控制论第一讲
- 格式:ppt
- 大小:1.00 MB
- 文档页数:65
诺伯特·维纳的控制论标签:控制论顶[4]分享到发表评论(0)诺伯特·维纳的控制论概述自从1948 年诺伯特·维纳发表了著名的《控制论——关于在动物和机器中控制和通讯的科学》一书以来,控制论的思想和方法已经渗透到了几乎有的自然科学和社会科学领域。
维纳把控制论看作是一门研究机器、生命社会中控制和通讯的一般规律的科学,更具体他说,是研究动态系统在变化的环境条件下如何保持平衡状态或稳定状态的科学。
他特意创造“Cybernetics”这个英语新词来命名这门科学。
“控制论”一同最初来源希腊文“mberuhhtz”,原意为“操舵术”,就是掌舵的方法和技术的意思。
在柏拉图(古希腊哲学家)的著作中,经常用它来表示管理人的艺术。
1834 年,著名的法国物理学家安培写了一篇论述科学哲理的文章,他进行科学分类时,把管理国家的科学称为“控制论”,他把希腊文译成法语“Cybernetigue”。
在这个意义下,“控制论”一词被编入19 世纪许多著词典中。
维纳发明“控制论”这个词正是受了安培等人的启发。
在控制论中,“控制”的定义是:为了“改善”某个或某些受控对象的功能或发展,需要获得并使用信息,以这种信息为基础而选出的、加于该对象上的作用,就叫作控制。
由此可见,控制的基础是信息,一切信息传递都是为了控制,而任何控制又都有赖于信息反馈来实现。
信息反馈是控制论的一个极其重要的概念。
通俗他说,信息反馈就是指由控制系统把信息输送出去,又把其作用结果返送回来,并对信息的再输出发生影响,起到控制的作用,以达到预定的目的。
控制论的发展过程控制论的发展过程大致分为三个阶段:20世纪50年代末期以前为第一阶段,称为经典控制论阶段;50年代末期至70年代初期为第二阶段,称为现代控制论阶段;70年代初期至现在为第三阶段,称为大系统理论阶段。
经典控制论主要研究单输入和单输出的线性控制系统的一般规律,它建立了系统、信息、调节、控制、反馈、稳定性等控制论的基本概念和分析方法,为现代控制理论的发展奠定了基础。
控制论1、控制论的基本概念2、控制系统的偶合关系与方框图3、控制系统的变换算子4、控制系统的状态空间表达式5、系统的可观测性与可控制性6、最优控制7、大系统控制1 控制的基本概念定义1所谓控制是施控者选择适当的手段,以期引起受控者行为发生预期变化的一种策略性的主动行为。
定义2 (从输入与输出关系角度)控制是通过改变系统输入,使系统输出尽可能达到设定值的方法。
定义3(从控制与不确定性关系角度)控制是在描述与研究输入U与输出Y之间因果关系f不确定性的基础上,从多种可能性中进行选择,找出能够处理这种不确定性的控制手段,使系统在不确定的条件下,达到比较确定的目标。
定义4(从控制与信息相互关系的角度)控制是在获取、加工和使用信息的基础上,控制主体使被控客体进行合乎目的的动作。
信息在控制过程的作用表现在:A 要根据各种有关信息才能编制出使系统与外界环境保持平衡状态的各种指令。
B 系统在运行中会碰到干扰从而使系统偏离控制目标所要求的状态,这时需要掌握干扰信息和系统状态的信息,将它们转换成为抵消或纠正偏差的控制指令,以保证系统目的的实现。
定义5(从控制与调节相互关系的角度)控制具有两个方面的内容:确定系统变化的轨道(确定目标和实现目标的途径);用调节办法使系统的运动保持在这一轨道上。
定义6 调节的定义:调节是使系统的特性保持一定的过程。
