(整理)计算结构动力学2
- 格式:doc
- 大小:895.50 KB
- 文档页数:23
南华大学《结构力学II》习题集(适合于大土木工程各专业方向)组编:刘华良班级:姓名:学号:建筑工程与资源环境学院道路桥梁工程教研室衡阳2005年前言本习题集取材于第九章位移法9-l 确定下列各结构的位移法未知数目,并绘出基本结构。
9-2~9-3 用位移法计算下列结构内力.并绘出其弯矩图、剪力图和轴力图。
题9-2图题9-3图9-4~9-11 用位移法绘制下列结构弯矩图。
题9-4图题9-5图题9-6图题9-7图题9-8图题9-9图题9-10图题9-11图9-12~9-15 用位移法绘制下列具有斜杆的刚架的弯矩图。
题9-12图题9-13图题9-14图题9-15图9-16~9-17 列出下列结构的位移法典型方程式,并求出所有系数和自由项。
题9-16图题9-17图9-18~9-23 用位移法绘制下列具有无限刚性杆结构的M图。
题9-18图题9-19图题9-20图题9-21图题9-22图题9-23图9-24~9-26 用位移法绘制下列刚架M图。
题9-24图题9-25图题9-26图9-27 用位移法绘制图9-27所示结构弯矩图,并求桁架杆的轴向力。
题9-27图9-28 用位移法求图9-28所示桁架各杆轴向力。
题9-28图9-29 图9-29所示为一个三角形刚架,考虑杆件的轴向变形,试写出位移法的典型方程,并求出所有系数和自由项。
题9-29图9-30~9-31 用位移法计算图示有剪力静定杆组成的刚架的M图。
题9-30图题9-31图9-32~9-41 利用对称性,用位移法求作下列结构的M图。
题9-32图题9-33图题9-34图题9-35图题9-36图题9-37图题9-38图题9-39图题9-40图题9-41图9-42~9-48 试直接按平衡条件建立位移法方程计算题9-2、9-5、9-8、9-11、9-12、9-24、9-35,并绘出M图。
题9-42图题9-43图题9-44图题9-46图题9-47图题9-48图9-49~9-52 试用位移法求作下列结构由于支座位移产生的M图。
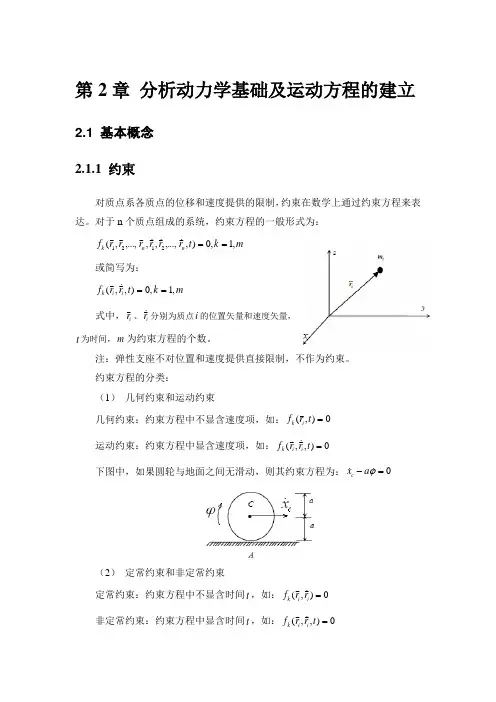
第2章 分析动力学基础及运动方程的建立2.1 基本概念 2.1.1 约束对质点系各质点的位移和速度提供的限制,约束在数学上通过约束方程来表达。
对于n 个质点组成的系统,约束方程的一般形式为:m k t r r r r r r f n n k ,1,0),,...,,,,...,,(2121== 或简写为:m k t rr f i i k ,1,0),,(== 式中,i r 、i r分别为质点i 的位置矢量和速度矢量,t 为时间,m 为约束方程的个数。
注:弹性支座不对位置和速度提供直接限制,不作为约束。
约束方程的分类: (1) 几何约束和运动约束几何约束:约束方程中不显含速度项,如:0),(=t r f i k运动约束:约束方程中显含速度项,如:0),,(=t rr f i i k 下图中,如果圆轮与地面之间无滑动,则其约束方程为:0=-ϕ a xc(2) 定常约束和非定常约束定常约束:约束方程中不显含时间t ,如:0),(=i i k r r f 非定常约束:约束方程中显含时间t ,如:0),,(=t rr f i i k222l y x =+ 222)(ut l y x -=+(3) 完整约束与非完整约束完整约束:几何约束以及可积分的运动约束 非完整约束:不可积分的运动约束方程0=-ϕ a xc 可积分为0=-ϕa x c ,因此是完整约束。
(4) 单面约束与双面约束单面约束:约束方程为不等式,如:0),,(≤t r r f i i k 双面约束:约束方程为等式,如:0),,(=t rr f i i k 下图中,如果考虑到绳子可以缩短,则其约束方程为:222l y x ≤+,表现为不等式形式,就是一个单面约束。
一般分析力学的研究对象为:完整的双面约束,方程为:0),(=t r f i k。
2.1.2 广义坐标与自由度广义坐标:描述系统位置状态的独立参数,称为系统的广义坐标。
广义坐标的个数:(1) 空间质点系:m n N -=3 (2) 平面质点系:m n N -=2对于如图双连刚杆的平面两质点系统,约束方程为:⎩⎨⎧=-+-=+22212212212121)()(l y y x x l y x 广义坐标个数为:2222=-⨯=N ,具体地可选择为:),(21x x ;),(21y y ;),(21y x ;),(21x y ;),(21ϕϕ等。
