基于单片机的声音引导跟踪系统
- 格式:doc
- 大小:489.50 KB
- 文档页数:45
基于单片机的声音定位系统的设计【摘要】声音定位技术利用声学与电子装备,接收声波来确定声响模块具体位置的一种技术,它是一种重要的军事侦察手段,同时在其他方面也有广泛的应用。
本系统采用低功耗MSP430单片机作为控制器,控制整个声音定位系统的协调工作,在一块平板上贴一张坐标纸,在其四角外侧分别固定安装一个声音接收模块,通过驻极体话筒检测音频信号,然后声音接收模块将声音信号传送至信息处理模块,判定声响模块所在的位置的X、Y坐标,并以数字形式在液晶上显示X、Y坐标值。
【关键词】低功耗MSP430单片机;声音定位;声音接收模块;声响模块1.声音定位系统发展现状声音定位在人的日常生活中着重要意义。
例如,当你独自行走时,突然听到一个响声.你会想到这个声音什么意思,对你有无威胁,它来自何方等等。
确定声音的方向和距离需要比较来自两耳信息,然后做出对比判断和反应。
声音定位技术利用声学与电子装备接收声波来确定声响模块具体位置的一种技术,它是一种重要的军事侦察手段,产生于第一次世界大战。
开始根据火炮发出的声音测定火炮位置。
其系统有多个声测哨站与声测中心组成,两者用电缆连接。
声测哨站根据传感器接受信号,声测中心记录信号并根据同一信号到达不同传感器的时间差计算火炮位置。
声音定位在战场之外也同样具有广泛的应用前景。
它可用于电话会议系统、视频会议系统、可视电话等系统中的控制摄像头和传声器阵列波速方向对准正在说话的人;也可用于语音及说话人识别软件的前端预处理,以提供高质量的声音信号,提高语音及说话人识别软件的识别率;亦可用于强噪声环境下的声音获取、大型场所的会议记录,以提高声音拾取质量;还可用于助听装置中,更好地为耳障患者服务等。
2.本系统的功能本声音定位系统,在一块不大于1m2的平板上贴一张500mm×350mm的坐标纸,在其四角外侧分别固定安装一个声音接收模块,声音接收模块通过导线将声音信号传输到信息处理模块,声音定位系统根据声响模块通过空气传播到各声音接收模块的声音信号,判定声响模块所在的位置坐标。
基于单片机的录音系统设计一、引言二、系统总体设计(一)系统功能需求本录音系统需要实现以下功能:1、音频采集:能够实时采集外部声音信号,并将其转换为数字信号。
2、数据存储:能够将采集到的音频数据存储在外部存储器中,如闪存或 SD 卡。
3、音频播放:能够将存储的音频数据还原为声音信号,并通过扬声器或耳机播放出来。
4、控制功能:能够通过按键或其他输入设备对录音、播放、暂停、停止等操作进行控制。
(二)系统总体结构基于上述功能需求,本录音系统主要由以下几个部分组成:1、音频采集模块:负责将外部声音信号转换为电信号,并进行放大和滤波处理。
2、模数转换模块(ADC):将模拟电信号转换为数字信号,以便单片机进行处理。
3、单片机控制模块:作为系统的核心,负责对整个系统进行控制和数据处理。
4、数据存储模块:用于存储采集到的音频数据。
5、音频播放模块:将存储的数字音频数据转换为模拟信号,并通过扬声器或耳机播放出来。
6、电源模块:为整个系统提供稳定的电源供应。
三、硬件设计(一)音频采集模块音频采集模块通常由麦克风、放大器和滤波器组成。
麦克风将声音信号转换为电信号,放大器对电信号进行放大,以提高信号的强度,滤波器则用于去除噪声和干扰信号,提高信号的质量。
(二)模数转换模块(ADC)ADC 模块的作用是将模拟电信号转换为数字信号。
在选择 ADC 芯片时,需要考虑其分辨率、采样率、转换精度等参数。
常见的 ADC 芯片有 ADC0809、ADS7822 等。
(三)单片机控制模块单片机是整个系统的控制核心,负责对音频采集、模数转换、数据存储和音频播放等模块进行控制和数据处理。
在本设计中,我们选用了 STM32 系列单片机,其具有丰富的外设资源和较高的处理性能,能够满足系统的需求。
(四)数据存储模块数据存储模块用于存储采集到的音频数据。
常见的存储介质有闪存、SD 卡等。
在本设计中,我们选用了 SD 卡作为存储介质,通过 SPI 接口与单片机进行通信。
基于STM32的声音定位系统引言声音定位技术是近年来备受关注的一项技术,它可以通过声音信号的接收和处理,确定声源的位置。
这项技术在军事、安防、医疗等领域均有着广泛的应用,而随着技术的发展,声音定位系统也逐渐向普通民用领域渗透。
为了满足市场对于声音定位系统的需求,一些厂家推出了基于STM32的声音定位系统。
本文将介绍基于STM32的声音定位系统的设计及实现方法。
一、声音定位系统的工作原理声音定位系统是通过多个麦克风阵列收集声音信号,并利用算法处理声音信号,从而确定声源的位置。
通常,声音定位系统包括声音采集模块、数字信号处理模块和控制模块。
声音采集模块:声音采集模块采用多个麦克风构成的麦克风阵列,用于接收来自不同方向的声音信号。
多个麦克风可以接收到同一声源的声音信号,并通过麦克风之间的时间差或声音强度差来确定声源的位置。
数字信号处理模块:声音信号采集后,需要进行数字信号处理,一般包括信号滤波、时域分析、频域分析、噪声抑制等处理步骤。
处理后的声音信号可以更准确地确定声源的位置。
控制模块:控制模块通常采用微处理器或嵌入式系统,用于控制声音采集模块和数字信号处理模块的工作,并根据处理结果确定声源的位置。
二、基于STM32的声音定位系统的设计与实现基于STM32的声音定位系统通常包括硬件设计和软件设计两部分。
硬件设计:声音定位系统的硬件设计主要包括声音采集模块、数字信号处理模块和控制模块。
声音采集模块一般采用麦克风阵列,通过多个麦克风接收声音信号。
数字信号处理模块一般采用DSP或FPGA芯片,用于对采集到的声音信号进行处理。
控制模块一般采用STM32系列的单片机,用于控制声音采集模块和数字信号处理模块的工作,并进行数据处理和结果输出。
软件设计:声音定位系统的软件设计主要包括嵌入式软件和PC端软件。
嵌入式软件主要运行在STM32单片机上,用于控制硬件模块的工作,并进行声音信号的处理。
PC端软件一般用于与声音定位系统进行通信,接收处理结果并进行显示、记录等操作。