调节分为下例两种:反馈调节和补偿调节。
反馈调节:依靠系统的实际输出值与目标值之间的偏差进行调节,当偏差值=目标值与反馈值之差时,称为负反馈调节;当偏差值=目标值与反馈值之和时,称为正反馈调节(控制)。
反馈调节的特点:事先不去监测干扰的作用,不采取事先抵消干扰影响的补偿措施,只监测受控对象的实际运行情况,把输出变量的信息反向输送到输入端,与体现目标的控制变量进行比较形成误差,根据误差的大小决定控制指令,去改变对象的运行状况,逐步缩小并最后消除误差,达到控制目标。
补偿调节:预测干扰,用补偿的方式进行调节。

第一章绪论1-1 控制理论的发展历程纵观控制理论的发展历史,大体上可分为三个阶段,即古典控制理论阶段、现代控制理论阶段和大系统理论与智能控制理论阶段。
二十世纪30~40年代,奈魁斯特(H.Nyquist)、伯德(H.W.Bode)、哈里斯(H.Harris)、伊万斯(W.R.Evans)、和维纳(N.Wiener)等人为自动控制理论的形成作出了创造性的贡献,他们的著作奠定了自动控制理论的基础。
这一阶段的控制理论通常被称为古典控制理论,它是以单输入-单输出的线性定常系统为主要研究对象,以传递函数作为系统的基本描述,以频率法和根轨迹法来分析和设计控制系统的理论。
有了理论的指导,实际应用成果就会不断涌现。
这个时期的工业生产得到了迅速发展,如用于飞机的自动导航系统,以及反情报雷达和炮位跟踪系统等就是应用反馈控制理论的产物。
计算机技术突飞猛进的发展,高速、高精度的数字计算机相继推出,为控制理论的发展提供了强有力的工具。
由于航空航天技术的推动和计算机技术的支持,使控制理论的发展步入了重要的转折期,在1960年前后有了重大的突破和创新。
在这一阶段,美国学者贝尔曼(R.Bellman)提出了寻求最优控制的动态规划法,前苏联数学家庞特里雅金(Л.С.Понтрягин)论证了极大值原理,使得最优控制理论得到了极大的发展。
卡尔曼(R.E.Kalman)系统地把状态变量法引入到控制系统的分析中来,并提出了能控性、能观测性的重要概念和新的滤波理论。
这些研究成果构成了现代控制理论的基础和支柱,发展了古典控制理论,形成了自动控制理论的新体系。
现代控制理论是为解决多输入—多输出系统的控制问题而拓展的,较之古典控制理论,研究对象要广泛得多,既可以是单变量的、线性的、定常的、连续的系统,也可以是多变量的、非线性的、时变的、离散的系统。
现代控制理论以状态空间描述作为系统的数学模型,以状态变量法为基础,用时域的方法来分析和设计控制系统,它分析和设计的目标是在揭示系统内在规律的基础上,实现系统在一定意义下的最优化。


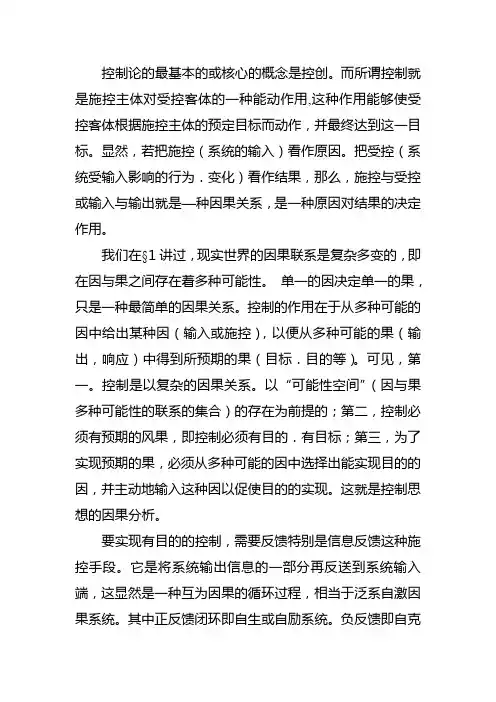
控制论的最基本的或核心的概念是控创。
而所谓控制就是施控主体对受控客体的一种能动作用,这种作用能够使受控客体根据施控主体的预定目标而动作,并最终达到这一目标。
显然,若把施控(系统的输入)看作原因。
把受控(系统受输入影响的行为.变化)看作结果,那么,施控与受控或输入与输出就是—种因果关系,是一种原因对结果的决定作用。
我们在§1讲过,现实世界的因果联系是复杂多变的,即在因与果之间存在着多种可能性。
单一的因决定单一的果,只是一种最简单的因果关系。
控制的作用在于从多种可能的因中给出某种因(输入或施控),以便从多种可能的果(输出,响应)中得到所预期的果(目标.目的等)。