结构动力计算课后习题答案结构动力计算课后习题答案在学习结构动力学这门课程时,我们经常会遇到各种各样的习题。
这些习题旨在帮助我们巩固所学的知识,并提供实践的机会。
在这篇文章中,我将为大家提供一些结构动力计算课后习题的答案,希望能对大家的学习有所帮助。
1. 计算一个简支梁的固有频率。
答案:简支梁的固有频率可以通过以下公式计算:f = (1/2π) * √(k/m)其中,f为固有频率,k为刚度,m为质量。
在简支梁的情况下,刚度k等于弹性模量E乘以截面面积A除以长度L。
质量m等于密度ρ乘以截面面积A除以长度L。
2. 计算一个悬臂梁的固有频率。
答案:悬臂梁的固有频率可以通过以下公式计算:f = (1/2π) * √(3k/m)在悬臂梁的情况下,刚度k等于弹性模量E乘以截面面积A的三次方除以长度L的四次方。
质量m等于密度ρ乘以截面面积A除以长度L。
3. 计算一个简支梁的振动模态。
答案:简支梁的振动模态可以通过以下公式计算:f_n = (n^2 * v) / (2L)其中,f_n为第n个振动模态的频率,v为波速,L为长度。
n为振动模态的序号,从1开始。
4. 计算一个悬臂梁的振动模态。
答案:悬臂梁的振动模态可以通过以下公式计算:f_n = (2n-1) * (v/4L)其中,f_n为第n个振动模态的频率,v为波速,L为长度。
n为振动模态的序号,从1开始。
5. 计算一个简支梁的最大挠度。
答案:简支梁的最大挠度可以通过以下公式计算:δ_max = (5qL^4) / (384EI)其中,δ_max为最大挠度,q为均布载荷,L为长度,E为弹性模量,I为截面惯性矩。
6. 计算一个悬臂梁的最大挠度。
答案:悬臂梁的最大挠度可以通过以下公式计算:δ_max = (qL^4) / (8EI)其中,δ_max为最大挠度,q为均布载荷,L为长度,E为弹性模量,I为截面惯性矩。
以上是一些常见的结构动力计算课后习题的答案。
通过解答这些习题,我们可以更好地理解结构动力学的概念和原理,提高我们的计算能力和问题解决能力。
第2章 分析动力学基础2.1 基本概念 2.1.1 约束对质点系各质点的位移和速度提供的限制,约束在数学上通过约束方程来表达。
对于n 个质点组成的系统,约束方程的一般形式为:m k t r r r r r r fn n k ,1,0),,...,,,,...,,(2121== 或简写为:m k t rr f i i k ,1,0),,(== 式中,i r 、i r分别为质点i 的位置矢量和速度矢量,t 为时间,m 为约束方程的个数。
注:弹性支座不对位置和速度提供直接限制,不作为约束。
约束方程的分类: (1) 几何约束和运动约束几何约束:约束方程中不显含速度项,如:0),(=t r f i k运动约束:约束方程中显含速度项,如:0),,(=t rr f i i k 下图中,如果圆轮与地面之间无滑动,则其约束方程为:0=-ϕ a xc(2) 定常约束和非定常约束定常约束:约束方程中不显含时间t ,如:0),(=i i k r r f 非定常约束:约束方程中显含时间t ,如:0),,(=t rr f i i k222l y x =+ 222)(ut l y x -=+(3) 完整约束与非完整约束完整约束:几何约束以及可积分的运动约束 非完整约束:不可积分的运动约束方程0=-ϕ a xc 可积分为0=-ϕa x c ,因此是完整约束。
(4) 单面约束与双面约束单面约束:约束方程为不等式,如:0),,(≤t r r f i i k 双面约束:约束方程为等式,如:0),,(=t rr f i i k 下图中,如果考虑到绳子可以缩短,则其约束方程为:222l y x ≤+,表现为不等式形式,就是一个单面约束。
一般分析力学的研究对象为:完整的双面约束,方程为:0),(=t r f i k。
2.1.2 广义坐标与自由度广义坐标:描述系统位置状态的独立参数,称为系统的广义坐标。
广义坐标的个数:(1) 空间质点系:m n N -=3 (2) 平面质点系:m n N -=2对于如图双连刚杆的平面两质点系统,约束方程为:⎩⎨⎧=-+-=+22212212212121)()(l y y x x l y x 广义坐标个数为:2222=-⨯=N ,具体地可选择为:),(21x x ;),(21y y ;),(21y x ;),(21x y ;),(21ϕϕ等。
如果系统的位移状态),(t x u 可以通过一组基函数)(x f i 来线性组合,如:∑=ii i x f t q t x u )()(),(,由于各系数)(t q i 相互独立,因此系数)(t q i 也是一种广义坐标。