基于单片机的智能语音识别系统设计(硬件部分)系别:专业班:姓名:学号:指导教师:基于单片机的智能语音识别系统设计(硬件部分)The Design of Intelligent SpeechRecognition System Based onSingle-chip Computer(HardWare)摘要本文设计一个让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术的语音识别系统。
本语音识别系统以LD3320语音识别芯片为核心部件,主控MCU选用STC10L08XE。
主控MCU通过控制LD3320内部寄存器以及SPI flash实现语音识别和对话。
通过麦克风将声音信息输入LD3320进行频谱分析,分析后将提取到的语音特征和关键词语列表中的关键词语进行对比匹配,找出得分最高的关键词语作为识别结果输出给MCU,MCU针对不同的语音输入情况通过继电器对语音命令所对应的电器实现控制。
同时也可以通过对寄存器中语音片段的调用,实现人机对话。
设计中,电源模块采用3.3V供电,主要控制及识别部分采用LM1117-3.3稳压芯片,语音播放及继电器部分采用7812为其提供稳定的电流电压。
寄存器采用一片华邦SPI flash芯片W25Q40AVSNIG,大小为512Kbyte。
系统声音接收模块采用的传感器为一小型麦克风——驻极体话筒,在它接收到声音信号后会产生微弱的电压信号并送给MCU。
另外系统还采用单片机产生不同的频率信号驱动蜂鸣器来完成声音提示,此方案能完成声音提示功能,给人以提示的可懂性不高,但在一定程度上能满足要求,而且易于实现,成本也不高。
关键词:语音识别 LD3320 STC10L08XE单片机频谱分析AbstractThis paper designs a hi-tech speech recognition system which enables machines to transfer speech signals into corresponding texts or orders by recognizing and comprehending. The centerpiece of the speech recognition system is LD3320 voice recognition chip,its master MCU is STC10L08XE. Master MCU achieve voice conversation by controlling the internal registers and SPI flash LD3320.The sound information is inputted into LD3320 by microphone to do spectrum analysis. After analyzing the voice characteristics extracted are compared and matched with the key words in the list of key words.Then the highest scores of key words found would be output to MCU as recognition results. MCU can control the corresponding electrical real of speech recognition for different voice input through the relays and can also achieve voice conversation through a call to voice clips in register.In the design,power module uses 3.3V.The main control and identification part adopt LM1117-3.3 voltage regulator chip,and 7812 is used to provide stable current and voltage for the part of voice broadcast and relay.Register uses chip SPI flash W25Q40A VSNIG which is 512Kbyte. The sensor used in the speech reception module of the design is microphone,namely electrit microphone.After receiveing the sound signal,it can produce a weak voltage signal which will be sent to MCU. In addition,the system also adopts a different frequency signals generated by microcontroller to drive the buzzer to complete the voice prompt, and this program can complete the voice prompt.The program gives a relatively poor intelligibility Tips.However, to some extent,it can meet the requirements and is easy to implement and the cost is not high.Key words:Speech Recognition LD3320 STC10L08XE Single-chip computer Spectrum Analysis目录摘要 (I)Abstract (II)绪论 (1)1设计方案 (5)1.1 系统设计要求 (5)1.2总体方案设计 (5)2 系统硬件电路设计 (6)2.1电源模块 (6)2.2 寄存器模块 (6)2.3 控制单元模块 (7)2.3.1 STC10L08XE单片机简介 (8)2.3.2 STC11/10xx系列单片机的内部结构 (10)2.4 声音接收器模块 (10)2.5 声光指示模块 (11)2.6 语音识别模块 (11)2.6.1 LD3320芯片简介 (11)2.6.2 功能介绍 (12)2.6.3 应用场景 (13)2.6.4 芯片模式选择 (15)2.6.5 吸收错误识别 (16)2.6.6 口令触发模式 (17)2.6.7 关键词的ID及其设置 (18)2.6.8 反应时间 (18)3 系统软件设计 (20)3.1 系统程序流程图 (20)3.2 系统各模块程序设计 (20)3.2.1 主程序 (20)3.2.2 芯片复位程序 (27)3.2.3 语音识别程序 (28)3.2.4 声音播放程序 (37)4 系统调试 (44)4.1 软件调试 (44)4.1.1 上电调试 (44)4.1.2 读写寄存器调试 (44)4.1.3 检查寄存器初始值 (44)4.2 硬件电路调试 (45)4.2.1 硬件检查 (45)4.2.2 硬件功能检查 (45)4.3 综合调试 (46)结论 (47)致谢 (48)参考文献 (49)附录1实物图片 (50)附录2系统电路图 (51)绪论课题背景及意义让机器听懂人类的语音,这是人们长期以来梦寐以求的事情。
目录目录第1章绪论 (1)1.1课题研究的目的与意义 (1)1.2课题研究的内容与要求 (2)1.3国内外发展状况 (3)1.3.1 国内智能机器人发展概况 (3)1.3.2 国外智能机器人发展概况 (4)1.4智能移动机器人的广泛应用 (7)1.5智能移动机器人的发展趋势展望 (8)第2章系统方案论证和比较 (12)2.1系统整体方案比较与选择 (12)2.1.1 误差信号判断方式的比较与选择 (13)2.1.2 接收器分布方式的比较与选择 (13)2.1.3 移动体运动方式的比较与选择 (13)2.2系统各模块选择与论证 (14)2.2.1 车体方案的选择 (14)2.2.2 电源种类方案的选择 (15)2.2.3 供电方式方案的选择 (15)2.2.4 主控器芯片方案的选择 (16)2.2.5 电机驱动方案的选择 (16)2.2.6 电机模块方案的选择 (17)2.2.7 声源与声音传感器方案的选择 (17)2.2.8 声音调理期间的选择 (18)2.3制导系统方案的理论计算 (19)2.3.1 误差信号的产生 (19)2.3.2 滤波电路的理论计算 (20)2.3.3 声源定位原理 (20)2.4驱动系统方案的理论计算 (21)2.4.1 电机运行速度理论计算 (21)2.4.2 控制理论的简单计算 (22)第3章系统硬件设计 (23)i吉林工程技术师范学院本科毕业论文设计3.1系统总体框图设计 (23)3.2系统各模块硬件设计 (24)3.2.1 控制器子系统硬件设计 (24)3.2.2 声音接受子系统硬件设计 (27)3.2.3 电机驱动子系统硬件设计 (29)3.2.4 发声系统硬件设计 (30)第4章系统软件设计 (33)4.1系统主程序流程图 (33)4.2系统各模块子程序流程图 (34)4.2.1 声源位置计算子程序流程图设计 (34)4.2.2 电机驱动子程序流程图设计 (35)4.2.3 光标示子程序流程图设计 (36)4.2.4 PWM算法子程序 (36)4.2.5 控制接收器的子程序流程图设计 (36)第5章测试方案与测试结果 (38)5.1测试方案 (38)5.1.1 测试仪器 (38)5.1.2 测试数据 (39)5.2测试结果与误差分析 (40)5.2.1 测试结果分析 (40)5.2.2 误差分析 (40)附录 (41)致谢 (47)ii第1章绪论第1章绪论随着计算机技术和人工智能技术的飞速发展, 使机器人在功能和技术层次上有了很大的提高。
物联网技术 2023年 / 第9期220 引 言随着信息技术和人工智能的快速发展,声音导航跟踪定位的应用越来越广泛。
声音信号是人们传递信息的重要方式,在智能车载、智能家居、可穿戴设备等领域受到关注[1]。
声源定位技术,在现代工业制造中可以通过噪声和异响进行定位[2];在国防现代化方面,可以用来辅助测量炮兵阵地、定位狙击手位置、测量弹药、测试火炮的着落点和空中炸点[3];在生活中,可以准确识别空调、冰箱、洗衣机等家电产品的噪声源,从而确定其位置、分布,并优化控制减小噪声,改善人们的工作和生活环境[4]。
声源定位技术主要可以分成三大类:第一类是基于最大输出功率的可控波束形成技术;第二类是高分辨率谱估计技术;第三类是基于声达时间差的定位技术,利用到达阵列上各传声器的声音信号间的时间差来定位声源,这类技术计算量小,比较适用于实时处理,实际运用也十分广泛。
本文基于声源近场传播模型[5-6]设计并制作了一个以STM32为主控的声源定位跟踪系统,该系统实现了对较宽频率声源进行定位与追踪[7],在视频会议、语音增强、自动语音识别领域[8-9]有重要的应用价值。
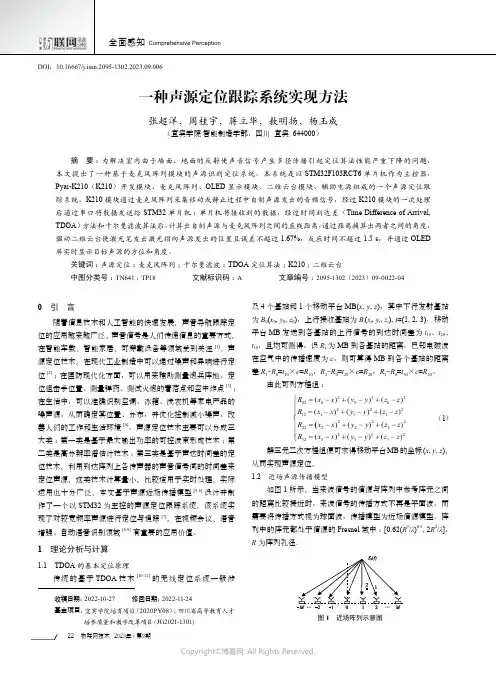
1 理论分析与计算1.1 TDOA 的基本定位原理传统的基于TDOA 技术[10-12]的无线定位系统一般涉及4个基站和1个移动平台MB(x , y , z ),其中下行发射基站为B 0(x 0, y 0, z 0),上行接收基站为B i (x i , y i , z i ), i =(1, 2, 3),移动平台MB 发送到各基站的上行信号的到达时间差为t 10、t 20、t 30,且均可测得。
设R i 为MB 到各基站的距离,已知电磁波在空气中的传播速度为c ,则可算得MB 到各个基站的距离差R 1-R 0=t 10×c =R 10,R 2-R 0=t 20×c =R 20,R 3-R 0=t 30×c =R 30。
由此可列方程组:R x x y y z z R x x y y z z R 020202021212121222=−+−+−=−+−+−=()()()()()()()()()()()()x x y y z z R x x y y z z 22222232323232−+−+−=−+−+− (1)解三元二次方程组便可求得移动平台MB 的坐标(x , y , z ),从而实现声源定位。
