (8)附录3图2.6.1 (10)附录4图2.7.1 (12)附录5表4.1.1 (13)附录6图4.2.1 (14)附录7表4.2.2 (14)附录8表4.2.4 (14)附录9表4.2.5 (15)附录10图4.2.1 (15)附录10主要元件清单 (16)附录10程序清单 (16)1系统方案1.1总体设计方案本系统设计要求实现三个位置不同的声音接收器引导一个可移动声源精确定位,设计要素有声音接收器、测距方案、以及定位算法。
2012 年“ TI ”杯辽宁省电子设计比赛声音定位系统( D题)学校:参赛队员:目录1概括 .....................................................................................................................错误 !未指定书签。
1.1 主要任务 .........................................................................................................错误 !未指定书签。
1.2 设计要求 .........................................................................................................错误 !未指定书签。
基本要求 ..................................................................................................错误 !未指定书签。
发挥部分 ..................................................................................................错误 !未指定书签。
2方案设计与论证 .................................................................................................错误 !未指定书签。
2.1 方案对照 .........................................................................................................错误 !未指定书签。