例:简支梁的挠度曲线可表示为∑=ii lxi t q t x y πsin)(),(,)(t q i 为与基函数lxi πsin对应的广义坐标。
根据广义坐标的概念,设系统的广义坐标个数为N ,当选定系统的广义坐标),1(N k q k =后,系统的位置状态可以由全部广义坐标来表示,也即有:),(),,...,,(21t q r t q q q r r k i N i i==,n i ,1=自由度:某瞬时,系统独立运动的个数。
自由度强调的是独立运动也即独立速度,广义坐标强调的是独立坐标(位移)。
对于完整系统,自由度与广义坐标的个数相同;对于非完整系统,由于存在非完整约束,对独立速度的限制多于对独立坐标的限制,因此自由度数比广义坐标个数少。
2.1.3 力的功对于力k t Z j t Y i t X t F)()()()(++=,设在微小时间间隔dt 内力作用点的位移为k dz j dy i dx r d++=,则该力做的功称为元功:dz t X dy t X dx t X dr t F r d t F W )()()(cos )()(++==⋅=θδ式中,θ为)(t F 与r d的夹角。
经过一段路径AB ,做的总功为:⎰⎰++=⋅=B ABAdz t Z dy t Y dx t X r d t F W )()()()(对于力偶)(t M ,设在微小时间间隔dt 内物体在力偶作用下的转角为ϕd ,则元功为:ϕδd t M W )(=转过一定角度121ϕϕϕ-=∆,做的总功为:⎰=21)(ϕϕϕδd t M W力、力偶在单位时间内做的功称为功率:r t F dt r d t F dt W dt dW p⋅=⋅===)()(δ ϕϕδ )()(t M dtd t M dt W dt dW p ==== 2.1.4 有势力与势能有势力:在作用点变化过程中,力做的功如果只与起止位置有关,而与中间路径无关,则这个力称为有势力,有势力所在的空间称为该有势力的势力场,如重力与重力场。
势能:在势力场中,物体从位置),,(z y x M 运动到任选的位置),,(0000z y x M ,有势力所作的功称为物体在位置M 相对于位置0M 的势能,以V 表示:⎰⎰++=⋅=0M MM MZdz Ydy Xdx r d F V位置0M 的势能等于零,称为零势能位置(点、状态)。
势能V 是位置),,(z y x M 的函数,记为),,(z y x V 。
有势力分量与势能具有如下关系:x V X ∂∂-=,y V Y ∂∂-=,zVZ ∂∂-=证明如下:当),,(z y x M 具有微小变化变为),,('dz z dy y dx x M +++时,势能的增量为:][''''0000Zdz Ydy Xdx rd F rd F r d F rd F r d F rd F r d F dV M MMM M M M M M M M M ++-=⋅-=⋅-=⋅=⋅+⋅=⋅-⋅=⎰⎰⎰⎰⎰⎰因此有:x V X ∂∂-=,y V Y ∂∂-=,zVZ ∂∂-=当弹性体变形后,恢复变形到原始状态的过程中,弹性力会做功,做的功等于变形状态改变释放的变形能,只与前后变形状态有关,因此具有势能的性质。
弹性体因变形而具有变性能为:⎰ΩΩ+++++=d V zx zx yz yz xy xy z z y y x x )(21γτγτγτεσεσεσ 2.1.5 虚位移虚位移:某瞬时,约束所容许的任意微小位移。
要点1:“某瞬时”意味着虚位移不考虑时间的变化,也即是虚位移无时间过程。
要点2:“约束所容许”表示不破坏约束,满足约束条件。
要点3:“微小位移”指位移小到只考虑一阶变化。
要点4:“任意”指无需考虑真实的力、速度和时间等真实运动因素,可以人为地设定。
要点5:对于一个系统,由于存在内部的约束联系,各位置点的虚位移不具有完全的任意性。
要点6:根据定义,独立虚位移的个数等于系统的自由度数。
概念辨析:可能位移:考虑时间,但不考虑运动的原因,约束所容许的位移称为可能位移。
真实位移:同时考虑时间和运动的原因,约束所容许的位移称为真实位移,真实位移是可能位移中的一种。
可能位移和真实位移不具有“微小”性,因此可能位移不一定是虚位移。
设系统的广义坐标为),1(N k q k =,系统的位置状态可以由全部广义坐标表示为:),(),,...,,(21t q r t q q q r r k i N i i==,n i ,1=根据微积分的概念,任一质点i 的位移增量有如下关系:dt t r dq q r dt t r dq q r dq q r dq q r r d i Nk k ki i N N i i ii ∂∂+∂∂=∂∂+∂∂++∂∂+∂∂=∑= 12211...略去上式中与时间有关的增量,将k dq 变为虚位移k q δ,则可得到质点i 的虚位移:∑=∂∂=N k k ki i q q r r 1δδ上式建立了任一点虚位移与广义坐标虚位移的关系。