基于单片机的声音导航定位系统的设计关健生(厦门理工学院,福建厦门,361024)摘要:详细阐述了基于单片机的声音导航定位系统的设计过程,并给出了主要电路图。
该系统是以智能小车为运动体的声音定位测控系统,控制器由主从结构的两片STC89C52单片机构成,主芯片同时对三个处于不同位置的声音接收模块的音频信号进行处理和时间差测量,从芯片控制小车上的声源发出音频信号,根据主芯片用无线信号传送过来的误差信号,引导小车往目的地运动,也可实现路线选择及较精确定位 ,使该声音导航定位小车具有智能化。
关键词:单片机;声音定位;无线收发1 引 言 工业生产、生活的自动化都离不开智能化的机器,譬如:人们对太空的探索,对单调工作的替代,在危险环境中的操作等都需借助于智能化的行走、运动机构。
智能小车作为最常用的行走机构在工业生产与生活中得到了广泛的应用。
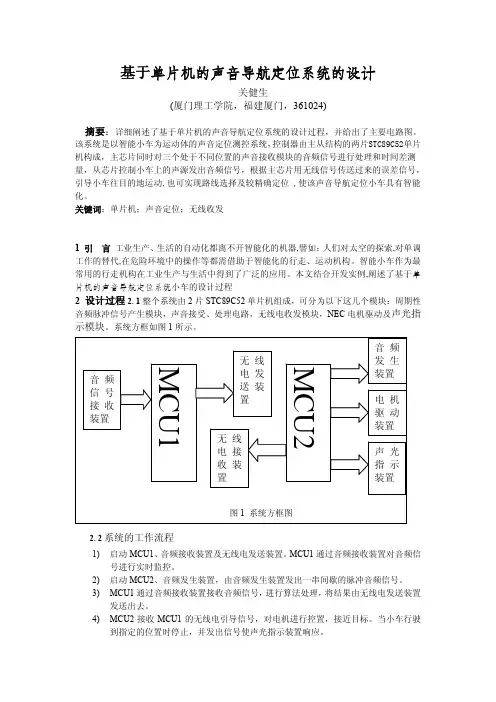
本文结合开发实例,阐述了基于单片机的声音导航定位系统小车的设计过程2 设计过程2. 1整个系统由2片STC89C52单片机组成,可分为以下这几个模块:周期性音频脉冲信号产生模块,声音接受、处理电路,无线电收发模块,NEC电机驱动及声光指示模块。
系统方框如图1所示。
2. 2系统的工作流程1)启动MCU1、音频接收装置及无线电发送装置。
MCU1通过音频接收装置对音频信号进行实时监控。
2)启动MCU2、音频发生装置,由音频发生装置发出一串间歇的脉冲音频信号。
3)MCU1通过音频接收装置接收音频信号,进行算法处理,将结果由无线电发送装置发送出去。
4)MCU2接收MCU1的无线电引导信号,对电机进行控置,接近目标。
当小车行驶到指定的位置时停止,并发出信号使声光指示装置响应。
压陶瓷片接收声音信号通过NE5532运放组成的音频检测放大电路。
压电陶瓷片由多晶体结构的压电材料锆钛酸铅制成。
在压电陶瓷片的两个底面加上正弦交变电压,它就会按正弦规律发生纵向伸缩,同样压电陶瓷可以在声压的作用下把声波信号转化为电信号。
单片机控制的目标跟踪系统设计与实现在现代科技越来越发达的今天,人们对于智能化技术的需求也越来越高,其中一个重要的方向就是目标跟踪技术。
在各种应用场景中,比如安防、交通、军事等方面,目标跟踪技术都能够发挥重要作用。
而单片机控制的目标跟踪系统,则是实现这一技术的一种重要方式。
下面我们将详细介绍单片机控制的目标跟踪系统设计与实现。
一、系统设计原理单片机控制的目标跟踪系统,其核心原理在于利用机器视觉技术来实现目标识别和跟踪。
具体来说,系统会先采集图像信号,再通过图像处理算法来实现目标的实时识别和跟踪,并最终将目标位置信息反馈给控制系统。
其中,图像信号采集和处理是整个系统的关键环节。
通常,系统会采用一些特定的传感器来捕获图像信号,比如热成像传感器、光学相机等。
而图像处理算法也是整个系统的核心之一。
它负责对捕获到的图像信号进行处理和分析,从而得出目标的相关信息,包括位置、大小、形状等等。
另外,控制系统也是整个单片机控制的目标跟踪系统中不可或缺的部分。
它负责接收图像处理算法传回的目标位置信息,并对控制终端实现实时控制和反馈。
二、系统实现过程在实现单片机控制的目标跟踪系统时,需要从如下几个方面考虑。
1、硬件设计硬件方面,需要根据系统的实际需求来选取合适的传感器和控制终端,搭建适合自己的硬件平台。
具体来说,这个过程一般包括:选取传感器:根据系统的实际需求和预算情况,从多种传感器中选出最适合自己的那一个。
选取控制终端:根据系统的实际需求和预算情况,从多种控制终端中选出最适合自己的那一种。
搭建硬件平台:根据自己选择的传感器和控制终端,搭建一个合适的硬件平台,进行后续的软件设计和实现。
2、软件设计在具备硬件平台的前提下,我们需要着重考虑软件设计的问题。
软件设计主要包括图像处理算法的编写和目标跟踪算法的设计,具体步骤如下:确定图像处理算法:根据硬件平台已选的传感器和系统的实际需求,确定用什么样的图像处理算法来实现目标识别和位置定位。
基于STM32的声音定位系统作者:严梓扬陈金栋张宏鑫来源:《中国新通信》 2017年第15期【摘要】本系统是用STM32 单片机产生频率为1000Hz 的正弦波信号,该信号用TDA2030 集成运放进行放大及驱动后输入到扬声器作为声源。
接收部分使用驻极体话筒进行接收,首先对接收的信号经过单管共射放大,使变化的电流信号转换为变化的电压信号。
然后经过由LM393 组成的电压跟随器进行稳压,当电流足够大让指示LED 亮起时,接收模块就向数据处理MCU 发送接收捕获成功信号,负责数据处理的STM32 触发定时器中断,纪录此接收模块收到信号的时间。
声源定位是通过对四个驻极体话筒接收到信号的时间先后进行处理,利用归一正方形算法可算得声源的坐标,即可进行声源定位。
最后,MCU 将计算结果通过OLED 液晶显示屏模块显示出来。
【关键词】归一正方形算法声音定位 STM32一、理论设计与论证1. 声音发生模块分析、计算。
由于正弦波频率f=1000Hz周期T=1/1000=1ms,让定时器计满0.5ms,将蜂鸣器输出口反转,再计满0.5ms 后将定时器溢出标志位置1,然后触发定时器溢出中断这样就可以产生1KHz 的正弦波。
2. 声音接收模块分析、计算。
由于接收到的信号强度随着距离的增加而快速衰减,因此在驻极体话筒输入电路后需要连接带通滤波和共射放大电路。
本作品的输入电路设计有一个LED,当有声音被录入时,电路会根据信号强度产生电流,电流流过LED 出现亮度时,通过wifi 向数据处理单元发送成功捕获的指令,负责数据处理的MCU 将开启定时器中断。
我们设计上使用了S9014 作为放大电路的三极管,通过数据手册理论上本电路的电压增益Au=200~450,足够将测试范围内最大距离的时候产生的电流放大到LED 足以产生亮度的范围。
3. 数据处理模块分析、计算。
数据处理部分是将信号通过比较器进行处理。
信号经过带通滤波后,其幅值可达到3.8V左右,而没有信号时噪声信号幅值比较小。
摘要今天,数码语音技术已经发展成为一种时尚化智能化,人性化的代表技术,出现在工业、交通、军事、安全保卫、教育、娱乐、体育、通讯、广告、旅游、休闲、政治宣传等各个领域。