可见,第一。
控制是以复杂的因果关系。
以‚可能性空间‛(因与果多种可能性的联系的集合)的存在为前提的;第二,控制必须有预期的风果,即控制必须有目的.有目标;第三,为了实现预期的果,必须从多种可能的因中选择出能实现目的的因,并主动地输入这种因以促使目的的实现。
这就是控制思想的因果分析。
要实现有目的的控制,需要反馈特别是信息反馈这种施控手段。
它是将系统输出信息的一部分再反送到系统输入端,这显然是一种互为因果的循环过程,相当于泛系自激因果系统。
其中正反馈闭环即自生或自励系统。
负反馈即自克系统。
在经典控制论中,研究输入与输出的关系往往采用传递函数方读(简称传函方法)。
对于单输入与单输出的静态系统(不随时间变化),传递函数是一种比例关系y=00b x a ⎛⎫ ⎪⎝⎭即单输入X 经过比例系数的值00b a 的变换而得到输出值y ;对于有反馈控制的静态系统,若由输入X 到输出Y 的传函是1f ,由输出Y 反馈到输入端的传函是2f 。
则整个反馈控制系统的传函即1121f f f +如图7一7所示),而对于一般动态系统,传函是在零初始条件下,系统的输入与输出的拉氏变换之比:w (S )=()()y s x s 。
从泛系因果观上看。
传递函数相当子一种泛导。
控制论是由美国数学家维纳(Wiener,N.)创立的一个综合性学科,是研究各种不同系统的共同控制规律的科学。
1948年,维纳所著的《手机器中的控制与通信》一书的出版,标志着控制论的正式诞生。
一、基本概念:可能性空间、控制、输入与输出、反馈二、控制方式与控制系统:控制方式、控制系统(一)可能性空间可能性空间是指事物在发展变化中面临的所有可能情况的全体,即各种可能状态的集合。
(二)控制人们根据确定的目的,设法改变和创造条件,对考察对象施加某种作用,使事物沿着可能性空间内某个确定方向或状态发展,这种作用就叫做控制。
控制能力是创造条件改变事物在可能性空间内的状态的能力。
控制包含三方面含义:1、控制就是施加在某个对象(系统)上的一种作用;2 、施加这种作用的目的是为了改善对象的功能,以达到预期的目标;3 、这种作用是通过信息的选择、使用来实现的。
实施控制的必备条件:1、被控对象须存在多种变化发展的可能性。
事物变化发展的可能性空间不能是单元素集合,否则,事物不可变,就谈不上控制;2、目标状态必须存在于事物变化发展的可能性空间内,并且是可以选择的3、具备一定的控制能力,能够创造一定的条件,使事物向预定的目标改变,达到控制的目的。
实施控制的三个环节:1、明确事物面临的可能性空间;2、根据确定的目标,在可能性空间中选择某一状态或某一些状态为目标;3、改变和创造条件,使事物向既定目标转化。
(一)控制方式所谓控制就是施控者选择适当的控制手段,作用于受控者,以期引起或达到受控者的行为状态发生合乎目的的变化。
控制论系统的两个基本要素:施控部分(控制部分)被控部分控制方式分为以下三种:(一) 简单控制不考虑系统承受的外部干扰和控制对象执行控制指令的效果,只根据控制目标的要求以及对象在控制作用下可能行为的认识,制定控制指令,而且要求受控对象忠实执行指令。
特点: 结构简单,操作方便,经济性好,简单可行, 适用于简单系统。
(二) 补偿控制根据控制目标来制定控制指令,同时要适时监测外部干扰,并考虑为抵消干扰可能增加的控制因素,而且要反映在控制指令中,通过控制把干扰的作用取消掉,这便是补偿控制。