由于各广义坐标是独立的,因此各广义坐标可以独立发生虚位移。
当只有一个广义坐标k q 有虚位移k q δ时,质点i 的虚位移为:k ki i q q r r δδ∂∂=另外,根据约束方程也可建立虚位移之间的关系,方法如下:对于约束方程0),(=t r f i k,有:0)(11=∂∂+∂∂+∂∂=∂∂∑∑==ni i i ki i k i i k ni i i k z z f y y f x x f r r f δδδδ 例如:222)(ut l y x -=+有:022=⋅+⋅y y x x δδ0=⋅+⋅y y x x δδ2.1.5 虚功与广义力虚功:力在虚位移上所做的功称为虚功。
力系i F中各力作用点的虚位移为:∑=∂∂=N k k ki i q q r r 1δδ则总虚功为:∑∑∑∑∑∑∑=======∂∂⋅=∂∂⋅=∂∂⋅=⋅=N k k n i k i i N k n i k k ii n i N k k k i i ni i i q q r F q q r F q q r F r F W 1111111])([)()()(δδδδδ记:∑=∂∂⋅=ni k i i k q rF Q 1)( 为与k q δ对应的广义力,则有:∑==Nk k k q Q W 1δδ广义力的计算方法:(1)记:k Z j Y i X F i i i i++=,得:∑∑==∂∂+∂∂+∂∂=∂∂⋅=n i k i i k i i k i i ni k ii k q z Z q y Y q x X q r F Q 11)()((2)单独使一个广义坐标k q 发生虚位移k q δ,此时的虚功为:k k q Q W δδ=因此有:kk q W Q δδ=(3)如果所有力均为有势力,根据:i i x V X ∂∂-=,ii y V Y ∂∂-=,i i z VZ ∂∂-= 得:kni kii k i i k i i ni ki i k i i k i ini k i i k q V q z z V q y y V q x x V q z Z q y Y q x X q r F Q ∂∂-=∂∂∂∂+∂∂∂∂+∂∂∂∂-=∂∂+∂∂+∂∂=∂∂⋅=∑∑∑===111)()()(例题2-1:如图双摆,以1ϕ、2ϕ为广义坐标,对于重力g m P 11=、g m P 22=的广义力。
解: 方法1:111cos ϕl y =221121111sin δϕϕδl y -=2221112sin sin δϕϕδϕϕδl l y --=222211121222111211112211sin sin )()sin sin ()sin (δϕϕδϕϕδϕϕδϕϕδϕϕδδδl P l P P l l P l P y P y P W -+-=--+-=+= 因此有:11211sin )(ϕl P P Q +-= 2222sin ϕl P Q -=方法2:首先只让1ϕ产生一个虚位移1δϕ,两质点的虚位移为:1121δϕδδl r r ==虚功为:1112111121111122111sin )(sin sin sin sin δϕϕϕδϕϕδϕϕδϕδδl P P l P l P r P r P W +-=--=--= 因此广义力为:11211sin )(ϕl P P Q +-=再只让2ϕ产生一个虚位移2δϕ,两质点的虚位移为:1=r δ 222δϕδl r =虚功为:22222222222sin sin sin δϕϕϕδϕϕδδl P l P r P W -=-=-= 因此广义力为:2222sin ϕl P Q -=方法3:111cos ϕl y =22112以O 处为重力势能零点,系统的势能为:2221121*********211cos cos )()cos cos (cos ϕϕϕϕϕl P l P P l l P l P y P y P V -+-=+--=--= 广义力为:112111sin )(ϕϕl P P VQ +-=∂∂-= 22222sin ϕϕl P VQ -=∂∂-= 2.2 虚功(虚位移)原理 2.2.1 理想约束虚功的计算公式为:∑∑===⋅=N k k k n i i i q Q r F W 11)(δδδ一个系统可能有很多力,但是有些力在虚位移上不做功。