自然的语音、声音是稍纵即逝的,聪慧的人类想了很多办法来留存它们,这样可以在任何需要的时候重复播放出来。
这种保留原声的媒介曾有过钢丝、黑胶唱片、胶片、磁带、激光唱片等等,这些媒介都需要精密复杂的机械传动装置来配合,大多体积比较大,耗电大,控制不够灵活,有介质磨损,使用寿命有限。
现在,我们可以采用数码电子技术将纯的无任何机械的半导体集成电路(IC)去完成语声信号的存储和还原,这样一类经过存储而还原播放的语言声音,我们称为数码语声。
这类保存着数码语声的集成电路我们称为数码语声电路,或语声IC,有了这些语声IC声音就能保留和还原,而且能被选择性地反复播放,也就能让不会说话的各种物品发出声音或开口说话。
语声IC具有体积小、耗电少、可控制性能好、永无磨损、永久寿命等特点。
它是采用电子处理技术将复杂的语声信号“切分”成很多份,以最小的单位存储在自己内部的存储器里。
当需要时,再把这些小份拼接成完整的语声信号播放出来。
经由语声IC的处理、保存再回放出来的声音效果会比原声有一定的失真,现在还原声音最好的是激光唱片方式,它的声音取样频率是44.1KHZ,取样位数是24位,简单的说就是把一秒钟的语声信号横着切24份,再竖着切4万4千多份,累计把一秒钟的信号切成了约100万份分别存储在激光唱片上,等播放时再拼在一起还原出来,因此有较好的还原度。
而语声IC因为制造技术和成本问题,其能够使用的存储器容量比较小,大多数的语声IC都采用6KHZ5位采样,即大约把一秒种的信号切成3万份,因此还原效果就要差不少。
但随着技术的发展,这一差距正在减少。
语声IC的成本主要取决于内部电路的复杂程度和存储器的容量,在短时间语声长度的产品中,语声IC的性能价格比是非常高,有的种类的语声IC价格低到只有几分钱,这是任何其它数码语声还原设备无法比拟的。
基于单片机的智能家居语音控制系统设计一、概述随着科技的飞速发展,智能家居系统正逐渐成为现代家庭生活中不可或缺的一部分。
这些系统通过集成各种先进的传感器、执行器和通信技术,为用户提供了更为便捷、舒适和节能的居住环境。
而语音控制技术作为智能家居领域的一项重要技术,其方便性、直观性和人性化特点受到了广泛关注。
基于单片机的智能家居语音控制系统设计,旨在通过单片机作为核心控制器,结合语音识别技术,实现对家居设备的语音控制。
该系统不仅提高了家居生活的便捷性,还通过智能调节家居设备的运行状态,达到了节能降耗的目的。
该系统还具备较高的可扩展性和灵活性,可以根据用户的实际需求进行定制和扩展。
在本文中,我们将详细介绍基于单片机的智能家居语音控制系统的设计方案。
我们将对系统的整体架构进行阐述,包括硬件组成和软件设计。
我们将重点介绍语音识别的实现方法,包括语音信号的采集、预处理、特征提取和识别算法等。
我们还将讨论单片机与家居设备之间的通信方式以及控制策略。
我们将对系统的性能进行评估,并展望未来的发展趋势和应用前景。
通过本文的介绍,读者将能够深入了解基于单片机的智能家居语音控制系统的设计原理和实现方法,为进一步的研究和应用提供有益的参考。
1. 智能家居的发展背景及现状随着科技的飞速发展和人们生活品质的不断提升,智能家居作为信息化社会的重要产物,正逐步融入千家万户的日常生活之中。
智能家居的发展背景源于人们对居住环境智能化、舒适化和便捷化的追求,以及对传统家居生活的革新与升级。
近年来,物联网、人工智能、云计算等技术的快速发展,为智能家居提供了强大的技术支撑。
通过集成各种传感器、控制器和执行器,智能家居系统能够实现对家庭设备的自动化控制和智能化管理,为人们带来前所未有的便捷体验。
同时,随着消费者对于个性化、定制化服务的需求日益增长,智能家居也在逐步向个性化、差异化方向发展。
目前,智能家居市场已呈现出蓬勃发展的态势。
众多企业纷纷涉足智能家居领域,推出了一系列具有创新性和实用性的产品。
目录第1章概述 (2)1.1课题背景 (2)1.2课题意义 (2)第2章课题要求 (2)2.1 任务设计要求 (2)2.2软件设计要求 (2)2.3硬件设计要求 (3)第3章总体设计思路与方案 (3)3.1 整体方案与框图 (3)3.2 单片机的选择 (4)第4章硬件电路设计 (5)4.1 AT89C51单片机简述及结构引脚说明 (5)4.2 设计方案与电路 (7)第5章软件程序设计 (8)5.1 软件设计框图 (8)5.2 程序设计 (8)第6章仿真调试与功能说明 (10)6.1 系统性能调试与仿真 (10)6.2 任务设计说明 (10)第7章设计总结 (11)第8章附录 (11)第1章概述1.1课题背景声光报警器在实际的生活中可以见到许多,运用于生活的许多方面,既有硬件实现的,也有硬件和软件同时控制执行。
本课题基于微机原理与接口技术的学习,运用汇编语言实现一个声光报警器的功能。
报警和发光同步进行。
因此用它进行报警探测监控,具有良好的隐蔽性,白天和黑夜都可以使用,而且其抗干扰能力强。
报警系统利用单片机控制技术,自动探测发生在布防区内的侵入行为,产生报警信号,一旦发生突发事件,就会向人们发出报警提示,从而让人即使采取应对措施。
1.1课题意义首先,通过课程任务设计,可以很好的对课本知识运用于实践,同时也可以激发学习于专业相关的一些知识,从而扩大自己知识面的广度。
其次,通过课题任务设计,在让我们思考使用学习工具的同时也学会去发现问题解决问题这一过程。
第2章课题要求2.1 任务设计要求设计一个声光报警器,当报警按钮按下时扬声器报警,扬声器用1kHZ信号响100ms,500Hz信号响200ms,交替进行声响报警,在报警期间报警指示灯亮,当报警解除按钮按下则解除报警。
2.2软件设计要求利用定时器以方式1工作,产生报警音符对应的1kHZ信号响100ms,500Hz信号响200ms的方波,由P1.0接报警灯,P1.1接报警喇叭,用P3.2接报警控制按钮,P3.3接报警停止按钮。
(19)中华人民共和国国家知识产权局(12)实用新型专利(10)授权公告号 (45)授权公告日 (21)申请号 201621124469.7(22)申请日 2016.10.10(73)专利权人 广东技术师范学院地址 510665 广东省广州市天河区中山大道西293号(72)发明人 罗忠辉 许锦川 白路 (51)Int.Cl.H04N 7/18(2006.01)H04N 5/232(2006.01)(ESM)同样的发明创造已同日申请发明专利(54)实用新型名称一种基于声源定位的追踪监控系统(57)摘要本实用新型专利是一种基于声源定位的追踪监控系统,有麦克风阵列(1)、音频解码器(2)、单片机(3)、指南针(4)、舵机(5)、转换器(6)、计算机(7)、摄像头(8)组成。
麦克风阵列(1)接收声源音频信息,输入到音频编码器(2)转换成数字信息传送给单片机(3)进行数据分析与处理。
单片机(3)控制舵机(5)调节麦克风阵列方向,用于准确定位声源方向;同时单片机(3)输出信息通过转换器(6)、计算机(7)控制摄像头(8)对焦声源进行视频采集,视频采集信号传输给计算机(7)进行图像处理与显示,实现实时动态监控功能。
本实用新型具有全局、准确、快速、不存在监控盲区等优点。
权利要求书1页 说明书2页 附图2页CN 206181249 U 2017.05.17C N 206181249U1.一种基于声源定位的追踪监控系统,有麦克风阵列(1)、音频解码器(2)、单片机(3)、指南针(4)、舵机(5)、转换器(6)、计算机(7)、摄像头(8)组成,其中舵机(5)的输出与麦克风阵列(1)、摄像头(8)连接,麦克风阵列(1)的输出信号经过音频解码器(2)与单片机(3)连接。
2.根据权利要求1所述的一种基于声源定位的追踪监控系统,其特征在于采用麦克风阵列(1)确定声源方向,以及声源三维空间位置。
3.根据权利要求1所述的一种基于声源定位的追踪监控系统,其特征在于通过单片机(3)控制指南针(4)及舵机(5),计算机(7)与摄像头(8)连接,通过计算机(7)采集与处理视频信号,实现快速实时监控。
基于STM32的声音定位系统一、引言随着科技的不断进步,声音定位技术在各个领域都有着广泛的应用。
比如在军事领域,声音定位技术可以用于敌情侦察和目标定位;在消费电子领域,声音定位技术可以用于实现音频增强和环绕声效果。
本文将介绍一种基于STM32的声音定位系统,该系统可以实现对声源的方向定位,并且可以应用到智能音箱、智能家居等领域。
二、STM32介绍STM32是意法半导体公司生产的一种32位RISC处理器微控制器,具有高性能、低功耗、丰富的外设以及丰富的开发资源等特点。
STM32系列产品广泛应用于工业控制、智能家居、汽车电子等领域。
三、声音定位系统原理声音定位系统是通过测量声音在不同麦克风之间的传播时间差来确定声源的方向。
在声音定位系统中,需要使用至少3个麦克风来实现声音的定位。
1. 声音信号采集系统首先需要进行声音信号的采集。
可以通过麦克风或者MEMS麦克风芯片来采集声音信号。
在STM32中,可以通过ADC模块实现模拟信号的采集。
2. 信号处理采集到的声音信号需要进行信号处理,主要是通过测量声音在不同麦克风之间的传播时间差来确定声源的方向。
常用的算法有交叉相关函数(Cross-Correlation)和最小二乘法(Least Square Method)。
3. 方向定位通过信号处理得到的传播时间差,可以根据声音传播的速度和声音的波形来计算声源的方向。
最后可以通过串口或者无线通信模块将定位结果传输到其他设备。
四、基于STM32的声音定位系统设计基于STM32的声音定位系统主要包括硬件设计和软件设计两个方面。
1. 硬件设计硬件设计包括麦克风模块、STM32单片机、时钟模块、无线通信模块等组成部分。
麦克风模块用于采集声音信号,STM32单片机用于信号处理和方向定位,时钟模块用于进行时钟同步,无线通信模块用于传输定位结果。
2. 软件设计软件设计主要包括STM32的程序设计和定位算法设计。
STM32的程序设计包括AD采集、信号处理、通信等模块的设计。
基于STM32的声音定位系统【摘要】基于STM32的声音定位系统是一种新兴的技术,具有广泛的应用前景。
本文首先介绍了声音定位系统的背景和研究意义,明确了研究目的。
接着,详细探讨了STM32在声音定位系统中的应用以及声音定位算法原理。
然后,介绍了系统的硬件设计与实现,并进行了系统性能测试。
对系统进行了优化,并总结出了创新点。
未来,我们可以进一步探讨声音定位系统在各个领域的应用,并完善系统的功能和效率。
通过本文的研究,为声音定位技术的发展提供了重要的参考和指导。
【关键词】STM32、声音定位系统、声音定位算法、硬件设计、系统性能测试、系统优化、创新点、研究展望、结论1. 引言1.1 背景介绍声音定位是一种在智能技术领域中十分重要的技术,它可以通过对声音信号的分析和处理,确定声源的位置信息。
随着科技的发展和人工智能的应用越来越普及,声音定位系统在安防监控、智能家居、无人驾驶等领域都有着广泛的应用前景。
研究基于STM32的声音定位系统具有重要的理论意义和实际价值。
随着STM32单片机在嵌入式系统中的广泛应用,它在声音定位系统中也被广泛采用。
STM32具有低功耗、高性能、丰富的外设接口等优势,能够满足声音定位系统对实时性、稳定性和精度的要求。
基于STM32开发声音定位系统成为了当前研究的热点之一。
本文旨在探讨基于STM32的声音定位系统的设计与实现,通过对声音定位算法原理的介绍和硬件设计的讨论,结合系统性能测试和优化,使得声音定位系统能够更好地适应不同场景的需求,提高系统的性能和稳定性。
希望通过本文的研究能够为声音定位系统的发展提供一些有益的参考和借鉴。
1.2 研究意义声音定位系统是一种能够准确识别声音来源方向的智能系统,具有广泛的应用前景和重要的研究意义。
在智能家居领域,声音定位系统可以帮助用户实现声控操作,提高生活的便利性和舒适性。
在安防监控领域,声音定位系统可以帮助监控人员快速定位异常声音来源,提升安防监控的效率和准确性。
如何设计基于单片机的声光控制开关1. 简介基于单片机的声光控制开关是一种智能化的电子设备,它能够通过声音和光线的检测来控制电路的开关状态。
这种开关广泛应用于各种领域,如家庭自动化、工业控制等。
2. 检测模块声光控制开关的核心是检测模块,它能够实时地监测环境中的声音和光线强度。
在设计中,我们可以选择合适的传感器,如声音传感器和光敏电阻,来实现检测功能。
3. 单片机控制单片机作为声光控制开关的控制中心,它能够根据检测模块的信号来判断环境状态,并控制开关的状态。
在这里,我们可以选择一些常用的单片机,如STC系列、PIC系列等,并编写相应的程序来实现控制功能。
4. 电路设计在电路设计中,我们需要考虑电源供应、信号采集、输出控制等方面的问题。
为了提高系统的稳定性和可靠性,还需要考虑一些保护电路的设计,如过压过流保护、温度保护等。
5. 系统优化在实际应用中,我们还可以对声光控制开关进行系统优化,比如增加无线通信功能、定时控制功能等,以实现更加智能化的功能。
总结和回顾基于单片机的声光控制开关设计,需要考虑检测模块、单片机控制、电路设计和系统优化等方面。
通过合理的设计和优化,我们可以实现一个稳定、可靠、智能化的声光控制开关系统。
个人观点和理解基于单片机的声光控制开关设计是一项非常有挑战性和创新性的工作,它需要我们在硬件和软件方面都有很高的要求。
随着物联网技术的不断发展,声光控制开关将会成为智能家居和工业自动化的重要组成部分。
通过对基于单片机的声光控制开关设计的深入研究和学习,我对硬件电路设计和嵌入式系统开发有了更深入的理解,也为今后的工作和学习积累了宝贵的经验。
文末附上参考文献:1. XXX, XXX, & XXX. (年份). 基于单片机的智能声光控制开关系统设计[J]. 电子技术与软件工程, 12(3), 45-49.2. XXX, XXX, & XXX. (年份). 基于AT89C51的声光控制开关设计[J].电子设计工程, 8(2), 67-72.3. XXX, XXX, & XXX. (年份). 基于PIC单片机的智能声光控制开关设计与实现[J]. 传感器技术, 5(1), 23-27.希望这篇文章对你有所帮助,如果有更多问题,欢迎随时沟通。
第1章绪论随着计算机技术和人工智能技术的飞速发展,使机器人在功能和技术层次上有了很大的提高。
由于这些技术的发展,推动了机器人概念的延伸。
通过声音导航定位,引导机器人往目的地运动,实现机器人的路线选择及较精确定位。
组建基于单片机的的声音导航定位系统,完成整个系统的软硬件设计。
机器人听觉定位跟踪声源系统研究是当前国际上的前沿课题。
它是机器人实现智能化必不可少的一部分,是智能科学研究成果在机器人上的体现。
尽管取得了一些令人鼓舞的成果,但是机器人距离实现智能化还有很长的路要走。
随着脑科学、认知科学和人工智能等学科研究的发展,机器人听觉能力必将产生突破性的进展。
1.1课题研究的目的与意义信号与信息处理学科是信息科学的重要组成部分,该学科水平的高低反映一个国家的整体科技水平。
数字信号处理已在通信、声音、图像、自动控制、雷达、军事、航空航天等领域实现广泛应用。
数字信号处理的主要研究对象是声音信号和图像信号。
现代技术发展中,实现智能化、数字化是控制系统的重要发展方向。
而声音信号的处理是重要应用之一。
滤波是声音信号处理的重要部分,其主要目的是在信号中提取有用信号,屏蔽无用的噪声。
将提取的有用信号进行处理,从而控制硬件实现智能化。
声音控制小车是未来智能化发展的方向之一。
声音定位在人和动物的日常生活中着重要意义。
通过声音导航定位,引导机器人往目的地运动,实现机器人的路线选择及较精确定位。
组建基于单片机的的声音导航定位系统,完成整个系统的软硬件设计。
声音滤波电路在实际生活中有很多应用,可以通过声音的采集滤波实现对某种声音的响应,比如智能声控机器人,通过人的声音对智能机器人实现起名,控制向左、向右行走等。
1第1章绪论1.2课题研究的内容与要求声音定位在人和动物的日常生活中着重要意义。
通过声音导航定位,引导机器人往目的地运动,实现机器人的路线选择及较精确定位。
组建基于单片机的的声音导航定位系统,完成整个系统的软硬件设计。
设计了一个基于单片机的声音引导跟踪系统,利用传声器(MIC)接收从机发出的声音信号,经过前级信号调理电路,完成信号的检测;由主机控制芯片MCU对采集的声音信号进行处理,跟踪声源,计算出与移动声源位置信息,显示出相对关系,从而实现了对移动声源跟踪。
系统包含传感器的信号采集,液晶显示部分和电机驱动的电路选型设计,以及单片机的程序设计。
利用L298N双H桥电路组合而成的驱动模块,以LED数码管所组成的显示模块等组成的外围车载电路,辅之以接近硬件的汇编语言进行软件编程,实现了电动小车根据接收器传回的信号,启动,加速,变速,限速,停止,转向等各项运动,并能够通过LED显示小车行驶的路程和时间。
本系统通过调节PWM占空比来改变小车的速度,实现了对小车速度的精确控制,达到了很好的效果,可广泛应用于控制领域。
1.3国内外发展现状机器人学的进步与应用是二十世纪自动控制最有说服力的成就,是当代最高意义的自动化,尤其在当今的工业制造中,机器人学已取得了最伟大的成功。
进入二十一世纪,人们已经愈来愈亲身地感受到机器人深入生产、生活和社会的坚实步伐。
一方面随着各个国家老龄化越来越严重,更多的老人需要照顾,社会保障和服务的需求也更加紧迫,老龄化的家庭结构必然使更多的年青家庭压力增大,而且生活节奏的加快和工作的压力,也使得年轻人没有更多时间陪伴自己的孩子,随之酝酿而生的将是广大的家庭服务机器人市场。
另一方面服务机器人将更加广泛地代替人从事各种生产作业, 使人类从繁重的、重复单调的、有害健康和危险的生产作业中解放出来。
本文对服务机器人技术的研究现状和应用及其未来发展进行了综述。
21.3.1国内智能机器人发展概况机器人产业是近30年发展起来的新型产业。
我国政府早就开始组织了对工业机器人的攻关,到了1987年,国家高技术研究开发计划就把智能机器人作为七大重点领域之一进行集中研究。
经过十几年的艰苦奋斗,我国在水下、空间、核领域等特殊机器人方面取得了令人欣慰的成果,一批机器人产品和机器人应用工程应运而生。
到20世纪90年代末,我国共完成了l00多项工业机器人应用工程,建成了20个机器人产业化基地,从事机器人研究、开发和应用工程单位200多家,专业从事机器人产业开发的50家左右,全国工业机器人用户近800家,拥有工业机器人约4000台。
2006年发布的《国家中长期科学和技术发展规划纲要》前沿技术中,我国将智能服务机器人列为重点方向,提出加大科技投入与科技基础条件平台建设。
经过20多年的发展,我国已在多项机器人关键技术中取得了突破性的发展。
以中科院沈阳自动化研究所及清华大学、东北大学、哈尔滨工业大学为代表的我国机器人研究基地,已经取得了令人瞩目的成果。
比如1989年我国研制的水下机器人就已出口到美国。
1995年我国又成功研制了深潜水下机器人。
同年我国自主开发的机器人关键技术出口韩国。
1997年我国的高性能机器人控制器投入批量生产。
这些具有代表性的技术成果均达到当时国际上的先进水平。
我国在机器人领域不但狠抓技术攻关,同时也注重人才培养。
为我国培养了一大批机器人技术的研究人才。
近10年来,我国涌现出机器人领域的学术带头人近100名,共发表具有一定学术价值的论文6 000多篇。
在国家的有力支持下,我国机器人步入了跨跃式发展时期。
据不完全统计,在机器人领域中76项关键技术及应用基础技术的研究成果达到了国际先进水平。
获国家科技进步奖23项,省部级科技进步奖130多项,发明专利500多项,实用型专利120多项。
从应用情况看,我国的机器人已经逐步走向产业化。
国家已将沈阳新松机器人自动化股份有限公司等9个单位确定为以智能机器人研究为主题的产业化基地。
现在全国约有工业机器人用户700多家,拥有工业机器人大约4200台,其中国产机器人占1/5,其余从日、美、德等40多个国家进口。
由以上分析可以看出,近10年来我国机器人技术得到了迅速的发展。
从技术水平上看,在某些方面与世界机器人技术水平的差距不是很大。
但是,从应用的广3第1章绪论泛性来讲我国与日美发达国家相比就有很大的差距。
特别是比较现役机器人的数量,我国与国际强国相比差距更大。
我国对服务机器人的研究起步很晚,但国家对此非常重视,1986年3月才开始把研究、开发智能机器人的内容已列入国家863高科技发展规划中,从1986年至2009年的20多年中,智能机器人主题在863的旗帜下,团结了近几千人的研究开发队伍,圆满完成各项任务,建成了一批高水平的研究开发基地,造就了一支跨世纪的研究开发队伍,为我国21世纪机器人技术的持续创新发展奠定了基础。
我国对服务机器人的研究起步很晚,但国家对此非常重视,1986年3月才开始把研究、开发智能机器人的内容已列入国家863高科技发展规划中,从1986年至2009年的20多年中,智能机器人主题在863的旗帜下,团结了近几千人的研究开发队伍,圆满完成各项任务,建成了一批高水平的研究开发基地,造就了一支跨世纪的研究开发队伍,为我国21世纪机器人技术的持续创新发展奠定了基础随着工业机器人技术发展的深度和广度以及只能水平的提高,工业机器人已在众多领域得到了应用,并还在不断的扩大,已从汽车制造业推广到机械加工行业、电子电气行业、食品行业等领域中。
1.3.2国外智能机器人发展概况日本将机器人作为一个战略产业,给予了大力支持,而且日本根据目前机器人产业面临的问题,提出了加强机器人研究和推动机器人产业化的具体措施,日本机器人工业之所以领先世界,这和他们的机器人文化也有关,在日本,由于人口不多,而且老龄化趋势严重,他们需要机器人来承担劳力的工作,因此培养起浓厚的机器人文化,日本政府也希望机器人研发成为本国的支柱产业,所以投入大量资金。
韩国将服务机器人技术列为未来国家发展的10大发动机产业,他们已经把服务型机器人作为国家的一个新的经济增长点进行着重发展,对机器人技术给予了重点扶持,通过不断地努力,韩国近几年来也逐渐跻身研究机器人的世界潮流。
美国在机器人发展史上走过一条重视理论研究,忽视应用开发研究的曲折4道路,但是美国的机器人技术在国际上仍一直处于领先地位,其技术全面、先进,适应性也很强。
德国的社会环境却是有利于机器人工业发展的,因为战争,导致劳动力短缺,以及国民技术水平高,都是实现使用机器人的有利条件。
到了70年代中后期,政府采用行政手段为机器人的推广开辟道路,即对于一些有危险、有毒、有害的工作岗位,必须以机器人来代替普通人的劳动,这个计划推动了服务机器人技术的发展。
德国经过近十年的努力,其服务机器人的研究和应用方面在世界上处于公认的领先地位。
法国不仅在机器人拥有量上居于世界前列,而且在机器人应用水平和应用范围上处于世界先进水平,这主要归功于法国政府一开始就比较重视机器人技术,大力支持服务机器人研究计划,并且建立起一个完整的科学技术体系,特别是把重点放在开展机器人的应用研究上。
从70年代末开始,英国政府推行并实施了一系列支持机器人发展的政策和措施,如广泛宣传使用机器人的重要性、在财政上给购买机器人企业以补贴、积极促进机器人研究单位与企业联合等,使英国机器人开始了在生产和服务领域广泛应用及大力研制的兴盛时期。
俄罗斯由于没有国家发展服务机器人的统一规划,有限的国家订货和市场需求使得俄罗斯机器人技术的发展以科研和实验为主,以储备技术,便于随时根据市场需要制造出高质量的机器人,当前俄罗斯机器人的技术面临的问题是机器人技术的智能化程度较低,需要不断地增加功能、同时完善技术和提高质量。
1.4智能移动机器人的广泛应用现代智能移动机器人基本能按人的指令完成各种比较复杂的工作,如深海探测、作战、侦察、搜集情报、抢险、服务等工作,模拟完成人类不能或不愿完成的任务,不仅能自主完成工作,而且能与人共同协作完成任务或在人的指导下完成任务,在不同领域有着广泛的应用。
智能移动机器人按照工作场所的不同,可以分为管道、水下、空中、地面机器人等。
管道机器人可以用来检测管道使用过程中的破裂、腐蚀和焊缝质量情况,在恶劣环境下承担管道的清扫、5第1章绪论喷涂、焊接、内部抛光等维护工作,对地下管道进行修复;水下机器人可以用于进行海洋科学研究、海上石油开发、海底矿藏勘探、海底打捞救生等;空中机器人可以用于通信、气象、灾害监测、农业、地质、交通、广播电视等方面;服务机器人半自主或全自主工作、为人类提供服务,其中医用机器人具有良好的应用前景;仿人机器人的形状与人类似,具有移动功能、操作功能、感知功能、记忆和自治能力,能够实现人机交互;微型机器人以纳米技术为基础在生物工程、医学工程、微型机电系统、光学、超精密加工及测量等方面具有广阔的应用前景。
在国防领域中,军用智能移动机器人得到前所未有的重视和发展,近年来,美英等国研制出第二代军用智能移动机器人,其特点是采用自主控制方式,能完成侦察、作战和后勤支援等任务,在战场上具有看、嗅等能力,能够自动跟踪地形和选择道路,具有自动搜索、识别和消灭敌方目标的功能。